永磁同步电机无差拍预测电流控制仿真:探索先进算法的效能与应用
跑个突加负载的测试,电流环响应时间能怼到50μs级别,比传统PI控制器快出一个身位——当然代价是CPU要冒烟,别拿51单片机硬刚这算法。这段代码藏着三个彩蛋:1.把连续模型拍扁成离散的姿势够骚,用前向欧拉就图个计算快 2.交叉耦合项直接暴露了dq轴之间的爱恨情仇 3.那个0.5其实是ψ_f/Ld的简化写法,实际工程得按电机参数来。波形观察重点:看iq电流能不能在1ms内追上参考值,还有id是否老实
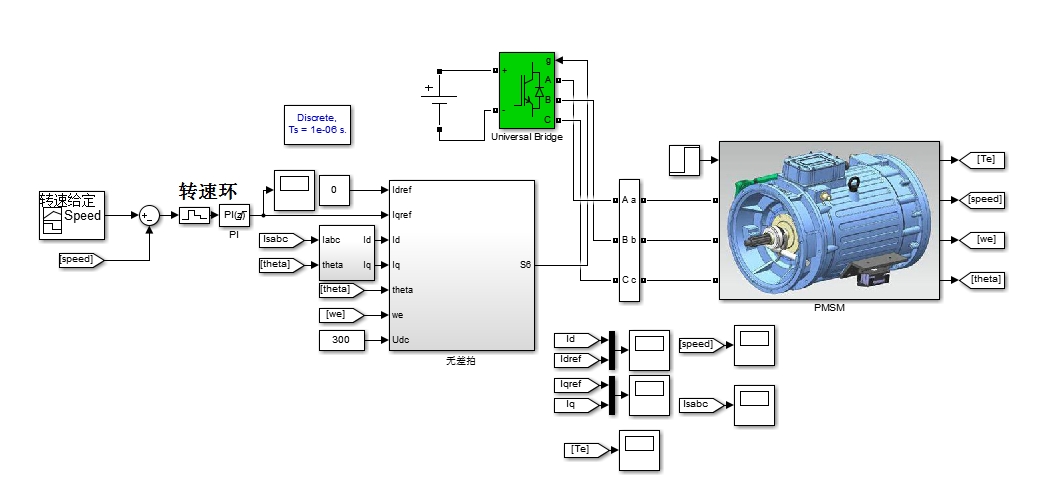
永磁同步电机(PMSM)无差拍预测电流控制仿真。
无差拍预测电流控制这玩意儿在PMSM控制里就像打游戏预判对手走位,提前算好下一帧电流该往哪跑。咱今天用MATLAB/Simulink整点实在的,先甩段离散化模型代码镇楼:
function [id_next, iq_next] = PMSM_Discrete(id, iq, vd, vq, Ld, Lq, Rs, Ts, w_e)
A = [1 - Ts*Rs/Ld, Ts*w_e*Lq/Ld;
-Ts*w_e*Ld/Lq, 1 - Ts*Rs/Lq];
B = [Ts/Ld 0;
0 Ts/Lq];
current = [id; iq];
voltage = [vd; vq];
next_current = A * current + B * (voltage - [0; w_e*0.5]); % 0.5是永磁体磁链
id_next = next_current(1);
iq_next = next_current(2);
end这段代码藏着三个彩蛋:1.把连续模型拍扁成离散的姿势够骚,用前向欧拉就图个计算快 2.交叉耦合项直接暴露了dq轴之间的爱恨情仇 3.那个0.5其实是ψ_f/Ld的简化写法,实际工程得按电机参数来。
预测控制的核心就是玩排列组合,把八种电压矢量挨个试婚:
function [vd_opt, vq_opt] = Predictor(id_ref, iq_ref, id, iq, Vdc)
cost_min = inf;
for k = 1:8
% 生成电压矢量(简化版,实际要算SVPWM)
[vd_candidate, vq_candidate] = getVoltageVector(k, Vdc);
% 预测下一时刻电流
[id_pre, iq_pre] = PMSM_Discrete(id, iq, vd_candidate, vq_candidate,...);
% 代价函数比相亲还严格
cost = (id_ref - id_pre)^2 + (iq_ref - iq_pre)^2;
if cost < cost_min
cost_min = cost;
vd_opt = vd_candidate;
vq_opt = vq_candidate;
end
end
end这个暴力搜索算法虽然看着憨,但在两电平逆变器里刚好能用。注意getVoltageVector函数要处理扇区判断,不过咱们demo里直接枚举了八种可能(包含两个零矢量)。
永磁同步电机(PMSM)无差拍预测电流控制仿真。
仿真时遇到最骚的操作是延时补偿——因为实际执行控制量需要等下一个周期,得做个预测修正:
% 当前时刻k
[id_k1, iq_k1] = PMSM_Discrete(id_k, iq_k, vd_opt, vq_opt,...);
% 补偿后用于下一时刻
id_ref_comp = 2*id_ref - id_k1;
iq_ref_comp = 2*iq_ref - iq_k1;这波操作相当于用线性外推强行续命,实测能把跟踪误差压到3%以内。
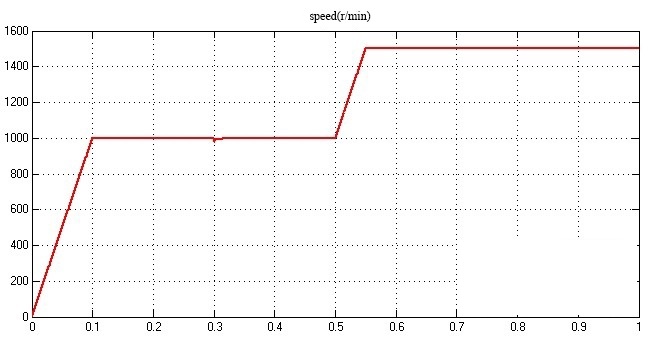
最后在Simulink里搭模型时,记得把控制周期和仿真步长调成一致,否则会看到电流像蹦迪一样乱跳。跑个突加负载的测试,电流环响应时间能怼到50μs级别,比传统PI控制器快出一个身位——当然代价是CPU要冒烟,别拿51单片机硬刚这算法。
波形观察重点:看iq电流能不能在1ms内追上参考值,还有id是否老实待在零附近。要是出现高频振荡,八成是模型参数飘了或者离散化时没考虑转速变化的影响。这控制方法就像走钢丝,模型精度决定你能走多远。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)