基于STM32C8T6的IIS3DWB SPI轮询通信测试代码
将iis3dwb_reg.c和iis3dwb_reg.h添加到工程。添加必要的HAL库和中间件(USB Device)在USB CDC回调函数中处理传输完成事件。
·
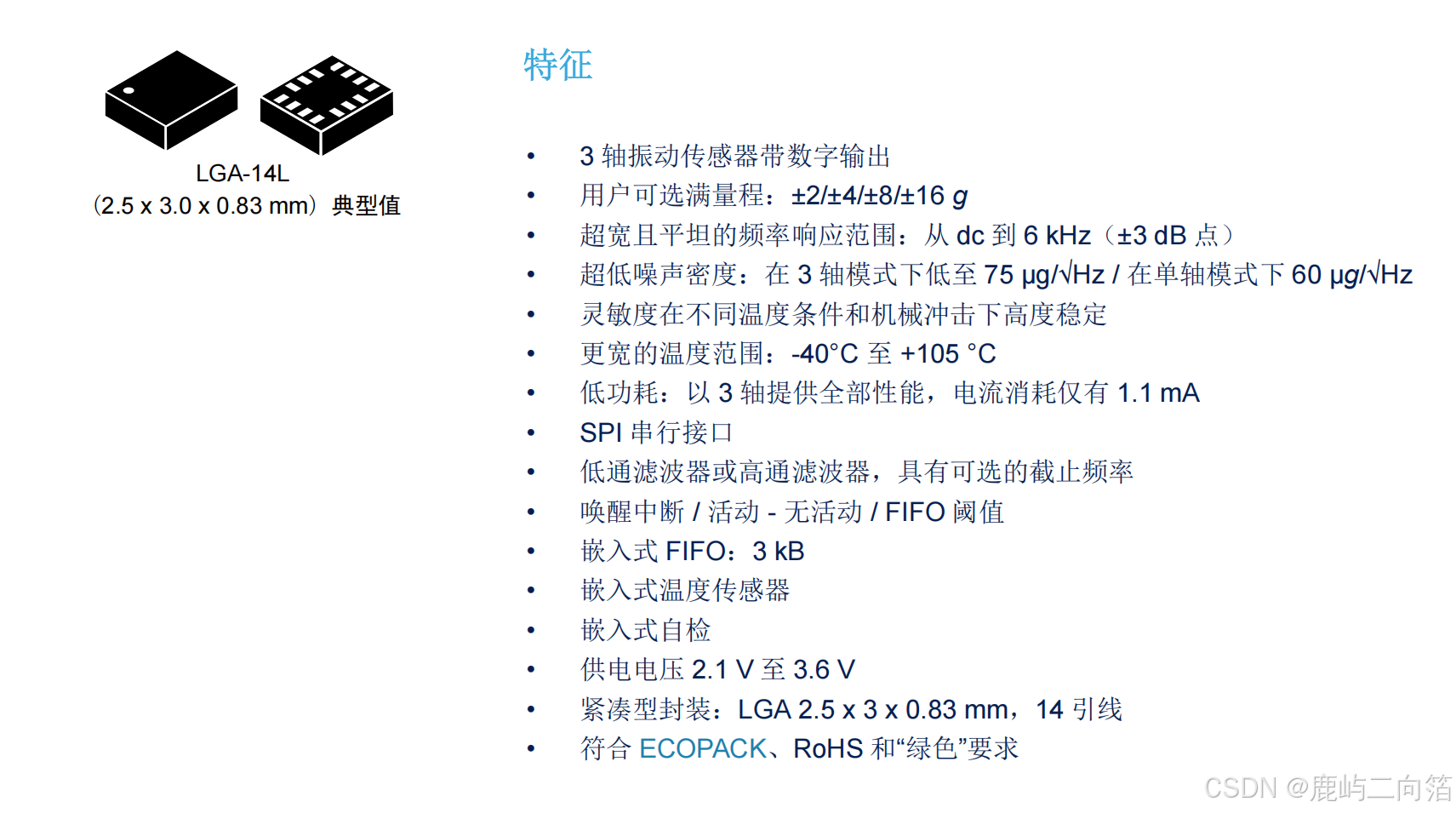
硬件平台STM32C8T6+IIS3DWB三轴加速度传感器
- List item
这个代码实现了:
- SPI接口的硬件控制
- 手动NSS片选管理
- 传感器初始化配置
- 加速度和温度的轮询采集
- 通过USB CDC输出格式化数据
代码可以完美运行,USB速率可以达到12M,量程可达±16g,采样速率最高26.6K。 参考原理图:
参考原理图: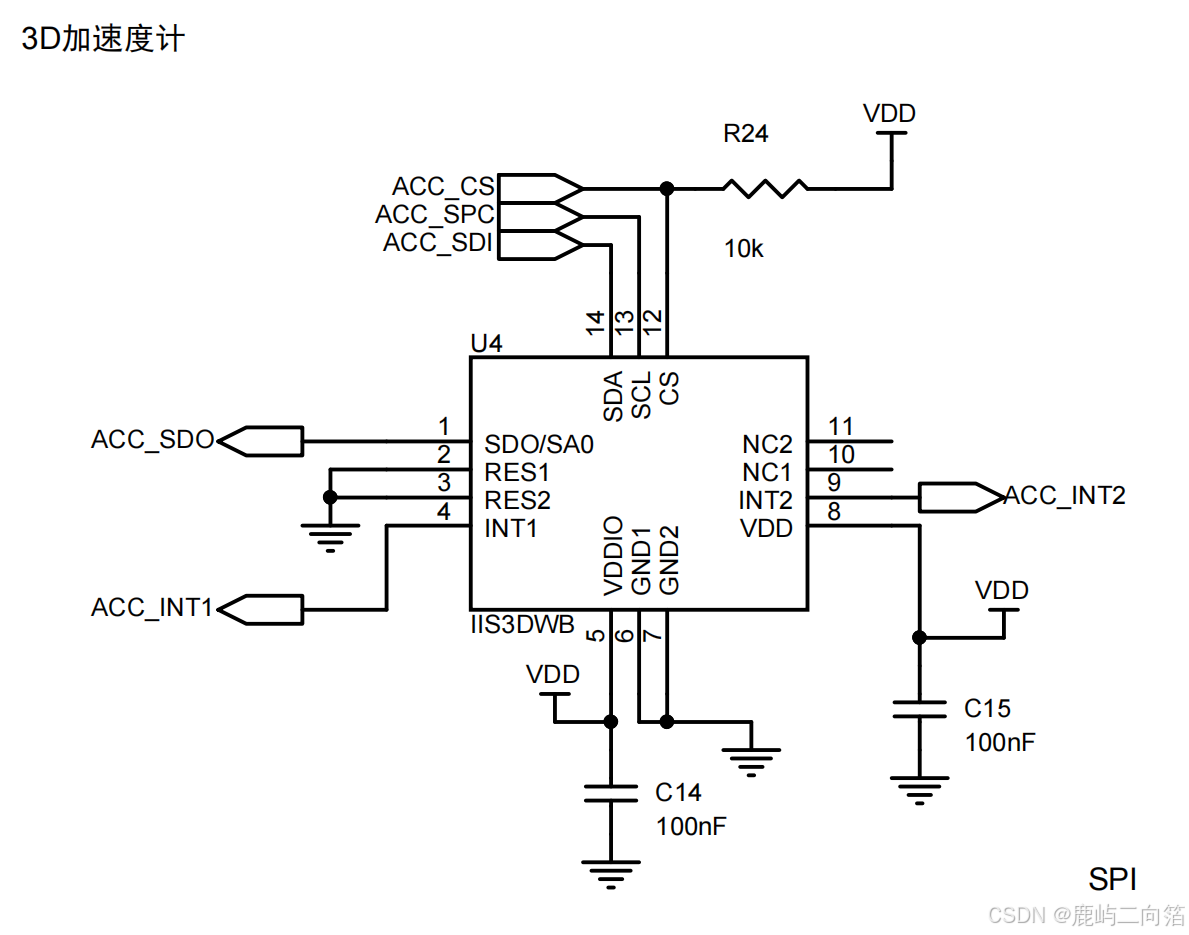
采用CubeMX生成HAL库,STM32C8T6的引脚配置情况如下,使用SPI1,CS引脚可以根据需求随意设置,USB引脚是固定的。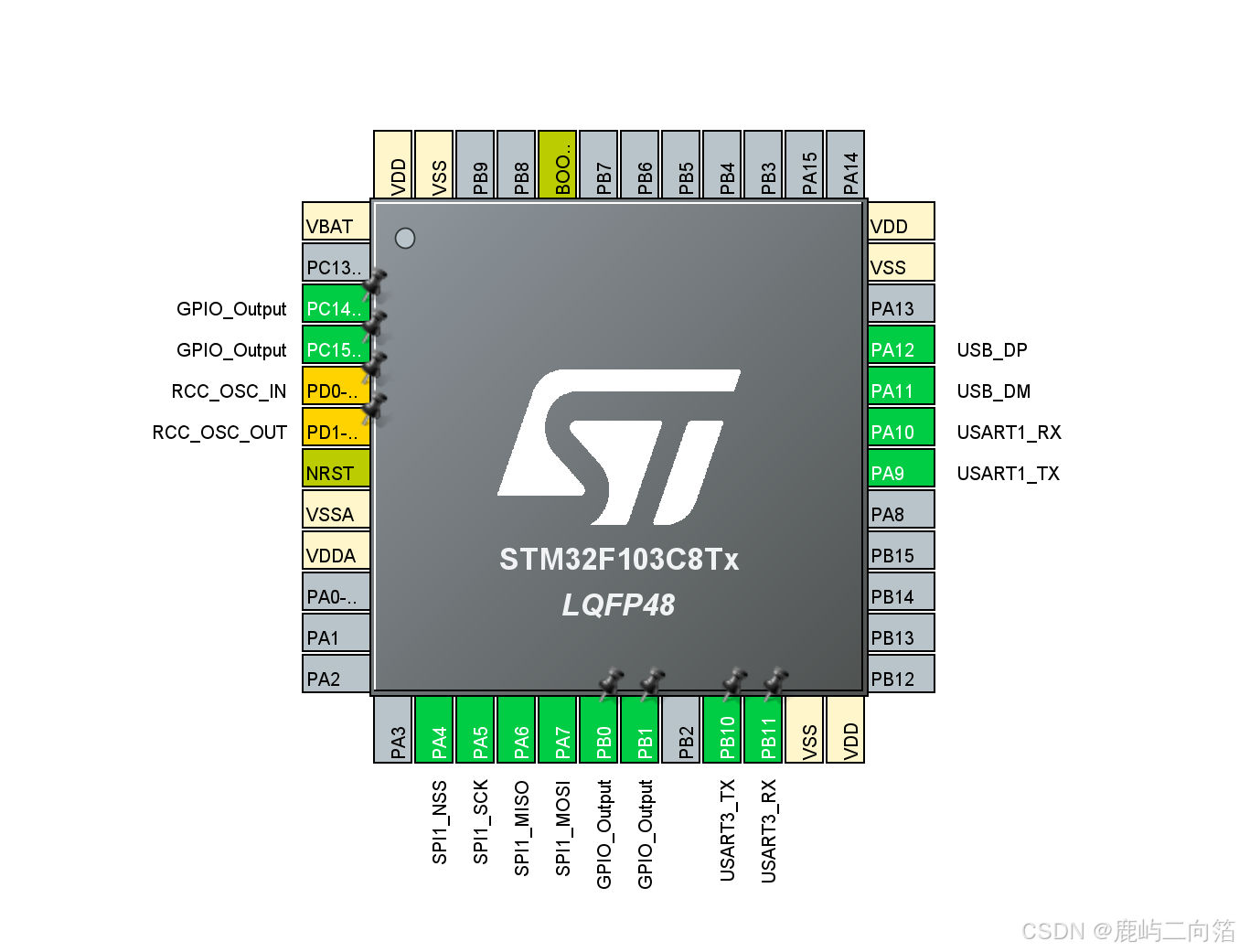
/* main.c */
#include "main.h"
#include "iis3dwb_reg.h"
SPI_HandleTypeDef hspi1;
extern USBD_HandleTypeDef hUsbDeviceFS;
/* 传感器上下文 */
stmdev_ctx_t dev_ctx;
/* 私有函数声明 */
static void SPI1_Init(void);
static void GPIO_Init(void);
static int32_t platform_write(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len);
static int32_t platform_read(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len);
static void Error_Handler(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
GPIO_Init();
SPI1_Init();
MX_USB_DEVICE_Init();
/* 初始化传感器接口 */
dev_ctx.write_reg = platform_write;
dev_ctx.read_reg = platform_read;
dev_ctx.handle = &hspi1;
/* 等待传感器启动 */
HAL_Delay(100);
/* 验证设备ID */
uint8_t whoamI;
iis3dwb_device_id_get(&dev_ctx, &whoamI);
if (whoamI != IIS3DWB_ID) {
Error_Handler();
}
/* 传感器配置 */
iis3dwb_reset_set(&dev_ctx, PROPERTY_ENABLE);
HAL_Delay(10);
iis3dwb_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
iis3dwb_xl_data_rate_set(&dev_ctx, IIS3DWB_XL_ODR_26k7Hz);
iis3dwb_xl_full_scale_set(&dev_ctx, IIS3DWB_2g);
iis3dwb_xl_filt_path_on_out_set(&dev_ctx, IIS3DWB_LP_ODR_DIV_100);
int16_t data_raw_acc[3];
int16_t data_raw_temp;
float acc_mg[3];
float temp_degC;
uint8_t status;
while (1)
{
/* 轮询加速度数据 */
iis3dwb_xl_flag_data_ready_get(&dev_ctx, &status);
if (status) {
iis3dwb_acceleration_raw_get(&dev_ctx, data_raw_acc);
acc_mg[0] = iis3dwb_from_fs2g_to_mg(data_raw_acc[0]);
acc_mg[1] = iis3dwb_from_fs2g_to_mg(data_raw_acc[1]);
acc_mg[2] = iis3dwb_from_fs2g_to_mg(data_raw_acc[2]);
char buf[100];
int len = snprintf(buf, sizeof(buf), "Acc: X=%.2f mg, Y=%.2f mg, Z=%.2f mg\r\n",
acc_mg[0], acc_mg[1], acc_mg[2]);
CDC_Transmit_FS((uint8_t*)buf, len);
}
/* 轮询温度数据 */
iis3dwb_temp_flag_data_ready_get(&dev_ctx, &status);
if (status) {
iis3dwb_temperature_raw_get(&dev_ctx, &data_raw_temp);
temp_degC = iis3dwb_from_lsb_to_celsius(data_raw_temp);
char buf[50];
int len = snprintf(buf, sizeof(buf), "Temp: %.2f C\r\n", temp_degC);
CDC_Transmit_FS((uint8_t*)buf, len);
}
HAL_Delay(10);
}
}
/* SPI读写实现 */
static int32_t platform_write(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
/* 添加寄存器写标志 */
reg |= 0x00; // 写操作不需要修改寄存器地址
HAL_SPI_Transmit(handle, ®, 1, 100);
HAL_SPI_Transmit(handle, (uint8_t*)bufp, len, 100);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
return 0;
}
static int32_t platform_read(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
/* 添加寄存器读标志 */
reg |= 0x80; // 设置读位
HAL_SPI_Transmit(handle, ®, 1, 100);
HAL_SPI_Receive(handle, bufp, len, 100);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
return 0;
}
/* SPI初始化 */
static void SPI1_Init(void)
{
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi1.Init.NSS = SPI_NSS_SOFT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_32;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
if (HAL_SPI_Init(&hspi1) != HAL_OK) {
Error_Handler();
}
}
/* GPIO初始化 */
static void GPIO_Init(void)
{
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* NSS引脚配置 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
/* SPI引脚配置 */
GPIO_InitStruct.Pin = GPIO_PIN_3|GPIO_PIN_4|GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF0_SPI1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
static void Error_Handler(void)
{
while(1) {
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
HAL_Delay(100);
}
}
/* 系统时钟配置和USB初始化需要根据实际工程配置 */
下面是iis3dwb_reg.c和iis3dwb_reg.h文件,是官方的文件,比较重要。
/**
******************************************************************************
* @file iis3dwb_reg.c
* @author Sensors Software Solution Team
* @brief IIS3DWB driver file
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
#include "iis3dwb_reg.h"
#include <string.h>
/**
* @defgroup IIS3DWB
* @brief This file provides a set of functions needed to drive the
* iis3dwb enhanced inertial module.
