PLC1200简单新建项目并建立一个轴的初始化及正反转设置(只是完成轴的初始化结果是无法运动的),以及新建时没有控制器可以选择如何解决?
在实际的工程应用中,通常会编写PLC程序来控制轴的运动,包括设定运动的速度、加减速度、方向等参数,从而实现精准的运动控制。
·
使用工具:PLC1200,网线(直连设备)
使用软件:博图V17
1、新建项目。

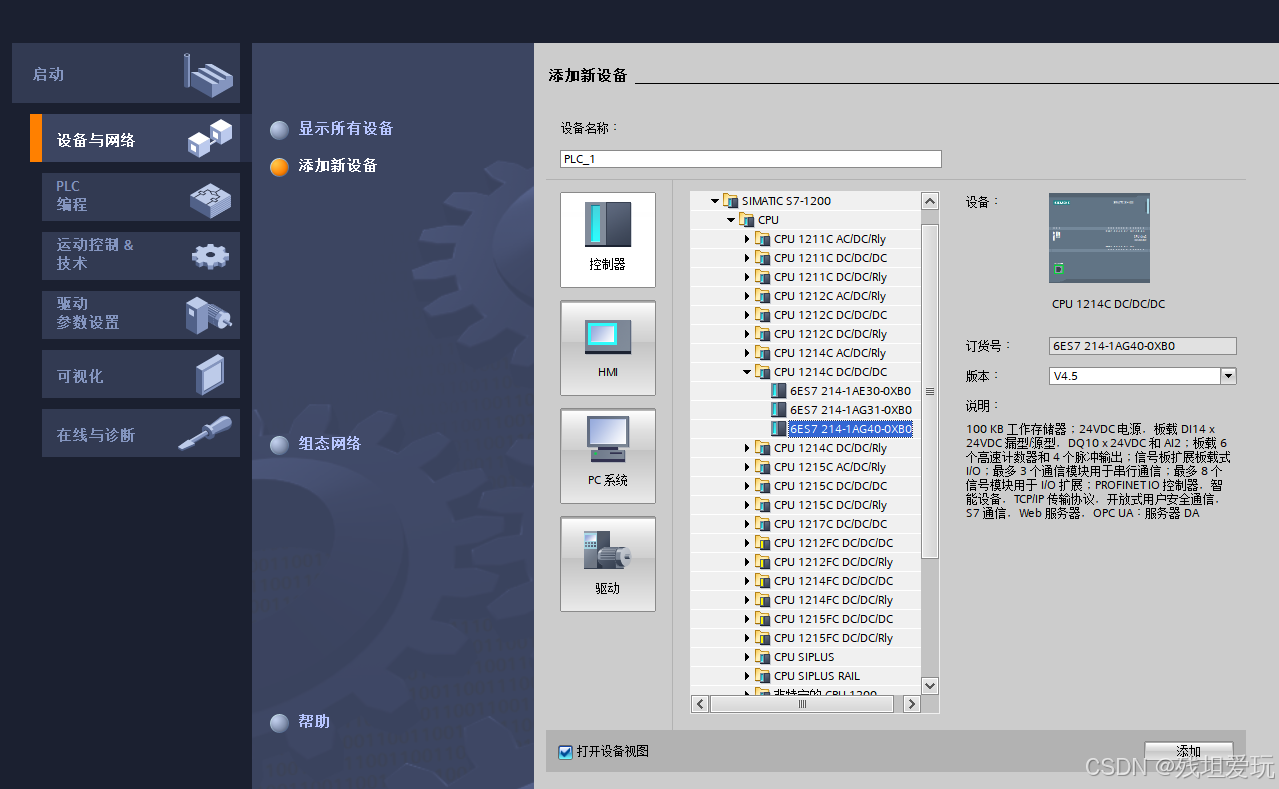
2、选择组态设备。

3、选择添加新设备——控制器——SIMATIC S7-1200——CPU——CPU 1214C DC/DC/DC——6ES7 214-1AG40-0XB0(根据你具体设备选择不一定和我一样)。
