Allspark2 Orin NX初级使用-部署yolov5算法
Allspark-Orin NX是AMOVLAB专为小型机器人打造的一款高性能、小体积的AI边缘计算机。它内置NVIDIA Jetson Orin NX模块,提供最高100TOPS 浮点运算能力。Allspark-Orin NX内置SSD固态盘和WiFi模组(可选配置),提供丰富的接口,不仅性能强大,而且拥有更强的灵活性与扩展性。Allspark-Orin NX适合应用于智能追踪识别,行为分析预测
一、概述
拿到新的边缘计算设备,就从部署yolov5开始吧!
二、设备介绍
Allspark-Orin NX是AMOVLAB专为小型机器人打造的一款高性能、小体积的AI边缘计算机。它内置NVIDIA Jetson Orin NX模块,提供最高100TOPS 浮点运算能力。Allspark-Orin NX内置SSD固态盘和WiFi模组(可选配置),提供丰富的接口,不仅性能强大,而且拥有更强的灵活性与扩展性。Allspark-Orin NX适合应用于智能追踪识别,行为分析预测,视频图像分析,地图3D建模,边缘服务计算等需要实时进行AI处理的边缘系统中。机身采用铝合金新材料外壳设计,内置主动散热装置,尺寸102.5mm62.5mm31mm,重量约188g,具有体积小,重量轻的优点。
(base) amov@tegra-ubuntu:~/zfcWork/guangdongPro$ uname -a
Linux tegra-ubuntu 5.10.216-tegra #5 SMP PREEMPT Mon Nov 4 15:34:10 CST 2024 aarch64 aarch64 aarch64 GNU/Linux