* @{
*
*/
/**
* @defgroup IIS3DWB_Interfaces_Functions
* @brief This section provide a set of functions used to read and
* write a generic register of the device.
* MANDATORY: return 0 -> no Error.
* @{
*
*/
/**
* @brief Read generic device register
*
* @param ctx read / write interface definitions(ptr)
* @param reg register to read
* @param data pointer to buffer that store the data read(ptr)
* @param len number of consecutive register to read
* @retval interface status (MANDATORY: return 0 -> no Error)
*
*/
int32_t __weak iis3dwb_read_reg(const stmdev_ctx_t *ctx, uint8_t reg,
uint8_t *data,
uint16_t len)
{
if (ctx == NULL) return -1;
return ctx->read_reg(ctx->handle, reg, data, len);
}
/**
* @brief Write generic device register
*
* @param ctx read / write interface definitions(ptr)
* @param reg register to write
* @param data pointer to data to write in register reg(ptr)
* @param len number of consecutive register to write
* @retval interface status (MANDATORY: return 0 -> no Error)
*
*/
int32_t __weak iis3dwb_write_reg(const stmdev_ctx_t *ctx, uint8_t reg,
uint8_t *data,
uint16_t len)
{
if (ctx == NULL) return -1;
return ctx->write_reg(ctx->handle, reg, data, len);
}
/**
* @}
*
*/
/**
* @defgroup Private functions
* @brief Section collect all the utility functions needed by APIs.
* @{
*
*/
static void bytecpy(uint8_t *target, const uint8_t *source)
{
if ((target != NULL) && (source != NULL))
{
*target = *source;
}
}
/**
* @}
*
*/
/**
* @defgroup IIS3DWB_Sensitivity
* @brief These functions convert raw-data into engineering units.
* @{
*
*/
float_t iis3dwb_from_fs2g_to_mg(int16_t lsb)
{
return ((float_t)lsb * 0.061f);
}
float_t iis3dwb_from_fs4g_to_mg(int16_t lsb)
{
return ((float_t)lsb * 0.122f);
}
float_t iis3dwb_from_fs8g_to_mg(int16_t lsb)
{
return ((float_t)lsb * 0.244f);
}
float_t iis3dwb_from_fs16g_to_mg(int16_t lsb)
{
return ((float_t)lsb * 0.488f);
}
float_t iis3dwb_from_lsb_to_celsius(int16_t lsb)
{
return (((float_t)lsb / 256.0f) + 25.0f);
}
float_t iis3dwb_from_lsb_to_nsec(int32_t lsb)
{
return ((float_t)lsb * 25000.0f);
}
/**
* @}
*
*/
/**
* @defgroup LSM9DS1_Data_generation
* @brief This section groups all the functions concerning data
* generation
* @{
*
*/
/**
* @brief Accelerometer full-scale selection[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of fs_xl in reg CTRL1_XL
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_full_scale_set(const stmdev_ctx_t *ctx,
iis3dwb_fs_xl_t val)
{
iis3dwb_ctrl1_xl_t ctrl1_xl;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL1_XL, (uint8_t *)&ctrl1_xl, 1);
if (ret == 0)
{
ctrl1_xl.fs_xl = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL1_XL,
(uint8_t *)&ctrl1_xl, 1);
}
return ret;
}
/**
* @brief Accelerometer full-scale selection.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of fs_xl in reg CTRL1_XL
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_full_scale_get(const stmdev_ctx_t *ctx,
iis3dwb_fs_xl_t *val)
{
iis3dwb_ctrl1_xl_t ctrl1_xl;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL1_XL, (uint8_t *)&ctrl1_xl, 1);
switch (ctrl1_xl.fs_xl)
{
case IIS3DWB_2g:
*val = IIS3DWB_2g;
break;
case IIS3DWB_16g:
*val = IIS3DWB_16g;
break;
case IIS3DWB_4g:
*val = IIS3DWB_4g;
break;
case IIS3DWB_8g:
*val = IIS3DWB_8g;
break;
default:
*val = IIS3DWB_2g;
break;
}
return ret;
}
/**
* @brief Accelerometer UI data rate selection.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of xl_en in reg CTRL1_XL
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_data_rate_set(const stmdev_ctx_t *ctx,
iis3dwb_odr_xl_t val)
{
iis3dwb_ctrl1_xl_t ctrl1_xl;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL1_XL, (uint8_t *)&ctrl1_xl, 1);
if (ret == 0)
{
ctrl1_xl.xl_en = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL1_XL,
(uint8_t *)&ctrl1_xl, 1);
}
return ret;
}
/**
* @brief Accelerometer UI data rate selection.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of odr_xl in reg CTRL1_XL
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_data_rate_get(const stmdev_ctx_t *ctx,
iis3dwb_odr_xl_t *val)
{
iis3dwb_ctrl1_xl_t ctrl1_xl;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL1_XL, (uint8_t *)&ctrl1_xl, 1);
switch (ctrl1_xl.xl_en)
{
case IIS3DWB_XL_ODR_OFF:
*val = IIS3DWB_XL_ODR_OFF;
break;
case IIS3DWB_XL_ODR_26k7Hz:
*val = IIS3DWB_XL_ODR_26k7Hz;
break;
default:
*val = IIS3DWB_XL_ODR_OFF;
break;
}
return ret;
}
/**
* @brief Block data update.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of bdu in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_block_data_update_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
if (ret == 0)
{
ctrl3_c.bdu = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
}
return ret;
}
/**
* @brief Block data update.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of bdu in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_block_data_update_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
*val = ctrl3_c.bdu;
return ret;
}
/**
* @brief Weight of XL user offset bits of registers X_OFS_USR (73h),
* Y_OFS_USR (74h), Z_OFS_USR (75h).[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of usr_off_w in reg CTRL6_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_offset_weight_set(const stmdev_ctx_t *ctx,
iis3dwb_usr_off_w_t val)
{
iis3dwb_ctrl6_c_t ctrl6_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL6_C, (uint8_t *)&ctrl6_c, 1);
if (ret == 0)
{
ctrl6_c.usr_off_w = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL6_C, (uint8_t *)&ctrl6_c, 1);
}
return ret;
}
/**
* @brief Weight of XL user offset bits of registers X_OFS_USR (73h),
* Y_OFS_USR (74h), Z_OFS_USR (75h).[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of usr_off_w in reg CTRL6_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_offset_weight_get(const stmdev_ctx_t *ctx,
iis3dwb_usr_off_w_t *val)
{
iis3dwb_ctrl6_c_t ctrl6_c;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL6_C, (uint8_t *)&ctrl6_c, 1);
switch (ctrl6_c.usr_off_w)
{
case IIS3DWB_LSb_1mg:
*val = IIS3DWB_LSb_1mg;
break;
case IIS3DWB_LSb_16mg:
*val = IIS3DWB_LSb_16mg;
break;
default:
*val = IIS3DWB_LSb_1mg;
break;
}
return ret;
}
/**
* @brief select accelerometer axis.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of xl_axis_sel in reg CTRL6_C and
* the values of _1ax_to_3regout in reg CTRL4_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_axis_selection_set(const stmdev_ctx_t *ctx,
iis3dwb_xl_axis_sel_t val)
{
iis3dwb_ctrl4_c_t ctrl4_c;
iis3dwb_ctrl6_c_t ctrl6_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL4_C, (uint8_t *)&ctrl4_c, 1);
if (ret == 0)
{
ctrl4_c._1ax_to_3regout = ((uint8_t)val & 0x10U) >> 4;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL4_C, (uint8_t *)&ctrl4_c, 1);
}
if (ret == 0)
{
ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL6_C, (uint8_t *)&ctrl6_c, 1);
}
if (ret == 0)
{
ctrl6_c.xl_axis_sel = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL6_C, (uint8_t *)&ctrl6_c, 1);
}
return ret;
}
/**
* @brief select accelerometer axis.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of xl_axis_sel in reg CTRL6_C and
* the values of _1ax_to_3regout in reg CTRL4_C.(ptr)
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_axis_selection_get(const stmdev_ctx_t *ctx,
iis3dwb_xl_axis_sel_t *val)
{
iis3dwb_ctrl4_c_t ctrl4_c;
iis3dwb_ctrl6_c_t ctrl6_c;
*val = IIS3DWB_ENABLE_ALL;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL4_C, (uint8_t *)&ctrl4_c, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL6_C, (uint8_t *)&ctrl6_c, 1);
if (ret != 0) { return ret; }
switch ((ctrl4_c._1ax_to_3regout << 4) + ctrl6_c.xl_axis_sel)
{
case IIS3DWB_ENABLE_ALL:
*val = IIS3DWB_ENABLE_ALL;
break;
case IIS3DWB_ONLY_X_ON_ONE_OUT_REG:
*val = IIS3DWB_ONLY_X_ON_ONE_OUT_REG;
break;
case IIS3DWB_ONLY_Y_ON_ONE_OUT_REG:
*val = IIS3DWB_ONLY_Y_ON_ONE_OUT_REG;
break;
case IIS3DWB_ONLY_Z_ON_ONE_OUT_REG:
*val = IIS3DWB_ONLY_Z_ON_ONE_OUT_REG;
break;
case IIS3DWB_ONLY_X_ON_ALL_OUT_REG:
*val = IIS3DWB_ONLY_X_ON_ALL_OUT_REG;
break;
case IIS3DWB_ONLY_Y_ON_ALL_OUT_REG:
*val = IIS3DWB_ONLY_Y_ON_ALL_OUT_REG;
break;
case IIS3DWB_ONLY_Z_ON_ALL_OUT_REG:
*val = IIS3DWB_ONLY_Z_ON_ALL_OUT_REG;
break;
default:
*val = IIS3DWB_ENABLE_ALL;
break;
}
return ret;
}
/**
* @brief Read all the interrupt flag of the device.[get]
* @param ctx Read / write interface definitions.(ptr)
* @param val Get registers ALL_INT_SRC; WAKE_UP_SRC;
* TAP_SRC; D6D_SRC; STATUS_REG;
* EMB_FUNC_STATUS; FSM_STATUS_A/B
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_all_sources_get(const stmdev_ctx_t *ctx,
iis3dwb_all_sources_t *val)
{
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_ALL_INT_SRC,
(uint8_t *)&val->all_int_src, 1);
if (ret == 0)
{
ret = iis3dwb_read_reg(ctx, IIS3DWB_WAKE_UP_SRC,
(uint8_t *)&val->wake_up_src, 1);
}
if (ret == 0)
{
ret = iis3dwb_read_reg(ctx, IIS3DWB_STATUS_REG,
(uint8_t *)&val->status_reg, 1);
}
return ret;
}
/**
* @brief The STATUS_REG register is read by the primary interface.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get register STATUS_REG
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_status_reg_get(const stmdev_ctx_t *ctx,
iis3dwb_status_reg_t *val)
{
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_STATUS_REG, (uint8_t *) val, 1);
return ret;
}
/**
* @brief Accelerometer new data available.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of xlda in reg STATUS_REG
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_flag_data_ready_get(const stmdev_ctx_t *ctx,
uint8_t *val)
{
iis3dwb_status_reg_t status_reg;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_STATUS_REG,
(uint8_t *)&status_reg, 1);
*val = status_reg.xlda;
return ret;
}
/**
* @brief Temperature new data available.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of tda in reg STATUS_REG
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_temp_flag_data_ready_get(const stmdev_ctx_t *ctx,
uint8_t *val)
{
iis3dwb_status_reg_t status_reg;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_STATUS_REG,
(uint8_t *)&status_reg, 1);
*val = status_reg.tda;
return ret;
}
/**
* @brief Enables the accelerometer user offset correction block, can be enabled
* by setting the USR_OFF_ON_OUT bit of the CTRL7_C register.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of USR_OFF_ON_OUT in reg CTRL7_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_usr_offset_block_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_ctrl7_c_t ctrl7_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL7_C, (uint8_t *)&ctrl7_c, 1);
if (ret == 0)
{
ctrl7_c.usr_off_on_out = val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL7_C, (uint8_t *)&ctrl7_c, 1);
}
return ret;
}
/**
* @brief Enables the accelerometer user offset correction block, can be enabled
* by setting the USR_OFF_ON_OUT bit of the CTRL7_C register.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of USR_OFF_ON_OUT in reg CTRL7_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_usr_offset_block_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_ctrl7_c_t ctrl7_c;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL7_C, (uint8_t *)&ctrl7_c, 1);
*val = ctrl7_c.usr_off_on_out;
return ret;
}
/**
* @brief Accelerometer X-axis user offset correction expressed in two’s
* complement, weight depends on USR_OFF_W in CTRL6_C (15h).
