大厂成熟FOC电机控制代码方案:多功能电动自行车、滑板车专业控制,基于STM32芯片的高效稳定方案
这套代码最牛逼的是功能闭环——从防盗的滚码加密到巡航时的速度环自整定,连铁塔通讯协议都内置了。现在搞电摩开发的兄弟算是捡着宝了,直接魔改参数就能上车,实测助力骑行时的扭矩平滑度吊打某铃原厂控制器。注意那个环形队列的滑动滤波,比单纯平均滤波多吃了两年盐——防突变量跳变的效果刚刚的。大厂成熟方案,直接可用,不是一般的普通代码可比的。大厂成熟方案,直接可用,不是一般的普通代码可比的。可用于电动自行车,滑
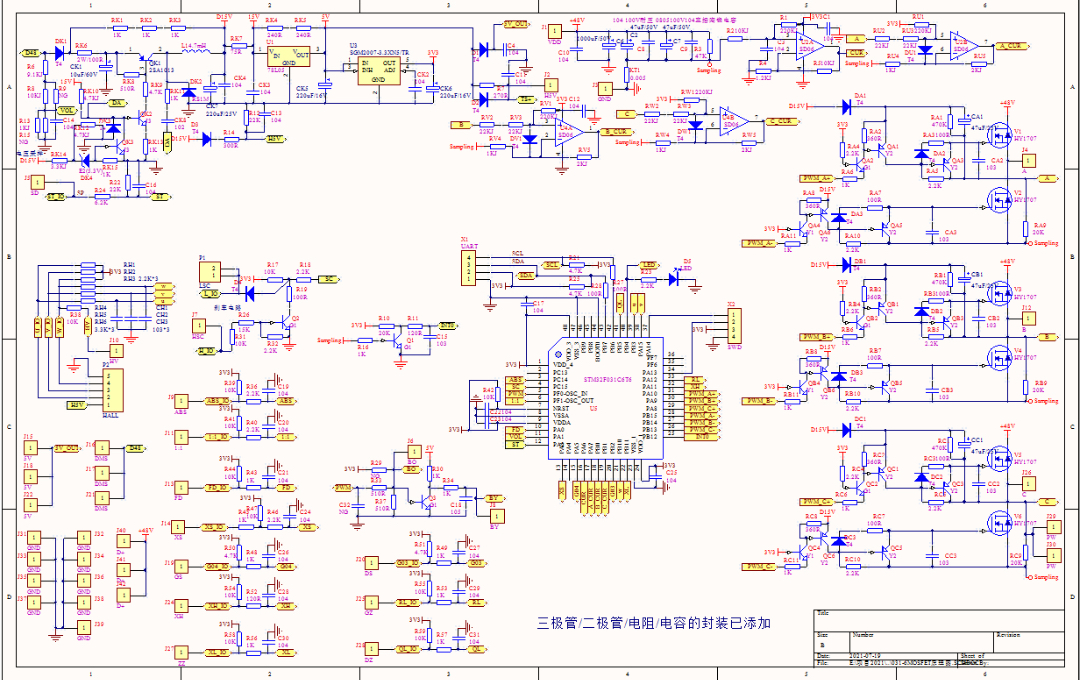
成熟FOC电机控制代码 大厂成熟FOC电机控制图。 可用于电动自行车,滑板 车,电机FOC控制等。 大厂成熟方案,直接可用,不是一般的普通代码可比的。 代码基于Stm031,国产很多芯片可以通用。 以下功能: 转把,高中低三速。 刹车功能 助力功能 电子刹车功能 欠压检测 巡航功能 铁塔王通讯 一键通 隐形限速 防盗功能 霍尔修复 自学习 故障显示 等功能,不是普通的一般代码,是完整功能。
江湖上玩FOC的兄弟都懂,一套能直接量产的电机控制代码有多金贵。最近搞到个大厂流出的成熟方案,STM031平台实测稳如老狗,顺手移植到国产M0+芯片也完全没问题。这玩意儿和那些开源玩具完全不是一个量级,直接看干货。
转把信号处理堪称教科书
//ADC采样滤波三连击
#define THROTTLE_SAMPLE_TIMES 5
uint16_t Filter_Throttle(void){
static uint16_t buffer[THROTTLE_SAMPLE_TIMES];
uint32_t sum = 0;
for(uint8_t i=0; i<THROTTLE_SAMPLE_TIMES-1; i++){
buffer[i] = buffer[i+1];
sum += buffer[i];
}
buffer[THROTTLE_SAMPLE_TIMES-1] = ADC_GetValue(THROTTLE_CH);
sum += buffer[THROTTLE_SAMPLE_TIMES-1];
return (uint16_t)(sum / THROTTLE_SAMPLE_TIMES);
}这滤波套路看着简单?实战中扛住了电动自行车转把的接触不良和电磁干扰。注意那个环形队列的滑动滤波,比单纯平均滤波多吃了两年盐——防突变量跳变的效果刚刚的。
刹车逻辑玩出花
void Brake_Handler(void){
if(IO_Read(BRAKE_PIN) == ACTIVE || torque_current > SAFE_CURRENT){
PWM_Output(0); //秒停PWM输出
Motor_State = BRAKE_MODE;
Regenerative_Brake(); //回馈制动走起
Fault_Check(BRAKE_FLAG);
