⭐ 基于 STM32 机器视觉的智能自动驾驶小车
【摘要】基于STM32的智能自动驾驶小车系统集成了OpenMV视觉识别、灰度巡线及红外避障三大核心功能。系统通过灰度传感器实现PID巡线控制,结合OpenMV完成红绿灯识别(红灯停/绿灯行),并配备红外避障保障行驶安全。项目提供完整开发资料(原理图、源码、视频),支持功能扩展(蓝牙遥控、LCD显示等),适用于课程设计、竞赛及毕业设计。具备模块化设计特点,可提供实物定制与长期技术支持,是学习嵌入式开
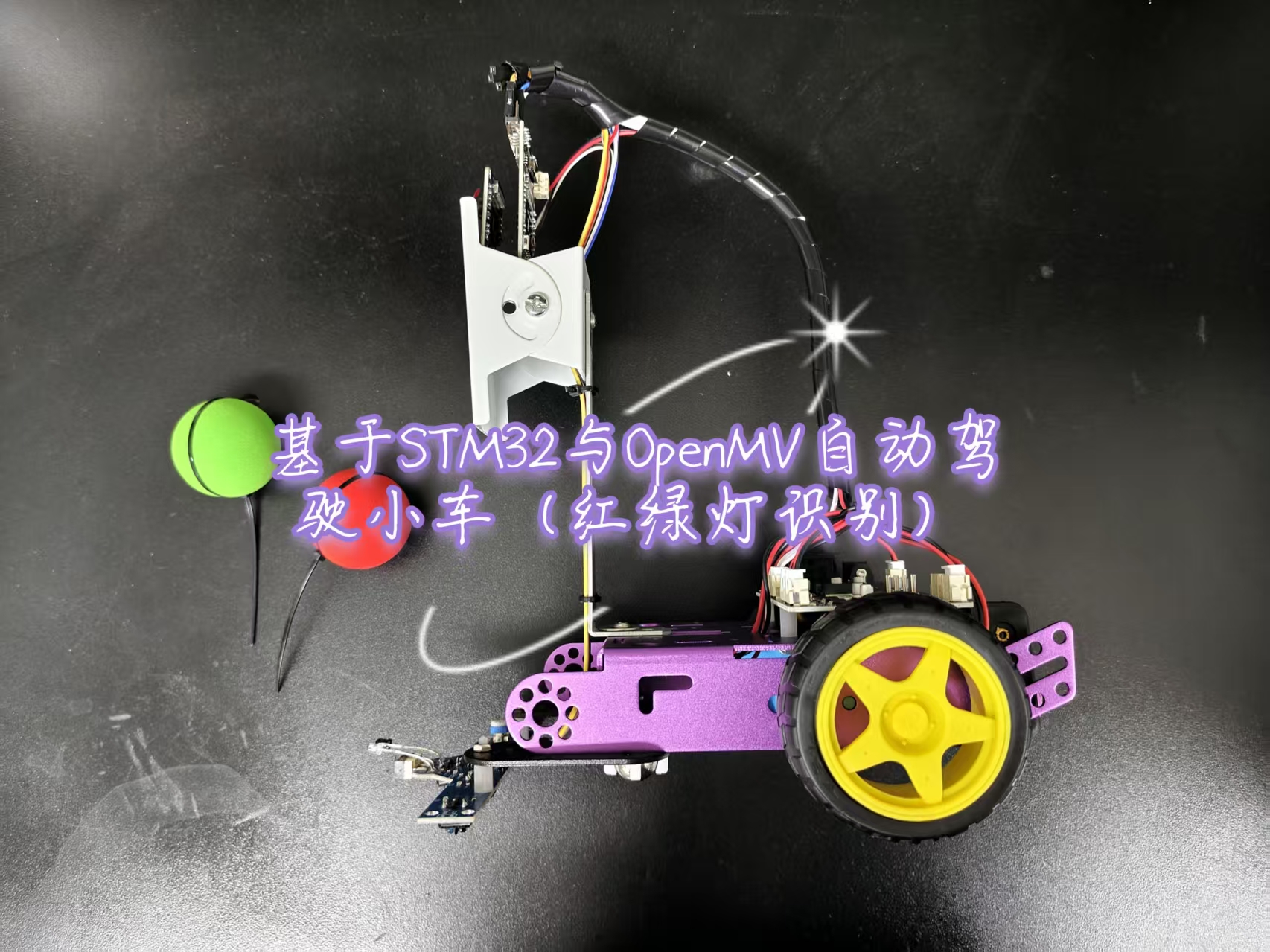
⭐ 基于 STM32 的智能自动驾驶小车 —— 红绿灯识别与巡线系统全解析
视频链接
【⭐基于STM32自动驾驶小车(红绿灯识别)】https://www.bilibili.com/video/BV16ByJBPEip?vd_source=9bc1ab89d6e2c73bc7a852726ea46376
随着嵌入式技术与机器视觉的发展,基于 STM32 的智能驾驶小车项目逐渐成为学习自动驾驶算法、嵌入式开发与图像识别的热门入门项目。本项目以 OpenMV 视觉识别 + 灰度巡线 + 红外避障 为核心,通过软硬件协作实现了一个具备基础自动驾驶能力的智能模型车。
🚗 项目亮点与使用场景
本项目完整提供:
-
原理图
-
完整源码
-
流程图 + 器件清单
-
演示视频
-
可定制实物小车
适合作为电子工程课程设计、竞赛作品、毕业设计或个人项目提升。
⭐ 功能简介
✨ 1. 灰度传感器巡线
小车前端搭载 3/5 路灰度传感器,通过检测路面黑白差异,配合 PID 控制算法,实现稳定的路径跟随能力,适用于赛道巡线、物流运输等场景。
✨ 2. 红外避障功能
前端部署红外传感器,可实时检测前方障碍物。一旦识别到障碍,车辆自动减速或停止,有效提升运行安全性。
✨ 3. OpenMV 红绿灯识别
利用 OpenMV 的机器视觉功能实现交通灯识别:
-
🔴 红灯识别 → 自动停车
-
🟢 绿灯或无灯光 → 正常行驶
这一功能模拟真实道路场景,让模型车具备初步的交通规则感知能力。
✨ 4. 功能可扩展
预留丰富接口,可拓展多种功能,包括:
-
📱 蓝牙遥控
-
📡 图传
-
🖥️ LCD 显示
-
🎤 语音播报
-
……
适合继续深度开发、项目升级或创新设计。
⭐ 项目支持与服务
-
提供全套资料与调试软件
-
支持实物定制与技术指导
-
可根据需求扩展更多智能驾驶功能
-
长期技术支持,适合初学者与工程应用
⭐ 联系与合作
欢迎咨询项目细节、源码、课程设计、实物定制等服务!
关注我们,获取更多嵌入式开发与机器视觉项目资料。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 10
10 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)