(base) amov@tegra-ubuntu:~/zfcWork/guangdongPro$ cat /etc/os-release
NAME="Ubuntu"
VERSION="20.04.6 LTS (Focal Fossa)"
ID=ubuntu
ID_LIKE=debian
PRETTY_NAME="Ubuntu 20.04.6 LTS"
VERSION_ID="20.04"
HOME_URL="https://www.ubuntu.com/"
SUPPORT_URL="https://help.ubuntu.com/"
BUG_REPORT_URL="https://bugs.launchpad.net/ubuntu/"
PRIVACY_POLICY_URL="https://www.ubuntu.com/legal/terms-and-policies/privacy-policy"
VERSION_CODENAME=focal
UBUNTU_CODENAME=focal
三、操作
jetson orin nx上搭建yolov5的运行环境_jetson orinnx yolo-CSDN博客
[Jetson][转载]jetson上安装pytorch+torchvision教程_51CTO博客_jetson nano pytorch教程
以上是相关参考文献,下面就可以开始了,在本机上ssh连接设备后远程操作即可。
1、安装jetpack、jtop
见上述链接;
Jetpack默认已安装opencv、cuda(/usr/local目录下查看)、cudnn,故只需再安装pytorch即可,留意jetson是arm架构,需要下载对应的安装文件加以安装
2、安装miniconda,创建虚拟环境
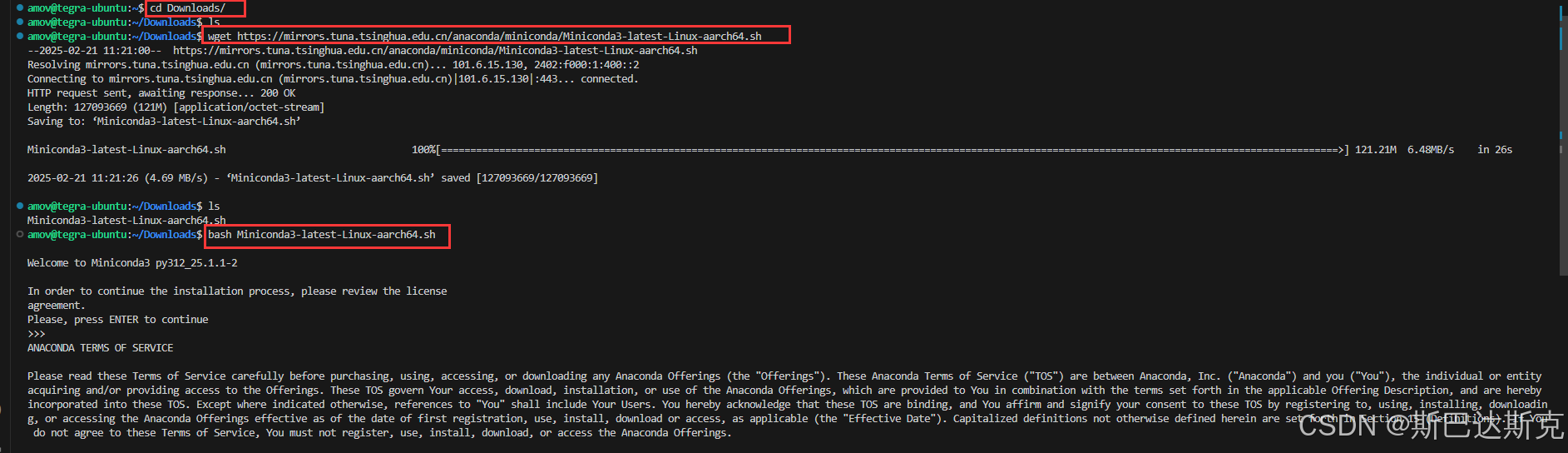
