PIC单片机高阶实战(二):PIC32MX多串口通信及不同波特率转换
其丰富的外设与六串口设计,非常适合构建多通道通信与控制系统。本次我将以一款实际投产数年的核心控制板为例,控制板。单片机感兴趣想学习的朋友可以关注我,免费赠送资料(包括原理图、数据手册、各种例程等)。,逐步深入至更集成、功能更丰富的型号。,详解其六串口架构与不同波特率灵活配置的实现方法。后续干货不断,咱们一起在单片机的世界里,共同进步。系列单片机不一样,一般其他系列单片机某一。屏、各种传感器、或与其
作为一名使用PIC单片机近三十年的工程师,我最早从PIC16F87X系列起步,逐步深入至更集成、功能更丰富的型号。在智慧农业、工业控制等实际项目中,PIC32MX是我频繁使用的核心芯片。其丰富的外设与六串口设计,非常适合构建多通道通信与控制系统。本次我将以一款实际投产数年的核心控制板为例,控制板MCU型号为PIC32MX534F064H,详解其六串口架构与不同波特率灵活配置的实现方法。
该控制板集成了以下6大功能:
1、2路RS485数据收发(可接LED屏、各种传感器、或与其他控制板通信);
2、1路UART-TTL(可接摄像头等);
3、1路4G模块数据收发(移远或中移4G模块);
4、1路LORA无线数据收发或RS485数据收发;
5、2路无源开关量输入;
6、太阳能供电(带充电管理)或直流电源直接供电;
一、硬件设计:串口电路详解
PIC32MX534F064H具备六个独立UART模块,本设计中:
- UART1 可通过跳线切换为LORA无线或RS485有线通信,增强系统灵活性。
- UART2 通过电平转换电路连接4G模块,实现无线远程通信。
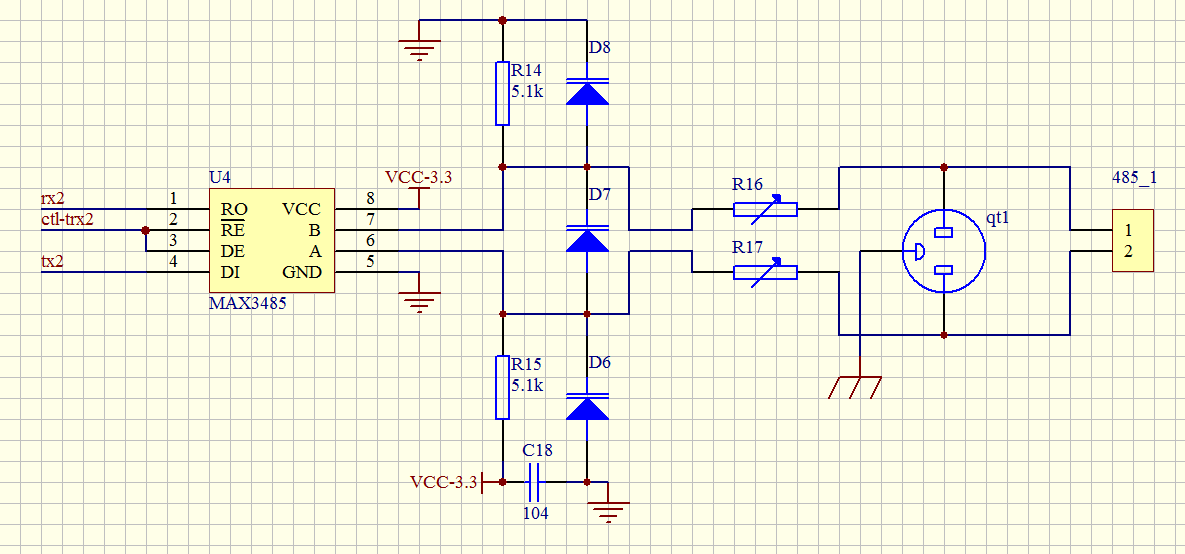
- UART3、UART6为RS485有线通信,可接LED屏、触摸屏、各种传感器等。
- UART4 为UART-TTL,可接摄像头等。
- UART5 在本控制板上没有使用。
UART1、UART2可以设置为中断接收数据,UART3- UART6只能是查询接收数据。
RS485接口电路
二、串口例程:
PIC单片机输入输出寄存器的控制字设置与其他如MSP430系列单片机不一样,一般其他系列单片机某一I/O口输出置1、输入置0;PIC则相反,输出置0、输入置1,你可以把0想成O(对应OUT),把1想成I(对应IN),这样会不容易设置错。
以下是串口示例(80M主频),串口1波特率9600,串口2波特率115200,串口3、4、6波特率都是9600,都是8N1格式,数据在不同串口间可透传,具体配置及程序如下:
#include<p32mx534f064h.h>
#pragma config FPLLMUL=MUL_20,FPLLIDIV=DIV_2,FPLLODIV=DIV_1,FWDTEN=OFF
#pragma config POSCMOD=HS,FNOSC=PRIPLL,FPBDIV=DIV_1
#define SYS_FREQ (80000000L)
unsigned char dres_485=1, flag_rev=0,flag_rev2=0,flag_rev3,flag_rev4,flag_rev5,flag_rev6;
unsigned int time_tnt,time_tnt2,time_tnt3,time_tnt4,time_tnt5,time_tnt6, ,rev_rnt=0,rev_rnt2=0,rev_rnt3,rev_rnt4,rev_rnt5,rev_rnt6,tran_rnt1=0,tran_rnt2=0,tran_rnt3,tran_rnt4,tran_rnt5,tran_rnt6;
unsigned char trans[200];
unsigned char reciv[200];
unsigned char trans2[200];
unsigned char reciv2[200];
unsigned char trans3[200];
unsigned char reciv3[200];
unsigned char trans4[200];
unsigned char reciv4[200];
unsigned char trans5[200];
unsigned char reciv5[200];
unsigned char trans6[200];
unsigned char reciv6[200];
void delay(unsigned int a)
{
int i,j;
for(i=0;i<a;i++)
for(j=0;j<100;j++)
;
}
void uart_send1(unsigned char dat) //串口1发送数据
{
U1STAbits.UTXEN=1;
U1TXREG=dat;
while(!U1STAbits.TRMT);
}
void uart_send2(unsigned char dat) //串口2发送数据
{
U2STAbits.UTXEN=1;
U2TXREG=dat;
while(!U2STAbits.TRMT);
}
void uart_send3(unsigned char dat)
{
U3STAbits.UTXEN=1;
U3TXREG=dat;
while(!U3STAbits.TRMT);
}
void uart_send4(unsigned char dat)
{
U4STAbits.UTXEN=1;
U4TXREG=dat;
