CANopen-402协议深度解析:工业运动控制的通用语言
CANopen是基于CAN(Controller Area Network)总线的高层通信协议,由CiA(CAN in Automation)组织制定。它将简单的CAN帧封装成结构化的通信对象,使不同厂商的设备能够无缝互操作。核心优势:标准化:统一的设备描述文件(EDS/DCF)实时性:PDO传输延迟可控制在亚毫秒级灵活性:支持1-127个节点,即插即用可靠性:内置心跳监控、紧急报文等故障机制。
目录
1. 协议架构与核心概念
1.1 什么是CANopen?
CANopen是基于CAN(Controller Area Network)总线的高层通信协议,由CiA(CAN in Automation)组织制定。它将简单的CAN帧封装成结构化的通信对象,使不同厂商的设备能够无缝互操作。
核心优势:
-
标准化:统一的设备描述文件(EDS/DCF)
-
实时性:PDO传输延迟可控制在亚毫秒级
-
灵活性:支持1-127个节点,即插即用
-
可靠性:内置心跳监控、紧急报文等故障机制
1.2 CANopen与CiA-402的关系
┌─────────────────────────────────────┐
│ 应用层 (Application) │
│ ┌───────────────────────────┐ │
│ │ CiA-402 驱动规范 │ │
│ │ (运动控制设备行规) │ │
│ └───────────────────────────┘ │
│ ↓ │
│ ┌───────────────────────────┐ │
│ │ CANopen 通信协议 │ │
│ │ (CiA 301 应用层规范) │ │
│ └───────────────────────────┘ │
│ ↓ │
│ CAN 数据链路层 │
│ (ISO 11898-1) │
└─────────────────────────────────────┘CiA-402是CANopen协议家族中专门针对运动控制设备的应用层规范,定义了伺服驱动器、变频器等设备的标准行为,包括:
-
轮廓位置模式(PPM)
-
轮廓速度模式(PVM)
-
回零模式(Homing)
-
循环同步模式(CSP/CSV/CST)
2. CANopen设备模型
2.1 通用设备架构
每个CANopen设备都遵循统一的三层架构模型:
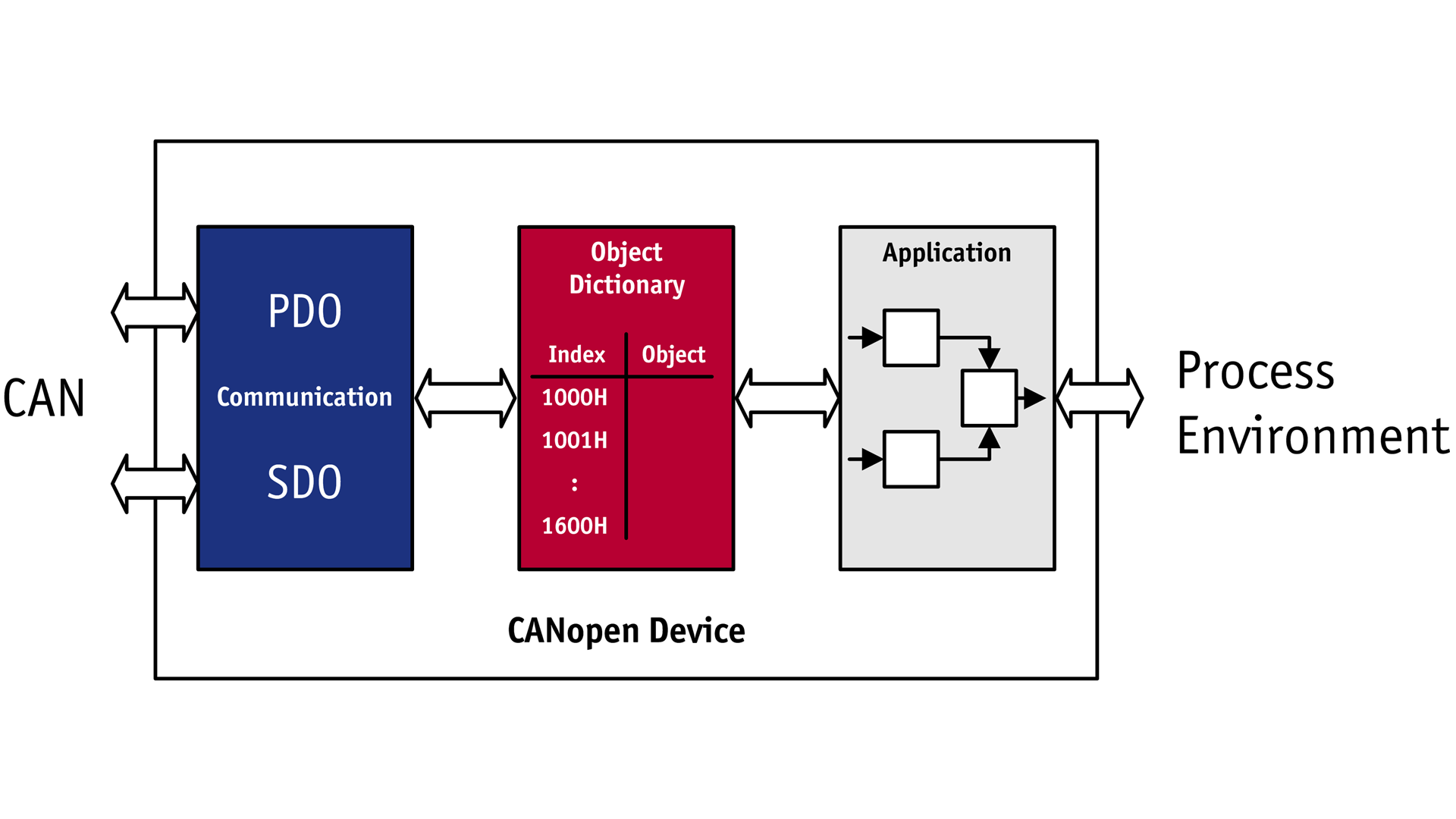
通信接口层:负责CAN帧的收发,处理物理层和数据链路层
对象字典(Object Dictionary):设备的核心数据库,包含所有可访问的参数和变量,通过索引(Index)和子索引(Sub-index)进行寻址
应用程序层:实现具体的设备功能,如运动控制算法、I/O处理等
2.2 对象字典结构
对象字典是CANopen设备的"灵魂",所有通信都围绕对象字典展开:
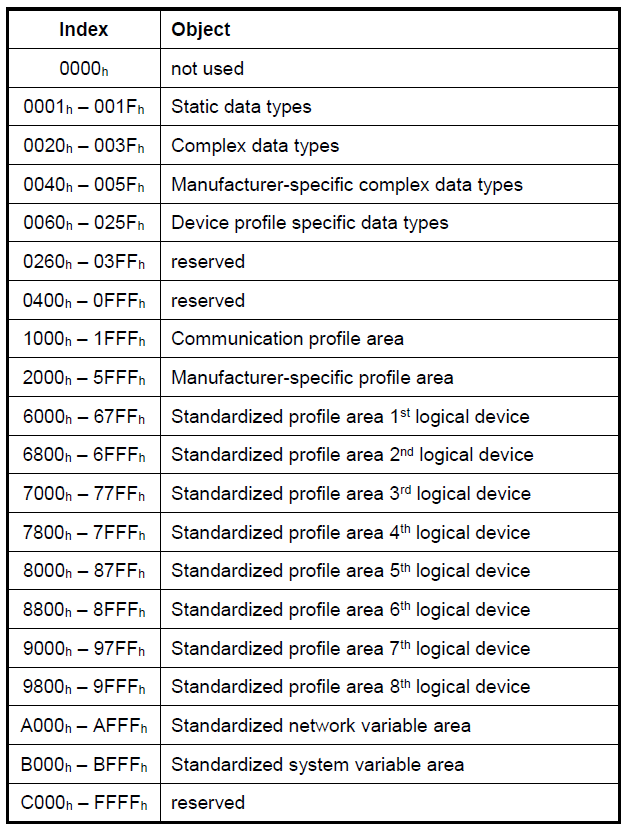
对象字典分区说明:
| 索引范围 | 区域名称 | 内容描述 |
|---|---|---|
| 0x0001-0x001F | 静态数据类型 | 标准数据类型定义 |
| 0x0020-0x003F | 复杂数据类型 | 预定义结构体 |
