初探PROFINET V90PN控制——基于博图原创程序的封装块实践
总的来说,这个博图原创的封装块在PROFINET V90PN控制中表现出了强大的功能和灵活性。通过合理配置输入输出信号,可以实现多种复杂的控制逻辑,而无需深入研究FB284的细节。这对于刚接触V90PN的工程师来说,无疑是一个很好的起点。在配置速度参数时,需要根据实际设备的性能进行调整,避免过冲或速度突变。对于极限开关的处理,最好多加一层保护逻辑,防止意外情况的发生。总之,希望这篇分享能为大家在使
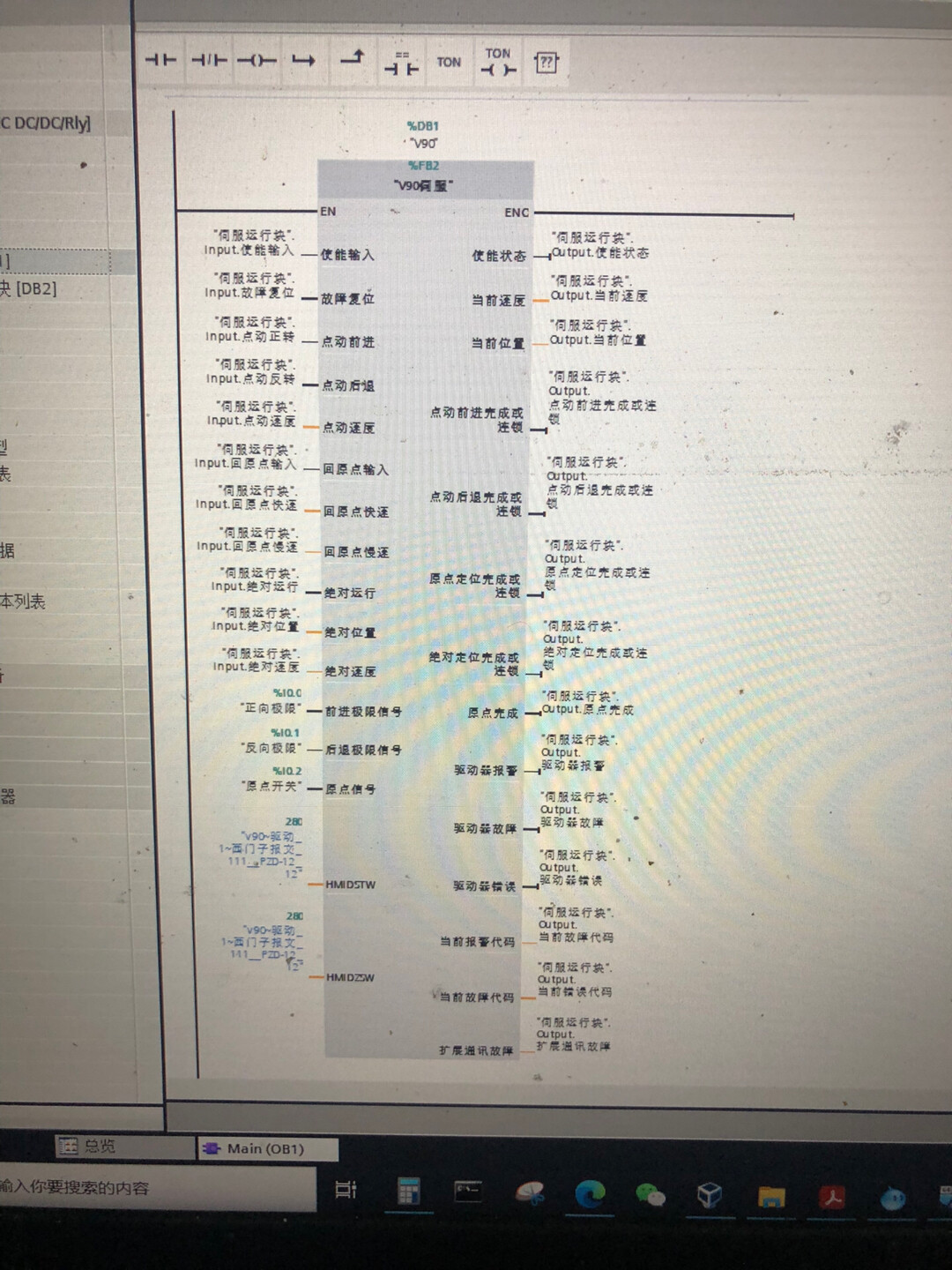
博图原创程序,PROFINET V90PN程序打包块,直接调用,库里面包含FB284,并实现以下功能: 输入信号如下: 1:使能输入和故障复位。 2:点动正转和反转(速度可调) 3:回原点模式,参考图五传感器安装位置, 前极限?原点?后极限。 开始(高速)后退-原点感应或后极限感应-(慢速)前进-离开原点瞬间停止并清零当前位置(原点确认)。 4:绝对运行,必须回原点完成才能执行此模式(速度可调)。 5:上述三种模式有4种速度可设定。 点动速度?原点快速?原点慢速?绝对速度。 6:极限开关信号输入。 7:报文输入。 信号输出如下: 1:使能状态和故障错误信息。 2:当前速度和当前位置 3:连锁信号输出如下: 1: 点动前进中,不可执行其他模式。 2:点动后退中,不可执行其他模式。 3:原点定位中,不可执行其他模式。 4:绝对定位中,不可执行其他模式。 4:原点完成信号输出。 通过此封装块,可以不用研究FB284,直接调用我这个块,控制V90PN。
