SVPWM 原理解析
本文详细介绍了空间电压矢量脉宽调制(SVPWM)技术的原理与实现。SVPWM通过控制三相逆变器的6个功率管开关状态,合成圆形旋转的空间电压矢量,使电机产生理想圆形磁场。文章首先分析逆变器8种开关状态对应的基本电压矢量,推导相电压公式;然后阐述空间矢量的复平面表示和扇区划分方法;重点讲解了参考矢量的合成原理、作用时间计算及七段式SVPWM实现方案,包括零矢量优化和开关顺序安排。最后总结了SVPWM的
经过一系列的数学变化,终于来到了SVPWM
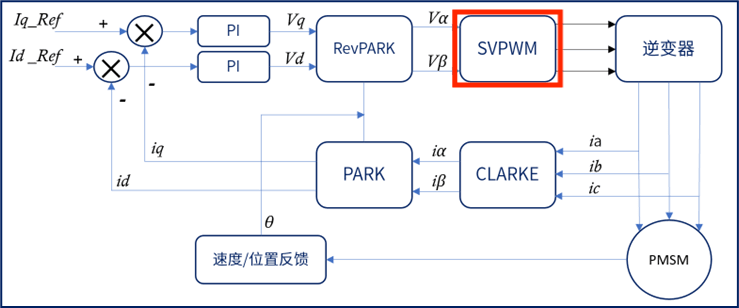
SVPWM (Space Vector Pulse Width Modulation)即:空间电压矢量
通过控制逆变器 6 个功率管的开关状态,合成幅值恒定、角速度匀速旋转的圆形空间电压矢量,让电机产生理想的圆形旋转磁场,实现转矩平稳、高效驱动。
用有限的 8 个基本开关矢量,通过时间加权,逼近任意旋转的参考电压矢量。
一、三相逆变器的开关状态与基本电压矢量
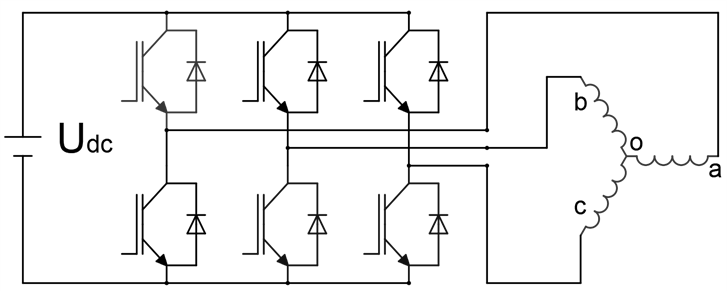
三相逆变器由 3 个独立半桥(A、B、C 相)组成,每个半桥有上下 2 个功率管(MOSFET/IGBT),同一半桥上下管绝对不能同时导通(否则直流母线短路),因此每个半桥仅 2 种合法状态:
定义开关函数 Sx(x=a,b,c):
- Sx=1:该相上桥臂导通,相输出端接直流母线正极 Udc
- Sx=0:该相下桥臂导通,相输出端接直流母线负极(地,0 电位)
3 个半桥共有 2^3=8 种合法状态,对应 8 个基本电压矢量:
| 矢量类型 | 矢量编号 | 开关状态 (Sa,Sb,Sc) | 核心特性 |
|---|---|---|---|
| 非零矢量(6 个) | U1 | 001 | 幅值均为 2/3Udc,在复平面均匀分布,相邻夹角 60° |
| U2 | 010 | ||
| U3 | 011 | ||
| U4 | 100 | ||