* The value must be in the range [-127 127].[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param buff Buffer that contains data to write
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_usr_offset_x_set(const stmdev_ctx_t *ctx, uint8_t *buff)
{
const int32_t ret = iis3dwb_write_reg(ctx, IIS3DWB_X_OFS_USR, buff, 1);
return ret;
}
/**
* @brief Accelerometer X-axis user offset correction expressed in two’s
* complement, weight depends on USR_OFF_W in CTRL6_C (15h).
* The value must be in the range [-127 127].[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param buff Buffer that stores data read
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_usr_offset_x_get(const stmdev_ctx_t *ctx, uint8_t *buff)
{
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_X_OFS_USR, buff, 1);
return ret;
}
/**
* @brief Accelerometer Y-axis user offset correction expressed in two’s
* complement, weight depends on USR_OFF_W in CTRL6_C (15h).
* The value must be in the range [-127 127].[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param buff Buffer that contains data to write
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_usr_offset_y_set(const stmdev_ctx_t *ctx, uint8_t *buff)
{
const int32_t ret = iis3dwb_write_reg(ctx, IIS3DWB_Y_OFS_USR, buff, 1);
return ret;
}
/**
* @brief Accelerometer Y-axis user offset correction expressed in two’s
* complement, weight depends on USR_OFF_W in CTRL6_C (15h).
* The value must be in the range [-127 127].[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param buff Buffer that stores data read
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_usr_offset_y_get(const stmdev_ctx_t *ctx, uint8_t *buff)
{
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_Y_OFS_USR, buff, 1);
return ret;
}
/**
* @brief Accelerometer Z-axis user offset correction expressed in two’s
* complement, weight depends on USR_OFF_W in CTRL6_C (15h).
* The value must be in the range [-127 127].[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param buff Buffer that contains data to write
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_usr_offset_z_set(const stmdev_ctx_t *ctx, uint8_t *buff)
{
const int32_t ret = iis3dwb_write_reg(ctx, IIS3DWB_Z_OFS_USR, buff, 1);
return ret;
}
/**
* @brief Accelerometer X-axis user offset correction expressed in two’s
* complement, weight depends on USR_OFF_W in CTRL6_C (15h).
* The value must be in the range [-127 127].[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param buff Buffer that stores data read
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_usr_offset_z_get(const stmdev_ctx_t *ctx, uint8_t *buff)
{
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_Z_OFS_USR, buff, 1);
return ret;
}
/**
* @}
*
*/
/**
* @defgroup IIS3DWB_Timestamp
* @brief This section groups all the functions that manage the
* timestamp generation.
* @{
*
*/
/**
* @brief Reset timestamp counter.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_timestamp_rst(const stmdev_ctx_t *ctx)
{
uint8_t rst_val = 0xAA;
return iis3dwb_write_reg(ctx, IIS3DWB_TIMESTAMP2, &rst_val, 1);
}
/**
* @brief Enables timestamp counter.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of timestamp_en in reg CTRL10_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_timestamp_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_ctrl10_c_t ctrl10_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL10_C, (uint8_t *)&ctrl10_c, 1);
if (ret == 0)
{
ctrl10_c.timestamp_en = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL10_C,
(uint8_t *)&ctrl10_c, 1);
}
return ret;
}
/**
* @brief Enables timestamp counter.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of timestamp_en in reg CTRL10_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_timestamp_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_ctrl10_c_t ctrl10_c;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL10_C, (uint8_t *)&ctrl10_c, 1);
*val = ctrl10_c.timestamp_en;
return ret;
}
/**
* @brief Timestamp first data output register (r).
* The value is expressed as a 32-bit word and the bit resolution
* is 25 μs.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Buffer that stores data read
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_timestamp_raw_get(const stmdev_ctx_t *ctx, uint32_t *val)
{
uint8_t buff[4];
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_TIMESTAMP0, buff, 4);
*val = buff[3];
*val = (*val * 256U) + buff[2];
*val = (*val * 256U) + buff[1];
*val = (*val * 256U) + buff[0];
return ret;
}
/**
* @}
*
*/
/**
* @defgroup IIS3DWB_Data output
* @brief This section groups all the data output functions.
* @{
*
*/
/**
* @brief Circular burst-mode (rounding) read of the output registers.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of rounding in reg CTRL5_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_rounding_mode_set(const stmdev_ctx_t *ctx,
iis3dwb_rounding_t val)
{
iis3dwb_ctrl5_c_t ctrl5_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL5_C, (uint8_t *)&ctrl5_c, 1);
if (ret == 0)
{
ctrl5_c.rounding = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL5_C, (uint8_t *)&ctrl5_c, 1);
}
return ret;
}
/**
* @brief Gyroscope UI chain full-scale selection.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of rounding in reg CTRL5_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_rounding_mode_get(const stmdev_ctx_t *ctx,
iis3dwb_rounding_t *val)
{
iis3dwb_ctrl5_c_t ctrl5_c;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL5_C, (uint8_t *)&ctrl5_c, 1);
switch (ctrl5_c.rounding)
{
case IIS3DWB_NO_ROUND:
*val = IIS3DWB_NO_ROUND;
break;
case IIS3DWB_ROUND:
*val = IIS3DWB_ROUND;
break;
default:
*val = IIS3DWB_NO_ROUND;
break;
}
return ret;
}
/**
* @brief Temperature data output register (r).
* L and H registers together express a 16-bit word in two’s
* complement.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Buffer that stores data read
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_temperature_raw_get(const stmdev_ctx_t *ctx, int16_t *val)
{
uint8_t buff[2];
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_OUT_TEMP_L, buff, 2);
*val = (int16_t)buff[1];
*val = (*val * 256) + (int16_t)buff[0];
return ret;
}
/**
* @brief Linear acceleration output register. The value is expressed as a
* 16-bit word in two’s complement.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Buffer that stores data read
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_acceleration_raw_get(const stmdev_ctx_t *ctx, int16_t *val)
{
uint8_t buff[6];
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_OUTX_L_A, buff, 6);
val[0] = (int16_t)buff[1];
val[0] = (val[0] * 256) + (int16_t)buff[0];
val[1] = (int16_t)buff[3];
val[1] = (val[1] * 256) + (int16_t)buff[2];
val[2] = (int16_t)buff[5];
val[2] = (val[2] * 256) + (int16_t)buff[4];
return ret;
}
/**
* @brief FIFO data output.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Buffer that stores data read
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_out_raw_get(const stmdev_ctx_t *ctx, iis3dwb_fifo_out_raw_t *val)
{
const int32_t ret = iis3dwb_fifo_out_multi_raw_get(ctx, val, 1);
return ret;
}
/**
* @brief FIFO data multi output.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param fdata Buffer that stores data read
* @param num Number of FIFO entries to be read
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_out_multi_raw_get(const stmdev_ctx_t *ctx,
iis3dwb_fifo_out_raw_t *fdata,
uint16_t num)
{
/* read out all FIFO entries in a single read */
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_DATA_OUT_TAG,
(uint8_t *)fdata,
sizeof(iis3dwb_fifo_out_raw_t) * num);
return ret;
}
/**
* @brief Identifies the sensor in FIFO_DATA_OUT.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of tag_sensor in reg FIFO_DATA_OUT_TAG
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_sensor_tag_get(const stmdev_ctx_t *ctx,
iis3dwb_fifo_tag_t *val)
{
iis3dwb_fifo_data_out_tag_t fifo_data_out_tag;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_DATA_OUT_TAG,
(uint8_t *)&fifo_data_out_tag, 1);
switch (fifo_data_out_tag.tag_sensor)
{
case IIS3DWB_XL_TAG:
*val = IIS3DWB_XL_TAG;
break;
case IIS3DWB_TEMPERATURE_TAG:
*val = IIS3DWB_TEMPERATURE_TAG;
break;
case IIS3DWB_TIMESTAMP_TAG:
*val = IIS3DWB_TIMESTAMP_TAG;
break;
default:
*val = IIS3DWB_XL_TAG;
break;
}
return ret;
}
/**
* @}
*
*/
/**
* @defgroup IIS3DWB_common
* @brief This section groups common useful functions.
* @{
*
*/
/**
* @brief Difference in percentage of the effective ODR (and timestamp rate)
* with respect to the typical.[set]
* Step: 0.15%. 8-bit format, 2's complement.
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of freq_fine in reg INTERNAL_FREQ_FINE
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_odr_cal_reg_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_internal_freq_fine_t internal_freq_fine;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_INTERNAL_FREQ_FINE,
(uint8_t *)&internal_freq_fine, 1);
if (ret == 0)
{
internal_freq_fine.freq_fine = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_INTERNAL_FREQ_FINE,
(uint8_t *)&internal_freq_fine, 1);
}
return ret;
}
/**
* @brief Difference in percentage of the effective ODR (and timestamp rate)
* with respect to the typical.[get]
* Step: 0.15%. 8-bit format, 2's complement.
