STM32:letter shell移植,串口交互,中断驱动
letter shell是可以在单片机上运行的交互库,可以让我们像在linux下使用shell一样使用单片机。我个人认为在单片机上使用shell,更大的意义是通过它帮我们快速实现一个好看点的简易的上位机。我个人认为如果是在freertos下,也还是使用中断方式驱动比较好,但是要做好临界保护。其实,因为shell的数据是按一个键就会发送一个命令,所以使用单字节中断的方式比较好,使用dma就有点脱裤子
前言
letter shell是可以在单片机上运行的交互库,可以让我们像在linux下使用shell一样使用单片机。
我个人认为在单片机上使用shell,更大的意义是通过它帮我们快速实现一个好看点的简易的上位机。
一、Letter Shell源码
letter shell 源码
作者更新到了3.2,如果是使用2.X的版本,他的read和write有所不同。
二、使用单字节中断
使用单字节中断方式驱动shell函数,接收串口数据。
cubemx只需开启串口中断即可。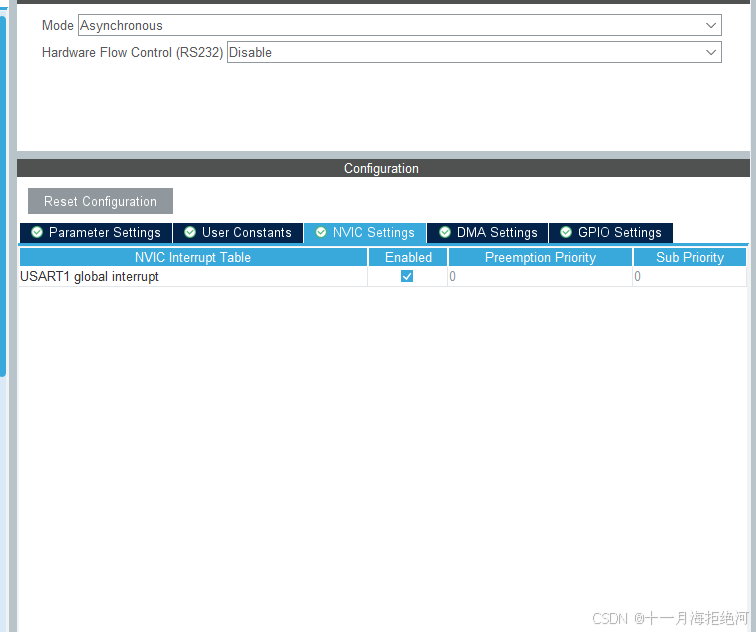
1.shell移植
1.新建Shell目录。
2.把letter-shell/src下的文件全部复制到新建的Shell目录中。
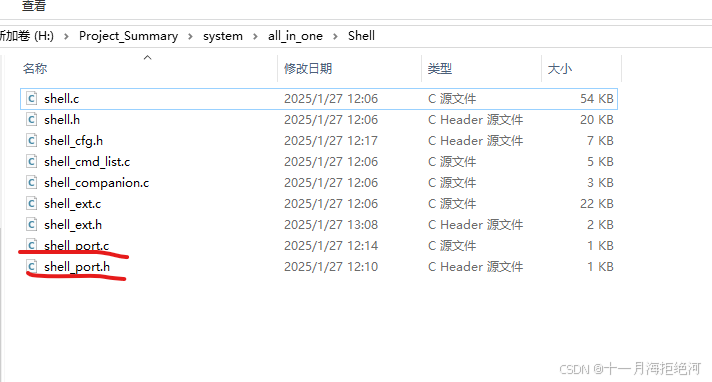
3.新建两个文件shell_port.c,shell_port.h。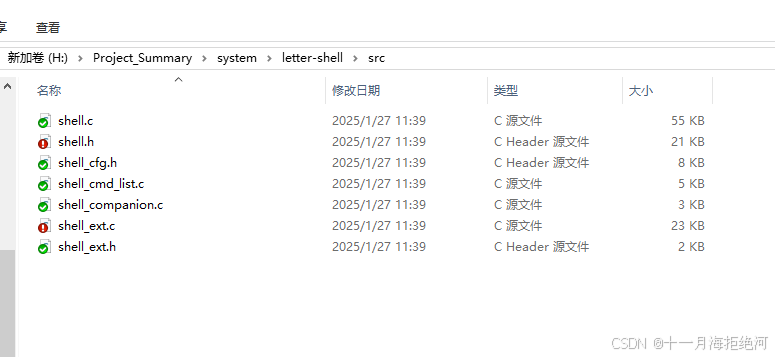
4.在shell_port.c中完成init,read,write函数的实现。
如果是用轮询或者rtos的,需要实现read函数,我们这里因为使用的中断,可以没有read的实现。
shell_port.c
#include "shell_port.h"
#include "usart.h"
Shell shell;
char shell_buffer[512];
signed short shell_write(char *data, unsigned short len)
{
HAL_UART_Transmit(&huart1, (uint8_t *)data, len, 1000);
return len;
}
//可以没有
signed short shell_read(char *data, unsigned short len)
{
if (HAL_UART_Receive(&huart1, (uint8_t *)data, len, 1000) == HAL_OK)
{
return len;
}
return 0;
}
void shell_port_init(void)
{
//可以没有
shell.write = shell_write;
//
shell.read = shell_read;
shellInit(&shell, shell_buffer, 512);
}
shell_port.h
#pragma once
#include "shell.h"
extern Shell shell;
void shell_port_init(void);
5.shell_cfg.h
将SHELL_TASK_WHILE关闭
/**
* @file shell_cfg.h
* @author Letter (nevermindzzt@gmail.com)
* @brief shell config
* @version 3.0.0
* @date 2019-12-31
*
* @copyright (c) 2019 Letter
*
*/
#ifndef __SHELL_CFG_H__
#define __SHELL_CFG_H__
#ifdef SHELL_CFG_USER
#include SHELL_CFG_USER
#endif
#ifndef SHELL_TASK_WHILE