| U5 | 101 | ||
| U6 | 110 | ||
| 零矢量(2 个) | U0 | 000 | 幅值为 0,三相输出同电位,电机端电压为 0 |
| U7 | 111 |
二、基本电压矢量的相电压推导
三相电机绕组为星形连接,中性点为 N,且三相绕组电阻相等如下图。我们以非零矢量 U4(100) 为例推导相电压:
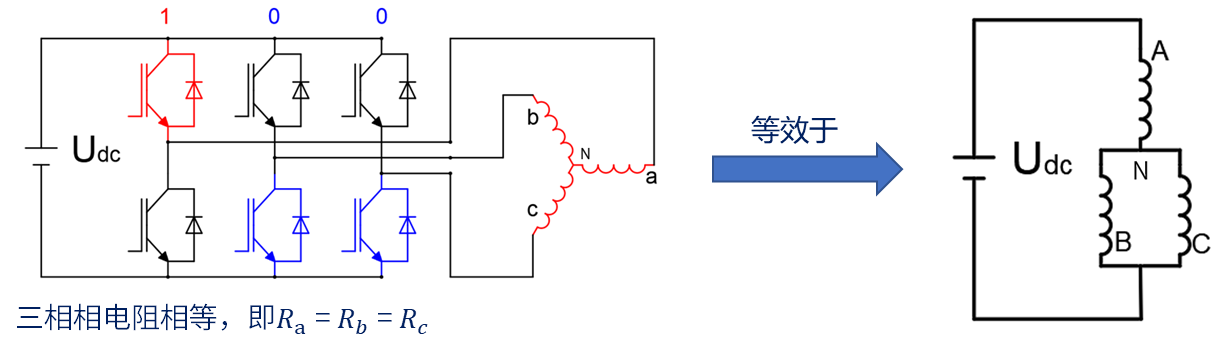
- Sa=1:A 相上管导通,A 端接 Udc
- Sb=0,Sc=0:B、C 相下管导通,B、C 端接 0 电位
- 等效电路:A 相绕组(电阻 R)串联 B、C 相并联绕组(总电阻 R/2),总电阻:

- 总电流::
- A 相相电压:
- B、C 相相电压:
对所有 8 种开关状态做相同推导,得到完整相电压表:
| Sa | Sb | Sc | 矢量符号 | UaN | UbN | UcN |
|---|---|---|---|---|---|---|
| 0 | 0 | 0 | U0 | 0 | 0 | 0 |
| 1 | 0 | 0 | U4 | 2/3Udc | -1/3Udc | −1/3Udc |
| 1 | 1 | 0 | U6 | 1/3Udc | 1/3Udc | −2/3Udc |
| 0 | 1 | 0 | U2 | −1/3Udc | 2/3Udc | −1/3Udc |
| 0 | 1 | 1 | U3 | −2/3Udc | 1/3Udc | 1/3Udc |
| 0 | 0 | 1 | U1 | −1/3Udc | −1/3Udc | 2/3Udc |
| 1 | 0 | 1 | U5 | 1/3Udc | −2/3Udc | 1/3Udc |
| 1 | 1 | 1 | U7 | 0 | 0 | 0 |
关键结论:所有非零矢量的空间幅值均为 2/3Udc,零矢量幅值为 0。
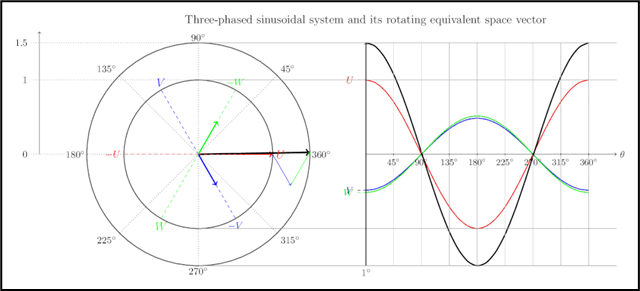
三、空间矢量的复平面表示