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of freq_fine in reg INTERNAL_FREQ_FINE
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_odr_cal_reg_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_internal_freq_fine_t internal_freq_fine;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_INTERNAL_FREQ_FINE,
(uint8_t *)&internal_freq_fine, 1);
*val = internal_freq_fine.freq_fine;
return ret;
}
/**
* @brief Data-ready pulsed / letched mode.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of dataready_pulsed in
* reg COUNTER_BDR_REG1
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_data_ready_mode_set(const stmdev_ctx_t *ctx,
iis3dwb_dataready_pulsed_t val)
{
iis3dwb_counter_bdr_reg1_t counter_bdr_reg1;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_COUNTER_BDR_REG1,
(uint8_t *)&counter_bdr_reg1, 1);
if (ret == 0)
{
counter_bdr_reg1.dataready_pulsed = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_COUNTER_BDR_REG1,
(uint8_t *)&counter_bdr_reg1, 1);
}
return ret;
}
/**
* @brief Data-ready pulsed / letched mode.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of dataready_pulsed in
* reg COUNTER_BDR_REG1
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_data_ready_mode_get(const stmdev_ctx_t *ctx,
iis3dwb_dataready_pulsed_t *val)
{
iis3dwb_counter_bdr_reg1_t counter_bdr_reg1;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_COUNTER_BDR_REG1,
(uint8_t *)&counter_bdr_reg1, 1);
switch (counter_bdr_reg1.dataready_pulsed)
{
case IIS3DWB_DRDY_LATCHED:
*val = IIS3DWB_DRDY_LATCHED;
break;
case IIS3DWB_DRDY_PULSED:
*val = IIS3DWB_DRDY_PULSED;
break;
default:
*val = IIS3DWB_DRDY_LATCHED;
break;
}
return ret;
}
/**
* @brief Device Who am I.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param buff Buffer that stores data read
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_device_id_get(const stmdev_ctx_t *ctx, uint8_t *buff)
{
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_WHO_AM_I, buff, 1);
return ret;
}
/**
* @brief Software reset.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Value of sw_reset in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_reset_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
if (ret == 0)
{
ctrl3_c.sw_reset = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
}
return ret;
}
/**
* @brief Software reset.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Value of sw_reset in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_reset_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
*val = ctrl3_c.sw_reset;
return ret;
}
/**
* @brief Register address automatically incremented during a multiple byte
* access with a serial interface.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of if_inc in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_auto_increment_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
if (ret == 0)
{
ctrl3_c.if_inc = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
}
return ret;
}
/**
* @brief Register address automatically incremented during a multiple byte
* access with a serial interface.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of if_inc in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_auto_increment_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
*val = ctrl3_c.if_inc;
return ret;
}
/**
* @brief Reboot memory content.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Value of boot in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_boot_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
if (ret == 0)
{
ctrl3_c.boot = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
}
return ret;
}
/**
* @brief Reboot memory content.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Value of boot in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_boot_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
*val = ctrl3_c.boot;
return ret;
}
/**
* @brief Linear acceleration sensor self-test enable.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of st_xl in reg CTRL5_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_self_test_set(const stmdev_ctx_t *ctx,
iis3dwb_st_xl_t val)
{
iis3dwb_ctrl5_c_t ctrl5_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL5_C, (uint8_t *)&ctrl5_c, 1);
if (ret == 0)
{
ctrl5_c.st_xl = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL5_C, (uint8_t *)&ctrl5_c, 1);
}
return ret;
}
/**
* @brief Linear acceleration sensor self-test enable.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of st_xl in reg CTRL5_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_self_test_get(const stmdev_ctx_t *ctx,
iis3dwb_st_xl_t *val)
{
iis3dwb_ctrl5_c_t ctrl5_c;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL5_C, (uint8_t *)&ctrl5_c, 1);
switch (ctrl5_c.st_xl)
{
case IIS3DWB_XL_ST_DISABLE:
*val = IIS3DWB_XL_ST_DISABLE;
break;
case IIS3DWB_XL_ST_POSITIVE:
*val = IIS3DWB_XL_ST_POSITIVE;
break;
case IIS3DWB_XL_ST_NEGATIVE:
*val = IIS3DWB_XL_ST_NEGATIVE;
break;
default:
*val = IIS3DWB_XL_ST_DISABLE;
break;
}
return ret;
}
/**
* @}
*
*/
/**
* @defgroup IIS3DWB_filters
* @brief This section group all the functions concerning the
* filters configuration
* @{
*
*/
/**
* @brief Mask DRDY on pin (both XL & Gyro) until filter settling ends
* (XL and Gyro independently masked).[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of drdy_mask in reg CTRL4_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_filter_settling_mask_set(const stmdev_ctx_t *ctx,
uint8_t val)
{
iis3dwb_ctrl4_c_t ctrl4_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL4_C, (uint8_t *)&ctrl4_c, 1);
if (ret == 0)
{
ctrl4_c.drdy_mask = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL4_C, (uint8_t *)&ctrl4_c, 1);
}
return ret;
}
/**
* @brief Mask DRDY on pin (both XL & Gyro) until filter settling ends
* (XL and Gyro independently masked).[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of drdy_mask in reg CTRL4_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_filter_settling_mask_get(const stmdev_ctx_t *ctx,
uint8_t *val)
{
iis3dwb_ctrl4_c_t ctrl4_c;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL4_C, (uint8_t *)&ctrl4_c, 1);
*val = ctrl4_c.drdy_mask;
return ret;
}
/**
* @brief Accelerometer filter selection on output.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change filter selection on output.
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_filt_path_on_out_set(const stmdev_ctx_t *ctx,
iis3dwb_filt_xl_en_t val)
{
iis3dwb_ctrl1_xl_t ctrl1_xl;
iis3dwb_ctrl8_xl_t ctrl8_xl;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL1_XL, (uint8_t *)&ctrl1_xl, 1);
if (ret == 0)
{
ctrl1_xl.lpf2_xl_en = ((uint8_t)val & 0x80U) >> 7;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL1_XL, (uint8_t *)&ctrl1_xl, 1);
}
if (ret == 0)
{
ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL8_XL, (uint8_t *)&ctrl8_xl, 1);
}
if (ret == 0)
{
ctrl8_xl.fds = ((uint8_t)val & 0x10U) >> 4;
ctrl8_xl.hp_ref_mode_xl = ((uint8_t)val & 0x20U) >> 5;
ctrl8_xl.hpcf_xl = (uint8_t)val & 0x07U;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL8_XL, (uint8_t *)&ctrl8_xl, 1);
}
return ret;
}
/**
* @brief Accelerometer filter selection on output.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get filter selection on output.
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_filt_path_on_out_get(const stmdev_ctx_t *ctx,
iis3dwb_filt_xl_en_t *val)
{
iis3dwb_ctrl1_xl_t ctrl1_xl;
iis3dwb_ctrl8_xl_t ctrl8_xl;
*val = IIS3DWB_HP_REF_MODE;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL1_XL, (uint8_t *)&ctrl1_xl, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL8_XL, (uint8_t *)&ctrl8_xl, 1);
if (ret != 0) { return ret; }
switch ((ctrl1_xl.lpf2_xl_en << 7) + (ctrl8_xl.hp_ref_mode_xl << 5) +
(ctrl8_xl.fds << 4) + ctrl8_xl.hpcf_xl)
{
case IIS3DWB_HP_REF_MODE:
*val = IIS3DWB_HP_REF_MODE;
break;
case IIS3DWB_HP_ODR_DIV_10:
*val = IIS3DWB_HP_ODR_DIV_10;
break;
case IIS3DWB_HP_ODR_DIV_20:
*val = IIS3DWB_HP_ODR_DIV_20;
break;
case IIS3DWB_HP_ODR_DIV_45:
*val = IIS3DWB_HP_ODR_DIV_45;
break;
case IIS3DWB_HP_ODR_DIV_100:
*val = IIS3DWB_HP_ODR_DIV_100;
break;
case IIS3DWB_HP_ODR_DIV_200:
*val = IIS3DWB_HP_ODR_DIV_200;
break;
case IIS3DWB_HP_ODR_DIV_400:
*val = IIS3DWB_HP_ODR_DIV_400;
break;
case IIS3DWB_HP_ODR_DIV_800:
*val = IIS3DWB_HP_ODR_DIV_800;
break;
case IIS3DWB_LP_ODR_DIV_4:
*val = IIS3DWB_LP_ODR_DIV_4;
break;
case IIS3DWB_LP_6k3Hz:
*val = IIS3DWB_LP_6k3Hz;
break;
case IIS3DWB_LP_ODR_DIV_10:
*val = IIS3DWB_LP_ODR_DIV_10;
break;
case IIS3DWB_LP_ODR_DIV_20:
*val = IIS3DWB_LP_ODR_DIV_20;
break;
case IIS3DWB_LP_ODR_DIV_45:
*val = IIS3DWB_LP_ODR_DIV_45;
break;
case IIS3DWB_LP_ODR_DIV_100:
*val = IIS3DWB_LP_ODR_DIV_100;
break;
case IIS3DWB_LP_ODR_DIV_200:
*val = IIS3DWB_LP_ODR_DIV_200;
break;
case IIS3DWB_LP_ODR_DIV_400:
*val = IIS3DWB_LP_ODR_DIV_400;
break;
case IIS3DWB_LP_ODR_DIV_800:
*val = IIS3DWB_LP_ODR_DIV_800;
break;
default:
*val = IIS3DWB_HP_REF_MODE;
break;
}
return ret;
}
/**
* @brief Enables accelerometer LPF2 and HPF fast-settling mode.
* The filter sets the second samples after writing this bit.
* Active only during device exit from powerdown mode.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of fastsettl_mode_xl in reg CTRL8_XL
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_fast_settling_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_ctrl8_xl_t ctrl8_xl;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL8_XL, (uint8_t *)&ctrl8_xl, 1);
if (ret == 0)
{
ctrl8_xl.fastsettl_mode_xl = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL8_XL,
(uint8_t *)&ctrl8_xl, 1);
}
return ret;
}
/**
* @brief Enables accelerometer LPF2 and HPF fast-settling mode.
* The filter sets the second samples after writing
* this bit. Active only during device exit from powerdown mode.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of fastsettl_mode_xl in reg CTRL8_XL
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_fast_settling_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_ctrl8_xl_t ctrl8_xl;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL8_XL, (uint8_t *)&ctrl8_xl, 1);
*val = ctrl8_xl.fastsettl_mode_xl;
return ret;
}
/**
* @brief HPF or SLOPE filter selection on wake-up and Activity/Inactivity
* functions.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of slope_fds in reg TAP_CFG0
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_hp_path_internal_set(const stmdev_ctx_t *ctx,
iis3dwb_slope_fds_t val)
{
iis3dwb_slope_en_t int_cfg0;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_SLOPE_EN, (uint8_t *)&int_cfg0, 1);
if (ret == 0)
{
int_cfg0.slope_fds = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_SLOPE_EN,
(uint8_t *)&int_cfg0, 1);
}
return ret;
}
/**
* @brief HPF or SLOPE filter selection on wake-up and Activity/Inactivity
* functions.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of slope_fds in reg TAP_CFG0
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_hp_path_internal_get(const stmdev_ctx_t *ctx,
iis3dwb_slope_fds_t *val)
{
iis3dwb_slope_en_t int_cfg0;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_SLOPE_EN, (uint8_t *)&int_cfg0, 1);
switch (int_cfg0.slope_fds)
{
case IIS3DWB_USE_SLOPE:
*val = IIS3DWB_USE_SLOPE;
break;
case IIS3DWB_USE_HPF:
*val = IIS3DWB_USE_HPF;
break;
default:
*val = IIS3DWB_USE_SLOPE;
break;
}
return ret;
}
/**
* @}
*
*/
/**
* @defgroup IIS3DWB_ main_serial_interface
* @brief This section groups all the functions concerning main
* serial interface management (not auxiliary)
* @{
*
*/
/**
* @brief Connect/Disconnect SDO/SA0 internal pull-up.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of sdo_pu_en in reg PIN_CTRL
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_sdo_sa0_mode_set(const stmdev_ctx_t *ctx,
iis3dwb_sdo_pu_en_t val)
{
iis3dwb_pin_ctrl_t pin_ctrl;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_PIN_CTRL, (uint8_t *)&pin_ctrl, 1);
if (ret == 0)
{
pin_ctrl.sdo_pu_en = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_PIN_CTRL, (uint8_t *)&pin_ctrl, 1);
}
return ret;
}
/**
* @brief Connect/Disconnect SDO/SA0 internal pull-up.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of sdo_pu_en in reg PIN_CTRL
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_sdo_sa0_mode_get(const stmdev_ctx_t *ctx,
iis3dwb_sdo_pu_en_t *val)
{
iis3dwb_pin_ctrl_t pin_ctrl;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_PIN_CTRL, (uint8_t *)&pin_ctrl, 1);
switch (pin_ctrl.sdo_pu_en)
{
case IIS3DWB_PULL_UP_DISC:
*val = IIS3DWB_PULL_UP_DISC;
break;
case IIS3DWB_PULL_UP_CONNECT:
*val = IIS3DWB_PULL_UP_CONNECT;
break;
default:
*val = IIS3DWB_PULL_UP_DISC;
break;
}
return ret;
}
/**
* @brief SPI Serial Interface Mode selection.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of sim in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_spi_mode_set(const stmdev_ctx_t *ctx, iis3dwb_sim_t val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
if (ret == 0)
{
ctrl3_c.sim = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
}
return ret;
}
/**
* @brief SPI Serial Interface Mode selection.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of sim in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_spi_mode_get(const stmdev_ctx_t *ctx, iis3dwb_sim_t *val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
switch (ctrl3_c.sim)
{
case IIS3DWB_SPI_4_WIRE:
*val = IIS3DWB_SPI_4_WIRE;
break;
case IIS3DWB_SPI_3_WIRE:
*val = IIS3DWB_SPI_3_WIRE;
break;
default:
*val = IIS3DWB_SPI_4_WIRE;
break;
}
return ret;
}
/**
* @brief Disable / Enable I2C interface.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of i2c_disable in reg CTRL4_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_i2c_interface_set(const stmdev_ctx_t *ctx,
iis3dwb_i2c_disable_t val)
{
iis3dwb_ctrl4_c_t ctrl4_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL4_C, (uint8_t *)&ctrl4_c, 1);
if (ret == 0)
{
ctrl4_c.i2c_disable = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL4_C, (uint8_t *)&ctrl4_c, 1);
}
return ret;
}
/**
* @brief Disable / Enable I2C interface.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of i2c reg CTRL4_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_i2c_interface_get(const stmdev_ctx_t *ctx,
iis3dwb_i2c_disable_t *val)
{
iis3dwb_ctrl4_c_t ctrl4_c;
const int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL4_C, (uint8_t *)&ctrl4_c, 1);
switch (ctrl4_c.i2c_disable)
{
case IIS3DWB_I2C_ENABLE:
*val = IIS3DWB_I2C_ENABLE;
break;
case IIS3DWB_I2C_DISABLE:
*val = IIS3DWB_I2C_DISABLE;
break;
default:
*val = IIS3DWB_I2C_ENABLE;
break;
}
return ret;
}
/**
* @}
*
*/
/**
* @defgroup IIS3DWB_interrupt_pins
* @brief This section groups all the functions that manage
* interrupt pins
* @{
*
*/
/**
* @brief Select the signal that need to route on int1 pad[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val the signals to route on int1 pin.