最近在工作中接触到了一个挺有意思的项目,涉及到西门子的V90PN变频器控制。说实话,刚开始看到FB284这个功能块的时候,我还真有点懵,毕竟它可是个“重量级选手”,配置起来需要考虑的东西实在太多了。不过幸好,这次用的是一个博图原创的封装块,直接调用就能实现大部分功能,省去了不少研究FB284的麻烦。
输入信号:从基础功能到灵活控制
首先,我们来看输入信号部分。这个封装块设计得挺贴心的,把常见的功能都整合进去了,比如使能输入、故障复位、点动控制、回原点等等,具体功能如下:
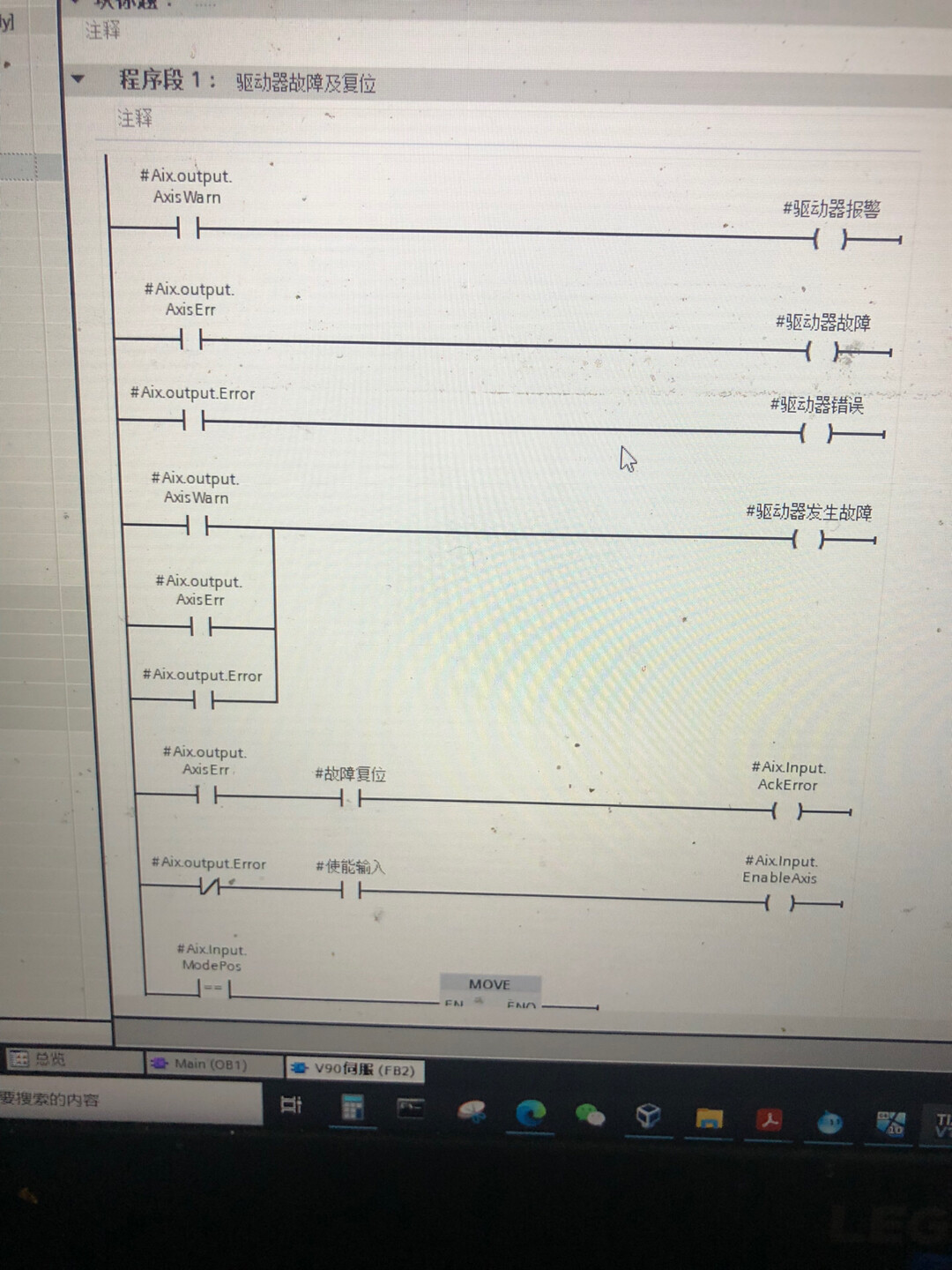
- 使能输入和故障复位
这是最基础的功能,通过一个使能信号开启整个控制逻辑。当设备出现故障时,复位信号可以清除故障状态,让系统重新开始。
- 点动正转和反转(速度可调)
点动控制应该是所有驱动器控制中使用最频繁的模式之一。这个封装块支持正反转,并且速度可以调节,非常方便。速度调节的部分可以配置不同的点动速度,具体参数可以根据实际情况设置。
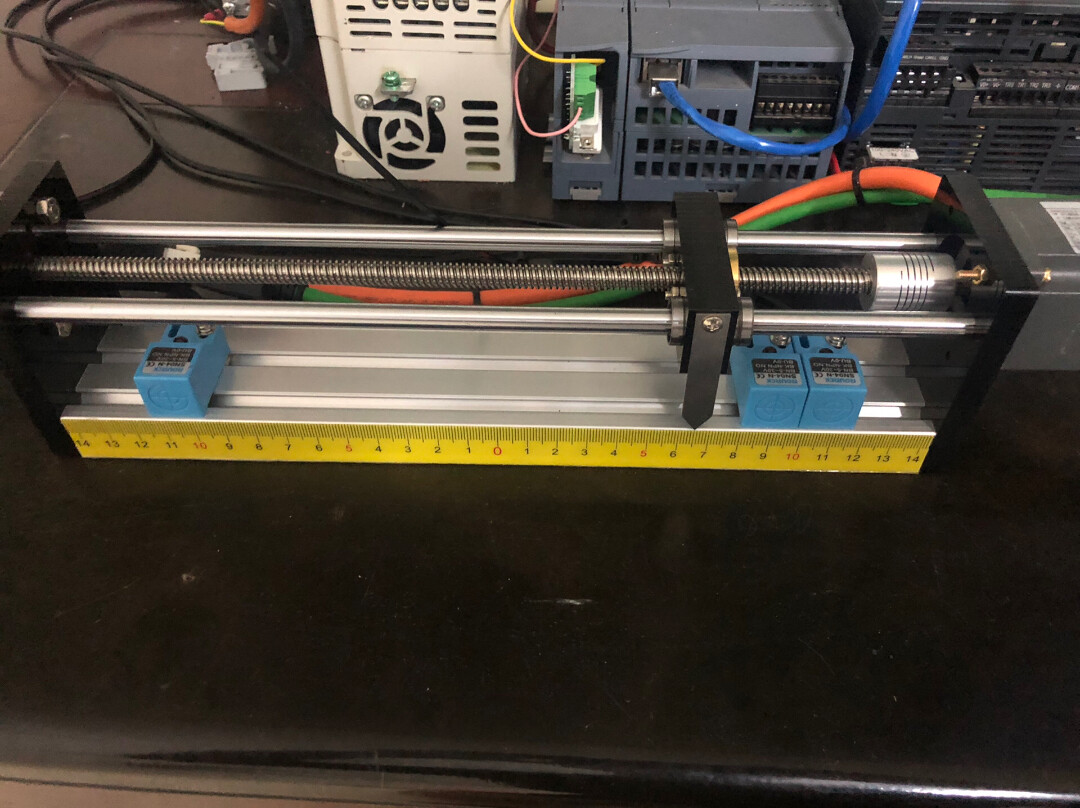
- 回原点模式
回原点模式是这个封装块的一大亮点。根据参考图五的传感器安装位置,系统会自动处理原点定位的过程,具体逻辑如下:
- 高速后退:从当前位置开始后退,直到检测到原点或后极限。
- 慢速前进:一旦检测到原点或后极限,驱动器会以慢速前进,直到离开原点。