/**
* @brief 是否使用默认shell任务while循环
* 使能此宏,则`shellTask()`函数会一直循环读取输入,一般使用操作系统建立shell
* 任务时使能此宏,关闭此宏的情况下,一般适用于无操作系统,在主循环中调用`shellTask()`
*/
#define SHELL_TASK_WHILE 0
#endif /** SHELL_TASK_WHILE */
#ifndef SHELL_USING_CMD_EXPORT
/**
* @brief 是否使用命令导出方式
* 使能此宏后,可以使用`SHELL_EXPORT_CMD()`等导出命令
* 定义shell命令,关闭此宏的情况下,需要使用命令表的方式
*/
#define SHELL_USING_CMD_EXPORT 1
#endif /** SHELL_USING_CMD_EXPORT */
#ifndef SHELL_USING_COMPANION
/**
* @brief 是否使用shell伴生对象
* 一些扩展的组件(文件系统支持,日志工具等)需要使用伴生对象
*/
#define SHELL_USING_COMPANION 0
#endif /** SHELL_USING_COMPANION */
#ifndef SHELL_SUPPORT_END_LINE
/**
* @brief 支持shell尾行模式
*/
#define SHELL_SUPPORT_END_LINE 0
#endif /** SHELL_SUPPORT_END_LINE */
#ifndef SHELL_HELP_LIST_USER
/**
* @brief 是否在输出命令列表中列出用户
*/
#define SHELL_HELP_LIST_USER 0
#endif /** SHELL_HELP_LIST_USER */
#ifndef SHELL_HELP_LIST_VAR
/**
* @brief 是否在输出命令列表中列出变量
*/
#define SHELL_HELP_LIST_VAR 0
#endif /** SHELL_HELP_LIST_VAR */
#ifndef SHELL_HELP_LIST_KEY
/**
* @brief 是否在输出命令列表中列出按键
*/
#define SHELL_HELP_LIST_KEY 0
#endif /** SHELL_HELP_LIST_KEY */
#ifndef SHELL_HELP_SHOW_PERMISSION
/**
* @brief 是否在输出命令列表中展示命令权限
*/
#define SHELL_HELP_SHOW_PERMISSION 1
#endif /** SHELL_HELP_SHOW_PERMISSION */
#ifndef SHELL_ENTER_LF
/**
* @brief 使用LF作为命令行回车触发
* 可以和SHELL_ENTER_CR同时开启
*/
#define SHELL_ENTER_LF 1
#endif /** SHELL_ENTER_LF */
#ifndef SHELL_ENTER_CR
/**
* @brief 使用CR作为命令行回车触发
* 可以和SHELL_ENTER_LF同时开启
*/
#define SHELL_ENTER_CR 1
#endif /** SHELL_ENTER_CR */
#ifndef SHELL_ENTER_CRLF
/**
* @brief 使用CRLF作为命令行回车触发
* 不可以和SHELL_ENTER_LF或SHELL_ENTER_CR同时开启
*/
#define SHELL_ENTER_CRLF 0
#endif /** SHELL_ENTER_CRLF */
#ifndef SHELL_EXEC_UNDEF_FUNC
/**
* @brief 使用执行未导出函数的功能
