GD32 移植FreeRtos,全网超详细保姆级教程!!!
本文详细介绍了FreeRTOS在Keil开发环境中的移植配置步骤:1)下载源码并解压;2)在工程中创建FreeRTOS目录结构,保留必要文件(ARM_CM4F内核支持文件及内存管理模块);3)添加源文件分组和头文件路径;4)解决编译过程中出现的错误,包括中断处理函数冲突和配置参数修改;5)提供了完整的FreeRTOSConfig.h配置文件模板,包含任务调度、内存管理、优先级设置等关键参数说明。配
1.首先我们下载Freertos的源码包
也可以直接 在官网下载:FreeRTOS™ - FreeRTOS™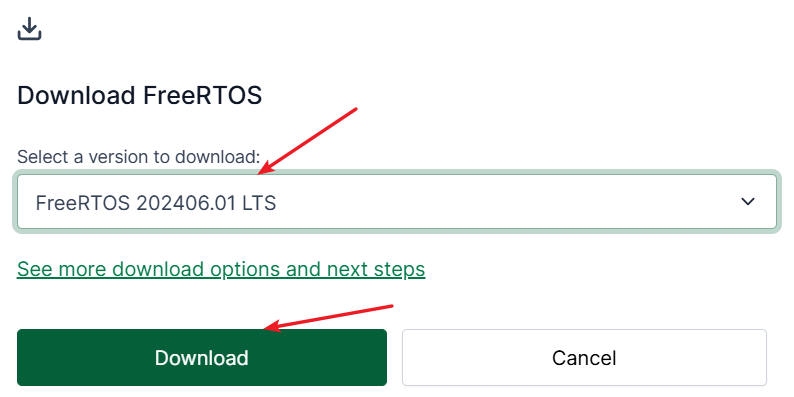
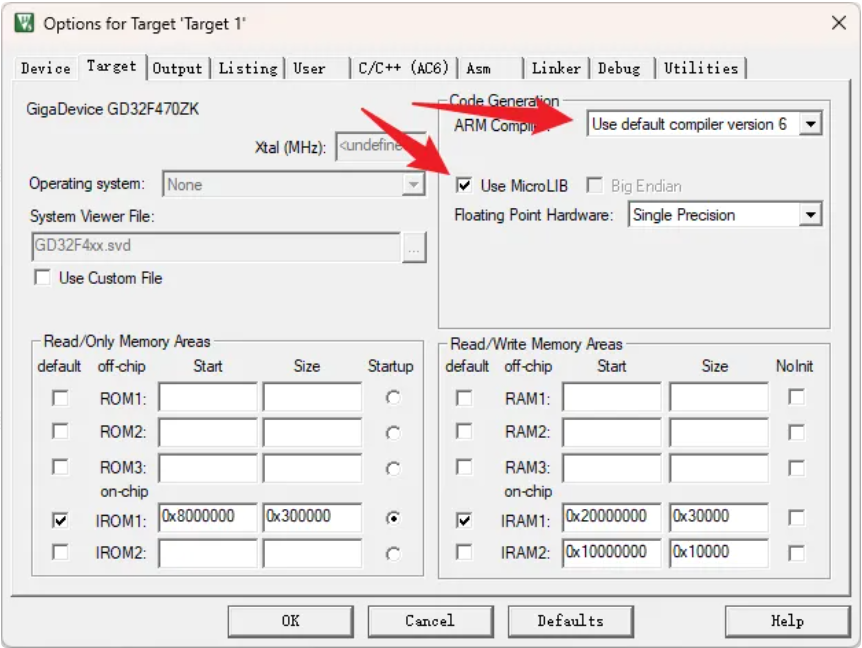
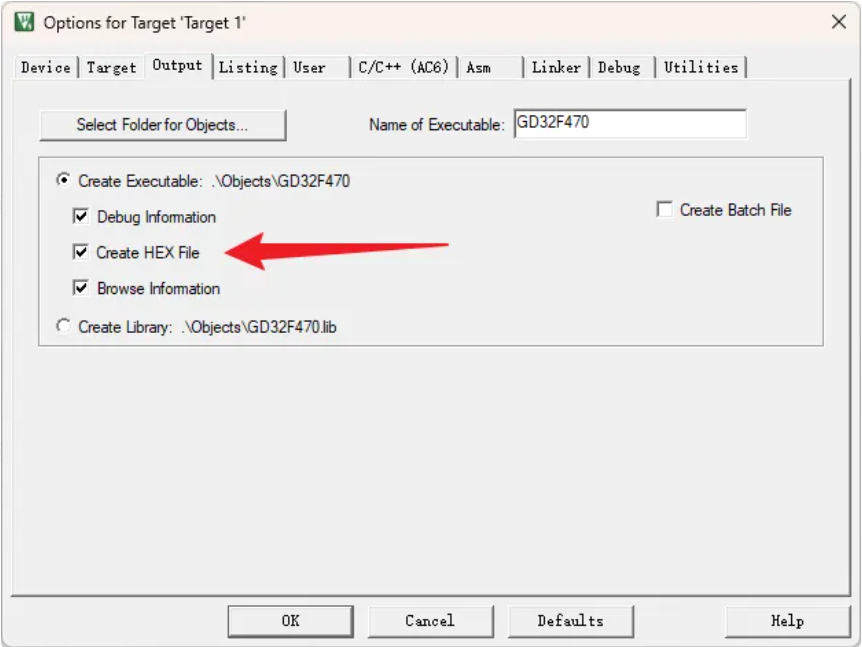
2.进入到我们的Keil的当中进行如下配置
3.对下载的压缩包进行解压
![]()
这个目录下的文件就是我们需要的文件
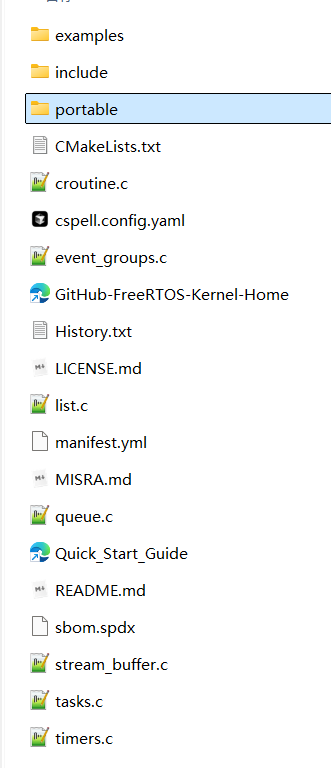
