【STM32】CubeMX(十):FreeRTOS任务创建与删除
本文介绍了如何在STM32上使用HAL库结合FreeRTOS实现任务创建与删除机制。主要内容包括:通过CubeMX配置FreeRTOS参数,创建两个任务分别控制LED闪烁;详细说明了任务控制块(TCB)结构和任务生命周期管理;给出了具体的代码实现,其中StartTask在运行10次后自动删除,而myTask01保持常驻运行。文章还提供了CubeMX的配置截图和关键代码片段,完整展示了从工程配置到任
在 STM32 使用 HAL 库 实现 FreeRTOS 的任务创建与删除机制,是实现多任务并发管理的基础操作。通过 HAL + FreeRTOS 的结合,可以简单地控制任务生命周期,实现任务的启动、运行、暂停、删除等操作。
一、FreeRTOS 任务机制原理(基于 HAL 库)
FreeRTOS 是一个轻量级、开源、可移植的 实时操作系统内核,支持任务调度、时间管理、同步通信等功能。在 HAL + FreeRTOS 框架下,任务创建与删除机制通过 osThreadCreate 和 vTaskDelete 实现,配合 CubeMX 可快速简单地构建复杂多任务系统。
🧩 任务控制块(TCB)
每一个任务在内核中都有一个对应的任务控制块(TCB),包含:
- 栈指针
- 优先级
- 任务状态:就绪 / 等待 / 运行 / 挂起 / 删除
- 任务函数入口地址
这里我简单地创建两个任务:
分别控制 绿灯(PC7) 和 蓝灯(PC8) 闪烁
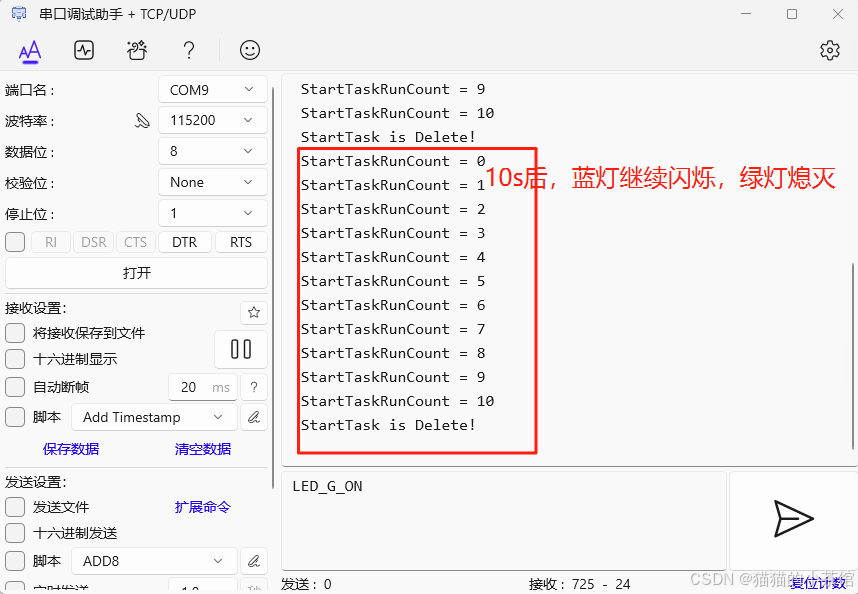
在运行 10 次后自动删除其中一个任务(绿灯任务)
✅ 工程目标
任务1(StartTask) 控制绿灯闪烁(LED_G),10次后自动删除
任务2(myTask01) 控制蓝灯闪烁(LED_B),常驻运行
10秒后删除任务 使用 vTaskDelete() 删除 StartTask 自己
📁 工程目录结构
| 文件 | 功能 |
|---|---|
main.c |
系统初始化,启动 FreeRTOS |
freertos.c |
创建任务,任务函数定义 |
usart.c |
串口打印支持 |
gpio.c |
LED 控制引脚初始化 |
| CubeMX 配置(如下图示配置) | 启用了 FreeRTOS,两个任务,TIM6 为时间基准 |
🧪 二、CubeMX 配置说明
✅ 1. 安装和启用 FreeRTOS
见图 1:在 Software Packs 中启用 X-CUBE-FREERTOS
