脉振方波高频注入无感算法
HFI
一、背景
永磁同步电机根据不同结构有很多种分类方式,最常见就是根据永磁体和转子安装位置分为表贴式(永磁体在转子表面,SPMSM)和内嵌式(永磁体在转子内部,IPMSM)。根据不同的PMSM结构,衍生出了很多种适用于不同结构的无感算法。
基于反电势(EMF)是两种电机都适用的无感算法,但是根据我们电机物理模型可以发现:电机反电势部分与转子角速度有关,这就导致转子在低速下(普遍认为0-500rpm为低速)反电势很小,导致观测器误差增大甚至失效。由此产生适用于低俗下的无感观测器。HFI和非线性磁链观测器都适用于低速,但是HFI利用了PMSM的凸极率,也就是DQ轴电感的差值,SPMSM的DQ轴电感几乎相等,所以普遍认为HFI几乎只适用于IPMSM。高频注入注入方法也有很多种,最常见的就是旋转注入法和脉振注入法,本文主要介绍的是基于VESC的高频方波脉振注入法。
二、基本原理
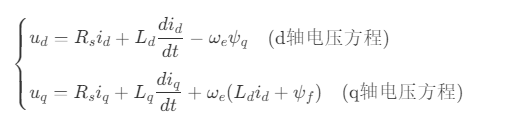
电机物理模型
先看一下dq轴的电感矩阵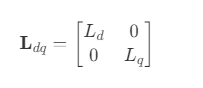
通过DQ轴电感矩阵和旋转变换矩阵、逆变换矩阵计算而来,利用二倍角公式和DQ轴电感化简得到。最终推导出电感以2θ的频率变换进而推导出θ

HFI高频方波的核心是基于电机基波频率基础上(几十HZ),向D轴注入高频方波电压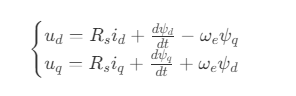
在低速高频状态下,电感阻抗远大于电阻,可将电阻压降忽略;
D低速情况下反电势耦合项也很小可以忽略不计,最终方程可以化简为:
移相后做积分,把注入电压带入可以最终得到注入电流与注入电压成正比与频率成反比
在αβ坐标轴下电感方程为![]()
将电感带入注入电流方程中,并通过泰勒公式化简展开得到: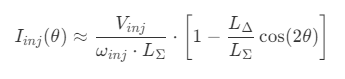
我们可以明显看到包含直流项和与转子位置相关的部分,与转子位置相关的部分就是我们要做处理的部分。
HFI注入与角度提取过程
HFI是向d轴注入高频方波电压,但是我们并不知道此时转子角度值,实际代码应用中,我们会常常设置一个角度预测值θ,根据这个θ向αβ轴注入电压,经过坐标变换后可以等效为像d轴注入电压。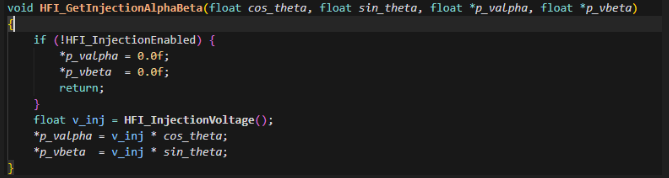
由于我们注入的是方波,所以可能在理解上有很多误区,很多刚学习的朋友认为注入电压应该是500-2khz,通过带通/高通滤波器提取注入电压,但这种注入方法是注入正弦波时。对于方波来说我们通过注入正向电压和反向电压,再通过差分除去基波和部分噪声,除以二之后就是注入电压成分。再正式介绍之前我先回答一下可能会遇到的疑惑。
Q&A
Q:方波注入为什么不是500-2khz呢,方波注入频率是多少呢
A:刚才我们提到过,方波注入是通过差分方式来提取注入分量,而对于低端采样来说(可以去上一篇文章了解一下不同采样方式),我们在V0时刻下桥臂导通时进行电流采样;而注入电压时刻选择PWM周期开始时,此时上桥臂全部导通,在零矢量时刻进行注入,可以得到更少噪声的信号。一个PWM周期注入正向电压,另一个PWM周期注入负向电压,通过对两个PWM周期采样电流差分,得到我们高频电压注入响应出的电流。由于采样特殊性,方波注入频率为PWM载波频率的二分之一,以10khzPWM载波为例,注入频率就是5khz。不是我们经常提到的500-2khz。
Q:注入为什么选择D轴,为什么在αβ轴上注入,而不是直接向d轴注入呢
A:根据电机物理模型和基本性能,PMSM转矩由永磁转矩和磁阻转矩组成,永磁转矩是主导部分由q轴电流大小来直接控制,磁阻转矩由d轴电流间接调节,向d轴注入电流就是为了尽可能减小对电机输出转矩的影响。保证电机运行状态平稳。我们事先并不知道转子实际位置,所以无法直接向d轴注入电压,而是通过估计角度值来向αβ轴上注入,经过坐标变换等效映射为注入d轴电压。
Q:注入电压之前,为什么要进行转子极性辨识呢
A:在高频注入时,我们的角度信息往往是与2θ有关,我们因此会得到两个角度信息θ与θ+180°,如果不进行极性辨识可能会出现反转的现象。
辨识原理:根据定子铁心的饱和非线性原理,当d轴电压与转子极性相同时,定子磁通饱和度增强,定子电感变小,高频响应电流幅值变大;如果d轴电压与转子极性相反时,定子磁通饱和度减弱,定子电感变大,高频响应电流幅值减小。分别注入正向电压和反向电压。判断正向响应电流与反向响应电流大小,如果正向响应电流大于反向响应电流,则证明注入方向是d轴正方向不需要补偿,反之则需要补偿。
三、代码实现
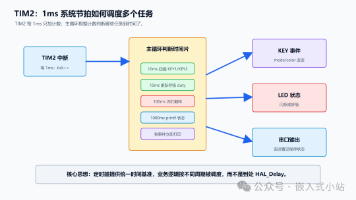
1.整个系统都是基于10khz定时器中断来实现,PWM中心对齐,PWM中点触发硬件ADC采样。
2.转子极性辨识: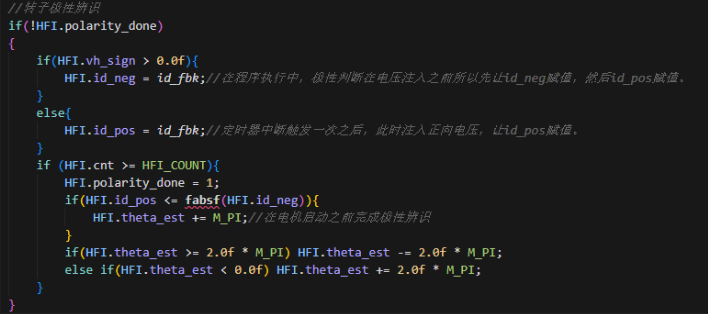
3.

