永磁同步电机无位置传感器算法仿真(有报告,教程视频,源代码) 采用低速IF+中高速龙贝格观测器...
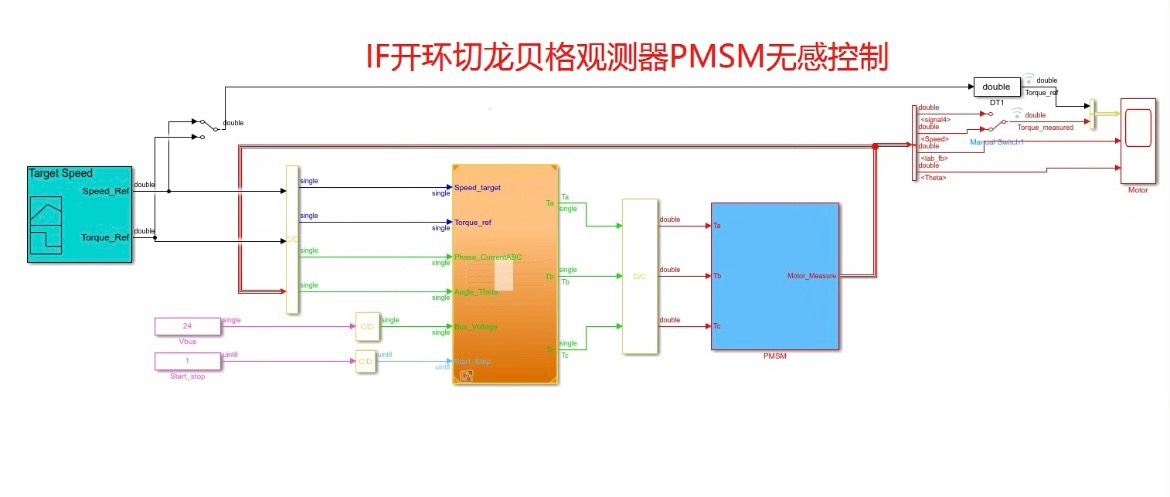
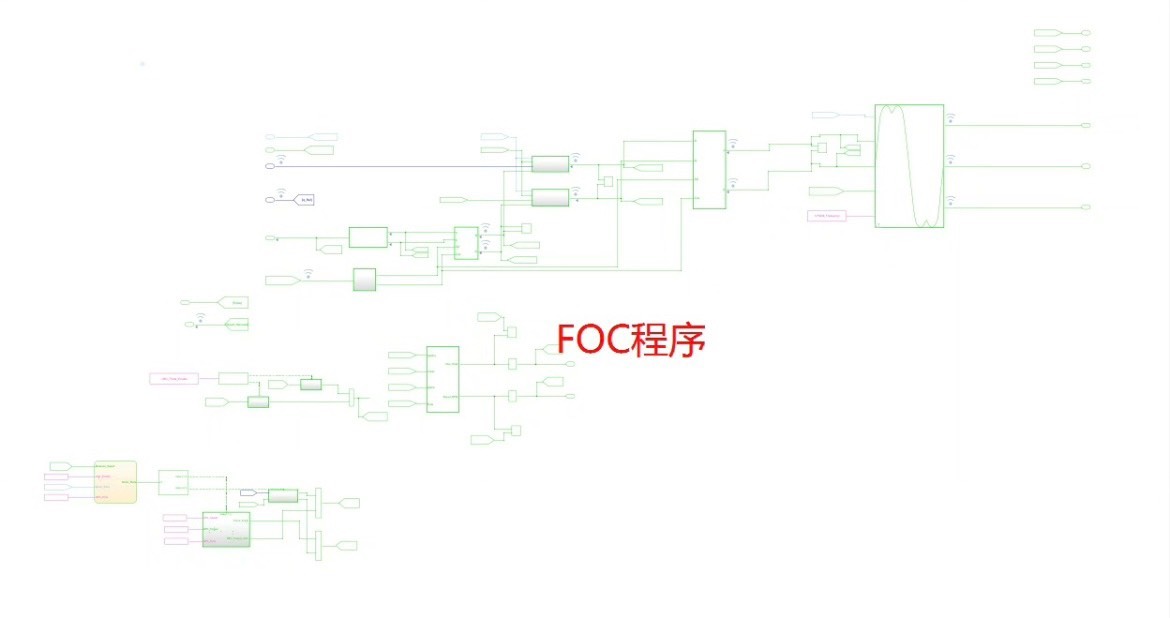
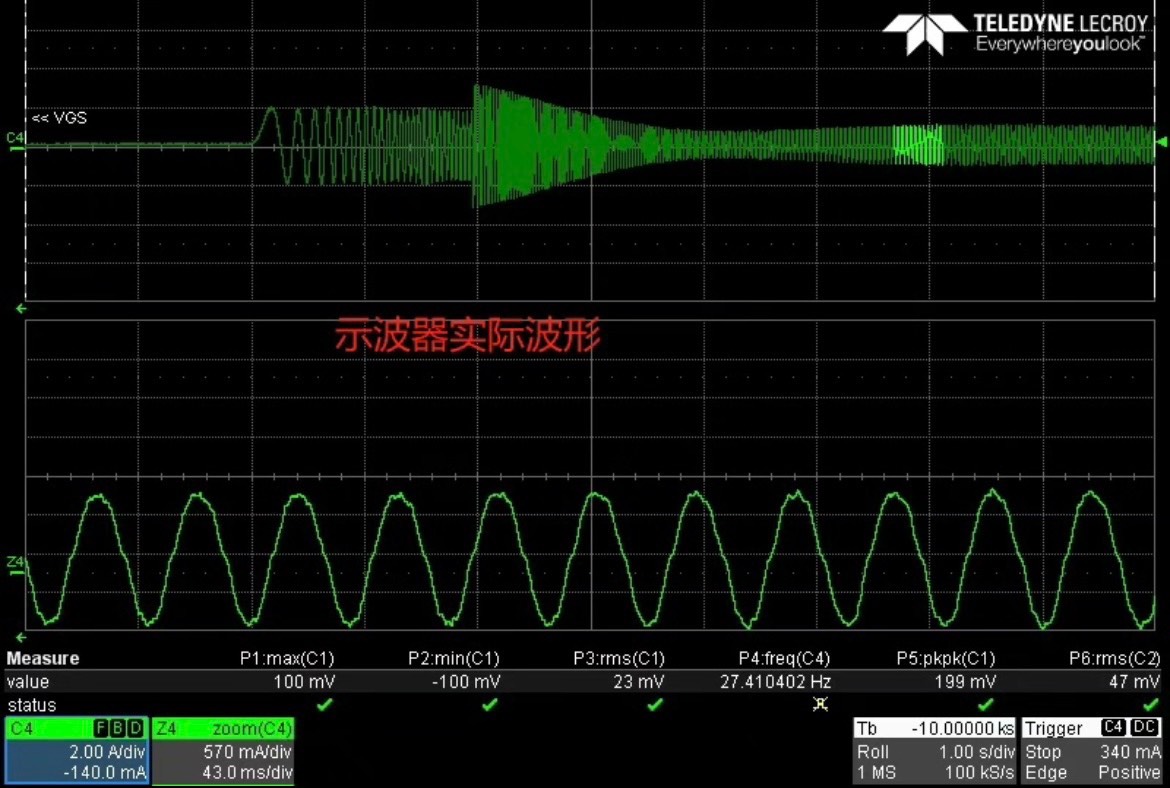
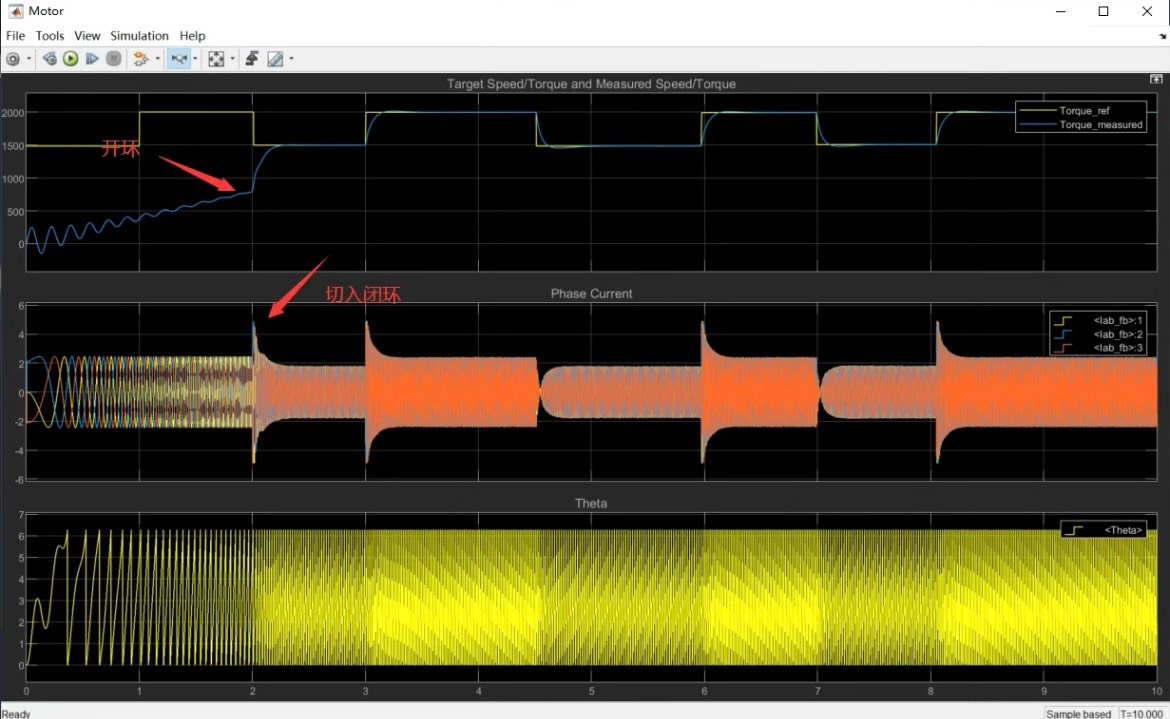
永磁同步电机无位置传感器算法仿真(有报告,教程视频,源代码) 采用低速IF+中高速龙贝格观测器 低速采用流频比IF控制,转速开环,电流闭环,转速和位置角度使用参考转速和计算的参考位置;中高速采用了基于龙贝格观测器的无位置传感器方法。 两种方法在电机转速变化时可自动切换,可实现电机的正常启停。 仿真程序采用离散模型搭建,状态机跳转,可以自动代码生成导出STM32工程文件,下载到板卡运行。 送以下内容 [1]仿真包含和测试报告,具体控制效果看波形,从报告中可以看出实际应用的波形和仿真波形对比,也可以自己修改参数进行优化。 [2]matlab自动代码生成教程视频,教你一步步怎么编辑怎么导出可实际工程应用的 [3]自己导出来的一份STM32的工程源代码,已经上电验证过了,你也可以自己导出。 送参考文献,资料内容具体见下图。