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_pin_int1_route_set(const stmdev_ctx_t *ctx,
iis3dwb_pin_int1_route_t *val)
{
iis3dwb_int1_ctrl_t int1_ctrl;
iis3dwb_slope_en_t slope_en;
iis3dwb_md1_cfg_t md1_cfg;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_INT1_CTRL, (uint8_t *)&int1_ctrl, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_read_reg(ctx, IIS3DWB_MD1_CFG, (uint8_t *)&md1_cfg, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_read_reg(ctx, IIS3DWB_SLOPE_EN, (uint8_t *)&slope_en, 1);
if (ret != 0) { return ret; }
int1_ctrl.int1_drdy_xl = val->drdy_xl;
int1_ctrl.int1_boot = val->boot;
int1_ctrl.int1_fifo_th = val->fifo_th;
int1_ctrl.int1_fifo_ovr = val->fifo_ovr;
int1_ctrl.int1_fifo_full = val->fifo_full;
int1_ctrl.int1_cnt_bdr = val->fifo_bdr;
md1_cfg.int1_wu = val->wake_up;
md1_cfg.int1_sleep_change = val->sleep_change | val->sleep_status;
slope_en.sleep_status_on_int = val->sleep_status;
ret = iis3dwb_write_reg(ctx, IIS3DWB_INT1_CTRL, (uint8_t *)&int1_ctrl, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_write_reg(ctx, IIS3DWB_MD1_CFG, (uint8_t *)&md1_cfg, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_write_reg(ctx, IIS3DWB_SLOPE_EN, (uint8_t *)&slope_en, 1);
return ret;
}
/**
* @brief Select the signal that need to route on int1 pad.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val the signals that are routed on int1 pin.(ptr)
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_pin_int1_route_get(const stmdev_ctx_t *ctx,
iis3dwb_pin_int1_route_t *val)
{
iis3dwb_int1_ctrl_t int1_ctrl;
iis3dwb_slope_en_t slope_en;
iis3dwb_md1_cfg_t md1_cfg;
memset(val, 0, sizeof(iis3dwb_pin_int1_route_t));
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_INT1_CTRL, (uint8_t *)&int1_ctrl, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_read_reg(ctx, IIS3DWB_MD1_CFG, (uint8_t *)&md1_cfg, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_read_reg(ctx, IIS3DWB_SLOPE_EN, (uint8_t *)&slope_en, 1);
if (ret != 0) { return ret; }
val->drdy_xl = int1_ctrl.int1_drdy_xl;
val->boot = int1_ctrl.int1_boot;
val->fifo_th = int1_ctrl.int1_fifo_th;
val->fifo_ovr = int1_ctrl.int1_fifo_ovr;
val->fifo_full = int1_ctrl.int1_fifo_full;
val->fifo_bdr = int1_ctrl.int1_cnt_bdr;
val->wake_up = md1_cfg.int1_wu;
if (slope_en.sleep_status_on_int == PROPERTY_ENABLE)
{
val->sleep_status = PROPERTY_ENABLE;
val->sleep_change = PROPERTY_DISABLE;
}
else
{
val->sleep_change = md1_cfg.int1_sleep_change;
}
return ret;
}
/**
* @brief Select the signal that need to route on int2 pad[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val the signals to route on int2 pin.
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_pin_int2_route_set(const stmdev_ctx_t *ctx,
iis3dwb_pin_int2_route_t *val)
{
iis3dwb_int2_ctrl_t int2_ctrl;
iis3dwb_slope_en_t slope_en;
iis3dwb_md2_cfg_t md2_cfg;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_INT2_CTRL, (uint8_t *)&int2_ctrl, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_read_reg(ctx, IIS3DWB_MD2_CFG, (uint8_t *)&md2_cfg, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_read_reg(ctx, IIS3DWB_SLOPE_EN, (uint8_t *)&slope_en, 1);
if (ret != 0) { return ret; }
int2_ctrl.int2_drdy_xl = val->drdy_xl;
int2_ctrl.int2_drdy_temp = val->drdy_temp;
int2_ctrl.int2_fifo_th = val->fifo_th;
int2_ctrl.int2_fifo_ovr = val->fifo_ovr;
int2_ctrl.int2_fifo_full = val->fifo_full;
int2_ctrl.int2_cnt_bdr = val->fifo_bdr;
md2_cfg.int2_timestamp = val->timestamp;
md2_cfg.int2_wu = val->wake_up;
md2_cfg.int2_sleep_change = val->sleep_change | val->sleep_status;
slope_en.sleep_status_on_int = val->sleep_status;
ret = iis3dwb_write_reg(ctx, IIS3DWB_INT2_CTRL, (uint8_t *)&int2_ctrl, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_write_reg(ctx, IIS3DWB_MD2_CFG, (uint8_t *)&md2_cfg, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_write_reg(ctx, IIS3DWB_SLOPE_EN, (uint8_t *)&slope_en, 1);
return ret;
}
/**
* @brief Select the signal that need to route on int2 pad.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val the signals that are routed on int2 pin.(ptr)
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_pin_int2_route_get(const stmdev_ctx_t *ctx,
iis3dwb_pin_int2_route_t *val)
{
iis3dwb_int2_ctrl_t int2_ctrl;
iis3dwb_slope_en_t slope_en;
iis3dwb_md2_cfg_t md2_cfg;
memset(val, 0, sizeof(iis3dwb_pin_int2_route_t));
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_INT2_CTRL, (uint8_t *)&int2_ctrl, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_read_reg(ctx, IIS3DWB_MD2_CFG, (uint8_t *)&md2_cfg, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_read_reg(ctx, IIS3DWB_SLOPE_EN, (uint8_t *)&slope_en, 1);
if (ret != 0) { return ret; }
val->drdy_xl = int2_ctrl.int2_drdy_xl;
val->drdy_temp = int2_ctrl.int2_drdy_temp;
val->fifo_th = int2_ctrl.int2_fifo_th;
val->fifo_ovr = int2_ctrl.int2_fifo_ovr;
val->fifo_full = int2_ctrl.int2_fifo_full;
val->fifo_bdr = int2_ctrl.int2_cnt_bdr;
val->timestamp = md2_cfg.int2_timestamp;
val->wake_up = md2_cfg.int2_wu;
if (slope_en.sleep_status_on_int == PROPERTY_ENABLE)
{
val->sleep_status = PROPERTY_ENABLE;
val->sleep_change = PROPERTY_DISABLE;
}
else
{
val->sleep_change = md2_cfg.int2_sleep_change;
}
return ret;
}
/**
* @brief Push-pull/open drain selection on interrupt pads.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of pp_od in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_pin_mode_set(const stmdev_ctx_t *ctx, iis3dwb_pp_od_t val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
if (ret == 0)
{
ctrl3_c.pp_od = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
}
return ret;
}
/**
* @brief Push-pull/open drain selection on interrupt pads.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of pp_od in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_pin_mode_get(const stmdev_ctx_t *ctx, iis3dwb_pp_od_t *val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
switch (ctrl3_c.pp_od)
{
case IIS3DWB_PUSH_PULL:
*val = IIS3DWB_PUSH_PULL;
break;
case IIS3DWB_OPEN_DRAIN:
*val = IIS3DWB_OPEN_DRAIN;
break;
default:
*val = IIS3DWB_PUSH_PULL;
break;
}
return ret;
}
/**
* @brief Interrupt active-high/low.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of h_lactive in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_pin_polarity_set(const stmdev_ctx_t *ctx,
iis3dwb_h_lactive_t val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
if (ret == 0)
{
ctrl3_c.h_lactive = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
}
return ret;
}
/**
* @brief Interrupt active-high/low.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of h_lactive in reg CTRL3_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_pin_polarity_get(const stmdev_ctx_t *ctx,
iis3dwb_h_lactive_t *val)
{
iis3dwb_ctrl3_c_t ctrl3_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL3_C, (uint8_t *)&ctrl3_c, 1);
switch (ctrl3_c.h_lactive)
{
case IIS3DWB_ACTIVE_HIGH:
*val = IIS3DWB_ACTIVE_HIGH;
break;
case IIS3DWB_ACTIVE_LOW:
*val = IIS3DWB_ACTIVE_LOW;
break;
default:
*val = IIS3DWB_ACTIVE_HIGH;
break;
}
return ret;
}
/**
* @brief All interrupt signals become available on INT1 pin.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of int2_on_int1 in reg CTRL4_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_all_on_int1_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_ctrl4_c_t ctrl4_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL4_C, (uint8_t *)&ctrl4_c, 1);
if (ret == 0)
{
ctrl4_c.int2_on_int1 = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_CTRL4_C, (uint8_t *)&ctrl4_c, 1);
}
return ret;
}
/**
* @brief All interrupt signals become available on INT1 pin.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of int2_on_int1 in reg CTRL4_C
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_all_on_int1_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_ctrl4_c_t ctrl4_c;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_CTRL4_C, (uint8_t *)&ctrl4_c, 1);
*val = ctrl4_c.int2_on_int1;
return ret;
}
/**
* @brief All interrupt signals notification mode.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of lir in reg SLOPE_EN
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_int_notification_set(const stmdev_ctx_t *ctx,
iis3dwb_lir_t val)
{
iis3dwb_slope_en_t slope_en;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_SLOPE_EN, (uint8_t *)&slope_en, 1);
if (ret == 0)
{
slope_en.lir = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_SLOPE_EN, (uint8_t *)&slope_en, 1);
}
return ret;
}
/**
* @brief All interrupt signals notification mode.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of lir in reg SLOPE_EN
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_int_notification_get(const stmdev_ctx_t *ctx,
iis3dwb_lir_t *val)
{
iis3dwb_slope_en_t slope_en;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_SLOPE_EN, (uint8_t *)&slope_en, 1);
switch (slope_en.lir)
{
case IIS3DWB_INT_PULSED:
*val = IIS3DWB_INT_PULSED;
break;
case IIS3DWB_INT_LATCHED:
*val = IIS3DWB_INT_LATCHED;
break;
default:
*val = IIS3DWB_INT_PULSED;
break;
}
return ret;
}
/**
* @}
*
*/
/**
* @defgroup IIS3DWB_Wake_Up_event
* @brief This section groups all the functions that manage the
* Wake Up event generation.