根据推导出的电流差分公式来计算误差角度值,当θ很小时,sinθ收敛到θ。我们直接认为两者相等,进而化简公式直接计算角度误差。注意此时误差一定要小于pi/4,否则误差太大会导致无法收敛。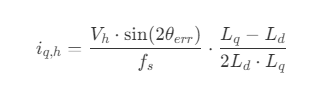
4.
以上代码实现了高频方波注入基础代码的功能,将其与电流环、SVPWM部分结合来驱动电机。下面是基于对PLL的Kp,Ki的分析与设计
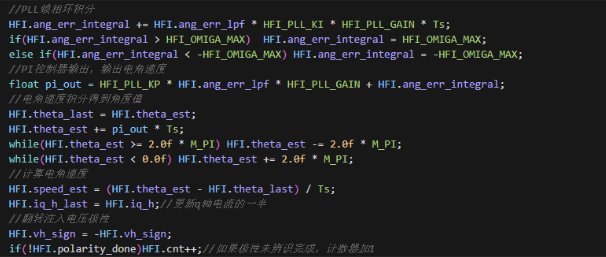
PLL锁相环控制系统
整个系统框图如下图所示

得到角度误差之后通过一个PI控制器之后,再积分得到估计角度值。系统为二阶系统。
系统开环传递函数为: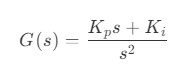
其中:
根据开环传递函数求闭环传递函数,设置不同的PI参数,对系统进行时域分析。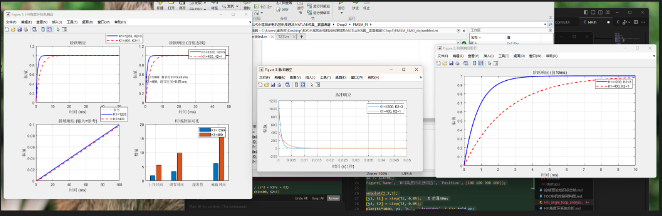
在VESC工程中默认Kp=1200,Ki=3;此时阻尼比为346,自然频率为1.732。
此时为过阻尼系统无超调响应时间为3ms左右
频域分析:
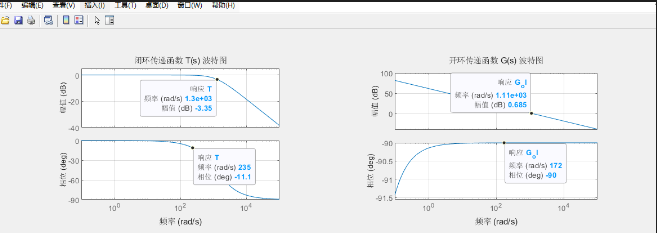
可以看到开环传递函数伯德图截止频率约为172Hz,相位裕度为90°无震荡无超调;增益裕度为∞,系统稳定。闭环传递函数伯德图显示带宽约为207Hz;相位延迟很小只有几度。整体来看系统性能还是比较好的,但是具体工况不同,我们可能需要做出对应参数改变,使系统性能保持最佳。
四、总结
网上提到的高频注入说的都是只适用于IPMSM,这里有个误区,一般只有旋转注入法才能只适用于IPMSM,脉振注入法在凸极比比较小的SPMSM中同样适用。本文章全是个人观点,总结了学习理解时遇到的一些问题,希望可以帮助其他学者解答学习时遇到的问题。文章内容请带有批判的眼光来看,如有错误敬请指正。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)