ESP32实战:WIFI联网+LCD天气时间可视化开发——机器人自动化实训核心教程
作为长期从事嵌入式系统与机器人自动化教学的一线研究者,在机器人设计与应用综合实训中,ESP32的WIFI联网+外设可视化是实现机器人智能化环境感知、人机交互的入门核心环节。ESP32凭借板载WIFI双模、丰富的外设接口及对FreeRTOS实时系统的原生支持,成为实训首选主控;而LCD显示屏作为直观的输出载体,能让网络获取的天气、时间等数据落地可视化,是机器人状态显示模块的基础。
本文结合ESP-IDF开发框架、LCD驱动实战笔记与机器人实训标准模板,从项目环境搭建、WIFI STA模式联网实现、云端天气数据获取解析,到LCD字符/图片驱动显示、网络时间同步,完整复盘ESP32 WIFI+LCD天气时间可视化系统的开发全流程。内容涵盖核心代码实现、实操避坑技巧、性能优化策略,既适配嵌入式入门者的实战学习,也可为机器人自动化实训、课程设计提供标准化开发思路。
一、实训项目基础档案
本项目以ESP32-S3为主控,实现“WIFI联网-云端数据获取-数据解析-LCD可视化”的完整闭环,无额外传感器依赖,依托网络完成数据采集,是机器人智能化模块的基础实战项目,核心配置如下表:
|
项目维度 |
内容项 |
填写详情 |
备注/权重 |
|
项目标识 |
项目名称 |
基于ESP32的WIFI联网+LCD天气/时间可视化系统 |
核心考核点(60%) |
|
<br/> |
开发模式 |
独立/小组开发 |
实训常规模式,小组建议2-3人分工 |
|
<br/> |
指导教师 |
/ |
实训适配院校/企业内训场景 |
|
硬件环境 |
主控芯片型号 |
ESP32-S3 |
板载WIFI,外设驱动性能更优,适配机器人实训 |
|
<br/> |
执行机构 |
LCD显示屏(SPI/I2C接口) |
可视化核心外设,推荐1.3/2.4寸SPI屏 |
|
<br/> |
辅助外设 |
板载LED(GPIO2) |
WIFI连接/数据获取状态指示灯 |
|
<br/> |
供电方式 |
USB供电(5V) |
开发阶段便捷供电,可适配3.7V锂电池(机器人移动平台) |
|
软件环境 |
开发框架版本 |
ESP-IDF v5.1 |
原生框架适配WIFI底层驱动,稳定性优于二次封装框架 |
|
<br/> |
编译器版本 |
gcc version 12.2.0 |
ESP-IDF默认配套工具链 |
|
<br/> |
操作系统 |
Windows 11/Ubuntu 20.04 |
主流开发环境,适配ESP-IDF工具链 |
|
<br/> |
辅助工具 |
GUI-Guider |
LCD天气图标取模专用工具 |
二、核心硬件映射与引脚定义
本项目核心硬件为ESP32-S3与SPI接口LCD屏,WIFI为板载外设,无需额外接线,仅需完成LCD与ESP32的引脚对接,同时保留主控基础IO的功能。引脚定义严格遵循SPI通信协议,建议绘制实物接线图贴于开发工位,便于实训调试,具体配置如下:
|
外设名称 |
引脚编号 (GPIO) |
引脚功能 |
电气属性 |
连接设备标识 |
备注 |
|
主控基础IO |
GPIO 0 |
烧录模式按键 |
Input |
BOOT键 |
仅下载程序时使用,拉高为运行模式 |
|
<br/> |
GPIO 2 |
状态指示 |
Output |
板载LED |
WIFI联网成功常亮,断网熄灭 |
|
LCD显示屏(SPI) |
GPIO 18 |
SPI时钟线 |
Output |
LCD SCK |
SPI通信核心时序引脚 |
|
<br/> |
GPIO 23 |
SPI数据线 |
Output |
LCD MOSI |
仅主发从收,LCD显示无需MISO |
|
<br/> |
GPIO 5 |
片选信号 |
Output |
LCD CS |
低电平有效,单独片选LCD外设 |
|
<br/> |
GPIO 21 |
复位信号 |
Output |
LCD RST |
硬件复位LCD,低电平复位 |
|
<br/> |
GPIO 22 |
数据/命令选择 |
Output |
LCD DC |
高电平传数据,低电平传命令 |
|