* 启用后,可以通过`exec [addr] [args]`直接执行对应地址的函数
* @attention 如果地址错误,可能会直接引起程序崩溃
*/
#define SHELL_EXEC_UNDEF_FUNC 0
#endif /** SHELL_EXEC_UNDEF_FUNC */
#ifndef SHELL_PARAMETER_MAX_NUMBER
/**
* @brief shell命令参数最大数量
* 包含命令名在内,超过16个参数并且使用了参数自动转换的情况下,需要修改源码
*/
#define SHELL_PARAMETER_MAX_NUMBER 8
#endif /** SHELL_PARAMETER_MAX_NUMBER */
#ifndef SHELL_HISTORY_MAX_NUMBER
/**
* @brief 历史命令记录数量
*/
#define SHELL_HISTORY_MAX_NUMBER 5
#endif /** SHELL_HISTORY_MAX_NUMBER */
#ifndef SHELL_DOUBLE_CLICK_TIME
/**
* @brief 双击间隔(ms)
* 使能宏`SHELL_LONG_HELP`后此宏生效,定义双击tab补全help的时间间隔
*/
#define SHELL_DOUBLE_CLICK_TIME 200
#endif /** SHELL_DOUBLE_CLICK_TIME */
#ifndef SHELL_QUICK_HELP
/**
* @brief 快速帮助
* 作用于双击tab的场景,当使能此宏时,双击tab不会对命令进行help补全,而是直接显示对应命令的帮助信息
*/
#define SHELL_QUICK_HELP 1
#endif /** SHELL_QUICK_HELP */
#ifndef SHELL_KEEP_RETURN_VALUE
/**
* @brief 保存命令返回值
* 开启后会默认定义一个`RETVAL`变量,会保存上一次命令执行的返回值,可以在随后的命令中进行调用
* 如果命令的`SHELL_CMD_DISABLE_RETURN`标志被设置,则该命令不会更新`RETVAL`
*/
#define SHELL_KEEP_RETURN_VALUE 0
#endif /** SHELL_KEEP_RETURN_VALUE */
#ifndef SHELL_MAX_NUMBER
/**
* @brief 管理的最大shell数量
*/
#define SHELL_MAX_NUMBER 5
#endif /** SHELL_MAX_NUMBER */
#ifndef SHELL_PRINT_BUFFER
/**
* @brief shell格式化输出的缓冲大小
* 为0时不使用shell格式化输出
*/
#define SHELL_PRINT_BUFFER 128
#endif /** SHELL_PRINT_BUFFER */
#ifndef SHELL_SCAN_BUFFER
/**
* @brief shell格式化输入的缓冲大小
* 为0时不使用shell格式化输入
* @note shell格式化输入会阻塞shellTask, 仅适用于在有操作系统的情况下使用
*/
#define SHELL_SCAN_BUFFER 0
#endif /** SHELL_SCAN_BUFFER */
#ifndef SHELL_GET_TICK
/**
* @brief 获取系统时间(ms)
* 定义此宏为获取系统Tick,如`HAL_GetTick()`
* @note 此宏不定义时无法使用双击tab补全命令help,无法使用shell超时锁定
*/
#define SHELL_GET_TICK() 0
#endif /** SHELL_GET_TICK */
#ifndef SHELL_USING_LOCK
/**
* @brief 使用锁
* @note 使用shell锁时,需要对加锁和解锁进行实现