| 0x1000-0x1FFF | 通信参数区 | 设备类型、标识、PDO映射、SDO参数 |
| 0x2000-0x5FFF | 制造商特定区 | 厂商自定义参数 |
| 0x6000-0x9FFF | 标准化设备区 | CiA-402运动控制参数 |
| 0xA000-0xFFFF | 保留/网络变量 | 系统保留或网络变量 |
CiA-402关键对象:
| 索引 | 对象名称 | 功能说明 |
|---|---|---|
| 0x6040 | 控制字(Controlword) | 驱动器控制命令 |
| 0x6041 | 状态字(Statusword) | 驱动器状态反馈 |
| 0x6060 | 操作模式 | 设置运行模式 |
| 0x6064 | 实际位置 | 编码器反馈值 |
| 0x607A | 目标位置 | 位置指令值 |
| 0x60FF | 目标速度 | 速度指令值 |
3. CiA-402运动控制规范
3.1 状态机模型
CiA-402定义了严格的状态机,确保设备安全运行。状态转换必须通过特定的控制字序列触发:
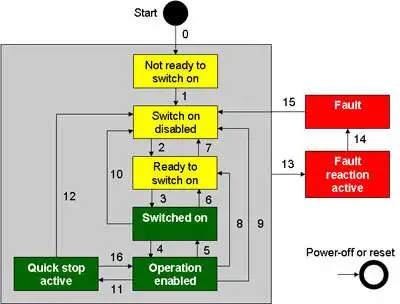
状态说明:
| 状态 | 含义 | 驱动器行为 |
|---|---|---|
| Not Ready to Switch On | 未准备就绪 | 初始化中,不可操作 |
| Switch On Disabled | 启动禁止 | 初始化完成,等待启动命令 |
| Ready to Switch On | 准备启动 | 电源准备好,等待使能 |
| Switched On | 已启动 | 电源已接通,等待运行命令 |
| Operation Enabled | 运行使能 | 正常运行状态,可接受运动指令 |
| Quick Stop Active | 快速停止中 | 正在执行快速停止减速 |
| Fault Reaction Active | 故障响应中 | 检测到故障,正在处理 |
| Fault | 故障状态 | 故障锁定,需复位才能退出 |
控制字位定义(0x6040):
| 位 | 名称 | 功能 |
|---|---|---|
| 0 | Switch On | 启动电源 |
| 1 | Enable Voltage | 使能电压 |
| 2 | Quick Stop | 快速停止(0有效) |
| 3 | Enable Operation | 使能运行 |
| 7 | Fault Reset | 故障复位(上升沿触发) |
| 8 | Halt | 暂停当前运动 |
状态字位定义(0x6041):
| 位 | 名称 | 含义 |
|---|---|---|
| 0 | Ready to Switch On | 准备启动 |
| 1 | Switched On | 已启动 |
| 2 | Operation Enabled | 运行使能 |
| 3 | Fault | 故障状态 |
| 10 | Target Reached | 目标位置到达 |
| 12 | Actual Value Follows | 实际值跟随指令值 |
3.2 操作模式详解
CiA-402定义了多种标准操作模式,适应不同应用场景:
轮廓位置模式(Profile Position Mode)
-
适用场景:点到点定位,如数控机床、搬运机械手
-
特点:驱动器内部完成轨迹规划(S曲线或梯形)
-
关键参数:目标位置、轮廓速度、加速度、减速度
轮廓速度模式(Profile Velocity Mode)
-
适用场景:连续调速,如输送带、卷绕设备
-
特点:速度指令平滑过渡,支持方向控制
-
关键参数:目标速度、加速度、减速度
回零模式(Homing Mode)
-
适用场景:机械原点校准,如开机初始化
-
方法多样:限位回零、原点开关回零、当前位置回零等
-
关键参数:回零方法、回零速度、偏移量
循环同步模式(Cyclic Synchronous Modes)
-
CSP(循环同步位置):主机周期性下发位置指令,驱动器执行位置环
-
CSV(循环同步速度):主机周期性下发速度指令,驱动器执行速度环
-
CST(循环同步力矩):主机周期性下发力矩指令,用于力控应用
模式选择建议:
| 应用需求 | 推荐模式 | 同步要求 |
|---|---|---|
| 单轴精确定位 | PPM | 无 |
| 多轴插补联动 | CSP | SYNC信号同步 |
| 恒张力控制 | CSV/CST | SYNC信号同步 |
| 电子齿轮/凸轮 | CSP | SYNC信号同步 |
4. 通信对象详解
4.1 SDO(服务数据对象)
用途:参数配置、非实时数据交换、诊断信息读取
特点:
-
客户端-服务器模式,必须确认响应
-
支持任意长度数据传输(分段传输)
-
传输优先级低于PDO
通信流程:
主机请求 (Client) 从机响应 (Server)
│ │
├─ SDO Download Request ────────>│ 写入参数
│<──────── SDO Response ─────────┤ 确认写入
│ │
├─ SDO Upload Request ─────────>│ 读取参数
│<──────── SDO Response ─────────┤ 返回数据典型应用:
-
修改PDO映射参数
-
读取驱动器固件版本
-
设置电子齿轮比
-
读取故障历史记录
4.2 PDO(过程数据对象)
用途:实时数据传输,周期性交换控制指令和状态反馈
特点:
-
生产者-消费者模式,无需确认
-
传输延迟极低(<1ms)
-
支持同步触发(SYNC)或异步触发(事件触发)
PDO类型:
| 类型 | 方向 | COB-ID范围 | 典型映射内容 |
|---|---|---|---|
| TPDO1 | 从机→主机 | 0x180-0x1FF | 状态字+实际位置 |
| TPDO2 | 从机→主机 | 0x280-0x2FF | 实际速度+实际力矩 |
| RPDO1 | 主机→从机 | 0x200-0x27F | 控制字+目标位置 |
| RPDO2 | 主机→从机 | 0x300-0x37F | 目标速度+目标力矩 |
同步传输机制:
在多轴同步应用中,使用SYNC信号确保所有轴同时更新:
-
主机通过SYNC对象(COB-ID: 0x080)广播同步信号
-
所有从机在接收到SYNC后,同时采样并发送TPDO
-
主机计算各轴指令后,通过RPDO下发
-
下一个SYNC周期,从机同时执行新指令
这种机制可将多轴同步抖动控制在微秒级。
