STM32CubeMX配置串口采集超声波传感器数据(四)
目的:我手上有STM32F407ZET6开发板和HC-SR04的超声波模块,串口线,电脑。现在超声波的Trig接PB6、 Echo接PE6。超声波测得距离通过串口一在电脑端串口调试助手上显示出来,用hal库和cubemx来实现。
第一步:STM32CubeMX配置(图形化生成基础代码)
这是整个开发的基础,按照你的引脚定义来配置。
-
新建工程与芯片选择:打开CubeMX,新建工程,搜索并选择你的芯片 STM32F407ZET6。
-
配置时钟源 (RCC):
-
在
System Core -> RCC中,将High Speed Clock (HSE)设置为Crystal/Ceramic Resonator。这是为了使用你开发板上的外部晶振,以获得精确的时钟。
-
-
配置时钟树 (Clock Configuration):
-
在
Clock Configuration标签页,将HCLK设置为 168 MHz(这是STM32F407的最高主频)。CubeMX会自动计算分频系数,确保配置无误即可。
-
-
配置串口1 (USART1):
-
在
Connectivity -> USART1中,将Mode设置为Asynchronous(异步通信)。 -
在下方
Parameter Settings中,通常保持默认的 9600 Bits/s、8位数据、无校验、1位停止位。你电脑端的串口助手需要和这个设置保持一致。 -
此时,CubeMX会自动将USART1的TX和RX引脚分配到开发板上对应的引脚(通常是PA9和PA10)。
-
-
配置超声波Trig引脚 (PB6):
-
在
Pinout视图或System Core -> GPIO中,找到PB6引脚。 -
将其设置为
GPIO_Output模式。这个引脚将用于给超声波模块发送触发信号。
-
-
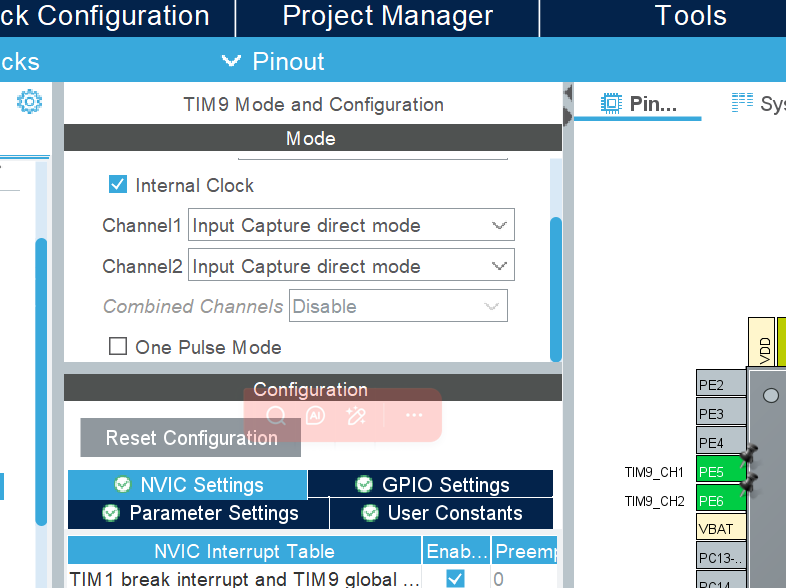
配置超声波Echo引脚 (PE6)(核心!):
-
Echo引脚需要测量高电平脉冲宽度,这是通过定时器的输入捕获功能实现的。我们选择任意一个空闲定时器,配置如下:TIM9
-
在
Timers -> TIM9中,将Channel1设置为Input Capture direct mode。 在Timers -> TIM9中,将Channel2设置为Input Capture direct mode。 -
在
Parameter Settings中,进行最关键的三步配置:-
预分频器 (Prescaler):我们希望定时器每计数一次代表1微秒。系统时钟是168MHz,APB2定时器时钟通常也是168MHz。所以预分频器值需要设置为
168-1 = 167,这样定时器计数频率就变成了168MHz / 168 = 1MHz,即每1微秒计数器加1。 -
计数器周期 (Counter Period):设置为最大值
65535。这决定了我们最大能测量的时间,在1MHz计数频率下,约为65.5毫秒,足够覆盖HC-SR04的有效量程。 -
触发极性 (Polarity Selection):先保持默认的
Rising Edge(上升沿触发),我们会在代码中动态切换它。
-
-
在
NVIC Settings中,务必勾选TIM9 global interrupt的中断使能,否则捕获不到信号。
-
-
生成代码:
-
在
Project Manager中,设置好工程名、路径和IDE(MDK-ARM)。 -
点击
GENERATE CODE,生成初始工程。
-
💻 第二步:编写应用程序代码(在Keil中实现逻辑)
生成代码后,用Keil打开工程,我们需要添加自己的逻辑。
-
添加printf支持(方便调试):
-
在
usart.c文件的/* USER CODE BEGIN 0 */和/* USER CODE END 0 */之间,添加fputc函数的重定向代码:c
/* USER CODE BEGIN 0 */ #include <stdio.h> int fputc(int ch, FILE *f) { HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF); return ch; } /* USER CODE END 0 */ -
别忘了在
usart.h中包含头文件#include <stdio.h>。
-
-
编写超声波驱动逻辑:
在main.c文件的/* USER CODE BEGIN 0 */区域,添加以下全局变量和函数定义:c
/* USER CODE BEGIN 0 */ // 用于存储捕获时间和状态的全局变量 static uint32_t ic_rising_tick = 0; static uint32_t ic_falling_tick = 0; static uint8_t ic_capture_complete = 0; static uint8_t ic_capture_state = 0; // 0: 等待上升沿, 1: 等待下降沿 // 微秒级延时函数 (使用SysTick实现) void delay_us(uint32_t us) { uint32_t tick = HAL_GetTick(); uint32_t wait_tick = us / 1000; // 粗略转换,如果需要精确us延时,建议使用定时器 while((HAL_GetTick() - tick) < wait_tick); } // 发送Trig触发信号 void HCSR04_Trigger(void) { HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET); delay_us(20); // 触发脉冲 >10us HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET); } // 定时器输入捕获中断回调函数 (由HAL库自动调用) void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) { if (htim->Instance == TIM9) { if (ic_capture_state == 0) // 捕获到上升沿 { ic_rising_tick = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1); // 将捕获极性改为下降沿,准备捕获脉冲结束 __HAL_TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_FALLING); ic_capture_state = 1; } else if (ic_capture_state == 1) // 捕获到下降沿 { ic_falling_tick = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1); // 将捕获极性改回上升沿,以备下次触发 __HAL_TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING); ic_capture_state = 0; ic_capture_complete = 1; // 标记一次测量完成 } } } /* USER CODE END 0 */ -
在主函数中实现测距循环:
在main函数的/* USER CODE BEGIN 2 */和/* USER CODE BEGIN WHILE */部分添加代码:c
int main(void) { HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_USART1_UART_Init(); MX_TIM9_Init(); /* USER CODE BEGIN 2 */ printf("HC-SR04 Ultrasonic Ranging Test Started...\r\n"); // 启动定时器的输入捕获中断 HAL_TIM_IC_Start_IT(&htim9, TIM_CHANNEL_1); /* USER CODE END 2 */ while (1) { /* USER CODE BEGIN WHILE */ // 1. 发送触发信号 HCSR04_Trigger(); // 2. 等待捕获完成,设置超时防止死锁 (5ms超时) uint32_t timeout = HAL_GetTick(); while (ic_capture_complete == 0) { if ((HAL_GetTick() - timeout) > 5) { break; // 超时,跳出等待 } } // 3. 如果捕获完成,计算并打印距离 if (ic_capture_complete) { // 计算高电平持续时间,单位微秒 (因为定时器配置为1MHz) uint32_t pulse_width_us = 0; if (ic_falling_tick >= ic_rising_tick) { pulse_width_us = ic_falling_tick - ic_rising_tick; } else { // 处理定时器溢出情况(如果测量距离很长,这里需要更复杂的逻辑) // 本例中,F407的主频和计数器周期足以覆盖近距离,暂不处理溢出。 pulse_width_us = ic_falling_tick + (65535 - ic_rising_tick); } // 计算距离,公式:距离(cm) = 脉冲时间(us) * 0.034 / 2 float distance = pulse_width_us * 0.017; // 0.017 = 340m/s / 2 / 1000000 * 100 printf("Distance: %.2f cm\r\n", distance); // 清除完成标志,准备下一次测量 ic_capture_complete = 0; } else { printf("Measurement timeout.\r\n"); ic_capture_complete = 0; // 清除标志,准备下次 ic_capture_state = 0; // 重置状态机 // 确保捕获极性是上升沿 __HAL_TIM_SET_CAPTUREPOLARITY(&htim9, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING); } HAL_Delay(200); // 两次测量间隔建议大于60ms[citation:2][citation:6] /* USER CODE END WHILE */ } }
⚠️ 第三步:接线与测试
-
硬件接线:
-
HC-SR04的
VCC接开发板的 3V3。 -
HC-SR04的
GND接开发板的 GND。 -
HC-SR04的
Trig接开发板的 PB6。 -
HC-SR04的
Echo接开发板的 PE6。 -
特别注意:HC-SR04是5V逻辑,而STM32是3.3V逻辑。虽然STM32的IO口通常容忍5V,但最稳妥的做法是在Echo引脚上加一个电阻分压(例如1k和2k电阻)将5V降到3.3V左右。
-
-
编译下载:编译代码,下载到开发板。
-
打开串口助手:设置波特率为9600,打开对应串口。你应该能看到不断打印出的距离数据
四、总结问题
图片1:串口一直打印"Measurement timeout."
text
Measurement timeout. Measurement timeout. Measurement timeout. ...
