声源定位跟踪系统
本设计采用STM32作为硬件平台设计了一个声源定位跟踪系统,能实现对声源进行实时定位跟踪并反馈声源的基本信息等功能。该系统将音频信号转换为电信号,由MAX9814放大器将麦克风输出的电信号放大后传输到芯片进行处理。系统的核心处理芯片是STM32F407芯片,通过该芯片内部的ADC模块实现对麦克风阵列信号的实时采集,其较高的采样频率可以使非同步采样带来的误差被忽略;本系统的核心算法是时延估计的广义互
1.设计方案工作原理
为了实现声源的定位和跟踪,同时最大效率地保证声源定位和声源跟踪的准确性,本设计制作的声源定位跟踪系统,通过麦克风接收声源信号,主控芯片STM32对信号处理计算,使定位模块,显示模块,跟踪模块高效地结合,来完成声源的定位跟踪。
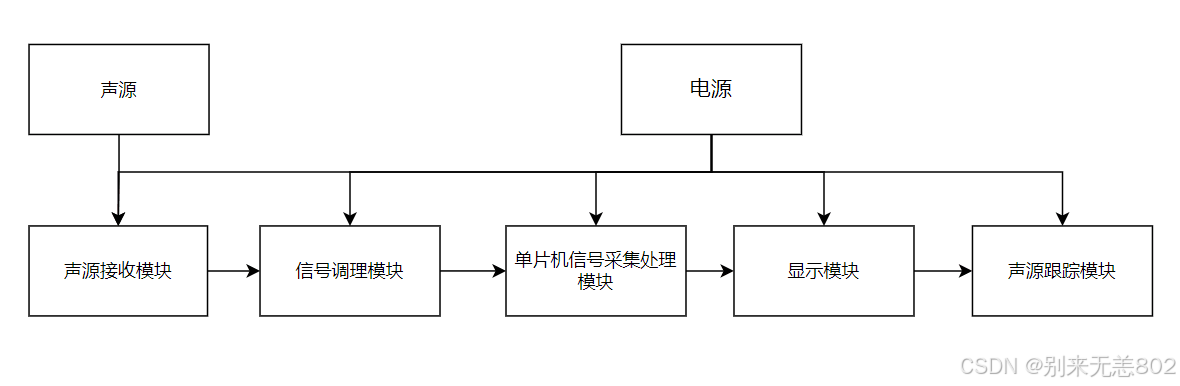
本设计的系统结构框图如图1所示,锂电池和稳压电路组成的电源模块能够提供稳定的3.3V和5V电压,保证系统各个模块的正常运行。主控模块由以STM32F407为核心的最小系统板组成,同时负责信号的采集和数据处理;声源接收模块把音频信号转换为电信号,经过信号调理模块并把信号放大,使其达到单片机ADC 参考电压范围;单片机对采样后的数据进行处理,将定位结果发送到显示模块,当声源位置发生变化时,舵机根据主控芯片发送的PWM波转动声源跟踪模块,使激光笔对准声源,并持续跟踪。
2.核心部件电路设计
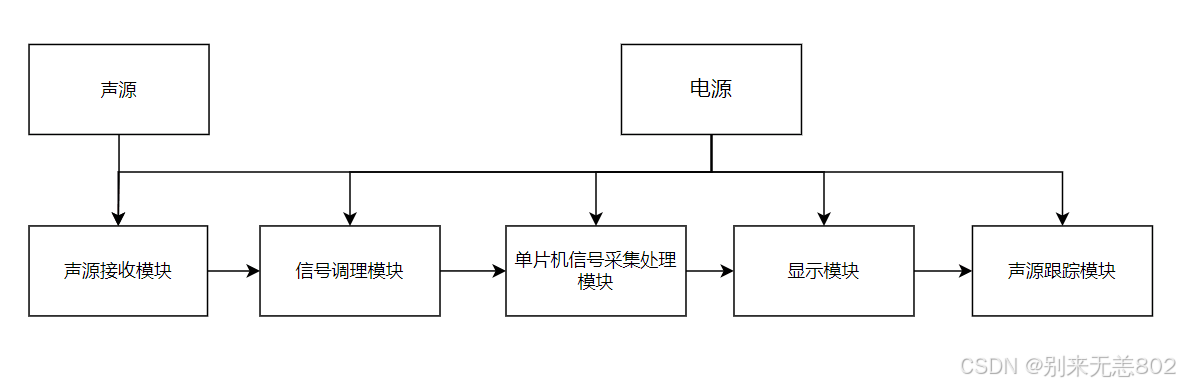
本设计系统硬件框图如图2所示。其系统硬件主要由稳压电路、STM32主控制单元、信号调理电路、电源、OLED显示模块、舵机驱动控制模块等构成。各模块相互协作,实现声源定位跟踪的需求。
2.1 电源稳压电路
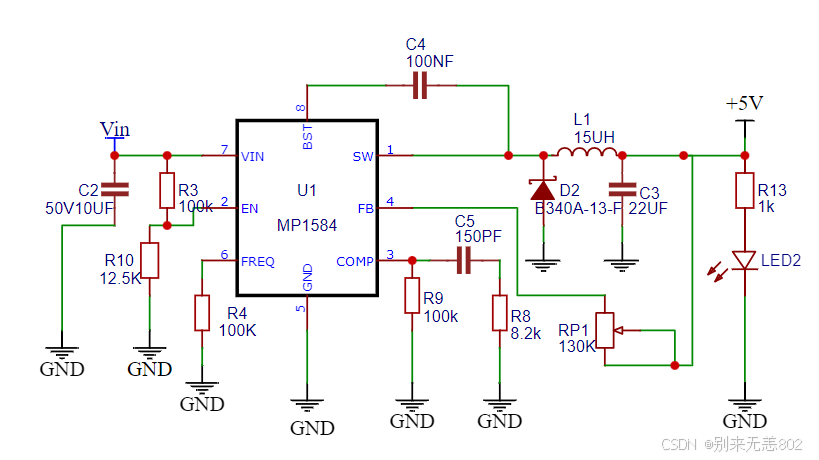
电源稳压模块采用MP1584为核心的稳压电路能够稳定的提供5v的稳定电压,为单片机和舵机模块等进行供电,保证系统各个模块的正常运作,确保定位和跟踪的准确性。稳压电路图如图4所示。