* @{
*
*/
/**
* @brief Weight of 1 LSB of wakeup threshold.[set]
* 0: 1 LSB =FS_XL / 64
* 1: 1 LSB = FS_XL / 256
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of wake_ths_w in reg WAKE_UP_DUR
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_wkup_ths_weight_set(const stmdev_ctx_t *ctx,
iis3dwb_wake_ths_w_t val)
{
iis3dwb_wake_up_dur_t wake_up_dur;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_WAKE_UP_DUR,
(uint8_t *)&wake_up_dur, 1);
if (ret == 0)
{
wake_up_dur.wake_ths_w = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_WAKE_UP_DUR,
(uint8_t *)&wake_up_dur, 1);
}
return ret;
}
/**
* @brief Weight of 1 LSB of wakeup threshold.[get]
* 0: 1 LSB =FS_XL / 64
* 1: 1 LSB = FS_XL / 256
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of wake_ths_w in reg WAKE_UP_DUR
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_wkup_ths_weight_get(const stmdev_ctx_t *ctx,
iis3dwb_wake_ths_w_t *val)
{
iis3dwb_wake_up_dur_t wake_up_dur;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_WAKE_UP_DUR,
(uint8_t *)&wake_up_dur, 1);
switch (wake_up_dur.wake_ths_w)
{
case IIS3DWB_LSb_FS_DIV_64:
*val = IIS3DWB_LSb_FS_DIV_64;
break;
case IIS3DWB_LSb_FS_DIV_256:
*val = IIS3DWB_LSb_FS_DIV_256;
break;
default:
*val = IIS3DWB_LSb_FS_DIV_64;
break;
}
return ret;
}
/**
* @brief Threshold for wakeup: 1 LSB weight depends on WAKE_THS_W in
* WAKE_UP_DUR. This function is mandatory for activate the
* wake up (and activity/inactivity) logic.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of wk_ths in reg WAKE_UP_THS
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_wkup_threshold_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_interrupts_en_t interrupts_en;
iis3dwb_wake_up_ths_t wake_up_ths;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_WAKE_UP_THS,
(uint8_t *)&wake_up_ths, 1);
if (ret == 0)
{
wake_up_ths.wk_ths = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_WAKE_UP_THS,
(uint8_t *)&wake_up_ths, 1);
}
if (ret == 0)
{
ret = iis3dwb_read_reg(ctx, IIS3DWB_INTERRUPTS_EN,
(uint8_t *)&interrupts_en, 1);
}
if (ret == 0)
{
interrupts_en.interrupts_enable = PROPERTY_ENABLE;
ret = iis3dwb_write_reg(ctx, IIS3DWB_INTERRUPTS_EN,
(uint8_t *)&interrupts_en, 1);
}
return ret;
}
/**
* @brief Threshold for wakeup: 1 LSB weight depends on WAKE_THS_W in
* WAKE_UP_DUR.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of wk_ths in reg WAKE_UP_THS
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_wkup_threshold_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_wake_up_ths_t wake_up_ths;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_WAKE_UP_THS,
(uint8_t *)&wake_up_ths, 1);
*val = wake_up_ths.wk_ths;
return ret;
}
/**
* @brief Wake up duration event( 1LSb = 1 / ODR ).[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of usr_off_on_wu in reg WAKE_UP_THS
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_usr_offset_on_wkup_set(const stmdev_ctx_t *ctx,
uint8_t val)
{
iis3dwb_wake_up_ths_t wake_up_ths;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_WAKE_UP_THS,
(uint8_t *)&wake_up_ths, 1);
if (ret == 0)
{
wake_up_ths.usr_off_on_wu = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_WAKE_UP_THS,
(uint8_t *)&wake_up_ths, 1);
}
return ret;
}
/**
* @brief Wake up duration event( 1LSb = 1 / ODR ).[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of usr_off_on_wu in reg WAKE_UP_THS
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_xl_usr_offset_on_wkup_get(const stmdev_ctx_t *ctx,
uint8_t *val)
{
iis3dwb_wake_up_ths_t wake_up_ths;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_WAKE_UP_THS,
(uint8_t *)&wake_up_ths, 1);
*val = wake_up_ths.usr_off_on_wu;
return ret;
}
/**
* @brief Wake up duration event(1LSb = 1 / ODR).[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of wake_dur in reg WAKE_UP_DUR
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_wkup_dur_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_wake_up_dur_t wake_up_dur;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_WAKE_UP_DUR,
(uint8_t *)&wake_up_dur, 1);
if (ret == 0)
{
wake_up_dur.wake_dur = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_WAKE_UP_DUR,
(uint8_t *)&wake_up_dur, 1);
}
return ret;
}
/**
* @brief Wake up duration event(1LSb = 1 / ODR).[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of wake_dur in reg WAKE_UP_DUR
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_wkup_dur_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_wake_up_dur_t wake_up_dur;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_WAKE_UP_DUR,
(uint8_t *)&wake_up_dur, 1);
*val = wake_up_dur.wake_dur;
return ret;
}
/**
* @}
*
*/
/**
* @defgroup IIS3DWB_ Activity/Inactivity_detection
* @brief This section groups all the functions concerning
* activity/inactivity detection.
* @{
*
*/
/**
* @brief Duration to go in sleep mode (1 LSb = 512 / ODR).[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of sleep_dur in reg WAKE_UP_DUR
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_act_sleep_dur_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_wake_up_dur_t wake_up_dur;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_WAKE_UP_DUR,
(uint8_t *)&wake_up_dur, 1);
if (ret == 0)
{
wake_up_dur.sleep_dur = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_WAKE_UP_DUR,
(uint8_t *)&wake_up_dur, 1);
}
return ret;
}
/**
* @brief Duration to go in sleep mode.(1 LSb = 512 / ODR).[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of sleep_dur in reg WAKE_UP_DUR
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_act_sleep_dur_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_wake_up_dur_t wake_up_dur;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_WAKE_UP_DUR,
(uint8_t *)&wake_up_dur, 1);
*val = wake_up_dur.sleep_dur;
return ret;
}
/**
* @}
*
*/
/**
* @defgroup IIS3DWB_fifo
* @brief This section group all the functions concerning
* the fifo usage
* @{
*
*/
/**
* @brief FIFO watermark level selection.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of wtm in reg FIFO_CTRL1
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_watermark_set(const stmdev_ctx_t *ctx, uint16_t val)
{
iis3dwb_fifo_ctrl1_t fifo_ctrl1;
iis3dwb_fifo_ctrl2_t fifo_ctrl2;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_CTRL2,
(uint8_t *)&fifo_ctrl2, 1);
if (ret == 0)
{
fifo_ctrl1.wtm = (uint8_t)(0x00FFU & val);
ret = iis3dwb_write_reg(ctx, IIS3DWB_FIFO_CTRL1,
(uint8_t *)&fifo_ctrl1, 1);
}
if (ret == 0)
{
fifo_ctrl2.wtm = (uint8_t)((0x0100U & val) >> 8);
ret = iis3dwb_write_reg(ctx, IIS3DWB_FIFO_CTRL2,
(uint8_t *)&fifo_ctrl2, 1);
}
return ret;
}
/**
* @brief FIFO watermark level selection.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of wtm in reg FIFO_CTRL1
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_watermark_get(const stmdev_ctx_t *ctx, uint16_t *val)
{
iis3dwb_fifo_ctrl1_t fifo_ctrl1;
iis3dwb_fifo_ctrl2_t fifo_ctrl2;
*val = 0;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_CTRL2,
(uint8_t *)&fifo_ctrl2, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_CTRL1,
(uint8_t *)&fifo_ctrl1, 1);
*val = fifo_ctrl2.wtm;
*val = *val << 8;
*val += fifo_ctrl1.wtm;
return ret;
}
/**
* @brief Sensing chain FIFO stop values memorization at threshold
* level.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of stop_on_wtm in reg FIFO_CTRL2
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_stop_on_wtm_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_fifo_ctrl2_t fifo_ctrl2;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_CTRL2,
(uint8_t *)&fifo_ctrl2, 1);
if (ret == 0)
{
fifo_ctrl2.stop_on_wtm = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_FIFO_CTRL2,
(uint8_t *)&fifo_ctrl2, 1);
}
return ret;
}
/**
* @brief Sensing chain FIFO stop values memorization at threshold
* level.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of stop_on_wtm in reg FIFO_CTRL2
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_stop_on_wtm_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_fifo_ctrl2_t fifo_ctrl2;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_CTRL2,
(uint8_t *)&fifo_ctrl2, 1);
*val = fifo_ctrl2.stop_on_wtm;
return ret;
}
/**
* @brief Selects Batching Data Rate (writing frequency in FIFO)
* for accelerometer data.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of bdr_xl in reg FIFO_CTRL3
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_xl_batch_set(const stmdev_ctx_t *ctx,
iis3dwb_bdr_xl_t val)
{
iis3dwb_fifo_ctrl3_t fifo_ctrl3;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_CTRL3,
(uint8_t *)&fifo_ctrl3, 1);
if (ret == 0)
{
fifo_ctrl3.bdr_xl = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_FIFO_CTRL3,
(uint8_t *)&fifo_ctrl3, 1);
}
return ret;
}
/**
* @brief Selects Batching Data Rate (writing frequency in FIFO)
* for accelerometer data.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of bdr_xl in reg FIFO_CTRL3
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_xl_batch_get(const stmdev_ctx_t *ctx,
iis3dwb_bdr_xl_t *val)
{
iis3dwb_fifo_ctrl3_t fifo_ctrl3;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_CTRL3,
(uint8_t *)&fifo_ctrl3, 1);
switch (fifo_ctrl3.bdr_xl)
{
case IIS3DWB_XL_NOT_BATCHED:
*val = IIS3DWB_XL_NOT_BATCHED;
break;
case IIS3DWB_XL_BATCHED_AT_26k7Hz:
*val = IIS3DWB_XL_BATCHED_AT_26k7Hz;
break;
default:
*val = IIS3DWB_XL_NOT_BATCHED;
break;
}
return ret;
}
/**
* @brief FIFO mode selection.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of fifo_mode in reg FIFO_CTRL4
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_mode_set(const stmdev_ctx_t *ctx,
iis3dwb_fifo_mode_t val)
{
iis3dwb_fifo_ctrl4_t fifo_ctrl4;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_CTRL4,
(uint8_t *)&fifo_ctrl4, 1);
if (ret == 0)
{
fifo_ctrl4.fifo_mode = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_FIFO_CTRL4,
(uint8_t *)&fifo_ctrl4, 1);
}
return ret;
}
/**
* @brief FIFO mode selection.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of fifo_mode in reg FIFO_CTRL4
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_mode_get(const stmdev_ctx_t *ctx,
iis3dwb_fifo_mode_t *val)
{
iis3dwb_fifo_ctrl4_t fifo_ctrl4;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_CTRL4,
(uint8_t *)&fifo_ctrl4, 1);
switch (fifo_ctrl4.fifo_mode)
{
case IIS3DWB_BYPASS_MODE:
*val = IIS3DWB_BYPASS_MODE;
break;
case IIS3DWB_FIFO_MODE:
*val = IIS3DWB_FIFO_MODE;
break;
case IIS3DWB_STREAM_TO_FIFO_MODE:
*val = IIS3DWB_STREAM_TO_FIFO_MODE;
break;
case IIS3DWB_BYPASS_TO_STREAM_MODE:
*val = IIS3DWB_BYPASS_TO_STREAM_MODE;
break;
case IIS3DWB_STREAM_MODE:
*val = IIS3DWB_STREAM_MODE;
break;
case IIS3DWB_BYPASS_TO_FIFO_MODE:
*val = IIS3DWB_BYPASS_TO_FIFO_MODE;
break;
default:
*val = IIS3DWB_BYPASS_MODE;
break;
}
return ret;
}
/**
* @brief Selects Batching Data Rate (writing frequency in FIFO)
* for temperature data.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of odr_t_batch in reg FIFO_CTRL4
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_temp_batch_set(const stmdev_ctx_t *ctx,
iis3dwb_odr_t_batch_t val)
{
iis3dwb_fifo_ctrl4_t fifo_ctrl4;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_CTRL4,
(uint8_t *)&fifo_ctrl4, 1);
if (ret == 0)
{
fifo_ctrl4.odr_t_batch = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_FIFO_CTRL4,
(uint8_t *)&fifo_ctrl4, 1);
}
return ret;
}
/**
* @brief Selects Batching Data Rate (writing frequency in FIFO)
* for temperature data.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of odr_t_batch in reg FIFO_CTRL4
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_temp_batch_get(const stmdev_ctx_t *ctx,
iis3dwb_odr_t_batch_t *val)
{
iis3dwb_fifo_ctrl4_t fifo_ctrl4;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_CTRL4,
(uint8_t *)&fifo_ctrl4, 1);
switch (fifo_ctrl4.odr_t_batch)
{
case IIS3DWB_TEMP_NOT_BATCHED:
*val = IIS3DWB_TEMP_NOT_BATCHED;
break;
case IIS3DWB_TEMP_BATCHED_AT_104Hz:
*val = IIS3DWB_TEMP_BATCHED_AT_104Hz;
break;
default:
*val = IIS3DWB_TEMP_NOT_BATCHED;
break;
}
return ret;
}
/**
* @brief Selects decimation for timestamp batching in FIFO.
* Writing rate will be the maximum rate between XL and
* GYRO BDR divided by decimation decoder.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of odr_ts_batch in reg FIFO_CTRL4
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_timestamp_batch_set(const stmdev_ctx_t *ctx,
iis3dwb_fifo_timestamp_batch_t val)
{
iis3dwb_fifo_ctrl4_t fifo_ctrl4;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_CTRL4,
(uint8_t *)&fifo_ctrl4, 1);
if (ret == 0)
{
fifo_ctrl4.odr_ts_batch = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_FIFO_CTRL4,
(uint8_t *)&fifo_ctrl4, 1);
}
return ret;
}
/**
* @brief Selects decimation for timestamp batching in FIFO.
