基于STM32的手势控制机械臂开发指南
本系统采用STM32F411作为控制核心,结合APDS-9960手势传感器实现非接触式机械臂控制。系统可识别5种基本手势(左右滑动、上下滑动、接近远离),通过PID算法实现四自由度机械臂的平滑运动控制。3. 调整PID参数(建议Kp=0.8, Ki=0.05, Kd=0.1)1. 检查I²C地址是否正确(默认0x39)2. 检查电源电压是否稳定(建议单独供电)1. 在PWM输出端并联104瓷片电容
引言
本系统采用STM32F411作为控制核心,结合APDS-9960手势传感器实现非接触式机械臂控制。系统可识别5种基本手势(左右滑动、上下滑动、接近远离),通过PID算法实现四自由度机械臂的平滑运动控制。
环境准备
硬件配置
开发环境
1. STM32CubeIDE 1.13.2
2. STM32CubeF4 HAL库
3. APDS-9960官方驱动库
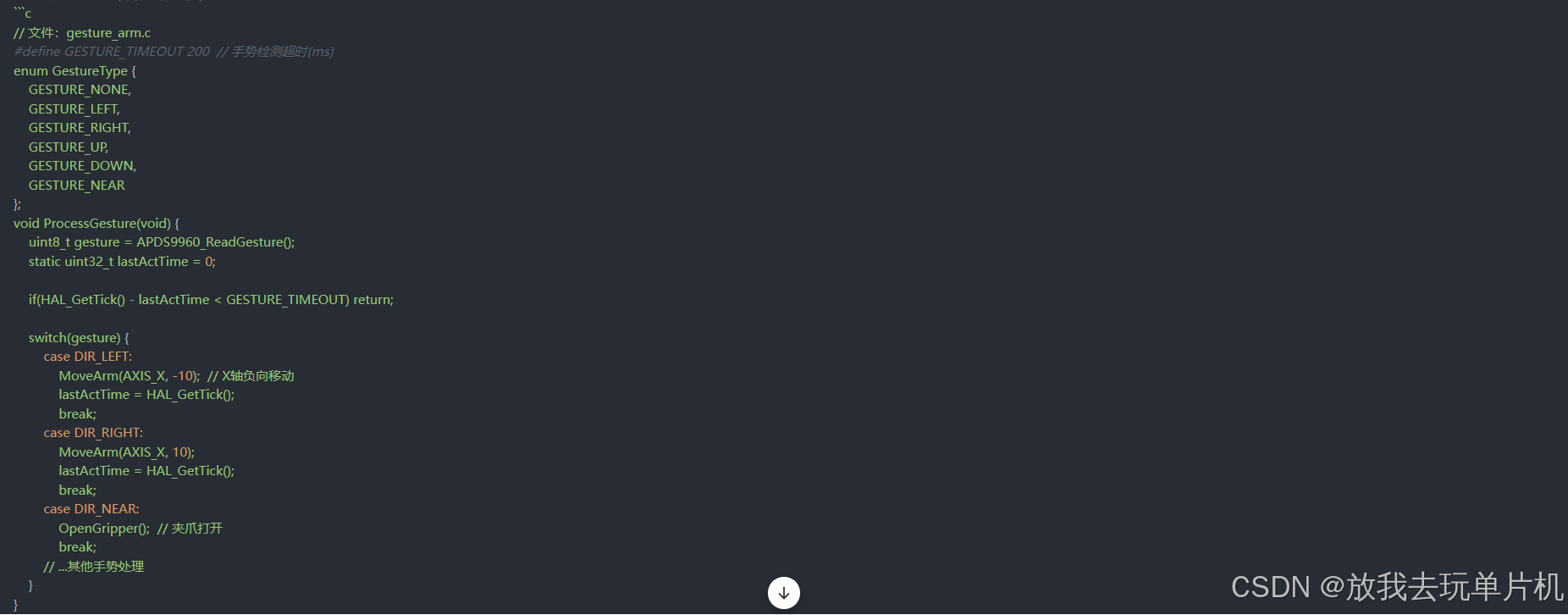
核心代码实现(手势识别部分)
常见问题与解决方案
Q1 手势传感器无法识别动作
- 排查步骤:
1. 检查I²C地址是否正确(默认0x39)
2. 用逻辑分析仪查看SCL/SDA波形
3. 确认环境光干扰(避免强光直射)
Q2 舵机出现异常抖动
- 解决方案:
1. 在PWM输出端并联104瓷片电容
2. 检查电源电压是否稳定(建议单独供电)
3. 增加软件死区控制
Q3 机械臂运动不连贯
- 优化方法:
1. 在MoveArm函数中添加S曲线加减速
2. 使用DMA传输PWM参数
3. 调整PID参数(建议Kp=0.8, Ki=0.05, Kd=0.1)

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 4
4 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)