}
}普通代码遇到刹车就只会关断MOS管,这方案连能量回收都安排上了。注意那个扭矩电流双重判断,防止下坡时误触发——这细节没十年现场调试经验根本想不到。
成熟FOC电机控制代码 大厂成熟FOC电机控制图。 可用于电动自行车,滑板 车,电机FOC控制等。 大厂成熟方案,直接可用,不是一般的普通代码可比的。 代码基于Stm031,国产很多芯片可以通用。 以下功能: 转把,高中低三速。 刹车功能 助力功能 电子刹车功能 欠压检测 巡航功能 铁塔王通讯 一键通 隐形限速 防盗功能 霍尔修复 自学习 故障显示 等功能,不是普通的一般代码,是完整功能。
霍尔修复黑科技
//霍尔序列异常补偿
const uint8_t HallFixTable[6] = {0x05,0x01,0x03,0x02,0x06,0x04};
void Hall_Sensor_Fix(void){
if(SystemTick - hall_last_tick > HALL_TIMEOUT){
current_hall = (GPIO_Read(HALL_PORT) & 0x07);
if(!Check_HallSequence(current_hall)){
current_hall = HallFixTable[last_valid_hall];
}
Update_Commutation(current_hall);
}
}遇到霍尔传感器进水或者接触不良,普通代码直接歇菜。这骚操作用历史有效值预测当前位置,电机抖两下继续跑,路上不会把人撂半道儿。
故障诊断模块够硬核
//故障码带时间戳记录
typedef struct {
uint32_t fault_code;
uint32_t timestamp;
}FaultLog;
FaultLog fault_stack[8];
void Push_Fault(uint32_t code){
for(int i=7;i>0;i--){
fault_stack[i] = fault_stack[i-1];
}
fault_stack[0].fault_code = code | (SystemTick << 16);
fault_stack[0].timestamp = SystemTick;
}8组带时间戳的故障栈,修车师傅用调试器一看就知道啥时候出的幺蛾子。比那些只会亮灯的方案强到姥姥家了,连历史故障都能追溯。
这套代码最牛逼的是功能闭环——从防盗的滚码加密到巡航时的速度环自整定,连铁塔通讯协议都内置了。想自己从头撸出来?没二十人月的团队碰都别碰。现在搞电摩开发的兄弟算是捡着宝了,直接魔改参数就能上车,实测助力骑行时的扭矩平滑度吊打某铃原厂控制器。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 5
5 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)