最近在捣鼓永磁同步电机无位置传感器控制,发现低速和高速工况切换真是个头疼的问题。传统的位置传感器不仅增加硬件成本,还容易受干扰,索性直接搞了个IF+龙贝格观测器的组合方案。下面咱们边撸代码边唠嗑,看看这玩意儿怎么玩转电机控制。
低速IF控制就像骑自行车,得先给个初始推力。这里直接上电流闭环,把转速参考值换算成角度增量。看这段核心代码:
// IF控制角度计算
void IF_Angle_Update(float ref_speed) {
static float theta_if;
theta_if += ref_speed * Ts * POLE_PAIRS; // Ts为控制周期
if(theta_if > 2*PI) theta_if -= 2*PI;
current_controller(theta_if); // 电流环注入
}其实就是把转速积分得到角度,像极了用APP控制共享单车起步。但别以为开环就简单,电流环参数调不好照样抖得亲妈都不认识,这里埋个伏笔——后面的观测器会收拾这个烂摊子。
中高速换上龙贝格观测器,这货相当于装了ESP的跑车。核心在于反电动势观测:
// 龙贝格观测器核心片段
void Luenberger_Observer(float i_alpha, float i_beta) {
// 状态方程实现
emf_alpha = (Ld * di_alpha/dt) + Rs*i_alpha - V_alpha + gain*(i_alpha - i_alpha_est);
emf_beta = (Lq * di_beta/dt) + Rs*i_beta - V_beta + gain*(i_beta - i_beta_est);
// 角度提取
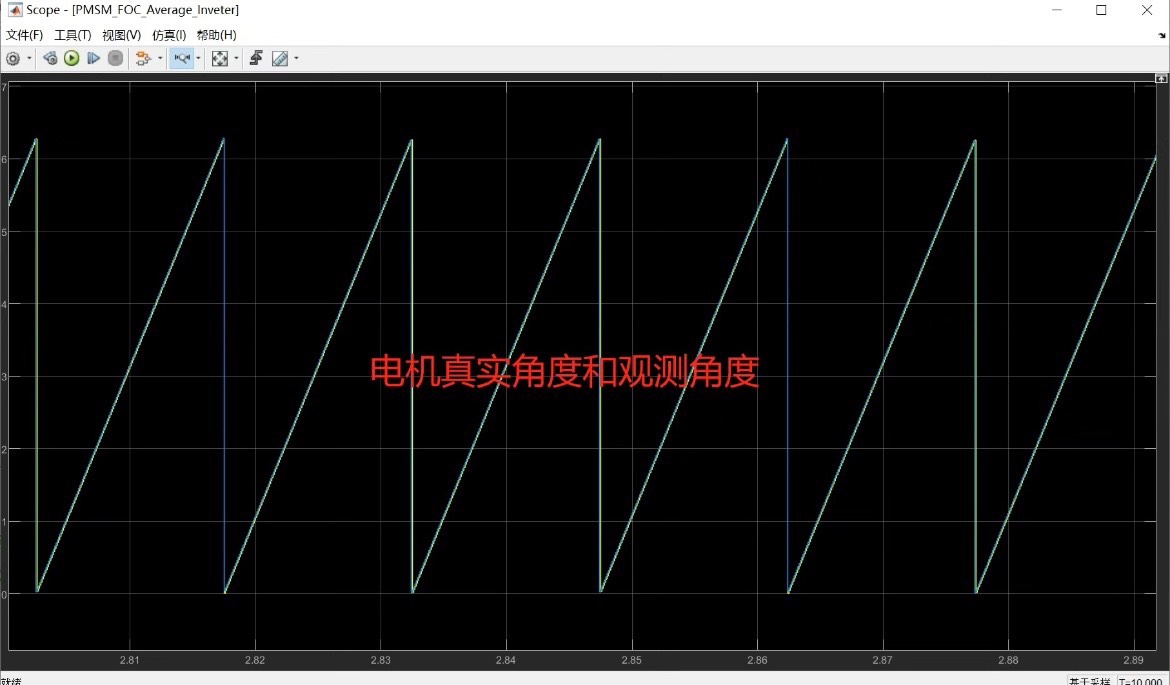
theta_est = atan2(-emf_alpha, emf_beta);
}这里有个坑:增益参数得跟着转速动态调整。实测发现增益值超过0.5后观测角度开始鬼畜,建议从0.3开始试。
永磁同步电机无位置传感器算法仿真(有报告,教程视频,源代码) 采用低速IF+中高速龙贝格观测器 低速采用流频比IF控制,转速开环,电流闭环,转速和位置角度使用参考转速和计算的参考位置;中高速采用了基于龙贝格观测器的无位置传感器方法。 两种方法在电机转速变化时可自动切换,可实现电机的正常启停。 