?!!注意:如果此处你没有控制器或者其他拓展模块,你要考虑一下是否安装包不完整或者是安装过程中遗漏掉一个安装程序。
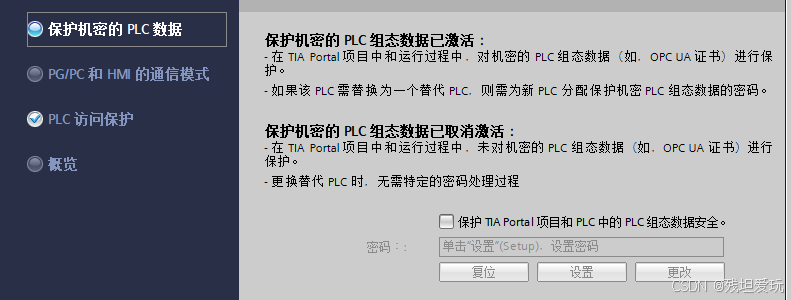
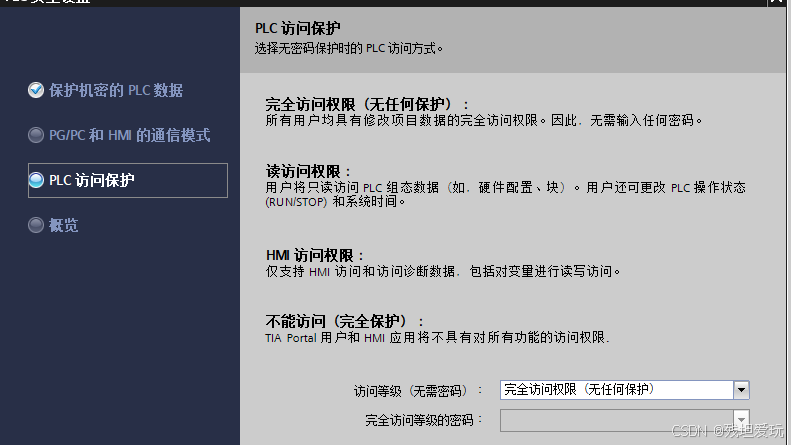
4、取消保护机密的PLC数据和设置PLC访问保护为完全访问权限(无任何保护)。
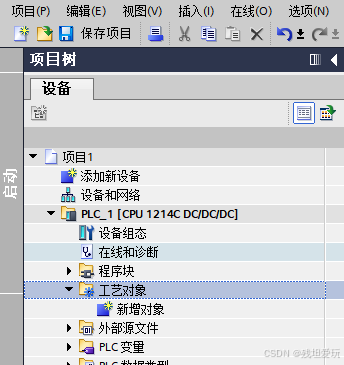
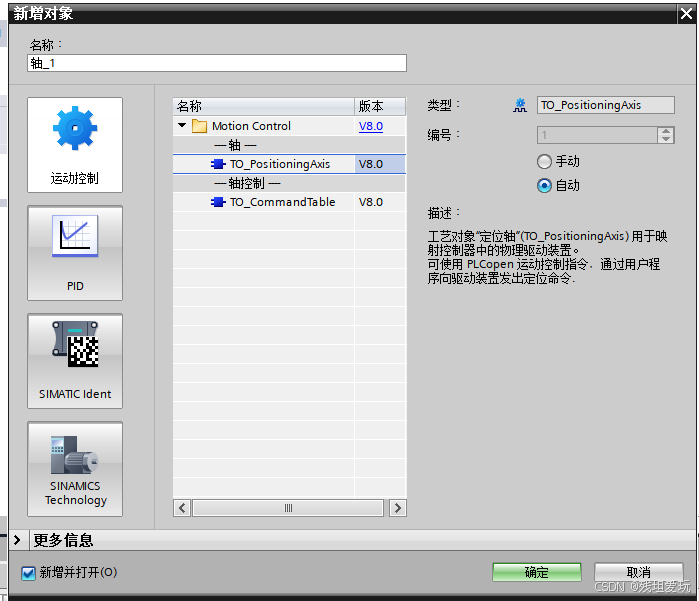