- 清零并停止:在离开原点的瞬间,系统会清零当前位置并停止。
这个逻辑写起来确实有点复杂,但用代码表示就清晰多了:
`plaintext
// 回原点模式逻辑
IF 到达后极限 OR 到达原点 THEN
状态 := 慢速前进状态
ELSEIF 状态 = 高速后退状态 THEN
点动反转
ELSEIF 状态 = 慢速前进状态 THEN
点动正转
END_IF
`
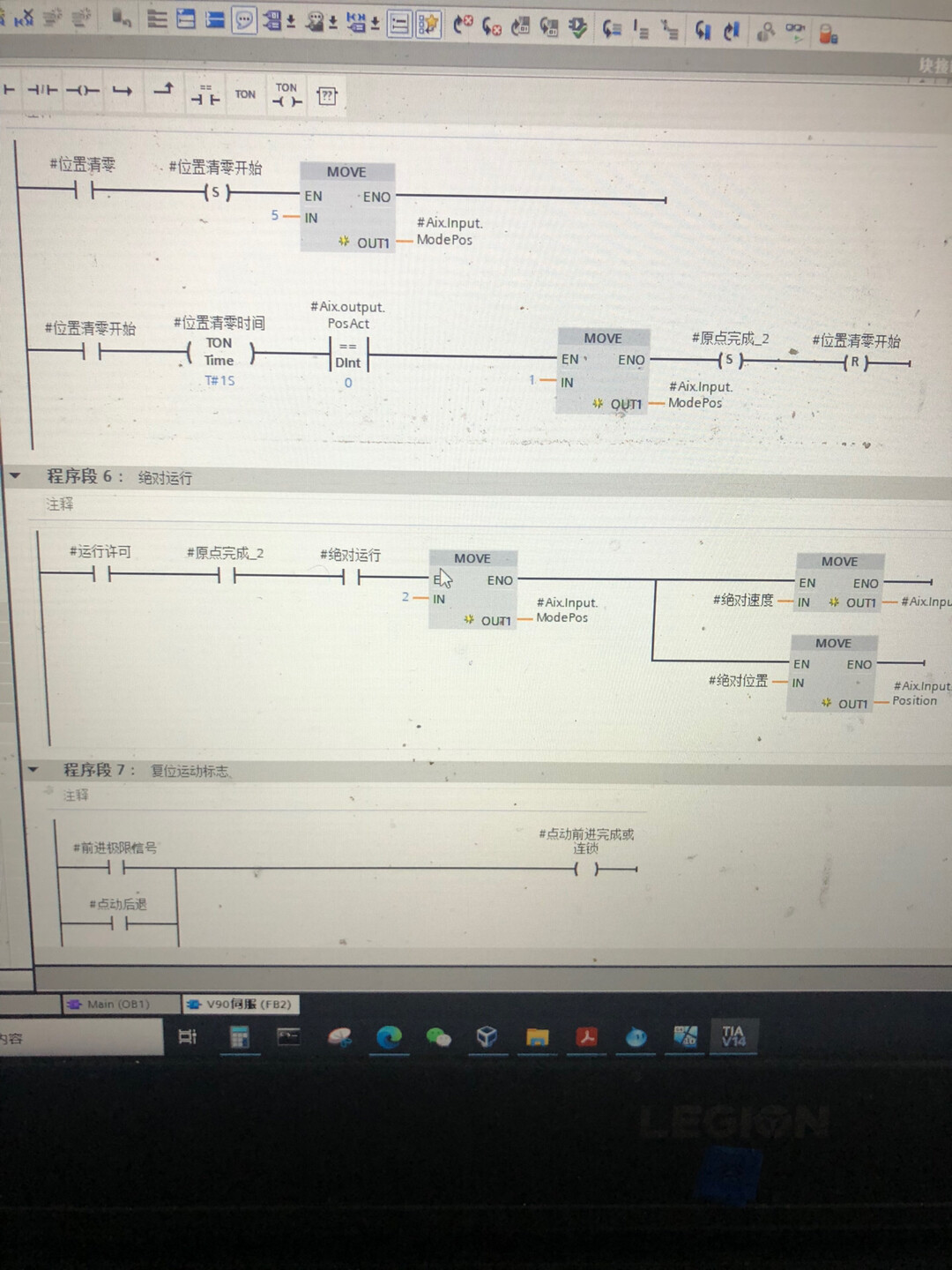
- 绝对运行模式
绝对运行模式的前提是先完成回原点过程。这个模式支持位置控制,速度同样可以调节。需要注意的是,在绝对运行模式下,所有操作都需要在原点已经确定的情况下进行,否则系统会报错。
`plaintext
// 绝对运行模式速度调节
IF 原点完成信号 THEN

驱动器速度 := 绝对速度参数
驱动器目标位置 := 绝对目标位置参数
ELSE
驱动器停止
博图原创程序,PROFINET V90PN程序打包块,直接调用,库里面包含FB284,并实现以下功能: 输入信号如下: 1:使能输入和故障复位。 2:点动正转和反转(速度可调) 3:回原点模式,参考图五传感器安装位置, 前极限?原点?后极限。 开始(高速)后退-原点感应或后极限感应-(慢速)前进-离开原点瞬间停止并清零当前位置(原点确认)。 4:绝对运行,必须回原点完成才能执行此模式(速度可调)。 5:上述三种模式有4种速度可设定。 点动速度?原点快速?原点慢速?绝对速度。 6:极限开关信号输入。 7:报文输入。 信号输出如下: 1:使能状态和故障错误信息。 