while(!U4STAbits.TRMT);
}
void uart_send5(unsigned char dat)
{
U5STAbits.UTXEN=1;
U5TXREG=dat;
while(!U5STAbits.TRMT);
}
void uart_send6(unsigned char dat)
{
U6STAbits.UTXEN=1;
U6TXREG=dat;
while(!U6STAbits.TRMT);
}
void main() {
unsigned int i,j;
AD1PCFG=0XFFFF;
TRISB=0x0180;
PORTB=0x0000;
TRISC=0;
PORTC=0x0000;
TRISD=0x0204;
PORTD=0x0000;
TRISE=0x0000;
PORTE=0x0000;
TRISF=0x0010;
PORTF=0x0000;
TRISG=0x0280;
PORTG=0x0000;
DDPCON = 0x00 ; //关闭EJTAG口,
OSCCON&=0xfffd;
SYSTEMConfig(SYS_FREQ, SYS_CFG_WAIT_STATES | SYS_CFG_PCACHE);
ConfigIntTimer1(T1_INT_ON | T1_INT_PRIOR_5 | T1_INT_SUB_PRIOR_1);
INTConfigureSystem(INT_SYSTEM_CONFIG_MULT_VECTOR);
UARTSetLineControl(UART1, UART_DATA_SIZE_8_BITS | UART_PARITY_NONE | UART_STOP_BITS_1);
UARTConfigure(UART1, UART_ENABLE_HIGH_SPEED|UART_ENABLE_PINS_TX_RX_ONLY);
UARTSetDataRate(UART1, SYS_FREQ,9600);
UARTSetFifoMode(UART1, UART_INTERRUPT_ON_RX_NOT_EMPTY);
ConfigIntUART1(UART_RX_INT_EN | UART_INT_PR6 | UART_INT_SUB_PR2);
EnableIntU1RX;
UARTEnable(UART1, UART_ENABLE_FLAGS(UART_PERIPHERAL | UART_RX | UART_TX));
UARTSetLineControl(UART2, UART_DATA_SIZE_8_BITS | UART_PARITY_NONE | UART_STOP_BITS_1);
UARTConfigure(UART2, UART_ENABLE_HIGH_SPEED|UART_ENABLE_PINS_TX_RX_ONLY);
UARTSetDataRate(UART2, SYS_FREQ, 115200);
UARTSetFifoMode(UART2, UART_INTERRUPT_ON_RX_NOT_EMPTY);
ConfigIntUART2(UART_RX_INT_EN | UART_INT_PR6 | UART_INT_SUB_PR2);
EnableIntU2RX;
UARTEnable(UART2, UART_ENABLE_FLAGS(UART_PERIPHERAL | UART_RX | UART_TX));
UARTSetLineControl(UART3, UART_DATA_SIZE_8_BITS | UART_PARITY_NONE | UART_STOP_BITS_1);
UARTConfigure(UART3, UART_ENABLE_HIGH_SPEED|UART_ENABLE_PINS_TX_RX_ONLY);
UARTSetDataRate(UART3, SYS_FREQ, 9600);
UARTSetFifoMode(UART3, UART_INTERRUPT_ON_RX_NOT_EMPTY);
UARTEnable(UART3, UART_ENABLE_FLAGS(UART_PERIPHERAL | UART_RX | UART_TX));
UARTSetLineControl(UART4, UART_DATA_SIZE_8_BITS | UART_PARITY_NONE | UART_STOP_BITS_1);
UARTConfigure(UART4, UART_ENABLE_HIGH_SPEED|UART_ENABLE_PINS_TX_RX_ONLY);
UARTSetDataRate(UART4, SYS_FREQ, 9600);
UARTSetFifoMode(UART4, UART_INTERRUPT_ON_RX_NOT_EMPTY);
UARTEnable(UART4, UART_ENABLE_FLAGS(UART_PERIPHERAL | UART_RX | UART_TX));
UARTSetLineControl(UART5, UART_DATA_SIZE_8_BITS | UART_PARITY_NONE | UART_STOP_BITS_1);
UARTConfigure(UART5, UART_ENABLE_HIGH_SPEED|UART_ENABLE_PINS_TX_RX_ONLY);
UARTSetDataRate(UART5, SYS_FREQ, 115200);