conda create -n yolov561 python=3.8
conda activate yolov5613、安装正确版本的pytorch
jtop命令查看Jetpack 5.1.4;
YOLOv5-6.1版本要求torch>=1.7.0;
PyTorch for jetson 在这个网址查看并下载安装包,如下图: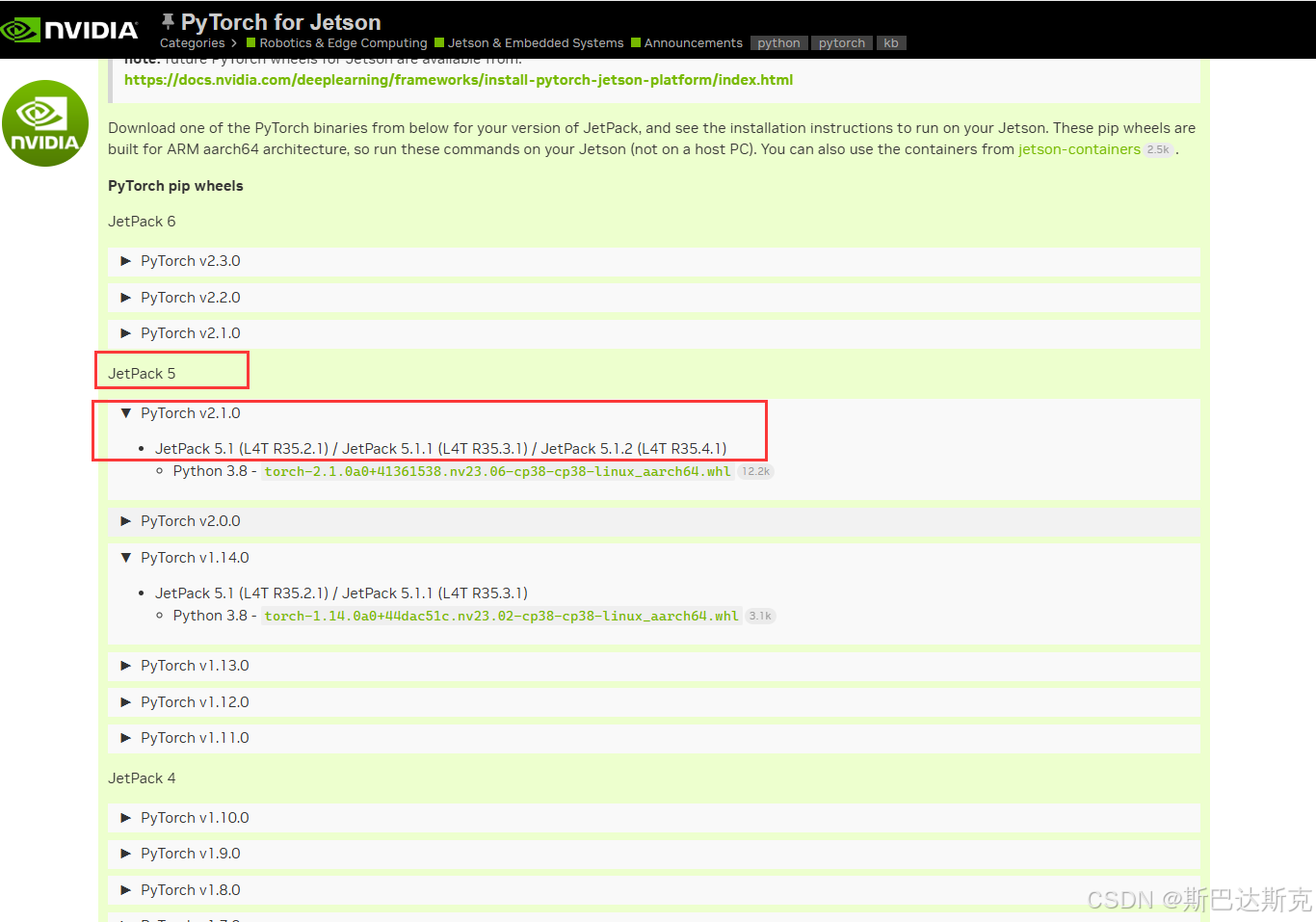
安装包下载好后,下面命令安装:
pip3 install torch-2.1.0a0+41361538.nv23.06-cp38-cp38-linux_aarch64.whl 安装完成测试一下:
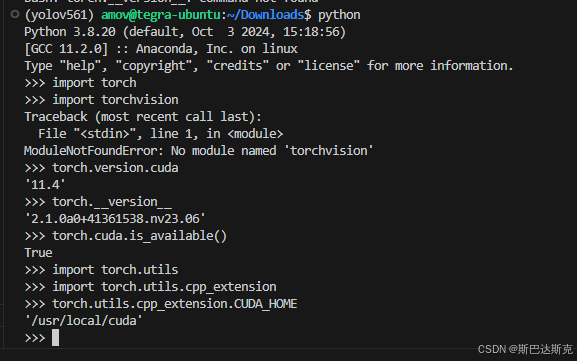
还差个torchvision!查看torch与torchvision对应关系:pytorch/vision: Datasets, Transforms and Models specific to Computer Vision
安装命令如下:
sudo apt-get -y install cmake
sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libavcodec-dev libavformat-dev libswscale-dev
git clone --branch v0.16.0 https://github.com/pytorch/vision.git torchvision
cd torchvision
export BUILD_VERSION=0.16.0
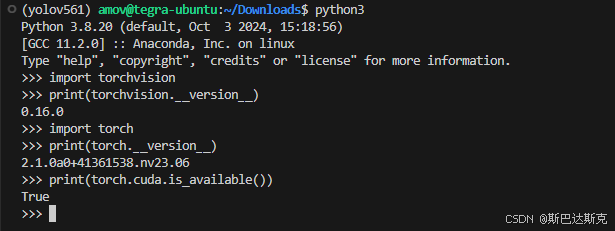
python3 setup.py install --user测试结果如下:
4、安装yolov5环境
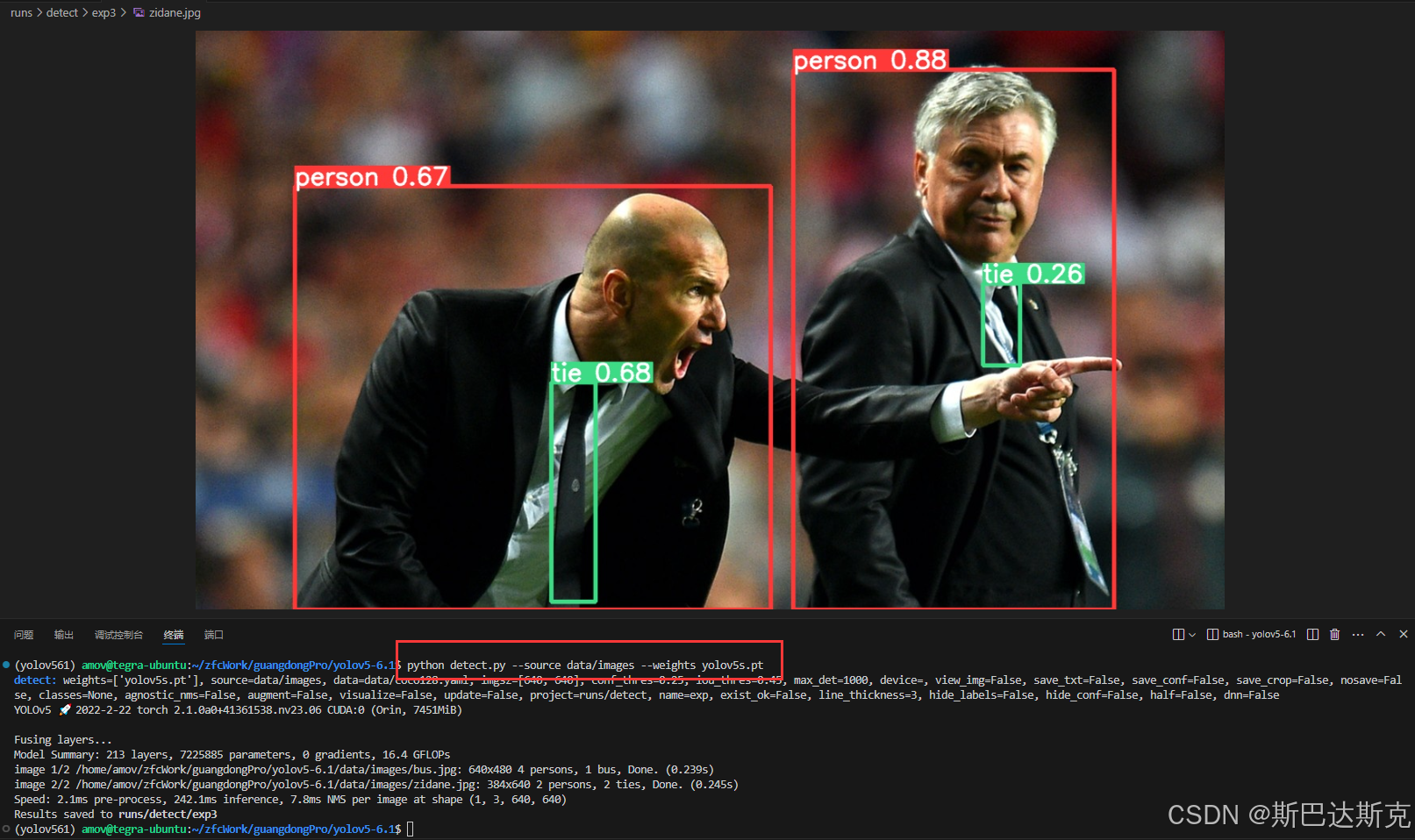
pip install -r requirements.txt四、代码测试
python detect.py --source data/images --weights yolov5s.pt AttributeError: 'Upsample' object has no attribute 'recompute_scale_factor'
报错参考:https://blog.csdn.net/m0_62988777/article/details/131858230结果如下:
五、算法部署性能参数
直接使用YOLOv5内置输出

tip:我有自己的一份数据集,并且使用yolov5-6.1训练得到了一个模型,用于测试。
python detectZfc.py --weights yolov5model/exp/weights/best.pt --source data/zfc_images/pic| 指标 | 性能参数 |
| 模型标准输入分辨率 | 640*640 |
| 总处理图片数 | 100 |
| 平均预处理时间 |
1.6ms |
| 平均推理时间 | 35.2ms |
| 平均NMS时间 | 3.8ms |
| 单帧总耗时 | 40.6ms |
| 实时帧率FPS | 24.63 |
|
计算复杂度 |
15.8GFLOPs |
| GPU显存占用峰值 | 0.21GB |
| 平均GPU占用 | 63.89MB |
| 模型参数量 | 7.03M |
持续更新.......

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)