2:当前速度和当前位置 3:连锁信号输出如下: 1: 点动前进中,不可执行其他模式。 2:点动后退中,不可执行其他模式。 3:原点定位中,不可执行其他模式。 4:绝对定位中,不可执行其他模式。 4:原点完成信号输出。 通过此封装块,可以不用研究FB284,直接调用我这个块,控制V90PN。
系统报错
END_IF
`
- 速度调节与极限开关
封装块支持4种速度设定:点动速度、原点快速速度、原点慢速速度和绝对速度。这些速度参数可以通过输入信号灵活调节,适用性很强。此外,极限开关信号也能直接输入,系统会根据极限位置自动调整状态。
输出信号:实时反馈与控制连锁
输出信号部分同样设计得非常实用,主要包括:
- 使能状态和故障信息
通过使能状态信号,可以实时监控系统是否启用。同时,故障信息输出会显示具体的错误类型,方便快速排查问题。
- 当前速度与位置
这个功能对于调试和监控非常重要。通过实时输出当前速度和位置,可以快速判断系统是否正常运行。
- 连锁信号输出
连锁信号的作用是防止不同模式之间的冲突。比如:
- 如果当前处于点动前进中,系统会禁止其他模式的执行。
- 同样,原点定位中也会禁止其他操作。
这部分逻辑在代码中可以通过简单的状态判断实现:
`plaintext
// 连锁信号判断
IF 点动前进模式 THEN
禁止其他模式信号 := TRUE
ELSEIF 点动后退模式 THEN
禁止其他模式信号 := TRUE
ELSEIF 原点定位模式 THEN
禁止其他模式信号 := TRUE
