基于STM32和FreeRTOS的Modbus从机设备开发实践:实现主机与从机之间的数据传输
通过以上步骤,我们成功地在STM32上实现了Modbus从机功能。结合FreeRTOS,我们可以轻松管理多个任务,实现更复杂的应用。Modbus协议虽然简单,但在工业控制中非常实用,掌握它对于嵌入式开发者来说非常有帮助。如果你有任何问题或建议,欢迎在评论区留言。下次我们再来聊聊如何在STM32上实现Modbus TCP,敬请期待!
基于STM32freeRTOS的modbus从机设备 让STM32做从机,modbus上位机做主机。 进行数据的传输。
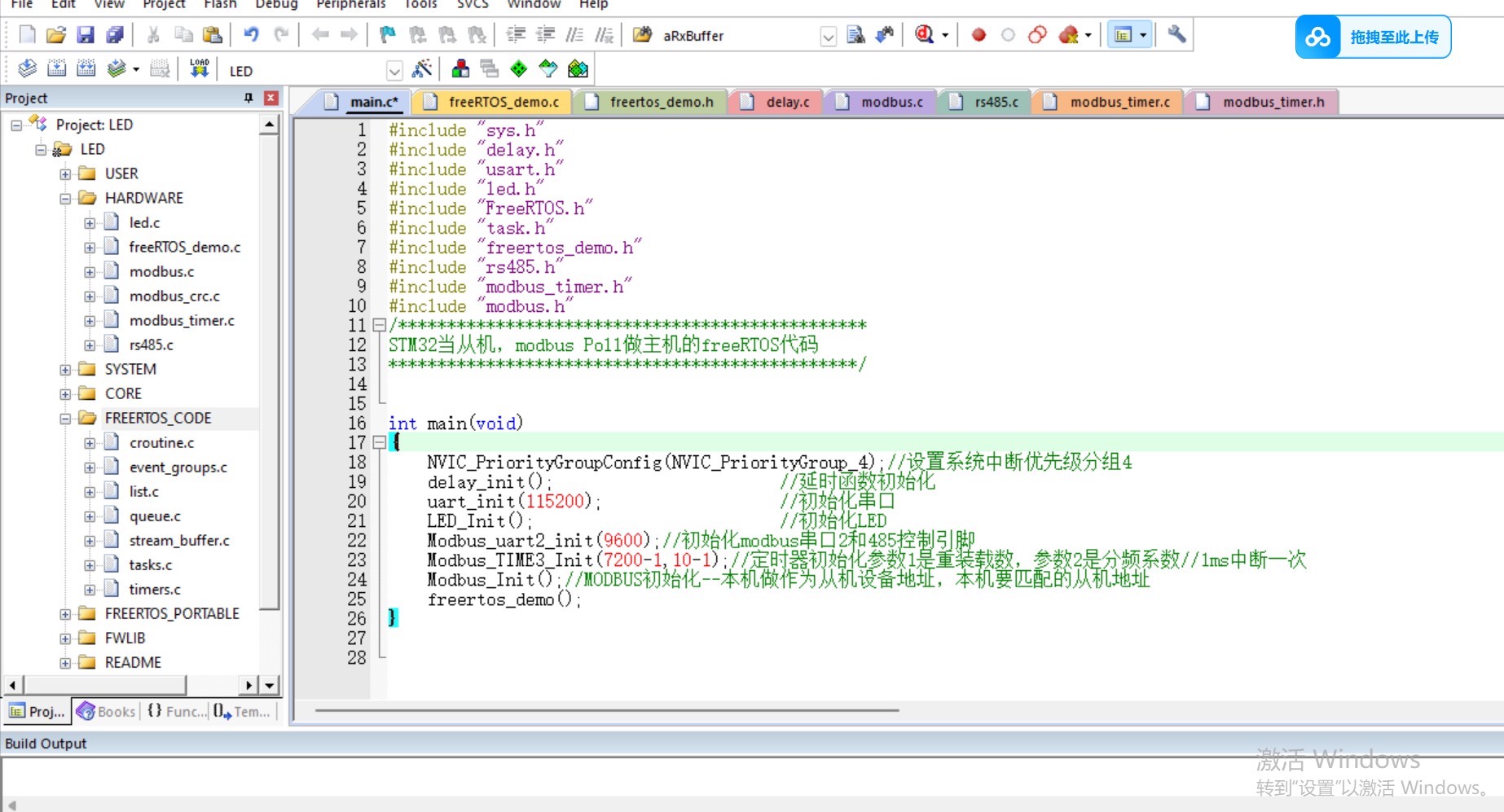
最近在搞一个基于STM32和FreeRTOS的Modbus从机设备,感觉挺有意思的。Modbus协议在工业领域应用广泛,STM32作为一款性价比极高的微控制器,结合FreeRTOS实时操作系统,可以轻松实现Modbus从机功能。今天就来聊聊怎么让STM32做从机,Modbus上位机做主机,进行数据的传输。
首先,我们需要一个Modbus库。市面上有很多开源的Modbus库,我选择了FreeMODBUS,因为它轻量且易于集成。接下来,我们来看看怎么在STM32上跑起来。
1. 环境搭建
首先,确保你的开发环境已经配置好。我使用的是STM32CubeMX和Keil MDK。STM32CubeMX可以帮助我们快速生成初始化代码,Keil MDK则用来编译和调试。
2. 配置FreeRTOS
在STM32CubeMX中,我们首先需要配置FreeRTOS。选择Middleware -> FREERTOS,然后启用它。FreeRTOS会为我们提供一个任务调度器,方便我们管理多个任务。
3. 配置Modbus
接下来,我们需要配置Modbus。FreeMODBUS库需要一个定时器来实现Modbus的RTU模式。我们选择一个定时器,比如TIM2,配置它为1ms的定时中断。
void MX_TIM2_Init(void)
{
htim2.Instance = TIM2;