2.2 麦克风信号接收调理电路
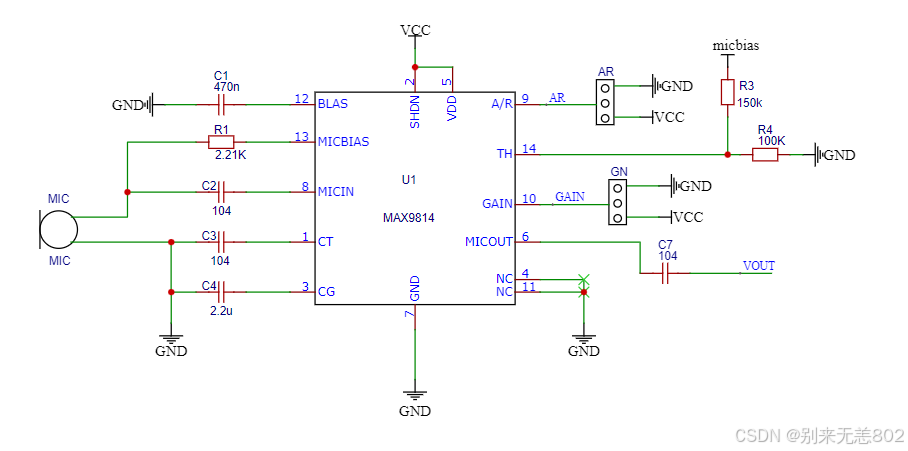
考虑到单片机 ADC 参考电压范围和麦克风原始信号幅值大小,系统设计了放大电路对麦克风接收信号进行调理,采用以MAX9814芯片为核心的麦克风放大接收模块,其电路图如图5所示。
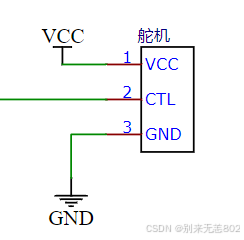
2.3 声源跟踪电路
声源跟踪电路以舵机为核心。可以给舵机输入不同的信号,来控制其旋转到不同的角度。舵机接收的是PWM信号,当信号进入内部电路产生一个偏置电压,触发电机通过减速齿轮带动电位器移动,使电压差为零时,电机停转,给舵机一个特定的PWM信号,舵机就能旋转到指定的位置。PWM波从信号线输入给舵机,舵机接收的PWM信号频率为50HZ,即周期为20ms。当高电平的脉宽在0.5ms-2.5ms之间时舵机就可以对应旋转到不同的角度。舵机接入电路图如图6所示。
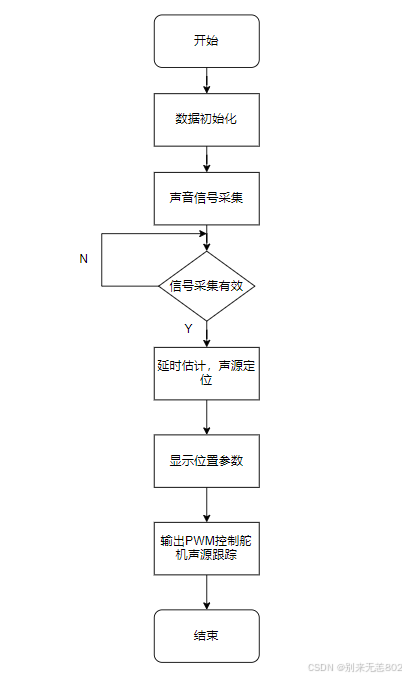
3. 系统软件设计分析
本系统由STM32单片机进行编程。单片机主要功能ADC采集以及PWM波输出。软件框图如图8所示。声源信号由麦克风接收,经过调理后进入 S T M32 中进行 A D 转换,再传输到 STM32 的内存中,最后将 DMA 缓冲区中三个通道的数据进行分离并保存;由于前置放大器会对信号产生直流偏置,需对采集到的信号进行一些预处理操作。同时根据短时平均幅度,判断采集到的数据是否含有有效的声音信号;利用广义互相关算法得到时延,再利用几何定位法计算出声源的位置,完成后显示结果;根据定位结果发送PWM波驱动舵机转动,使其对准声源,并持续跟踪。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 11
11 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)