ELSEIF 绝对运行模式 THEN
禁止其他模式信号 := TRUE
END_IF
`
- 原点完成信号
原点完成信号在系统中起到了关键作用。只有当原点完成时,才能执行绝对运行模式或其他依赖原点位置的操作。
封装块的优势与实际应用
不得不说,这个封装块的设计确实让人眼前一亮。它不仅简化了FB284的配置过程,还提供了丰富的功能和灵活的接口。使用起来几乎不需要深入了解FB284的内部逻辑,只需要按照输入输出信号的定义进行配置即可。这对于需要快速开发和部署的项目来说,简直是福音。
在实际应用中,这个封装块可以极大地提高开发效率。比如,在调试阶段,通过实时输出的速度和位置信号,可以快速定位问题;而在运行阶段,连锁信号和故障信息又能保证系统的安全性,防止误操作。
总结与建议
总的来说,这个博图原创的封装块在PROFINET V90PN控制中表现出了强大的功能和灵活性。通过合理配置输入输出信号,可以实现多种复杂的控制逻辑,而无需深入研究FB284的细节。这对于刚接触V90PN的工程师来说,无疑是一个很好的起点。
不过,使用过程中也有一些需要注意的地方:
- 在配置速度参数时,需要根据实际设备的性能进行调整,避免过冲或速度突变。
- 对于极限开关的处理,最好多加一层保护逻辑,防止意外情况的发生。
总之,希望这篇分享能为大家在使用V90PN时提供一些参考。如果有兴趣的话,不妨亲自尝试一下这个封装块,相信它的强大功能不会让你失望的!

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)