htim2.Init.Prescaler = 84 - 1; // 84MHz / 84 = 1MHz
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 1000 - 1; // 1ms
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
HAL_TIM_Base_Init(&htim2);
HAL_TIM_Base_Start_IT(&htim2);
}4. 初始化Modbus
在main.c中,我们需要初始化Modbus。FreeMODBUS库提供了一个eMBInit函数,用来初始化Modbus协议栈。
#include "mb.h"
#include "mbutils.h"
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_TIM2_Init();
MX_FREERTOS_Init();
// 初始化Modbus RTU模式,波特率9600,从机地址1
eMBInit(MB_RTU, 1, 0, 9600, MB_PAR_NONE);
// 启动Modbus协议栈
eMBEnable();
// 启动FreeRTOS调度器
osKernelStart();
while (1)
{
}
}5. 实现Modbus回调函数
Modbus从机需要处理主机的读写请求。FreeMODBUS库提供了几个回调函数,我们需要实现它们。
eMBErrorCode eMBRegInputCB(UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs)
{
// 处理读输入寄存器请求
for (int i = 0; i < usNRegs; i++)
{
pucRegBuffer[i] = ReadInputRegister(usAddress + i);
}
return MB_ENOERR;
}
eMBErrorCode eMBRegHoldingCB(UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs, eMBRegisterMode eMode)