当时诊断:程序在跑,但Echo没信号,怀疑硬件或配置问题。
图片2:TIM9 Prescaler: 0
text
TIM9 Prescaler: 0 TIM9 Period: 65535
当时诊断:预分频器没生效!计数频率168MHz(太快),计数器很快溢出,导致捕获失败。
解决:在tim.c里手动加htim9.Instance->PSC = 167;,Prescaler终于变成167。
图片3:Echo一直打印0
text
Echo: 0 Echo: 0 Echo: 0 ...
当时诊断:硬件信号没到PE6?但标准库代码能工作,证明硬件没问题 → 问题锁定在HAL库配置。
图片4:TIM9_CH1配置截图(第一次检查引脚)
text
TIM9_CH1 PE6 ...
当时判断:引脚配置正确,继续排查中断。
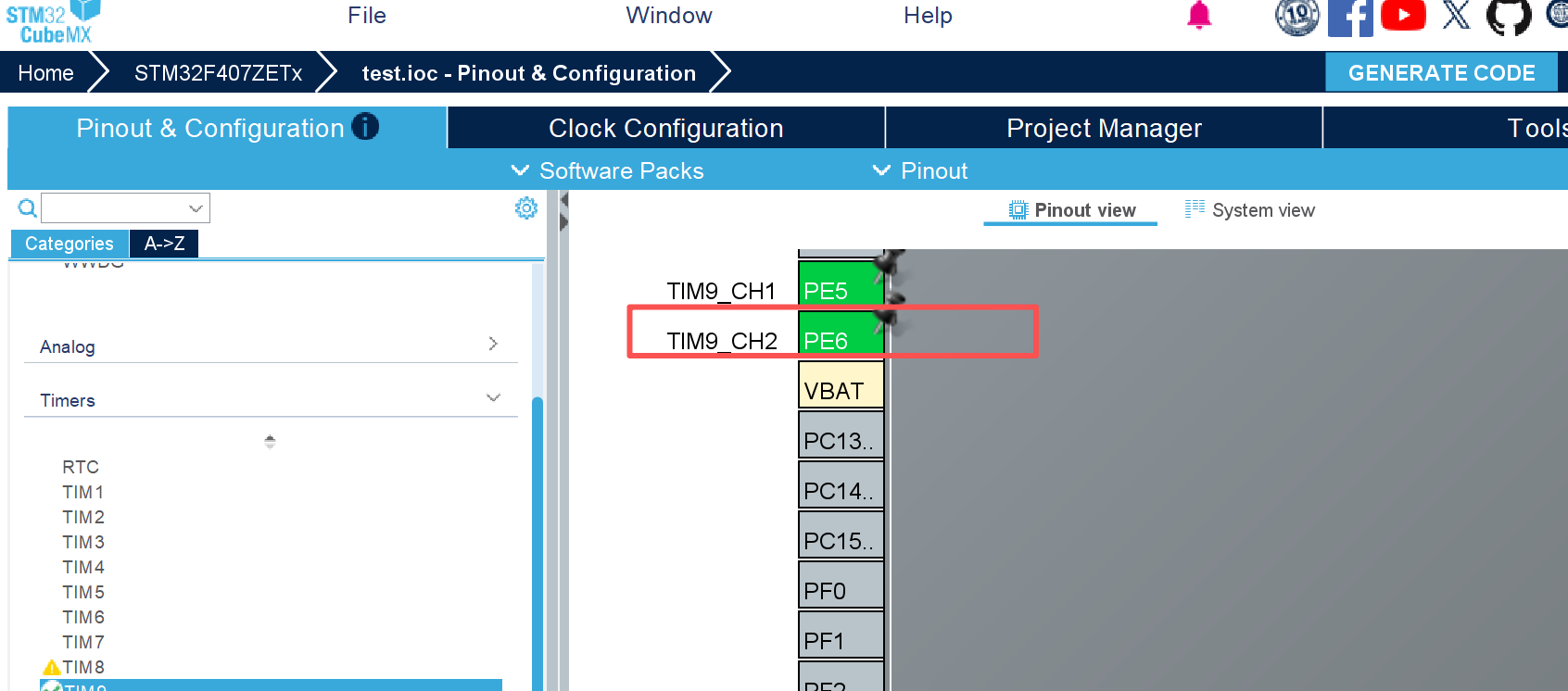
图片5:关键转折点——TIM9_CH2配置截图
text
TIM9_CH2 PE6 ...
真相大白:原来PE6配的是 TIM9_CH2,但代码里一直用 TIM9_CH1!
🎯 最终原因总结
| 问题层面 | 具体原因 | 发现时间 |
|---|---|---|
| 预分频器 | CubeMX生成的代码里Prescaler=0,导致计数频率168MHz(太快) | 图片2 |
| 引脚配置 | PE6实际配成 TIM9_CH2,但代码里用的是 TIM9_CH1 | 图片5(关键!) |
一句话总结:硬件信号进了CH2的门,软件却在CH1门口等,加上预分频器没生效,双重bug导致中断方式一直失败。
✅ 解决方案
改代码(最快):把代码里所有 TIM_CHANNEL_1 改成 TIM_CHANNEL_2
改CubeMX配置:把PE6从CH2改成CH1,重新生成代码

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 16
16 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)