4.在你新建的FreeRTOSTemplate工程目录下,新建一个文件夹 Middleware 将FreeRTOS-Kernel放到 Middleware内

5.删除不必要的文件。来到portable目录只保留GCC和MemMang目录
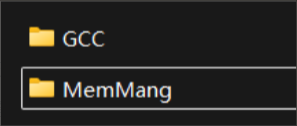
- GCC 内仅保留
ARM_CM4F,针对 ARM Cortex-M4F 内核的移植胶水代码 - MemMang:内存管理,用于 FreeRTOS 管理单片机的堆内存
6.文件添加
- 新建两个Group:
FreeRTOS_Core和FreeRTOS_Port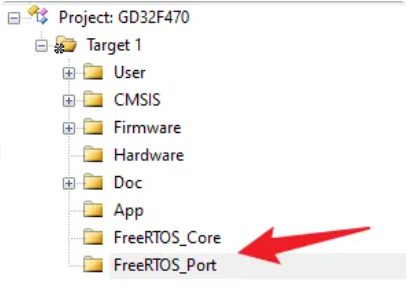
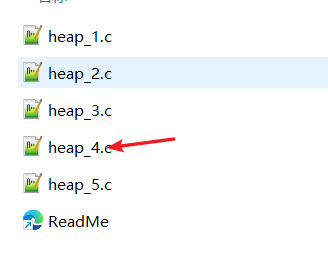
FreeRTOS_Core添加源码。源码为FreeRTOS-Kernel根目录下的c文件FreeRTOS_Port添加源码。源码为FreeRTOS-Kernel/portable/MemMang下的heap_4.c。源码为FreeRTOS-Kernel/portable/GCC/ARM_CM4F下的port.c
-
添加头文件支持