UARTSetFifoMode(UART5, UART_INTERRUPT_ON_RX_NOT_EMPTY);
UARTEnable(UART5, UART_ENABLE_FLAGS(UART_PERIPHERAL | UART_RX | UART_TX));
UARTSetLineControl(UART6, UART_DATA_SIZE_8_BITS | UART_PARITY_NONE | UART_STOP_BITS_1);
UARTConfigure(UART6, UART_ENABLE_HIGH_SPEED|UART_ENABLE_PINS_TX_RX_ONLY);
UARTSetDataRate(UART6, SYS_FREQ, 9600);
UARTSetFifoMode(UART6, UART_INTERRUPT_ON_RX_NOT_EMPTY);
UARTEnable(UART6, UART_ENABLE_FLAGS(UART_PERIPHERAL | UART_RX | UART_TX));
//其他初始化
INTEnableInterrupts();
OpenTimer1(T1_ON | T1_PS_1_1 | T1_SOURCE_INT,4000); //分频设置为1
delay(10000);
while(1) {
if(U3STAbits.URXDA)
{
reciv3[rev_rnt3]=UARTGetDataByte(UART3);
rev_rnt3+=1;
time_tnt3=0;
flag_rev3=1;
}
if(U4STAbits.URXDA)
{
reciv4[rev_rnt4]=UARTGetDataByte(UART4);
rev_rnt4+=1;
time_tnt4=0;
flag_rev4=1;
}
if(U5STAbits.URXDA)
{
reciv5[rev_rnt5]=tmp3=UARTGetDataByte(UART5);
rev_rnt5+=1;
time_tnt5=0;
flag_rev5=1;
}
if(U6STAbits.URXDA)
{
reciv6[rev_rnt6]=UARTGetDataByte(UART6);
rev_rnt6+=1;
time_tnt6=0;
flag_rev6=1;
}
// 主循环,可加入其他任务
}
}
void __ISR(_UART1_VECTOR, IPL6SOFT) IntUart1Handler(void)
{
if (INTGetFlag(INT_SOURCE_UART_RX(UART1)))
{
reciv[rev_rnt]=UARTGetDataByte(UART1);
rev_rnt+=1;
time_tnt=0;
flag_rev=1;
}
INTClearFlag(INT_SOURCE_UART_RX(UART1));
}
void __ISR(_UART2_VECTOR, IPL6SOFT) IntUart2Handler(void)
{
if (INTGetFlag(INT_SOURCE_UART_RX(UART2)))
{
reciv2[rev_rnt2]=tmp2=UARTGetDataByte(UART2);
rev_rnt2+=1;
time_tnt2=0;
flag_rev2=1;
}
INTClearFlag(INT_SOURCE_UART_RX(UART2));
}
void __ISR(_TIMER_1_VECTOR, ipl5) _Timer1Handler(void)
{
// DisableIntT1;
if(flag_rev==1)
{
time_tnt+=1; //1570约为06ms
}
if(flag_rev2==1)
{
time_tnt2+=1; //1570约为06ms
}
if(flag_rev3==1)
{
time_tnt3+=1; //1570约为06ms
}
if(flag_rev4==1)
{
time_tnt4+=1; //1570约为06ms
}
if(flag_rev5==1)
{
time_tnt5+=1; //1570约为06ms
}
if(flag_rev6==1)
{
time_tnt6+=1; //1570约为06ms
}
INTClearFlag(INT_T1);//中断标志清零
// EnableIntT1;
}三、本系列文章规划
本文是《PIC单片机高阶实战》系列的第一篇,后续将逐步展开以下内容:
|
序号 |
主题 |
内容概要 |
|
1 |
振荡器与定时器 |
时钟配置与定时中断 |
|
2 |
UART通信 |
串口配置、波特率转换、数据透传 |
|
3 |
I/O按键输入 |
电平变化中断 |
|
4 |
4G模块数据收发 |
AT指令控制、4G模块数据透传 |
|
5 |
数据存储 |
数据存储与读取 |
《PIC单片机入门实战》共8篇文章与《PIC单片机进阶实战》共6篇文章与《PIC单片机高阶实战》5篇内容来源于我自己画的电路原理图及程序,有对PIC单片机感兴趣想学习的朋友可以关注我,免费赠送资料(包括原理图、数据手册、各种例程等)。
有需要这款开发板的朋友也可以关注联系我。
后续干货不断,咱们一起在单片机的世界里,共同进步。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 15
15 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)