通过克拉克变换(Clarke Transform),将三相相电压 UaN,UbN,UcN 变换到 α−β 静止坐标系,得到空间电压矢量:
8 个基本矢量在复平面的分布:
6 个非零矢量:幅值 2/3Udc,角度分别为![]() 将复平面分为 6 个扇区。
将复平面分为 6 个扇区。
2 个零矢量:位于坐标原点,无方向、幅值为 0。
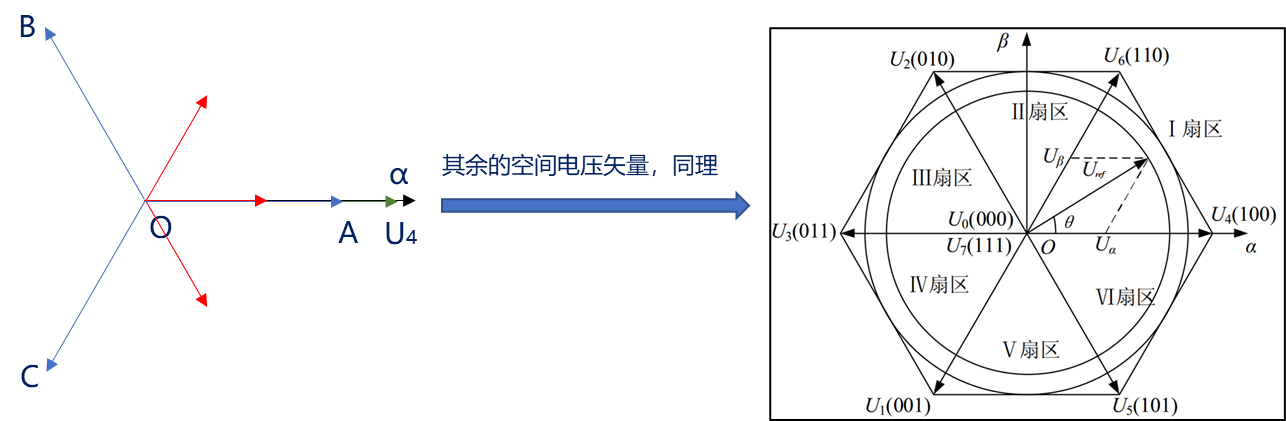
四、扇区判断
6 个非零矢量将 α-β 静止坐标系的复平面,均匀分成了 6 个 60° 的扇区)。要合成任意旋转的参考电压矢量 Uref,必须先确定它落在哪个扇区,才能选择该扇区对应的 2 个相邻非零矢量,进行后续的作用时间计算。
首先,定义 3 个中间变量 A、B、C ,对应 α-β 平面上 3 条扇区分界线(其实是按照数学逻辑推导最后总结规律,得到三个变量可以概括扇区规律,下面的矢量合成也是):
- A=0:对应 α 轴(0°/180° 分界线)
- B=0:对应 60°/240° 分界线
- C=0:对应 120°/300° 分界线
3 条线将平面分成 6 个扇区,我们通过 A、B、C 的正负(>0 取 1,<0 取 0),
计算扇区编号 N:N=4C+2B+A
扇区与非零矢量的对应关系
| 扇区编号 | 相邻非零矢量 1 | 相邻非零矢量 2 |
|---|---|---|
| 1 | U4(100) | U6(110) |
| 2 | U6(110) | U2(010) |
| 3 | U2(010) | U3(011) |
| 4 | U3(011) | U1(001) |
| 5 | U1(001) | U5(101) |
| 6 | U5(101) | U4(100) |
五、参考矢量的合成
在一个扇区内,相邻两个电压矢量以及零矢量,按伏秒平衡的原则来合成该扇区内的任意电压矢量 ,即:
其中:总时间等于采样周期,
、
为非零矢量作用时间,
为零矢量作用时间。
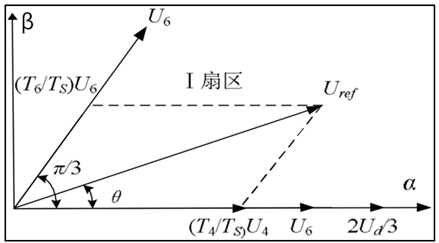