* Writing rate will be the maximum rate between XL and
* GYRO BDR divided by decimation decoder.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Get the values of odr_ts_batch in reg
* FIFO_CTRL4
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_timestamp_batch_get(const stmdev_ctx_t *ctx,
iis3dwb_fifo_timestamp_batch_t *val)
{
iis3dwb_fifo_ctrl4_t fifo_ctrl4;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_CTRL4,
(uint8_t *)&fifo_ctrl4, 1);
switch (fifo_ctrl4.odr_ts_batch)
{
case IIS3DWB_NO_DECIMATION:
*val = IIS3DWB_NO_DECIMATION;
break;
case IIS3DWB_DEC_1:
*val = IIS3DWB_DEC_1;
break;
case IIS3DWB_DEC_8:
*val = IIS3DWB_DEC_8;
break;
case IIS3DWB_DEC_32:
*val = IIS3DWB_DEC_32;
break;
default:
*val = IIS3DWB_NO_DECIMATION;
break;
}
return ret;
}
/**
* @brief Resets the internal counter of batching events for a single sensor.
* This bit is automatically reset to zero if it was set to ‘1’.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of rst_counter_bdr in reg COUNTER_BDR_REG1
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_rst_batch_counter_set(const stmdev_ctx_t *ctx, uint8_t val)
{
iis3dwb_counter_bdr_reg1_t counter_bdr_reg1;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_COUNTER_BDR_REG1,
(uint8_t *)&counter_bdr_reg1, 1);
if (ret == 0)
{
counter_bdr_reg1.rst_counter_bdr = (uint8_t)val;
ret = iis3dwb_write_reg(ctx, IIS3DWB_COUNTER_BDR_REG1,
(uint8_t *)&counter_bdr_reg1, 1);
}
return ret;
}
/**
* @brief Resets the internal counter of batching events for a single sensor.
* This bit is automatically reset to zero if it was set to ‘1’.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of rst_counter_bdr in reg COUNTER_BDR_REG1
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_rst_batch_counter_get(const stmdev_ctx_t *ctx, uint8_t *val)
{
iis3dwb_counter_bdr_reg1_t counter_bdr_reg1;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_COUNTER_BDR_REG1,
(uint8_t *)&counter_bdr_reg1, 1);
*val = counter_bdr_reg1.rst_counter_bdr;
return ret;
}
/**
* @brief Batch data rate counter.[set]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of cnt_bdr_th in reg COUNTER_BDR_REG2
* and COUNTER_BDR_REG1.
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_batch_counter_threshold_set(const stmdev_ctx_t *ctx,
uint16_t val)
{
iis3dwb_counter_bdr_reg2_t counter_bdr_reg1;
iis3dwb_counter_bdr_reg2_t counter_bdr_reg2;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_COUNTER_BDR_REG1,
(uint8_t *)&counter_bdr_reg1, 1);
if (ret == 0)
{
counter_bdr_reg1.cnt_bdr_th = (uint8_t)((0x0700U & val) >> 8);
ret = iis3dwb_write_reg(ctx, IIS3DWB_COUNTER_BDR_REG1,
(uint8_t *)&counter_bdr_reg1, 1);
}
if (ret == 0)
{
counter_bdr_reg2.cnt_bdr_th = (uint8_t)(0x00FFU & val);
ret = iis3dwb_write_reg(ctx, IIS3DWB_COUNTER_BDR_REG2,
(uint8_t *)&counter_bdr_reg2, 1);
}
return ret;
}
/**
* @brief Batch data rate counter.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of cnt_bdr_th in reg COUNTER_BDR_REG2
* and COUNTER_BDR_REG1.
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_batch_counter_threshold_get(const stmdev_ctx_t *ctx,
uint16_t *val)
{
iis3dwb_counter_bdr_reg1_t counter_bdr_reg1;
iis3dwb_counter_bdr_reg2_t counter_bdr_reg2;
*val = 0;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_COUNTER_BDR_REG1,
(uint8_t *)&counter_bdr_reg1, 1);
if (ret != 0) { return ret; }
ret = iis3dwb_read_reg(ctx, IIS3DWB_COUNTER_BDR_REG2,
(uint8_t *)&counter_bdr_reg2, 1);
if (ret != 0) { return ret; }
*val = counter_bdr_reg1.cnt_bdr_th;
*val = *val << 8;
*val += counter_bdr_reg2.cnt_bdr_th;
return ret;
}
/**
* @brief Number of unread sensor data (TAG + 6 bytes) stored in FIFO.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Change the values of diff_fifo in reg FIFO_STATUS1
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_data_level_get(const stmdev_ctx_t *ctx, uint16_t *val)
{
iis3dwb_fifo_status1_t fifo_status1;
iis3dwb_fifo_status2_t fifo_status2;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_STATUS1,
(uint8_t *)&fifo_status1, 1);
if (ret == 0)
{
ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_STATUS2,
(uint8_t *)&fifo_status2, 1);
*val = fifo_status2.diff_fifo;
*val = *val << 8;
*val += fifo_status1.diff_fifo;
}
return ret;
}
/**
* @brief Smart FIFO status.[get]
*
* @param ctx Read / write interface definitions.(ptr)
* @param val Registers FIFO_STATUS1 and FIFO_STATUS2
* @retval Interface status (MANDATORY: return 0 -> no Error).
*
*/
int32_t iis3dwb_fifo_status_get(const stmdev_ctx_t *ctx,
iis3dwb_fifo_status_t *val)
{
uint8_t buff[2];
iis3dwb_fifo_status2_t status;
int32_t ret = iis3dwb_read_reg(ctx, IIS3DWB_FIFO_STATUS1, (uint8_t *)&buff[0], 2);
bytecpy((uint8_t *)&status, &buff[1]);
val->fifo_bdr = status.counter_bdr_ia;
val->fifo_ovr = status.fifo_ovr_ia | status.fifo_ovr_latched;
val->fifo_full = status.fifo_full_ia;
val->fifo_th = status.fifo_wtm_ia;
val->fifo_level = (uint16_t)buff[1] & 0x03U;
val->fifo_level = (val->fifo_level * 256U) + buff[0];
return ret;
}
/**
* @}
*
*/
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
iis3dwb_reg.h文件
/**
******************************************************************************
* @file iis3dwb_reg.h
* @author Sensors Software Solution Team
* @brief This file contains all the functions prototypes for the
* iis3dwb_reg.c driver.
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef IIS3DWB_REGS_H
#define IIS3DWB_REGS_H
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include <stdint.h>
#include <stddef.h>
#include <math.h>
/** @addtogroup IIS3DWB
* @{
*
*/
/** @defgroup Endianness definitions
* @{
*
*/
#ifndef DRV_BYTE_ORDER
#ifndef __BYTE_ORDER__
#define DRV_LITTLE_ENDIAN 1234
#define DRV_BIG_ENDIAN 4321
/** if _BYTE_ORDER is not defined, choose the endianness of your architecture
* by uncommenting the define which fits your platform endianness
*/
//#define DRV_BYTE_ORDER DRV_BIG_ENDIAN
#define DRV_BYTE_ORDER DRV_LITTLE_ENDIAN
#else /* defined __BYTE_ORDER__ */
#define DRV_LITTLE_ENDIAN __ORDER_LITTLE_ENDIAN__
#define DRV_BIG_ENDIAN __ORDER_BIG_ENDIAN__
#define DRV_BYTE_ORDER __BYTE_ORDER__
#endif /* __BYTE_ORDER__*/
#endif /* DRV_BYTE_ORDER */
/**
* @}
*
*/
/** @defgroup STMicroelectronics sensors common types
* @{
*
*/
#ifndef MEMS_SHARED_TYPES
#define MEMS_SHARED_TYPES
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t bit0 : 1;
uint8_t bit1 : 1;
uint8_t bit2 : 1;
uint8_t bit3 : 1;
uint8_t bit4 : 1;
uint8_t bit5 : 1;
uint8_t bit6 : 1;
uint8_t bit7 : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t bit7 : 1;
uint8_t bit6 : 1;
uint8_t bit5 : 1;
uint8_t bit4 : 1;
uint8_t bit3 : 1;
uint8_t bit2 : 1;
uint8_t bit1 : 1;
uint8_t bit0 : 1;
#endif /* DRV_BYTE_ORDER */
} bitwise_t;
#define PROPERTY_DISABLE (0U)
#define PROPERTY_ENABLE (1U)
/** @addtogroup Interfaces_Functions
* @brief This section provide a set of functions used to read and
* write a generic register of the device.
* MANDATORY: return 0 -> no Error.
* @{
*
*/
typedef int32_t (*stmdev_write_ptr)(void *, uint8_t, const uint8_t *, uint16_t);
typedef int32_t (*stmdev_read_ptr)(void *, uint8_t, uint8_t *, uint16_t);
typedef void (*stmdev_mdelay_ptr)(uint32_t millisec);
typedef struct
{
/** Component mandatory fields **/
stmdev_write_ptr write_reg;
stmdev_read_ptr read_reg;
/** Component optional fields **/
stmdev_mdelay_ptr mdelay;
/** Customizable optional pointer **/
void *handle;
} stmdev_ctx_t;
/**
* @}
*
*/
#endif /* MEMS_SHARED_TYPES */
#ifndef MEMS_UCF_SHARED_TYPES
#define MEMS_UCF_SHARED_TYPES
/** @defgroup Generic address-data structure definition
* @brief This structure is useful to load a predefined configuration
* of a sensor.
* You can create a sensor configuration by your own or using
* Unico / Unicleo tools available on STMicroelectronics
* web site.