5、上述操作完成后,找到工艺对象——新建对象——轴To_PositioningAxis——确定。
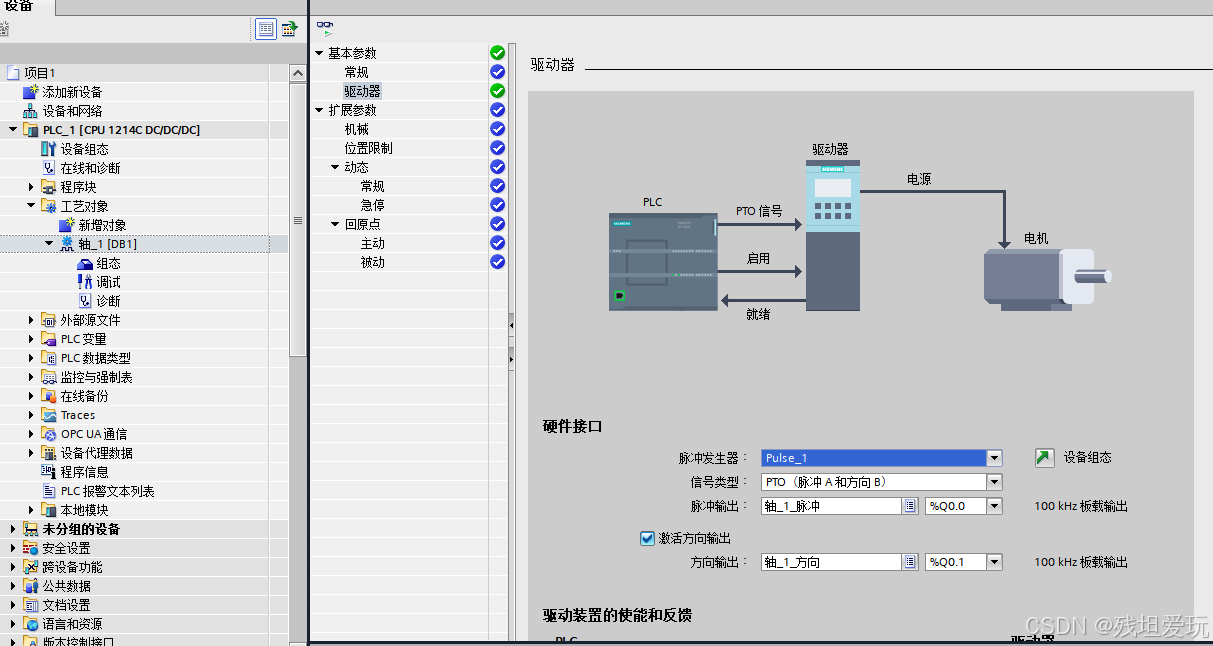
6、设置驱动器选择Pulse_1,设置机械,电机每转脉冲数和位移(其他暂时默认即可)。

7、找到PLC变量,新建变量正转、反转,存储在内部%M1000.0和%M1000.1。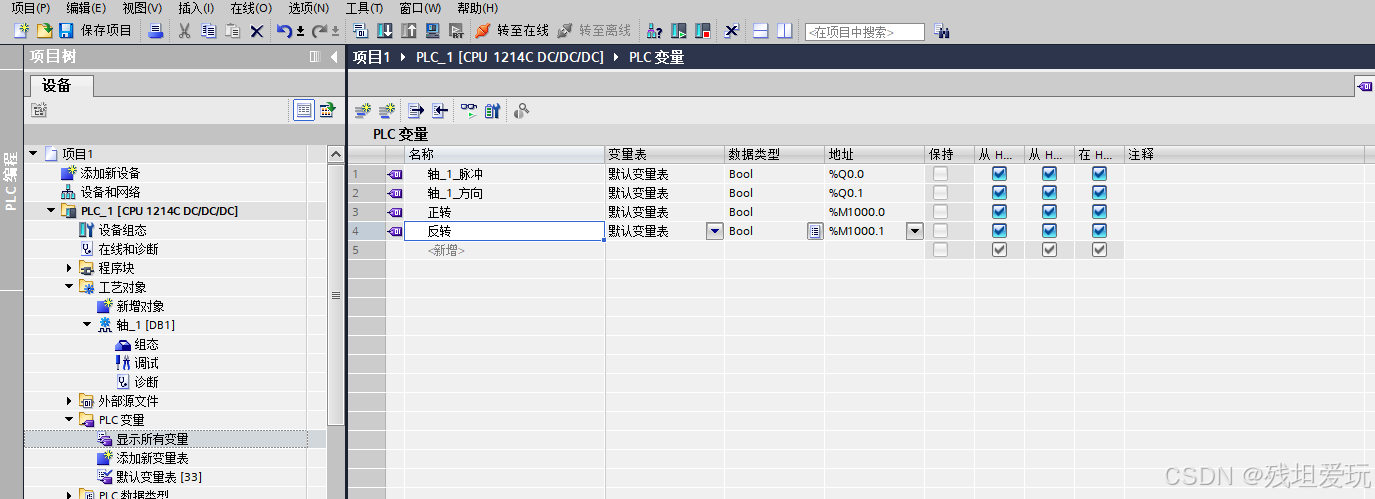
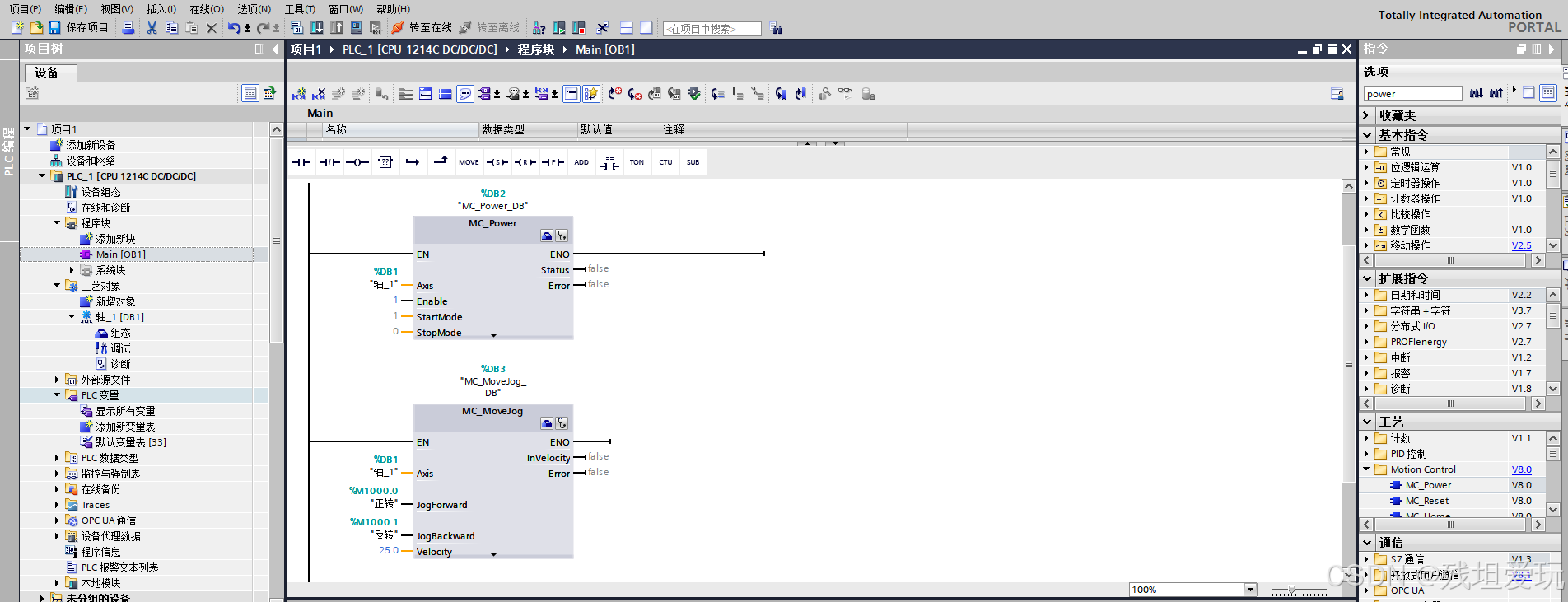
8、在右边搜索Power、Jog,找到工艺模块里MC_Power和MC_MoveJog两个模块拖出来并设置参数。
PLC完成轴的初始化设置后,轴本身是无法运动的,需要结合具体的编程逻辑和实际设备的联动才能实现控制运动。在实际的工程应用中,通常会编写PLC程序来控制轴的运动,包括设定运动的速度、加减速度、方向等参数,从而实现精准的运动控制。随着工业自动化的发展,PLC在控制运动方面扮演着非常重要的角色。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 15
15 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)