{
// 处理读/写保持寄存器请求
if (eMode == MB_REG_READ)
{
for (int i = 0; i < usNRegs; i++)
{
pucRegBuffer[i] = ReadHoldingRegister(usAddress + i);
}
}
else if (eMode == MB_REG_WRITE)
{
for (int i = 0; i < usNRegs; i++)
{
WriteHoldingRegister(usAddress + i, pucRegBuffer[i]);
}
}
return MB_ENOERR;
}6. 创建任务
在FreeRTOS中,我们可以创建一个任务来处理Modbus通信。这个任务会不断调用eMBPoll函数,处理Modbus请求。
void ModbusTask(void const * argument)
{
for (;;)
{
eMBPoll();
osDelay(1);
}
}7. 编译和调试
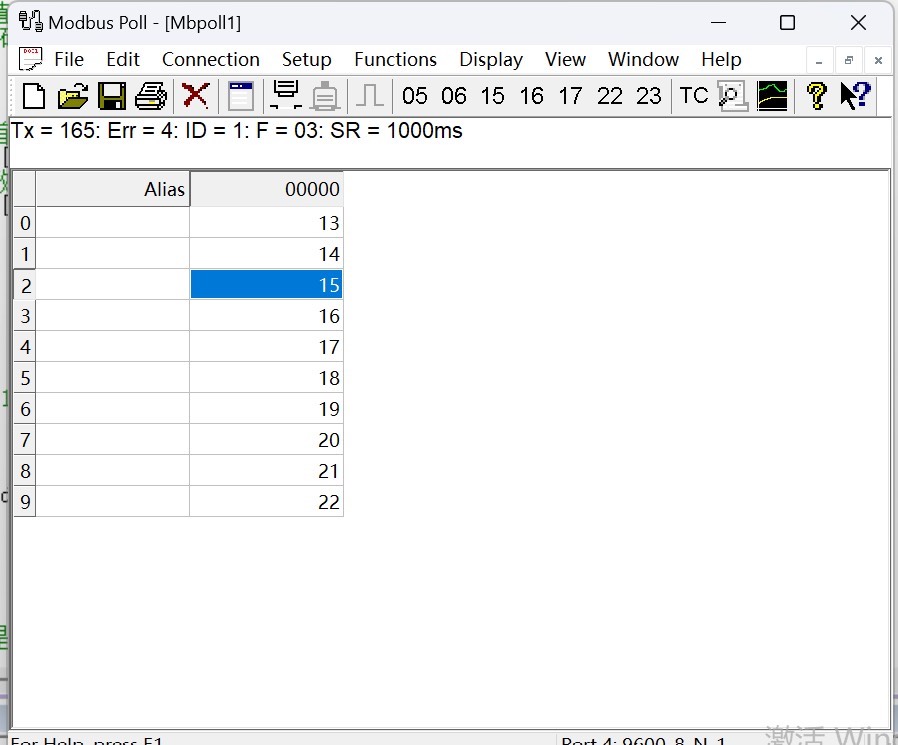
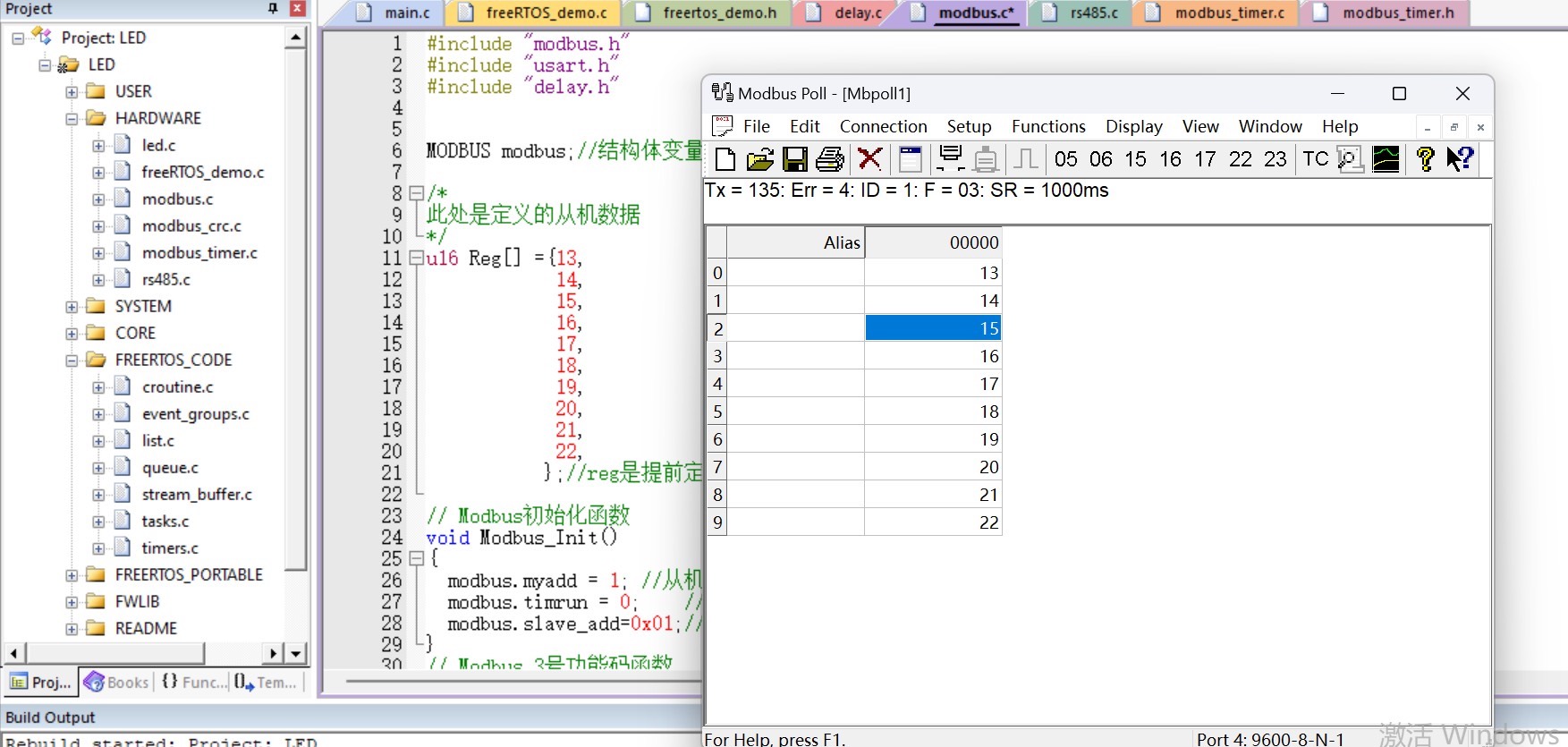
最后,编译代码并下载到STM32上。使用Modbus上位机软件(如Modbus Poll)进行测试,看看是否能正常读写寄存器。
总结
通过以上步骤,我们成功地在STM32上实现了Modbus从机功能。结合FreeRTOS,我们可以轻松管理多个任务,实现更复杂的应用。Modbus协议虽然简单,但在工业控制中非常实用,掌握它对于嵌入式开发者来说非常有帮助。
如果你有任何问题或建议,欢迎在评论区留言。下次我们再来聊聊如何在STM32上实现Modbus TCP,敬请期待!

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 3
3 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)