*/
#define SHELL_USING_LOCK 0
#endif /** SHELL_USING_LOCK */
#ifndef SHELL_MALLOC
/**
* @brief shell内存分配
* shell本身不需要此接口,若使用shell伴生对象,需要进行定义
*/
#define SHELL_MALLOC(size) 0
#endif /** SHELL_MALLOC */
#ifndef SHELL_FREE
/**
* @brief shell内存释放
* shell本身不需要此接口,若使用shell伴生对象,需要进行定义
*/
#define SHELL_FREE(obj) 0
#endif /** SHELL_FREE */
#ifndef SHELL_SHOW_INFO
/**
* @brief 是否显示shell信息
*/
#define SHELL_SHOW_INFO 1
#endif /** SHELL_SHOW_INFO */
#ifndef SHELL_CLS_WHEN_LOGIN
/**
* @brief 是否在登录后清除命令行
*/
#define SHELL_CLS_WHEN_LOGIN 1
#endif /** SHELL_CLS_WHEN_LOGIN */
#ifndef SHELL_DEFAULT_USER
/**
* @brief shell默认用户
*/
#define SHELL_DEFAULT_USER "letter"
#endif /** SHELL_DEFAULT_USER */
#ifndef SHELL_DEFAULT_USER_PASSWORD
/**
* @brief shell默认用户密码
* 若默认用户不需要密码,设为""
*/
#define SHELL_DEFAULT_USER_PASSWORD "123456"
#endif /** SHELL_DEFAULT_USER_PASSWORD */
#ifndef SHELL_LOCK_TIMEOUT
/**
* @brief shell自动锁定超时
* shell当前用户密码有效的时候生效,超时后会自动重新锁定shell
* 设置为0时关闭自动锁定功能,时间单位为`SHELL_GET_TICK()`单位
* @note 使用超时锁定必须保证`SHELL_GET_TICK()`有效
*/
#define SHELL_LOCK_TIMEOUT 0 * 60 * 1000
#endif /** SHELL_LOCK_TIMEOUT */
#ifndef SHELL_USING_FUNC_SIGNATURE
/**
* @brief 使用函数签名
* 使能后,可以在声明命令时,指定函数的签名,shell 会根据函数签名进行参数转换,
* 而不是自动判断参数的类型,如果参数和函数签名不匹配,会停止执行命令
*/
#define SHELL_USING_FUNC_SIGNATURE 0
#endif /** SHELL_USING_FUNC_SIGNATURE */
#ifndef SHELL_SUPPORT_ARRAY_PARAM
/**
* @brief 支持数组参数
* 使能后,可以在命令中使用数组参数,如`cmd [1,2,3]`
* 需要使能 `SHELL_USING_FUNC_SIGNATURE` 宏,并且配置 `SHELL_MALLOC`, `SHELL_FREE`
*/
#define SHELL_SUPPORT_ARRAY_PARAM 0
#endif /** SHELL_SUPPORT_ARRAY_PARAM */
#endif
6.在shell_ext.h中解决报错(因为使用了size_t)
#include “stm32f4xx_hal.h”
shell的移植就算是完成了。
2.串口配置
1.开始串口中断,设置串口接收字节地址。
main.c