7.这个时候运行会出现报错的问题
FreeRTOS源码包。下载地址为: https://github.com/FreeRTOS/FreeRTOS/releases
下载压缩包

解决压缩包在上边的目录下找到FreeRTOSConfig.h文件
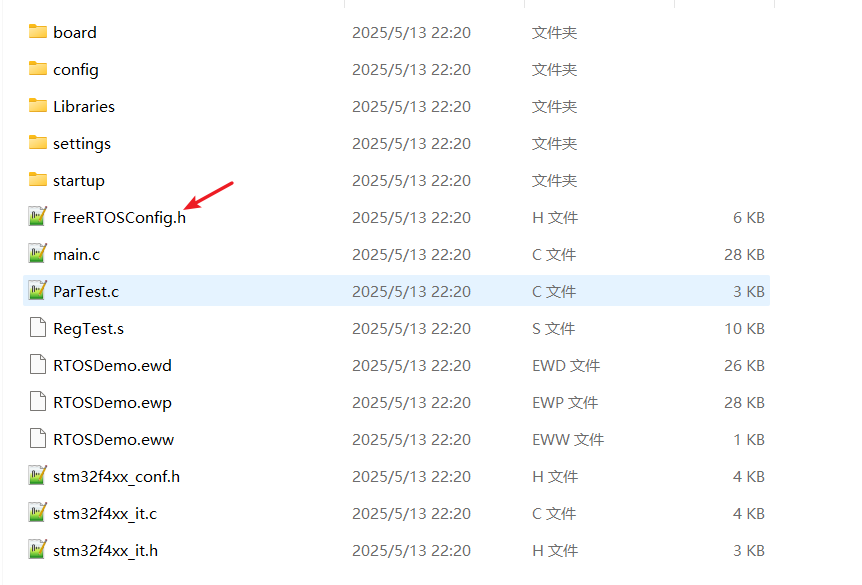
将FreeRTOSConfig.h文件拷贝到项目目录中FreeRTOS-Kernel目录下
8.编译项目,会出现以下错误:

来到FreeRTOSConfig.h文件中如下修改
这个报错问题的修改 xxx_Handler问题解决

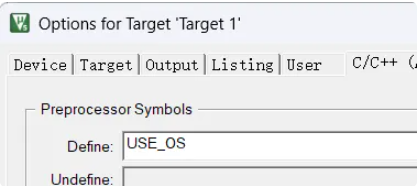
来到gd32f4xx_it.c文件中。修改三个函数SVC_Handler,PendSV_Handler,SysTick_Handler,将函数通过宏定义包裹:
#ifndef USE_OS
#endif#ifndef USE_OS
void SVC_Handler(void)
{
}
#endif
...
#ifndef USE_OS
void PendSV_Handler(void)
{
}
#endif
...