假设在扇区一,那么此时等式为:
可得
计算六个扇区再总结规律最后可得,通用作用时间计算:
六、零矢量的作用与七段式 SVPWM
1. 零矢量的作用
- 填充剩余时间:满足 Tx+Ty+T0=Ts,保证平均电压等于参考电压。
- 优化开关次数:通过合理分配 U0(000) 和 U7(111) 的时间,减少功率管的开关次数,降低开关损耗。
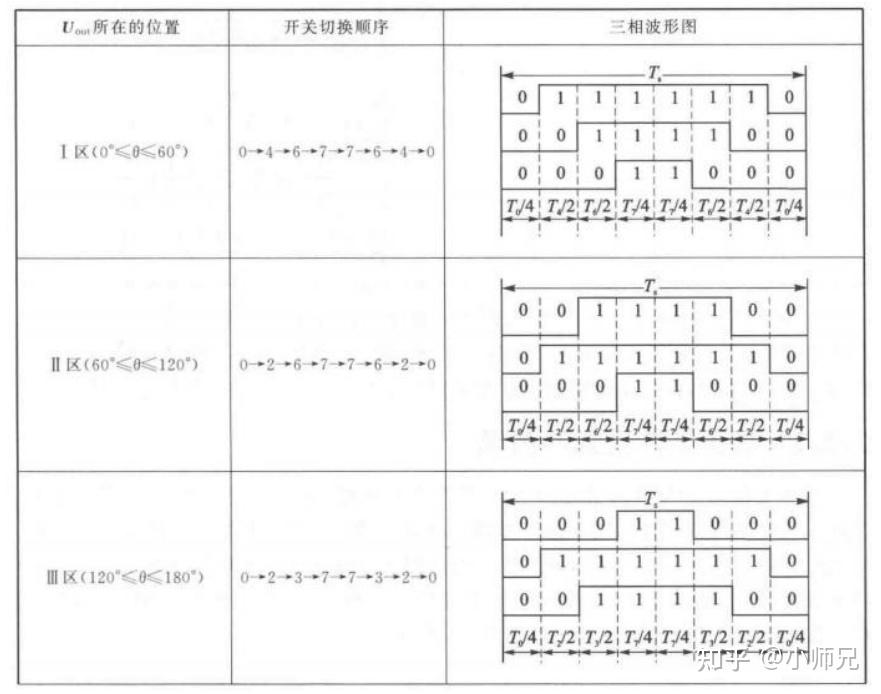
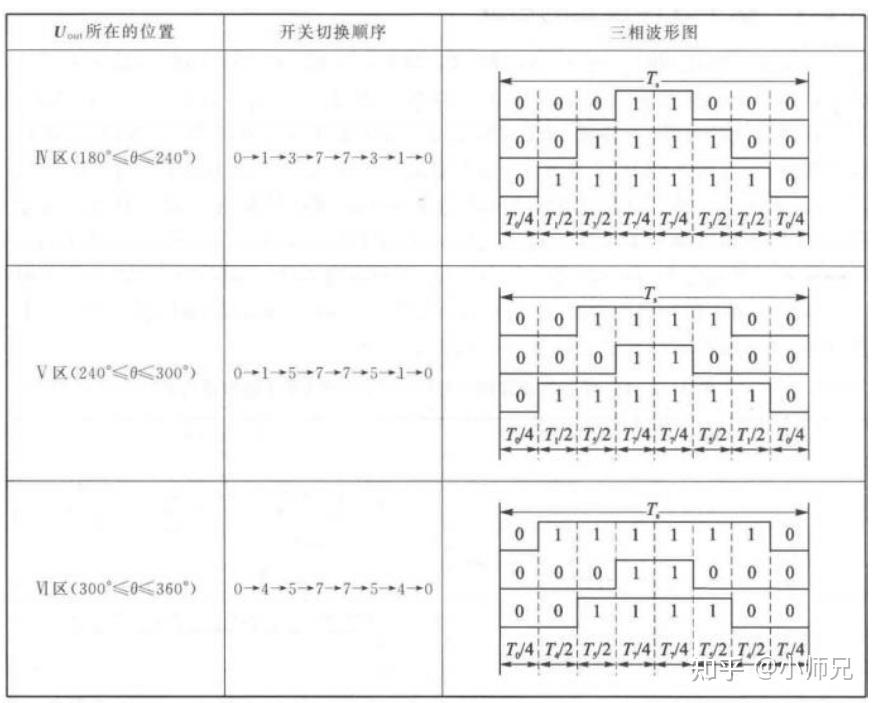
2. 七段式 SVPWM
将一个 PWM 周期分为 7 段,零矢量拆分为两段放在周期首尾,中间插入非零矢量,实现对称开关、最小开关次数(每个周期仅 4 次开关动作),大幅降低谐波和损耗。以第 1 扇区为例,开关状态顺序:
七、SVPWM 的实现步骤
- 坐标变换:将三相电压 / 电流从 abc 坐标系变换到 α−β 静止坐标系,得到 Uα,Uβ。
- 扇区判断:根据 Uα,Uβ 计算参考矢量角度,判断其所在扇区。
- 作用时间计算:根据扇区,计算两个非零矢量和零矢量的作用时间 Tx,Ty,T0。
- PWM 生成:将作用时间转换为定时器比较值,生成 6 路带死区的 PWM 信号,控制逆变器功率管。
- 零矢量优化:采用七段式 SVPWM,优化开关顺序,降低损耗。
参考资料
慧驱动电机资料
正点原子FOC部分(图)
袁雷的现代永磁同步电机蓝皮书
详细的公式推导博客:
参考链接: https://zhuanlan.zhihu.com/p/414721065
SVPWM算法详解参考链接:https://blog.csdn.net/michaelf/article/details/94013805

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 10
10 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)