4.3 NMT(网络管理)
用途:节点状态管理、网络启动/停止控制
NMT命令:
| 命令字 | 功能 | 影响范围 |
|---|---|---|
| 0x01 | 启动远程节点 | 指定节点或全部节点 |
| 0x02 | 停止远程节点 | 停止PDO通信 |
| 0x80 | 进入预操作状态 | 停止PDO,允许SDO |
| 0x81 | 复位节点 | 完全复位设备 |
| 0x82 | 复位通信 | 仅复位通信参数 |
节点守护与心跳:
-
心跳(Heartbeat):从机周期性(如1s)发送自身状态,主机监控
-
节点守护(Node Guarding):主机轮询从机状态(已不推荐,被心跳取代)
5. 网络拓扑与物理层
5.1 总线拓扑结构
CANopen网络采用总线型拓扑,所有节点并联连接:
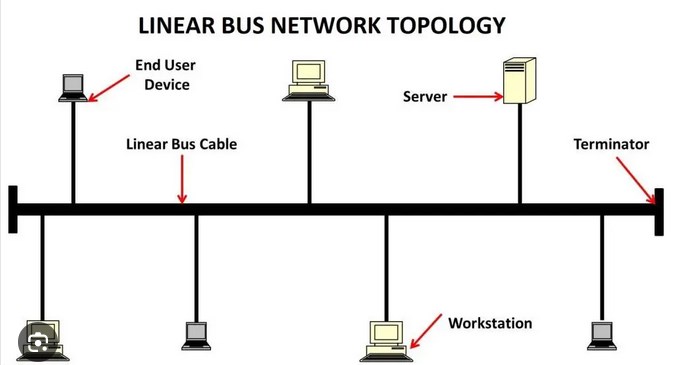
布线要点:
-
主干线+支线:尽量缩短支线长度,避免星型拓扑
-
终端电阻:总线两端必须接120Ω终端电阻,防止信号反射
-
屏蔽接地:屏蔽层单点接地,避免地环流
-
波特率与距离:
-
1 Mbps:最长40米
-
500 kbps:最长100米
-
250 kbps:最长250米
-
125 kbps:最长500米
-
50 kbps:最长1公里
-
5.2 连接器与电缆
推荐标准:
-
连接器:DB9(CiA 303-1)或M12(工业防护)
-
电缆:双绞屏蔽线,特性阻抗120Ω
-
引脚定义:
-
CAN_H:高电平CAN信号
-
CAN_L:低电平CAN信号
-
GND:信号地
-
Shield:屏蔽层
-
5.3 节点ID分配
CANopen支持1-127个节点,ID分配建议:
| ID范围 | 用途 |
|---|---|
| 0 | 保留(广播) |
| 1-10 | 主控制器、PLC |
| 11-50 | 伺服驱动器 |
| 51-100 | I/O模块、传感器 |
| 101-127 | 预留/备用 |
6. 典型应用场景
6.1 应用场景一:数控机床多轴联动
系统架构:
-
主控制器:工业PC或运动控制卡
-
伺服驱动:3-5轴(X/Y/Z/主轴/刀库)
-
通信周期:1-4ms SYNC同步
实现要点:
-
使用CSP模式实现插补联动
-
通过SYNC信号确保各轴同步更新
-
利用Emergency对象实时监控伺服报警
6.2 应用场景二:机器人关节控制
系统架构:
-
主控制器:机器人专用控制器
-
关节驱动:6轴伺服(协作机器人)或更多(工业机器人)
-
通信周期:1ms高速同步
实现要点:
-
CSP模式实现轨迹跟踪
-
CST模式实现碰撞检测(力矩监控)
-
通过SDO动态修改力矩限制实现安全保护
6.3 应用场景三:包装机械
系统架构:
-
主控制器:PLC
-
送料轴:PVM模式,连续调速
-
切刀轴:PPM模式,飞剪控制
-
通信周期:2-10ms
实现要点:
-
电子凸轮功能(通过CSP实现虚拟主轴)
-
色标追踪(通过位置补偿调整)
-
高速计数器与PDO触发结合
6.4 应用场景四:锂电生产设备
系统架构:
-
主控制器:专用运动控制器
-
放卷轴:CSV模式,张力闭环
-
收卷轴:CSP模式,跟随线速度
-
通信周期:1ms
