零基础入门Arduino:舵机控制从0到180度的完美旋转
·
我想大家已经掌握了最基础的点灯了,今天让我们学习控制一个新的东西-舵机。在开始之前,我先给大家普及一下舵机的相关知识。
舵机的工作原理
舵机是一种带有闭环控制系统的电机,通过接收PWM(脉宽调制)信号来控制输出轴的角度。内部包含电机、减速齿轮组、电位器和控制电路。电位器检测当前角度,控制电路比较目标信号与当前角度,驱动电机转动至目标位置。
舵机的核心参数
- 工作电压:常见4.8V~6V,高压舵机可达7.4V。
- 扭矩:单位kg·cm,表示舵机在1cm力臂上可输出的力矩。
- 速度:单位秒/60°,指转动60度所需时间。
- 转动范围:标准舵机为0°~180°,连续旋转舵机可无限转动。
控制信号要求
舵机通过PWM信号控制,典型参数如下:
- 周期:通常20ms(50Hz)。
- 脉宽范围:0.5ms~2.5ms,对应0°~180°(标准舵机)。
舵机类型
- 标准舵机:角度固定范围,适合机械臂、机器人关节。
- 连续旋转舵机:可360°旋转,替代直流电机,需控制转速和方向。
- 数字舵机:响应更快,精度更高,支持更高频率控制信号。
- 高压舵机:支持7.4V以上电压,提供更大扭矩。
常见问题与解决
- 抖动:检查电源是否稳定,确保供电电流足够(建议单独供电)。
- 无法转动:确认信号线连接正确,PWM信号参数是否符合要求。
- 发热严重:避免长时间堵转,减少机械负载或选择更高扭矩型号。
应用场景
- 机器人关节控制
- 遥控模型(车/船/飞机)
- 自动化设备(如摄像头云台)
- 教育项目(如机械臂实验)
了解完舵机,让我们开始今天的学习!
硬件准备
- Arduino开发板(如Arduino Uno)
- 舵机(如SG90)
- 杜邦线若干
- 面包板(可选)
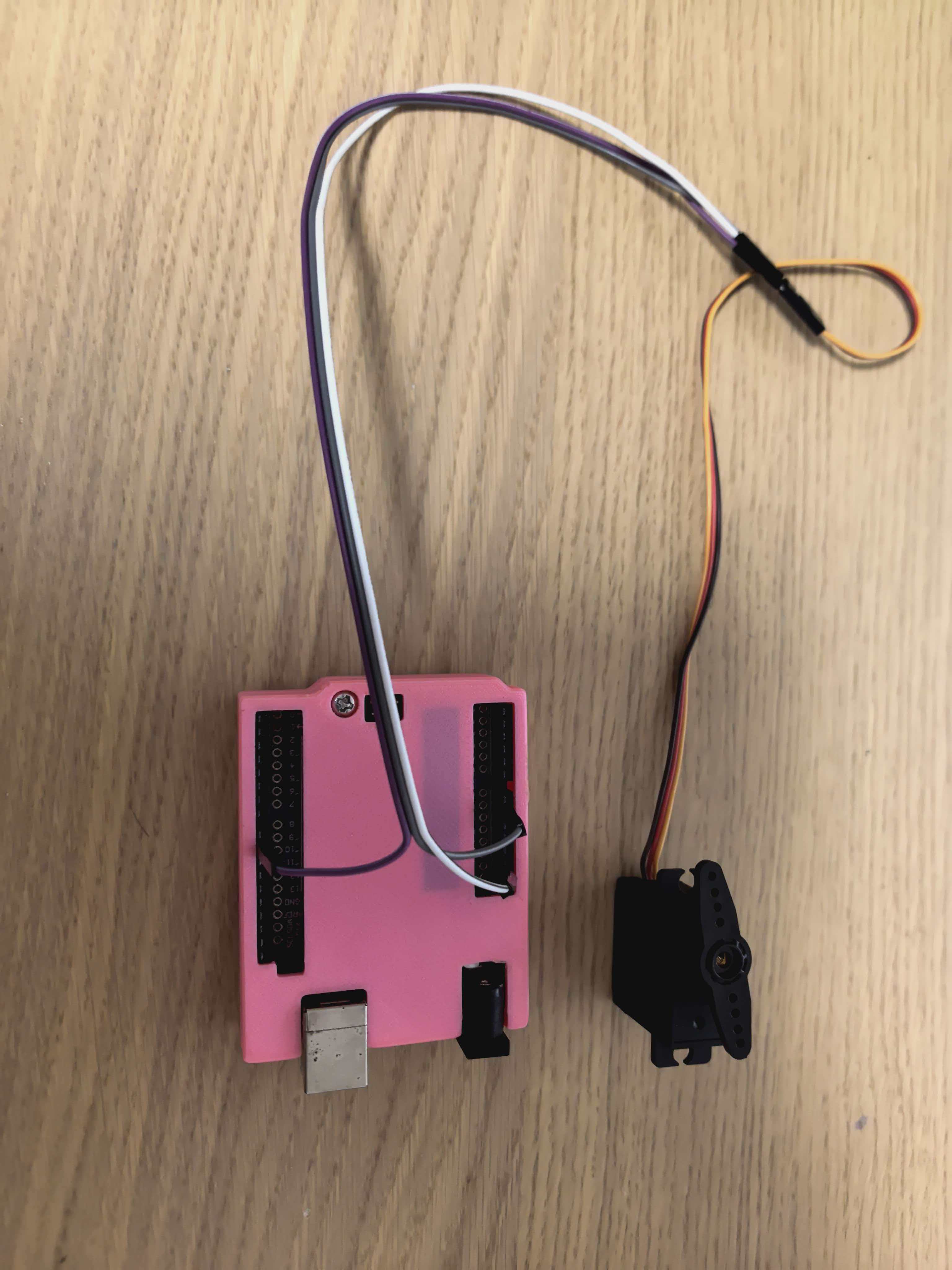
连接电路
舵机有三根线:电源线(红色)、地线(棕色/黑色)、信号线(黄色/橙色)。
- 舵机电源线接Arduino的5V引脚
- 舵机地线接Arduino的GND引脚
- 舵机信号线接Arduino的数字引脚(如9号引脚)
安装Servo库
Arduino IDE自带Servo库,无需额外安装。若需确认,可通过菜单栏选择:草图 > 包含库 > Servo。
编写代码
以下代码实现舵机从0度到180度往复转动:
#include <Servo.h>
Servo myservo; // 创建舵机对象
int pos = 0; // 存储舵机角度
void setup() {
myservo.attach(9); // 将舵机连接到9号引脚
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // 0°→180°
myservo.write(pos); // 设置舵机角度
delay(15); // 等待舵机转动
}
for (pos = 180; pos >= 0; pos -= 1) { // 180°→0°
myservo.write(pos);
delay(15);
}
}
注意事项
- 若舵机功率较大(如MG996R),需外接电源,避免Arduino板载稳压器过载。
delay()时间影响转动速度,可根据实际需求调整。- 舵机角度范围通常为0°~180°,部分型号可能略有差异。
谢谢大家的观看,同时如果喜欢3d打印和嵌入式开发的可以私信我!

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 9
9 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)