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_USB_DEVICE_Init();
/* USER CODE BEGIN 2 */
HAL_UART_Receive_IT(&huart1,&uart1_recv_byte,1);
shell_port_init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
2.实现串口中断回调函数
stm32f4xx_it.c
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1)
{
shellHandler(&shell,uart1_recv_byte);
HAL_UART_Receive_IT(&huart1,&uart1_recv_byte,1);
}
}
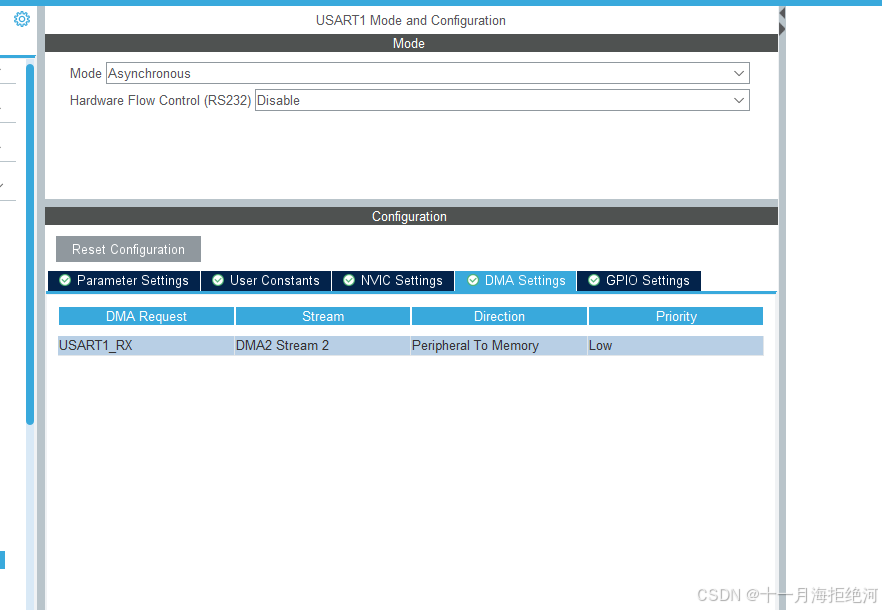
三.使用DMA
使用dma和idle中断的方式。
具体原理看我的这篇
STM32: USART + DMA + Idle 中断 + Modbus 通用解析函数
注意,经过测试,上下左右键这种复合ascii键无法使用,和git bash的用起来差不多
1.cubemx配置
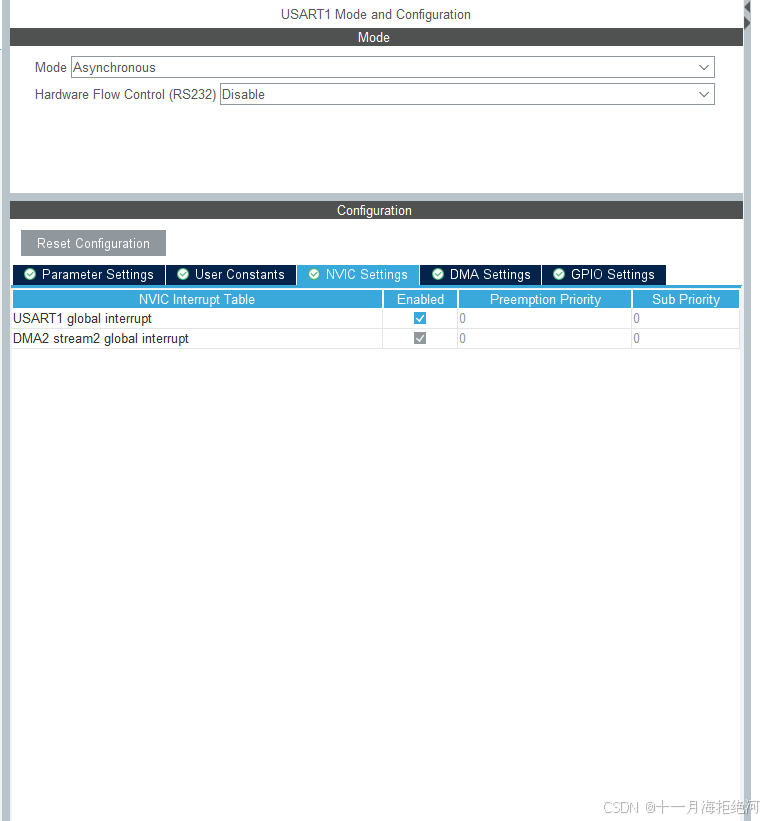
2.代码
shell部分和单字节中断是一样的。
主要是要在初始化串口时,开始dma idle中断。并且在每次串口空闲中断中调用shellhandler。
usart.c
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
Uart_Str.Analysis_function = uart_callback;
HAL_UARTEx_ReceiveToIdle_DMA(&huart1,Uart_Str.Uart_RecvBuff,sizeof(Uart_Str.Uart_RecvBuff) - 1);
/* USER CODE END USART1_Init 2 */
}
static void uart_callback(uint8_t len,uint8_t *data)
{
shellHandler(&shell, *data);
}
stm32f4xx_it.c
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{
if(huart->Instance == USART1)
{
Uart_Str.Analysis_function(Size,Uart_Str.Uart_RecvBuff);
HAL_UARTEx_ReceiveToIdle_DMA(&huart1,Uart_Str.Uart_RecvBuff,sizeof(Uart_Str.Uart_RecvBuff) - 1);
}
}
main函数中就不需要一直轮询shelltask了。
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
MX_USB_DEVICE_Init();
/* USER CODE BEGIN 2 */
shell_port_init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
总结
我个人认为如果是在freertos下,也还是使用中断方式驱动比较好,但是要做好临界保护。
其实,因为shell的数据是按一个键就会发送一个命令,所以使用单字节中断的方式比较好,使用dma就有点脱裤子放屁了。只有在复制整条命令时,dma会相对有点优势。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 24
24 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)