实现要点:
-
卷径计算与锥度控制
-
张力传感器与力矩前馈结合
-
多段速度规划实现平稳换卷
7. 实施建议与最佳实践
7.1 开发流程建议
阶段一:网络规划
-
确定节点数量和ID分配
-
选择合适的波特率(权衡速度与距离)
-
设计PDO映射(最小化通信负载)
-
规划同步周期(根据控制需求)
阶段二:设备配置
-
通过SDO配置通信参数(节点ID、波特率)
-
配置PDO映射(TPDO/RPDO对象、传输类型)
-
设置心跳或节点守护时间
-
保存配置到非易失存储
阶段三:应用开发
-
实现NMT管理(网络启动/停止)
-
实现SDO通信(参数读写)
-
实现PDO通信(实时控制)
-
实现故障处理(Emergency监控)
7.2 性能优化技巧
PDO优化:
-
将最常用的数据放在PDO1(优先级最高)
-
使用同步传输确保多轴同步
-
合理设置抑制时间(Inhibit Time),避免总线过载
SDO优化:
-
初始化阶段批量配置,运行时避免频繁SDO
-
使用块传输(Block Transfer)传输大量数据
-
利用SDO并行性(同时访问不同节点)
网络优化:
-
控制总线负载率<50%(推荐<30%)
-
使用CAN分析仪监控错误帧
-
合理设置采样点(推荐75%-87.5%)
7.3 故障排查指南
通信故障:
-
现象:节点无法上线
-
排查:检查终端电阻、波特率设置、物理连接
-
工具:CAN分析仪、示波器
同步故障:
-
现象:多轴不同步或抖动大
-
排查:检查SYNC周期、PDO传输类型、网络负载
-
优化:缩短SYNC周期、优化PDO映射
控制故障:
-
现象:电机不响应或运行异常
-
排查:检查状态机转换、控制字序列、限位开关
-
监控:实时读取状态字和实际值
7.4 标准化与互操作性
EDS文件: 每个CANopen设备都应提供EDS(Electronic Data Sheet)文件,描述设备的对象字典结构和通信能力。主站软件通过EDS文件自动识别设备参数。
一致性测试: CiA提供CANopen一致性测试工具,验证设备是否符合规范,确保不同厂商设备的互操作性。
未来趋势:
-
CANopen FD:基于CAN FD,提升带宽至5Mbps+
-
Safety over CANopen:集成安全通信(CiA 304)
-
与EtherCAT融合:通过网关实现混合网络
总结
CANopen-402协议作为工业运动控制领域的国际标准,通过标准化的对象字典、严格的状态机和灵活的通信机制,为伺服驱动器、变频器等设备提供了统一的通信语言。其优势在于:
-
开放性:国际标准,多厂商支持
-
实时性:满足大多数运动控制需求
-
可靠性:内置完善的故障管理机制
-
灵活性:支持从简单到复杂的各类应用
无论是简单的单轴定位,还是复杂的多轴机器人控制,CANopen-402都能提供可靠的解决方案。掌握这一协议,是工业自动化工程师的必备技能。
参考资源:
-
CiA 301: CANopen应用层和通信规范
-
CiA 402: 伺服驱动器和运动控制设备规范
-
CiA 306: EDS规范
-
ISO 11898: CAN总线物理层和数据链路层标准

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)