#ifndef USE_OS
void SysTick_Handler(void)
{
delay_decrement();
}
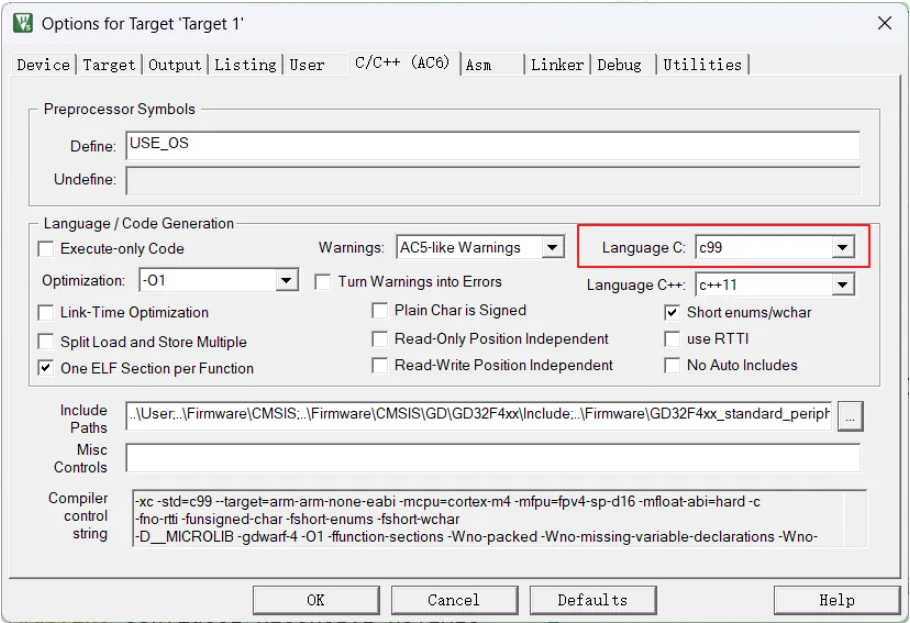
#endif配置C/C++(AC6)中的define为:USE_OS
vApplicationXXXHook问题解决

修改FreeRTOSConfig.h中的配置:
#define configCHECK_FOR_STACK_OVERFLOW 0#define configUSE_IDLE_HOOK 0#define configUSE_TICK_HOOK 0#define configUSE_MALLOC_FAILED_HOOK 09.参考推荐配置文件如下
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
/*-----------------------------------------------------------
* Application specific definitions.
*
* These definitions should be adjusted for your particular hardware and
* application requirements.
*
* THESE PARAMETERS ARE DESCRIBED WITHIN THE 'CONFIGURATION' SECTION OF THE
* FreeRTOS API DOCUMENTATION AVAILABLE ON THE FreeRTOS.org WEB SITE.
*
* See http://www.freertos.org/a00110.html
*----------------------------------------------------------*/
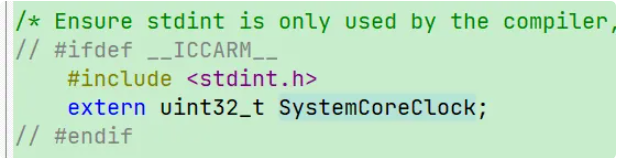
/* Ensure stdint is only used by the compiler, and not the assembler. */
#include <stdio.h>
#if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__)
#include <stdint.h>
extern uint32_t SystemCoreClock;
#endif
/* 带默认值参数 */
#define configSUPPORT_DYNAMIC_ALLOCATION 1 /* 支持动态创建任务,默认为1 */
#define configSUPPORT_STATIC_ALLOCATION 0 /* 1: 支持静态申请内存, 默认: 0 */
#define configUSE_PREEMPTION 1 /* 为 1 时使用抢占式调度器,为 0 时使用协程 */
#define configUSE_IDLE_HOOK 0 /* 为 1 时使用空闲任务钩子函数,用户需要实现空闲任务钩子函数 */
#define configUSE_TICK_HOOK 0 /* 为 1 时使能时间片钩子函数,用户需要实现时间片钩子函数 */
#define configCPU_CLOCK_HZ ( SystemCoreClock ) /* CPU主频 */
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 ) /* 系统时钟节拍频率:1秒中断的次数 */
#define configMAX_PRIORITIES ( 5 ) /* 最大优先级数(Max: 32):最大优先级为configMAX_PRIORITIES - 1 */
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 130 ) /* 空闲任务的栈大小:单位(Word字),字节数130x4 */
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 75 * 1024 ) ) /* 任务堆大小75KByte */
#define configMAX_TASK_NAME_LEN ( 12 ) /* 任务名最大字符数量:默认16 */
#define configUSE_TRACE_FACILITY 1 /* 为 1 启用可视化跟踪调试 */
#define configUSE_16_BIT_TICKS 0 /* 系统时钟节拍计数器数据类型:1表示16bit无符号整型,0表示32bit无符号整型 */
#define configIDLE_SHOULD_YIELD 1 /* 为 1,说明空闲任务需要让出时间片给同优先级的其他就绪任务。*/
#define configUSE_MUTEXES 1 /* 为 1 时使用互斥信号量,相关的 API 函数会被编译。*/
#define configQUEUE_REGISTRY_SIZE 8 /* 设置可以注册的队列和信号量的最大数量,在使用内核调试器查看信号量和队列时需要设置此宏*/
#define configCHECK_FOR_STACK_OVERFLOW 0 /* 设置堆栈溢出检测规则 */
#define configUSE_RECURSIVE_MUTEXES 1 /* 为 1 时使用递归互斥信号量,相关的 API 函数会被编译。 */
#define configUSE_MALLOC_FAILED_HOOK 0 /* 为 1 时使用内存分配失败钩子函数,用户需要实现内存分配失败钩子函数 */
#define configUSE_APPLICATION_TASK_TAG 0 /* 为 1 时configUSE_APPLICATION_TASK_TAGF() 和xTaskCallApplicationTaskHook()会被编译*/
#define configUSE_COUNTING_SEMAPHORES 1 /* 设置为 1 的时候启用计数型信号量,相关的 API 函数会被编译。*/