仿真程序采用离散模型搭建,状态机跳转,可以自动代码生成导出STM32工程文件,下载到板卡运行。 送以下内容 [1]仿真包含和测试报告,具体控制效果看波形,从报告中可以看出实际应用的波形和仿真波形对比,也可以自己修改参数进行优化。 [2]matlab自动代码生成教程视频,教你一步步怎么编辑怎么导出可实际工程应用的 [3]自己导出来的一份STM32的工程源代码,已经上电验证过了,你也可以自己导出。 送参考文献,资料内容具体见下图。
自动切换才是真本事,搞了个状态机当裁判:
enum {MODE_IF, MODE_OBSERVER} control_mode;
void Mode_Switch(float speed) {
static uint8_t hold_counter = 0;
if(speed < SWITCH_THRESHOLD) {
if(++hold_counter > HYSTERESIS_CYCLES) {
control_mode = MODE_IF;
}
} else {
hold_counter = 0;
control_mode = MODE_OBSERVER;
}
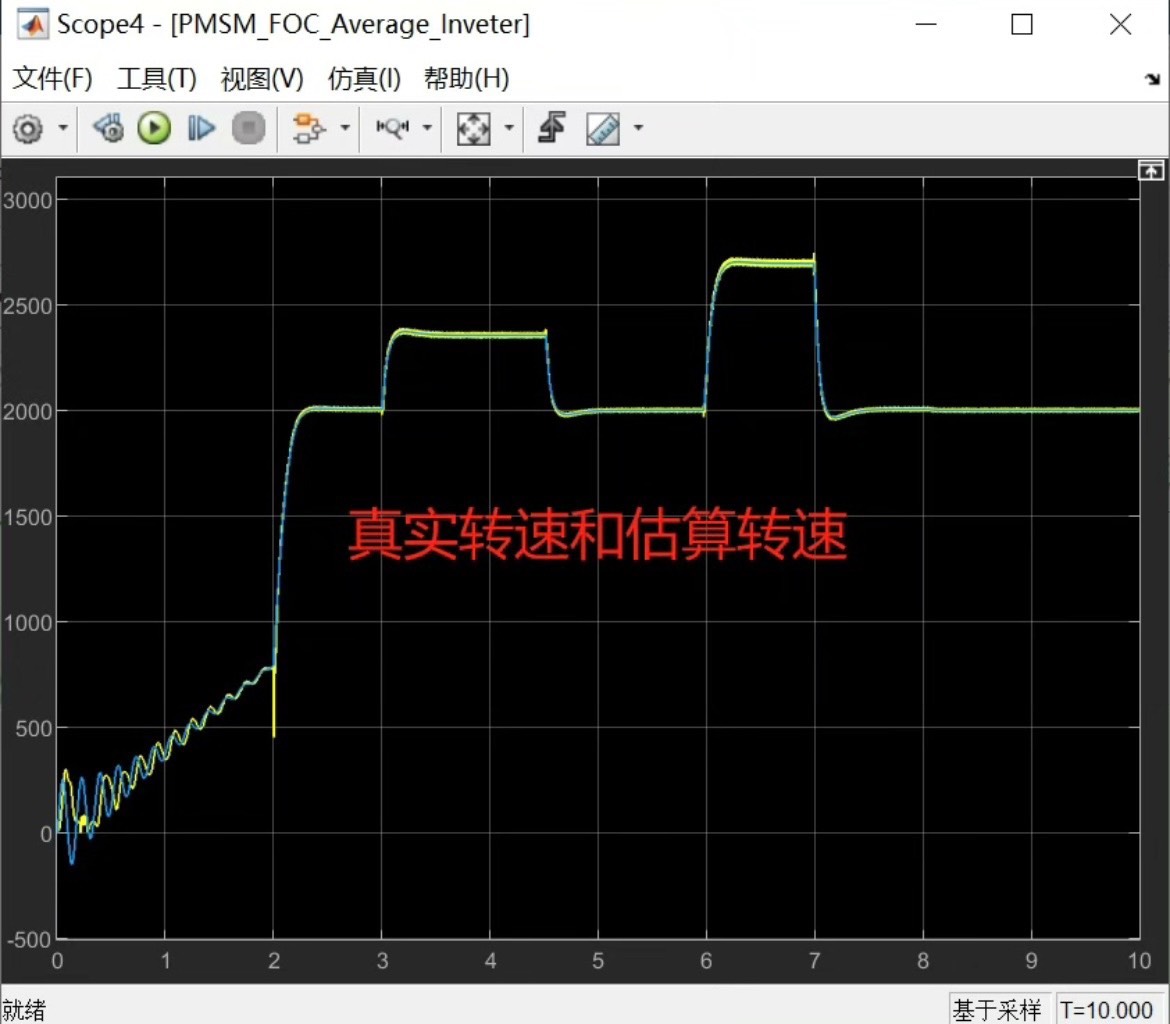
}这里加了滞回计数防震荡,实测切换时电流波动控制在5%以内。有个骚操作:切换瞬间把观测器角度同步给IF控制器,避免角度跳变引发转矩震荡。
自动生成代码的骚操作,Simulink里配置STM32硬件包后,把观测器模块勾选成原子子系统,时钟配置一定要选跟硬件PWM同步。导出时记得勾选"Generate peripheral initialization"选项,不然ADC压根不工作。
测试时发现个魔幻现象:仿真波形美如画,实际电机启动时偶尔抽搐。最后在电流采样电路上抓到元凶——ADC的采样保持时间没配置对,改了个0.5us的延迟立马老实。所以说仿真报告和实测波形对比真是保命符,建议调参时开着示波器边改边看。
整套工程实测能从零速拉到3000rpm不丢步,切换过程肉眼不可见。代码仓库里放了验证过的STM32工程,直接用CubeMX打开就能烧录。懒得自己导代码的兄弟直接下完整包,视频教程里连怎么改PWM死区都演示了。搞这玩意最大的心得就是:电机控制就像谈恋爱,别光看理论数据,得上手调了才知道合不合适。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 9
9 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)