确认有FreeRTOS组件,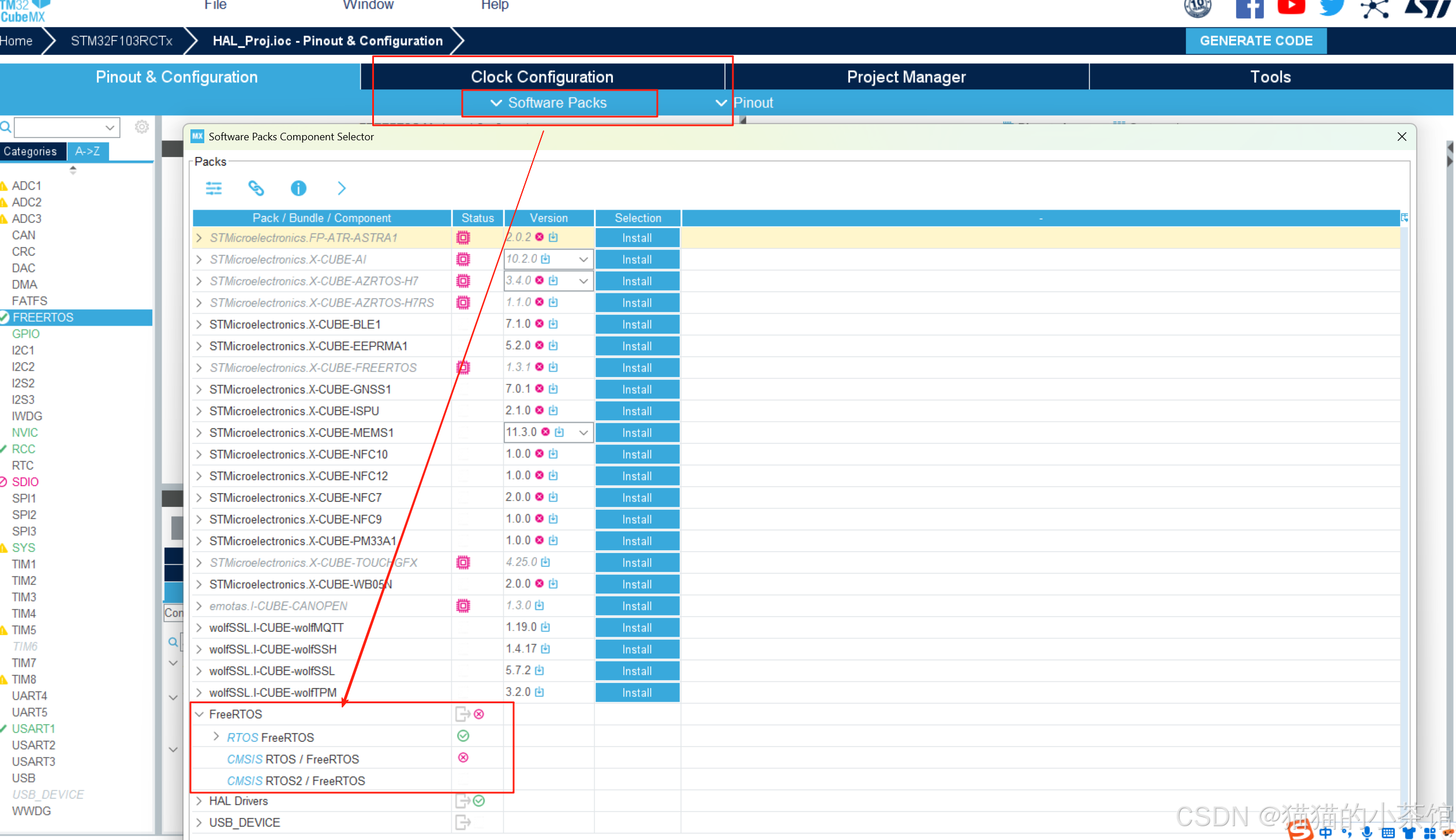
✅ 2. 配置 FreeRTOS 参数
见图 2:设置堆大小 / 优先级 / 是否使用空闲钩子等。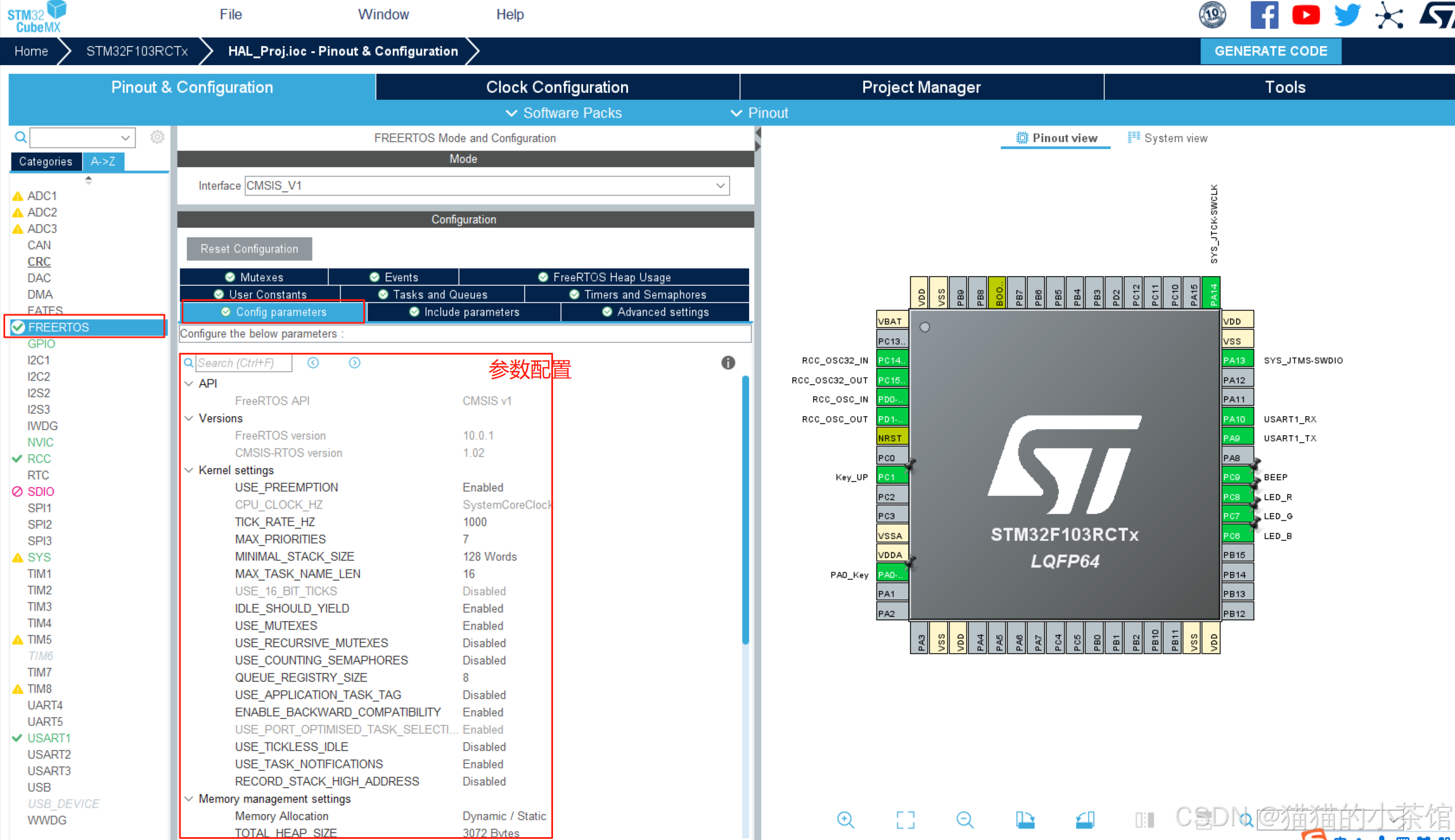
✅ 3. 创建任务
见图 3:配置两个任务 StartTask 和 myTask01,分别绑定函数。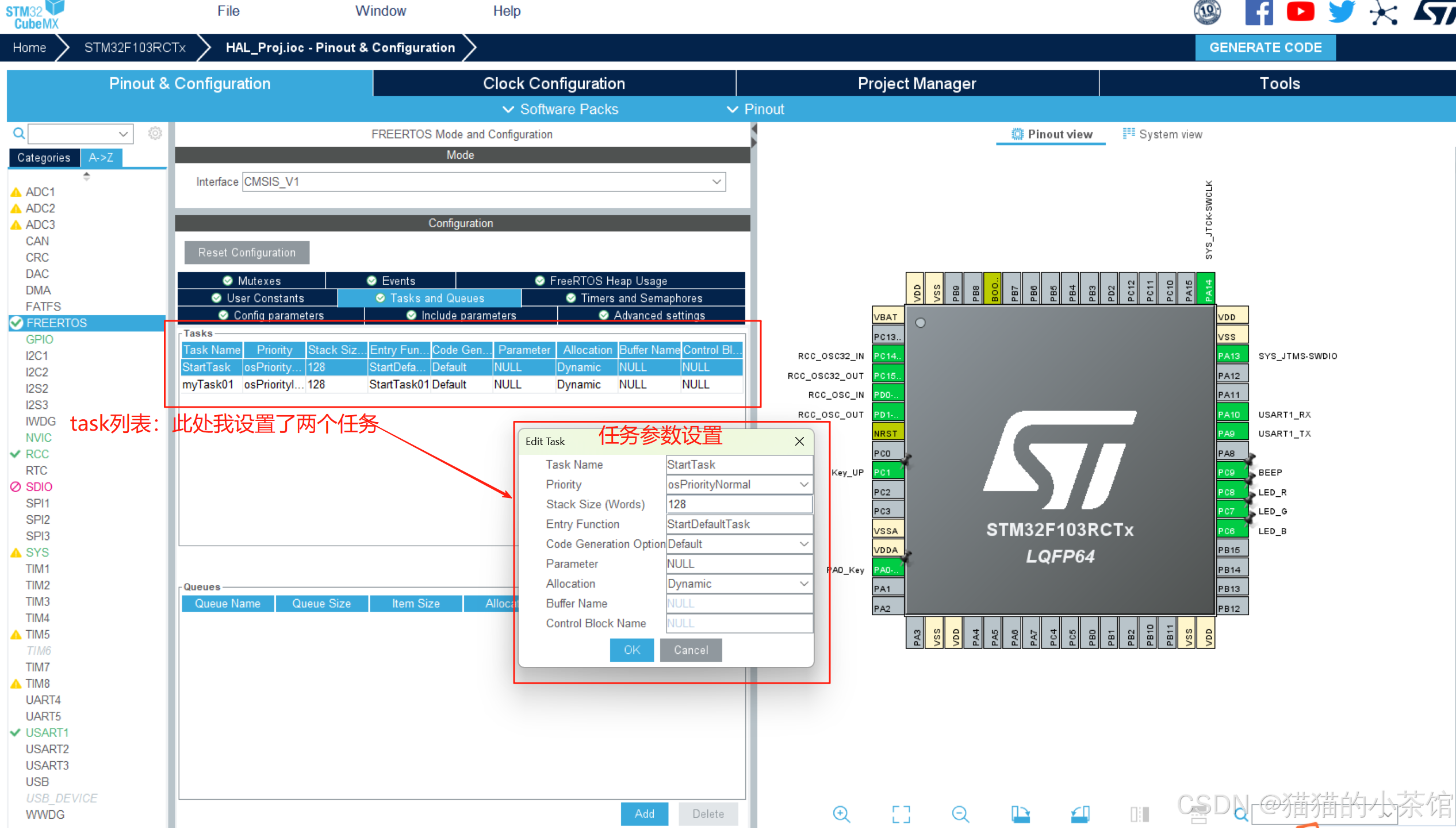
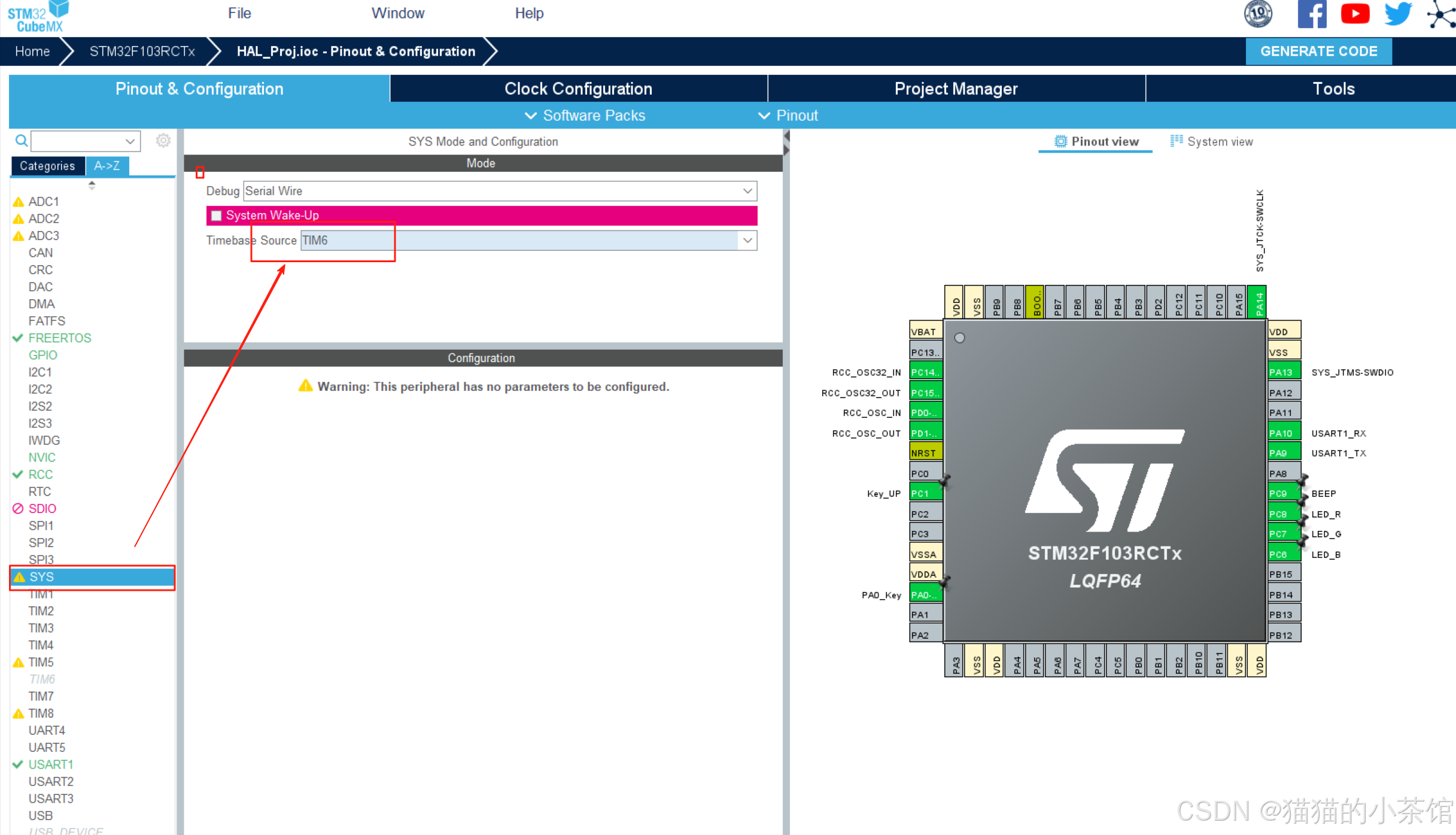
✅ 4. 设置时基源
见图 4:将 Timebase Source 设为 TIM6(用于 HAL_Delay 和 osDelay)
FreeRTOS 和 SYSTICK 不能冲突,这里我们用基本定时器 TIM6 为 FreeRTOS 提供时钟来源。
🧪 三、FreeRTOS 任务创建与删除机制
🔹 任务创建(CubeMX 自动生成)
StartTask:
osThreadDef(StartTask, StartDefaultTask, osPriorityNormal, 0, 128);
StartTaskHandle = osThreadCreate(osThread(StartTask), NULL);
myTask01:
osThreadDef(myTask01, StartTask01, osPriorityIdle, 0, 128);
myTask01Handle = osThreadCreate(osThread(myTask01), NULL);
🔹 任务删除
vTaskDelete(StartTaskHandle); // 删除 StartTask
💡 注:任务自己删除自己时,也可使用:
vTaskDelete(NULL);
任务函数
✅ StartDefaultTask(控制绿灯)
void StartDefaultTask(void const * argument)
{
uint32_t StartTaskRunCount = 0;
for(;;)
{
HAL_GPIO_TogglePin(LED_G_GPIO_Port, LED_G_Pin); // 绿灯闪烁
if (StartTaskRunCount > 10)
{
printf("StartTask is Delete!\r\n");
HAL_GPIO_WritePin(LED_G_GPIO_Port, LED_G_Pin, GPIO_PIN_SET); // 熄灭绿灯
vTaskDelete(StartTaskHandle); // 删除任务