#define configGENERATE_RUN_TIME_STATS 0 /* 为 1 时开启时间统计功能,相应的 API 函数会被编译。 */
/* Software timer definitions. */
#define configUSE_TIMERS 1 /* 使能定时器 */
#define configTIMER_TASK_PRIORITY ( 2 ) /* 守护任务的优先级, 尽可能高一些 */
#define configTIMER_QUEUE_LENGTH 10 /* Timer命令队列长度 */
#define configTIMER_TASK_STACK_DEPTH ( configMINIMAL_STACK_SIZE * 2 ) /* 守护任务的栈大小 */
/* Set the following definitions to 1 to include the API function,
or zero to exclude the API function. */
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1 /* 删除任务 */
#define INCLUDE_vTaskCleanUpResources 1
#define INCLUDE_vTaskSuspend 1 /* 挂起任务 */
#define INCLUDE_xTaskResumeFromISR 1 /* 恢复在中断中挂起的任务 */
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
/* Cortex-M specific definitions. */
#ifdef __NVIC_PRIO_BITS
/* __BVIC_PRIO_BITS will be specified when CMSIS is being used. */
#define configPRIO_BITS __NVIC_PRIO_BITS
#else
#define configPRIO_BITS 4 /* 15 priority levels */
#endif
/* The lowest interrupt priority that can be used in a call to a "set priority"
function. */
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 0x0f
/* The highest interrupt priority that can be used by any interrupt service
routine that makes calls to interrupt safe FreeRTOS API functions. DO NOT CALL
INTERRUPT SAFE FREERTOS API FUNCTIONS FROM ANY INTERRUPT THAT HAS A HIGHER
PRIORITY THAN THIS! (higher priorities are lower numeric values. */
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5
/* Interrupt priorities used by the kernel port layer itself. These are generic
to all Cortex-M ports, and do not rely on any particular library functions. */
#define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
/* !!!! configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to zero !!!!
See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html. */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
/* Normal assert() semantics without relying on the provision of an assert.h
header file. */
/* 断言结果通过printf输出 */
#define vAssertCalled(char, int) printf("-> Error: %s, %d\r\n", char, int)
#define configASSERT( x ) if( ( x ) == 0 ) vAssertCalled( __FILE__, __LINE__ )
//#define configASSERT( x ) if( ( x ) == 0 ) { taskDISABLE_INTERRUPTS(); for( ;; ); }
//#define configASSERT( x ) 0
/* Definitions that map the FreeRTOS port interrupt handlers to their CMSIS
standard names. */
#ifdef SYS_SUPPORT_OS
#define vPortSVCHandler SVC_Handler
#define xPortPendSVHandler PendSV_Handler
#define xPortSysTickHandler SysTick_Handler
#endif
#endif /* FREERTOS_CONFIG_H */
智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 7
7 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)