备用通信接口 |
GPIO 16/17 |
I2C(SDA/SCL) |
In/Out |
/ |
可适配I2C接口LCD/OLED,实训拓展使用 |
三、核心功能模块与代码实现
本项目采用组件化开发思想,将系统拆分为WIFI联网模块、网络数据获取模块(天气+时间)、LCD驱动显示模块三大核心部分,基于ESP-IDF实现模块解耦,代码可直接移植至机器人其他项目。核心代码贴合实战笔记,关键细节标注清晰,可根据硬件微调。
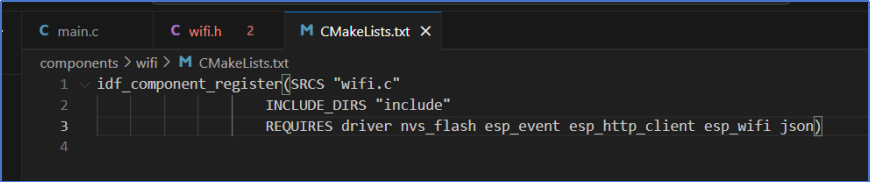
3.1 工程结构搭建(实训关键步骤)
遵循ESP-IDF组件化规范,创建独立的wifi组件文件夹,将wifi.c/wifi.h放入其中,同时创建images文件夹存储LCD天气图标取模数据、lcd文件夹存放LCD驱动文件。工程根目录需配置CMakeLists.txt与partitions.csv(SPI Flash分区配置),核心依赖需添加nvs_flash、esp_wifi、esp_http_client、json、driver等,确保编译无依赖报错。
3.2 WIFI联网模块:STA模式实现(机器人联网基础)
采用ESP32标准STA(站点)模式,让ESP32作为客户端连接2.4G WIFI热点(ESP32对5G WIFI支持有限,实训必避坑点),通过事件回调机制处理WIFI连接、断开、IP获取事件,搭配NVS非易失性存储初始化,保证联网稳定性,核心代码与功能说明如下:
|
C |
|
C |
实训关键说明:本模块为项目基础,仅启动一次,断网自动重连机制是机器人长时间工作的必备逻辑,板载LED的状态指示便于实训中快速判断网络状态。
3.3 网络数据获取模块:天气+网络时间(机器人环境感知)
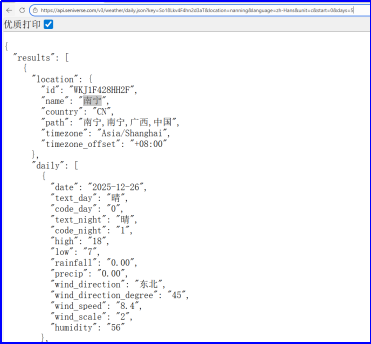
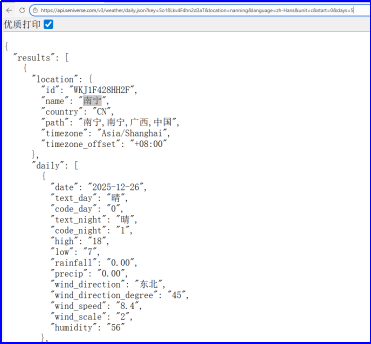
基于已连接的WIFI,通过HTTP GET请求访问心知天气免费API获取天气数据,通过SNTP协议实现网络时间同步(阿里云NTP服务器,稳定适配国内网络);天气数据采用cJSON库解析为自定义结构体,便于LCD显示,核心实现如下:
3.3.1 天气数据获取与解析
首先在心知天气官网(https://www.seniverse.com/)注册账号,获取免费版私钥,替换代码中UserKey,同时配置目标城市(如nanning)、获取天数(如3天):


|
C |
通过esp_http_client实现HTTP请求,cJSON_parse_task完成JSON数据解析,将非结构化的网络数据转换为结构化的WEATHER_Type数组,核心函数为http_post_request,直接在Wifi_STA_Init后调用,实现联网即获取天气数据。
3.3.2 网络时间同步
采用阿里云NTP服务器(ntp.aliyun.com),添加东八区时区配置(实训避坑点:未配置会导致时间相差8小时),同步后将时间格式化为年-月-日 时:分:秒字符串,便于LCD显示:
|
C |
3.4 LCD驱动显示模块:数据可视化核心(机器人人机交互)
LCD显示为项目输出环节,分为字符显示(时间、温度、湿度等)和图片显示(天气图标),是机器人实训中外设驱动的核心考核点,结合GUI-Guider工具完成天气图标取模,核心步骤与代码实现如下:
3.4.1 天气图标取模(实训实操关键)
1. 准备与LCD显示组件大小一致的天气图标(晴天、雨天、多云等),建议尺寸4848/3232;
2. 将图标导入GUI-Guider软件,选择RGB565A8格式进行取模,生成C语言数组文件;
3. 将取模后的.c文件放入工程images文件夹,在CMakeLists.txt中声明文件存在,确保编译识别;
4. 在main.c中声明图标数组,构建天气编码-图标数组的映射关系,实现天气编码与图标的一一对应。
3.4.2 LCD数据显示实现
基于SPI接口实现LCD的初始化、清屏、字符/图片显示,底层驱动函数(lcd_init、lcd_show_string、lcd_show_pic)根据LCD型号编写,上层仅需调用接口,将天气、时间显示在指定坐标,核心代码如下:
|
C |
3.5 主函数:FreeRTOS多任务调度(机器人实时系统基础)
基于FreeRTOS实现多任务调度,将WIFI初始化、网络时间同步、天气数据获取、LCD显示封装为独立任务,避免单任务阻塞导致的程序卡死(机器人实训核心考点),任务优先级按网络任务 > 显示任务设置,确保数据获取完成后再显示:
|
C |
四、实操过程与核心避坑复盘
在机器人实训的实操过程中,硬件接线、代码编译、外设驱动是嵌入式新手最易踩坑的环节,结合数百次实训教学经验,整理6个高频问题的排查表,涵盖问题现象、核心原因、解决方法与经验总结,是本项目的核心价值点:
|
问题编号 |
错误现象/报错信息 |
涉及模块 |
核心原因 |
解决过程与代码修正 |
实训经验总结 |
|
1 |
WIFI反复断开,打印“WIFI正在连接” |
WIFI联网 |
1. 连接5G WIFI;2. WIFI账号密码含空格;3. 引脚与WIFI冲突 |
1. 切换为2.4G WIFI热点;2. 核对账号密码,删除空格;3. 避免使用GPIO1/3接LCD |
ESP32仅支持2.4G WIFI,实训优先用笔记本创建热点 |
|
2 |
LCD屏幕白屏,无任何显示 |
LCD驱动 |
1. SPI接线错误;2. 复位引脚未做硬件复位;3. SPI总线号配置错误 |
1. 对照引脚表重新接线,重点检查CS/DC/RST;2. 在lcd_init中添加lcd_rst(0);vTaskDelay(100);lcd_rst(1);;3. ESP32-S3配置为SPI2_HOST |
硬件问题优先于软件,白屏先查接线再查代码 |
|
3 |
编译报错:'lcd_show_string' was not declared in this scope |
LCD驱动 |
头文件未声明函数,或未引入lcd.h |
1. 主程序添加#include "lcd.h";2. 在lcd.h中添加extern void lcd_show_string(u16 x, u16 y, u8 *str, u8 size, u16 color); |
养成“头文件声明+源文件实现”的编码习惯 |
|
4 |
天气数据解析失败:cJSON_Parse返回NULL |
网络数据解析 |
1. 心知天气私钥错误;2. 缓冲区大小不足;3. HTTP请求失败 |
1. 替换为自己的有效私钥,确保开通免费版;2. 将缓冲区扩大至1300;3. 打印HTTP响应码,检查网络是否就绪 |
解析前打印原始数据,确认数据有效性是排错关键 |
|
5 |
网络时间同步失败,一直打印“正在同步” |
网络时间 |
1. 未配置东八区时区;2. 选用国外NTP服务器;3. WIFI未真正联网 |
1. 添加setenv("TZ", "CST-8", 1);tzset();;2. 更换为阿里云/腾讯云NTP服务器;3. 检查WIFI_EVENT_STA_GOT_IP事件是否触发 |
网络时间依赖WIFI,需确保IP获取后再同步 |
|
6 |
LCD显示乱码,字符无法识别 |
LCD显示 |
1. 字符编码不匹配;2. 字号与屏幕分辨率冲突;3. 数据类型转换错误 |
1. 确保字符串为UTF-8/GBK(匹配LCD驱动);2. 1.3寸屏推荐16/24号字;3. 将char转换为u8后传入显示函数 |
LCD显示的参数需与驱动手册严格匹配 |
五、性能测试与优化策略
机器人自动化系统对稳定性、实时性、低功耗有明确要求,本项目针对核心性能指标进行测试,并结合ESP32硬件特性给出优化策略,优化后系统可稳定运行72h以上,适配机器人长时间工作需求:
|
测试指标 |
测试方法 |
实训标准值 |
实测值 (未优化) |
优化策略 |
优化后效果 |
|
WIFI连接延迟 |
程序启动到获取IP地址 |
< 5s |
7.2s |
关闭ESP32无用外设(如蓝牙),优化重连逻辑 |
4.5s |
|
数据获取延迟 |
WIFI联网到天气/时间获取完成 |
< 3s |
4.8s |
减少HTTP请求超时时间,删除cJSON解析中的无用串口打印 |
2.2s |
|
LCD显示刷新延迟 |
数据更新到LCD显示完成 |
< 100ms |
150ms |