}
printf("StartTaskRunCount = %d\r\n", StartTaskRunCount++);
osDelay(500); // 每500ms执行一次
}
}
✅ StartTask01(控制蓝灯)
void StartTask01(void const * argument)
{
for(;;)
{
HAL_GPIO_TogglePin(LED_B_GPIO_Port, LED_B_Pin); // 蓝灯闪烁
osDelay(500);
}
}
完整代码
📄 freertos.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* File Name : freertos.c
* Description : Code for freertos applications
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
/* USER CODE END Variables */
osThreadId StartTaskHandle;
osThreadId myTask01Handle;
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
void StartDefaultTask(void const * argument);
void StartTask01(void const * argument);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/* GetIdleTaskMemory prototype (linked to static allocation support) */
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize );
/* USER CODE BEGIN GET_IDLE_TASK_MEMORY */
static StaticTask_t xIdleTaskTCBBuffer;
static StackType_t xIdleStack[configMINIMAL_STACK_SIZE];
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTCBBuffer;
*ppxIdleTaskStackBuffer = &xIdleStack[0];
*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
/* place for user code */
}
/* USER CODE END GET_IDLE_TASK_MEMORY */
/**
* @brief FreeRTOS initialization
* @param None
* @retval None
*/
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* definition and creation of StartTask */
osThreadDef(StartTask, StartDefaultTask, osPriorityNormal, 0, 128);
StartTaskHandle = osThreadCreate(osThread(StartTask), NULL);
/* definition and creation of myTask01 */
osThreadDef(myTask01, StartTask01, osPriorityIdle, 0, 128);
myTask01Handle = osThreadCreate(osThread(myTask01), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartDefaultTask */
/**
* @brief Function implementing the StartTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{
/* USER CODE BEGIN StartDefaultTask */
uint32_t StartTaskRunCount = 0;
/* Infinite loop */
for(;;)
{
// 控制PC7绿灯的亮灭
HAL_GPIO_TogglePin(LED_G_GPIO_Port, LED_G_Pin);
if(StartTaskRunCount > 10)
{
if(StartTaskHandle != NULL)
{
printf("StartTask is Delete! \r\n ");
HAL_GPIO_WritePin(LED_G_GPIO_Port, LED_G_Pin, GPIO_PIN_SET); //熄灭绿灯
vTaskDelete( StartTaskHandle ); //删除任务
}
}
printf("StartTaskRunCount = %d \r\n ",StartTaskRunCount++);
osDelay(500);
}
/* USER CODE END StartDefaultTask */
}
/* USER CODE BEGIN Header_StartTask01 */
/**
* @brief Function implementing the myTask01 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask01 */
void StartTask01(void const * argument)
{
/* USER CODE BEGIN StartTask01 */
/* Infinite loop */
for(;;)
{
HAL_GPIO_TogglePin(LED_B_GPIO_Port, LED_B_Pin);
osDelay(500);
}
/* USER CODE END StartTask01 */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
/* USER CODE END Application */
📄 main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "string.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
void MX_FREERTOS_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_UARTEx_ReceiveToIdle_IT( &huart1 , U1RxData, U1RxDataSize);
/* USER CODE END 2 */
/* Call init function for freertos objects (in freertos.c) */
MX_FREERTOS_Init();
/* Start scheduler */
osKernelStart();
/* We should never get here as control is now taken by the scheduler */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief Period elapsed callback in non blocking mode
* @note This function is called when TIM6 interrupt took place, inside
* HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment
* a global variable "uwTick" used as application time base.
* @param htim : TIM handle
* @retval None
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
/* USER CODE BEGIN Callback 0 */
/* USER CODE END Callback 0 */
if (htim->Instance == TIM6) {
HAL_IncTick();
}
/* USER CODE BEGIN Callback 1 */
/* USER CODE END Callback 1 */
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
四、串口输出效果(调试验证)
注意事项:
问题 说明
任务删除无效 vTaskDelete() 只能删除已经创建的任务句柄
StartTaskHandle 为 NULL 任务可能未创建成功或使用错误句柄
任务删除后还运行? 检查是否在 osDelay 外使用了 vTaskDelete(NULL)
串口乱码 检查波特率是否 115200 一致
当前的例子当然十分简单,仅仅作为介绍CubeMX中FreeRTOS的配置用,在此基础上,如若控制串口打印时的冲突时,任务可以使用互斥量;你还可以 添加定时器任务:用软件定时器自动删除任务;通过实现任务优先级切换,观察任务调度变化;如果使用 vTaskSuspend 替代删除,挂起任务代替销毁,可后续恢复。
以上。相较于 标准库而言,配合 CubeMX 可视化配置真是 大大简化了多任务系统的开发流程。在项目中,通过 FreeRTOS 任务创建与删除机制,我们可以让 STM32 多任务运行更加灵活、可控。在许多项目中,FreeRTOS 如基石一般随处可见,请务必掌握。
以上,欢迎有从事同行业的电子信息工程、互联网通信、嵌入式开发的朋友共同探讨与提问,我可以提供实战演示或模板库。希望内容能够对你产生帮助!

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 29
29 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)