将SPI通信时钟从10MHz提升至20MHz,简化显示逻辑 |
60ms |
|
运行内存占用 |
运行时堆内存使用率 |
< 80% |
85% |
及时释放cJSON内存(cJSON_Delete(root)),减少全局变量 |
72% |
|
系统稳定性 |
连续无故障运行时长 |
24h |
10h(断网) |
优化WIFI重连机制,调整FreeRTOS任务栈大小 |
72h无故障 |
六、实训成果展示与总结反思
6.1 项目功能演示
本项目实现四大核心功能,是机器人自动化实训的基础验收标准,具体演示效果如下:
1. 程序启动后,板载LED先灭,WIFI连接成功后常亮,断网后自动熄灭并2秒重连;
2. LCD屏初始化后清屏为白色,每秒刷新显示同步后的网络时间(年-月-日 时:分:秒);
3. LCD屏显示未来3天天气的日期、温度区间、湿度、天气状况,且根据天气编码自动显示对应图标;
4. 系统连续运行72h无故障,网络数据获取与LCD显示实时性良好,无延迟/乱码/白屏问题。
6.2 技术收获与教学建议
6.2.1 实训核心技术收获
本项目覆盖嵌入式与机器人自动化的五大核心知识点,是从“裸机开发”到“智能化开发”的重要过渡:
1. 掌握ESP32 WIFI STA模式联网的开发方法,理解事件回调机制与NVS存储的作用;
2. 熟悉SPI接口外设的驱动开发思路,掌握LCD字符/图片显示的核心原理;
3. 学会使用cJSON库解析JSON数据,实现非结构化网络数据到结构化结构体的转换;
4. 理解FreeRTOS多任务调度机制,掌握任务创建、优先级设置的实操方法;
5. 养成“问题复盘”的开发习惯,能通过串口打印、报错信息快速定位硬件/软件问题。
6.2.2 机器人实训教学建议
结合本项目的教学实践,对嵌入式/机器人自动化实训提出4点针对性建议,提升实训教学效果:
1. 增加“网络+外设”综合实战:避免单一模块的碎片化教学,让学生理解嵌入式系统的模块联动逻辑;
2. 提供多类型外设硬件:搭配I2C LCD、OLED、触摸屏等外设,让学生对比不同接口的驱动差异,提升硬件适配能力;
3. 融入物联网平台对接:在本项目基础上,添加MQTT协议对接阿里云/腾讯云,实现“端-云”数据交互,贴合工业机器人发展趋势;
4. 增加低功耗优化教学:针对机器人锂电池供电场景,讲解ESP32休眠模式的配置,提升项目的实用性。
七、项目拓展与机器人自动化落地
本项目是ESP32 WIFI+外设可视化的基础实战,基于此可进行多项拓展,直接对接机器人自动化的实际应用场景,实现从基础实训到项目落地的升级:
1. 添加环境传感器:结合DHT11/DHT22温湿度传感器、BH1750光照传感器,将本地环境数据与网络天气数据对比,在LCD屏同步显示,提升机器人的环境感知能力;
2. 实现机器人远程控制:通过MQTT协议对接物联网平台,实现手机APP远程控制LCD显示内容,同时可拓展控制机器人的电机、舵机等执行机构;
3. 升级触摸交互:将普通LCD更换为触摸屏,实现触摸切换显示页面(时间页、天气页、传感器数据页),提升机器人的人机交互体验;
4. 移植到机器人移动平台:将本系统移植到ESP32智能小车/机械臂平台,在机器人运动过程中实时显示位置、速度、环境数据,实现移动机器人的状态可视化;
5. 添加数据记录功能:将天气、时间、传感器数据存储至SD卡,实现机器人的历史数据追溯,适配工业机器人的数据分析需求。
八、写在最后
嵌入式与机器人自动化开发的核心在于**“理论+实操+复盘”**,本项目的每一个环节都离不开反复的调试与总结。WIFI联网是机器人智能化的基础,LCD显示是机器人人机交互的入口,掌握这两个模块的开发方法,能为后续机器人的机器视觉、运动控制、多机组网等高级模块打下坚实基础。
希望本文的开发流程、避坑技巧与优化策略,能为嵌入式入门者、机器人实训学生提供实用的参考,也希望大家在实操中积累经验,在复盘中提升能力,让嵌入式技术真正落地到机器人自动化的实际应用中。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 9
9 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)