*
* @{
*
*/
typedef struct
{
uint8_t address;
uint8_t data;
} ucf_line_t;
/**
* @}
*
*/
#endif /* MEMS_UCF_SHARED_TYPES */
/**
* @}
*
*/
/** @defgroup IIS3DWB Infos
* @{
*
*/
/** I2C Device Address 8 bit format if SA0=0 -> D5 if SA0=1 -> D7 **/
#define IIS3DWB_I2C_ADD_L 0xD5U
#define IIS3DWB_I2C_ADD_H 0xD7U
/** Device Identification (Who am I) **/
#define IIS3DWB_ID 0x7BU
/**
* @}
*
*/
#define IIS3DWB_PIN_CTRL 0x02U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t not_used_01 : 6;
uint8_t sdo_pu_en : 1;
uint8_t not_used_02 : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t not_used_02 : 1;
uint8_t sdo_pu_en : 1;
uint8_t not_used_01 : 6;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_pin_ctrl_t;
#define IIS3DWB_FIFO_CTRL1 0x07U
typedef struct
{
uint8_t wtm : 8;
} iis3dwb_fifo_ctrl1_t;
#define IIS3DWB_FIFO_CTRL2 0x08U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t wtm : 1;
uint8_t not_used_01 : 6;
uint8_t stop_on_wtm : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t stop_on_wtm : 1;
uint8_t not_used_01 : 6;
uint8_t wtm : 1;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_fifo_ctrl2_t;
#define IIS3DWB_FIFO_CTRL3 0x09U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t bdr_xl : 4;
uint8_t not_used_01 : 4;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t not_used_01 : 4;
uint8_t bdr_xl : 4;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_fifo_ctrl3_t;
#define IIS3DWB_FIFO_CTRL4 0x0AU
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t fifo_mode : 3;
uint8_t not_used_01 : 1;
uint8_t odr_t_batch : 2;
uint8_t odr_ts_batch : 2;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t odr_ts_batch : 2;
uint8_t odr_t_batch : 2;
uint8_t not_used_01 : 1;
uint8_t fifo_mode : 3;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_fifo_ctrl4_t;
#define IIS3DWB_COUNTER_BDR_REG1 0x0BU
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t cnt_bdr_th : 3;
uint8_t not_used_01 : 3;
uint8_t rst_counter_bdr : 1;
uint8_t dataready_pulsed : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t dataready_pulsed : 1;
uint8_t rst_counter_bdr : 1;
uint8_t not_used_01 : 3;
uint8_t cnt_bdr_th : 3;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_counter_bdr_reg1_t;
#define IIS3DWB_COUNTER_BDR_REG2 0x0CU
typedef struct
{
uint8_t cnt_bdr_th : 8;
} iis3dwb_counter_bdr_reg2_t;
#define IIS3DWB_INT1_CTRL 0x0DU
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t int1_drdy_xl : 1;
uint8_t not_used_01 : 1;
uint8_t int1_boot : 1;
uint8_t int1_fifo_th : 1;
uint8_t int1_fifo_ovr : 1;
uint8_t int1_fifo_full : 1;
uint8_t int1_cnt_bdr : 1;
uint8_t not_used_02 : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t not_used_02 : 1;
uint8_t int1_cnt_bdr : 1;
uint8_t int1_fifo_full : 1;
uint8_t int1_fifo_ovr : 1;
uint8_t int1_fifo_th : 1;
uint8_t int1_boot : 1;
uint8_t not_used_01 : 1;
uint8_t int1_drdy_xl : 1;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_int1_ctrl_t;
#define IIS3DWB_INT2_CTRL 0x0EU
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t int2_drdy_xl : 1;
uint8_t not_used_01 : 1;
uint8_t int2_drdy_temp : 1;
uint8_t int2_fifo_th : 1;
uint8_t int2_fifo_ovr : 1;
uint8_t int2_fifo_full : 1;
uint8_t int2_cnt_bdr : 1;
uint8_t not_used_02 : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t not_used_02 : 1;
uint8_t int2_cnt_bdr : 1;
uint8_t int2_fifo_full : 1;
uint8_t int2_fifo_ovr : 1;
uint8_t int2_fifo_th : 1;
uint8_t int2_drdy_temp : 1;
uint8_t not_used_01 : 1;
uint8_t int2_drdy_xl : 1;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_int2_ctrl_t;
#define IIS3DWB_WHO_AM_I 0x0FU
#define IIS3DWB_CTRL1_XL 0x10U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t not_used_01 : 1;
uint8_t lpf2_xl_en : 1;
uint8_t fs_xl : 2;
uint8_t not_used_02 : 1;
uint8_t xl_en : 3;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t xl_en : 3;
uint8_t not_used_02 : 1;
uint8_t fs_xl : 2;
uint8_t lpf2_xl_en : 1;
uint8_t not_used_01 : 1;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_ctrl1_xl_t;
#define IIS3DWB_CTRL3_C 0x12U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t sw_reset : 1;
uint8_t not_used_01 : 1;
uint8_t if_inc : 1;
uint8_t sim : 1;
uint8_t pp_od : 1;
uint8_t h_lactive : 1;
uint8_t bdu : 1;
uint8_t boot : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t boot : 1;
uint8_t bdu : 1;
uint8_t h_lactive : 1;
uint8_t pp_od : 1;
uint8_t sim : 1;
uint8_t if_inc : 1;
uint8_t not_used_01 : 1;
uint8_t sw_reset : 1;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_ctrl3_c_t;
#define IIS3DWB_CTRL4_C 0x13U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t _1ax_to_3regout : 1;
uint8_t lpf1_sel_g : 1;
uint8_t i2c_disable : 1;
uint8_t drdy_mask : 1;
uint8_t not_used_02 : 1;
uint8_t int2_on_int1 : 1;
uint8_t not_used_03 : 2;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t not_used_03 : 2;
uint8_t int2_on_int1 : 1;
uint8_t not_used_02 : 1;
uint8_t drdy_mask : 1;
uint8_t i2c_disable : 1;
uint8_t lpf1_sel_g : 1;
uint8_t _1ax_to_3regout : 1;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_ctrl4_c_t;
#define IIS3DWB_CTRL5_C 0x14U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t st_xl : 2;
uint8_t not_used_01 : 3;
uint8_t rounding : 2;
uint8_t not_used_02 : 1;
uint8_t i2c_disable : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t i2c_disable : 1;
uint8_t not_used_02 : 1;
uint8_t rounding : 2;
uint8_t not_used_01 : 3;
uint8_t st_xl : 2;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_ctrl5_c_t;
#define IIS3DWB_CTRL6_C 0x15U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t xl_axis_sel : 2;
uint8_t not_used_01 : 1;
uint8_t usr_off_w : 1;
uint8_t not_used_02 : 4;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t not_used_02 : 4;
uint8_t usr_off_w : 1;
uint8_t not_used_01 : 1;
uint8_t xl_axis_sel : 2;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_ctrl6_c_t;
#define IIS3DWB_CTRL7_C 0x16U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t not_used_01 : 1;
uint8_t usr_off_on_out : 1;
uint8_t not_used_02 : 6;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t not_used_02 : 6;
uint8_t usr_off_on_out : 1;
uint8_t not_used_01 : 1;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_ctrl7_c_t;
#define IIS3DWB_CTRL8_XL 0x17U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t not_used_01 : 2;
uint8_t fds : 1;
uint8_t fastsettl_mode_xl : 1;
uint8_t hp_ref_mode_xl : 1;
uint8_t hpcf_xl : 3;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t hpcf_xl : 3;
uint8_t hp_ref_mode_xl : 1;
uint8_t fastsettl_mode_xl : 1;
uint8_t fds : 1;
uint8_t not_used_01 : 2;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_ctrl8_xl_t;
#define IIS3DWB_CTRL10_C 0x19U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t not_used_01 : 5;
uint8_t timestamp_en : 1;
uint8_t not_used_02 : 2;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t not_used_02 : 2;
uint8_t timestamp_en : 1;
uint8_t not_used_01 : 5;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_ctrl10_c_t;
#define IIS3DWB_ALL_INT_SRC 0x1AU
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t not_used_01 : 1;
uint8_t wu_ia : 1;
uint8_t not_used_02 : 3;
uint8_t sleep_change : 1;
uint8_t not_used_03 : 1;
uint8_t timestamp_endcount : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t timestamp_endcount : 1;
uint8_t not_used_03 : 1;
uint8_t sleep_change : 1;
uint8_t not_used_02 : 3;
uint8_t wu_ia : 1;
uint8_t not_used_01 : 1;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_all_int_src_t;
#define IIS3DWB_WAKE_UP_SRC 0x1BU
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t z_wu : 1;
uint8_t y_wu : 1;
uint8_t x_wu : 1;
uint8_t wu_ia : 1;
uint8_t sleep_state_ia : 1;
uint8_t not_used_01 : 1;
uint8_t sleep_change_ia : 1;
uint8_t not_used_02 : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t not_used_02 : 1;
uint8_t sleep_change_ia : 1;
uint8_t not_used_01 : 1;
uint8_t sleep_state_ia : 1;
uint8_t wu_ia : 1;
uint8_t x_wu : 1;
uint8_t y_wu : 1;
uint8_t z_wu : 1;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_wake_up_src_t;
#define IIS3DWB_STATUS_REG 0x1EU
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t xlda : 1;
uint8_t not_used_01 : 1;
uint8_t tda : 1;
uint8_t not_used_02 : 5;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t not_used_02 : 5;
uint8_t tda : 1;
uint8_t not_used_01 : 1;
uint8_t xlda : 1;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_status_reg_t;
#define IIS3DWB_OUT_TEMP_L 0x20U
#define IIS3DWB_OUT_TEMP_H 0x21U
#define IIS3DWB_OUTX_L_A 0x28U
#define IIS3DWB_OUTX_H_A 0x29U
#define IIS3DWB_OUTY_L_A 0x2AU
#define IIS3DWB_OUTY_H_A 0x2BU
#define IIS3DWB_OUTZ_L_A 0x2CU
#define IIS3DWB_OUTZ_H_A 0x2DU
#define IIS3DWB_FIFO_STATUS1 0x3AU
typedef struct
{
uint8_t diff_fifo : 8;
} iis3dwb_fifo_status1_t;
#define IIS3DWB_FIFO_STATUS2 0x3BU
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t diff_fifo : 2;
uint8_t not_used_01 : 1;
uint8_t fifo_ovr_latched : 1;
uint8_t counter_bdr_ia : 1;
uint8_t fifo_full_ia : 1;
uint8_t fifo_ovr_ia : 1;
uint8_t fifo_wtm_ia : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t fifo_wtm_ia : 1;
uint8_t fifo_ovr_ia : 1;
uint8_t fifo_full_ia : 1;
uint8_t counter_bdr_ia : 1;
uint8_t fifo_ovr_latched : 1;
uint8_t not_used_01 : 1;
uint8_t diff_fifo : 2;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_fifo_status2_t;
#define IIS3DWB_TIMESTAMP0 0x40U
#define IIS3DWB_TIMESTAMP1 0x41U
#define IIS3DWB_TIMESTAMP2 0x42U
#define IIS3DWB_TIMESTAMP3 0x43U
#define IIS3DWB_SLOPE_EN 0x56U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t lir : 1;
uint8_t not_used_01 : 3;
uint8_t slope_fds : 1;
uint8_t sleep_status_on_int : 1;
uint8_t not_used_02 : 2;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t not_used_02 : 2;
uint8_t sleep_status_on_int : 1;
uint8_t slope_fds : 1;
uint8_t not_used_01 : 3;
uint8_t lir : 1;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_slope_en_t;
#define IIS3DWB_INTERRUPTS_EN 0x58U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t not_used_01 : 7;
uint8_t interrupts_enable : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t interrupts_enable : 1;
uint8_t not_used_01 : 7;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_interrupts_en_t;
#define IIS3DWB_WAKE_UP_THS 0x5BU
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t wk_ths : 6;
uint8_t usr_off_on_wu : 1;
uint8_t not_used_01 : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t not_used_01 : 1;
uint8_t usr_off_on_wu : 1;
uint8_t wk_ths : 6;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_wake_up_ths_t;
#define IIS3DWB_WAKE_UP_DUR 0x5CU
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t sleep_dur : 4;
uint8_t wake_ths_w : 1;
uint8_t wake_dur : 2;
uint8_t not_used_01 : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t not_used_01 : 1;
uint8_t wake_dur : 2;
uint8_t wake_ths_w : 1;
uint8_t sleep_dur : 4;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_wake_up_dur_t;
#define IIS3DWB_MD1_CFG 0x5EU
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t not_used_01 : 5;
uint8_t int1_wu : 1;
uint8_t not_used_02 : 1;
uint8_t int1_sleep_change : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t int1_sleep_change : 1;
uint8_t not_used_02 : 1;
uint8_t int1_wu : 1;
uint8_t not_used_01 : 5;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_md1_cfg_t;
#define IIS3DWB_MD2_CFG 0x5FU
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t int2_timestamp : 1;
uint8_t not_used_01 : 4;
uint8_t int2_wu : 1;
uint8_t not_used_02 : 1;
uint8_t int2_sleep_change : 1;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t int2_sleep_change : 1;
uint8_t not_used_02 : 1;
uint8_t int2_wu : 1;
uint8_t not_used_01 : 4;
uint8_t int2_timestamp : 1;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_md2_cfg_t;
#define IIS3DWB_INTERNAL_FREQ_FINE 0x63U
typedef struct
{
uint8_t freq_fine : 8;
} iis3dwb_internal_freq_fine_t;
#define IIS3DWB_X_OFS_USR 0x73U
#define IIS3DWB_Y_OFS_USR 0x74U
#define IIS3DWB_Z_OFS_USR 0x75U
#define IIS3DWB_FIFO_DATA_OUT_TAG 0x78U
typedef struct
{
#if DRV_BYTE_ORDER == DRV_LITTLE_ENDIAN
uint8_t tag_parity : 1;
uint8_t tag_cnt : 2;
uint8_t tag_sensor : 5;
#elif DRV_BYTE_ORDER == DRV_BIG_ENDIAN
uint8_t tag_sensor : 5;
uint8_t tag_cnt : 2;
uint8_t tag_parity : 1;
#endif /* DRV_BYTE_ORDER */
} iis3dwb_fifo_data_out_tag_t;
#define IIS3DWB_FIFO_DATA_OUT_X_L 0x79U
#define IIS3DWB_FIFO_DATA_OUT_X_H 0x7AU
#define IIS3DWB_FIFO_DATA_OUT_Y_L 0x7BU
#define IIS3DWB_FIFO_DATA_OUT_Y_H 0x7CU
#define IIS3DWB_FIFO_DATA_OUT_Z_L 0x7DU
#define IIS3DWB_FIFO_DATA_OUT_Z_H 0x7EU
/**
* @defgroup IIS3DWB_Register_Union
* @brief This union group all the registers having a bit-field
* description.
* This union is useful but it's not needed by the driver.
*
* REMOVING this union you are compliant with:
* MISRA-C 2012 [Rule 19.2] -> " Union are not allowed "
*
* @{
*
*/
typedef union
{
iis3dwb_pin_ctrl_t pin_ctrl;
iis3dwb_fifo_ctrl1_t fifo_ctrl1;
iis3dwb_fifo_ctrl2_t fifo_ctrl2;
iis3dwb_fifo_ctrl3_t fifo_ctrl3;
iis3dwb_fifo_ctrl4_t fifo_ctrl4;
iis3dwb_counter_bdr_reg1_t counter_bdr_reg1;
iis3dwb_counter_bdr_reg2_t counter_bdr_reg2;
iis3dwb_int1_ctrl_t int1_ctrl;
iis3dwb_int2_ctrl_t int2_ctrl;
iis3dwb_ctrl1_xl_t ctrl1_xl;
iis3dwb_ctrl3_c_t ctrl3_c;
iis3dwb_ctrl4_c_t ctrl4_c;
iis3dwb_ctrl5_c_t ctrl5_c;
iis3dwb_ctrl6_c_t ctrl6_c;
iis3dwb_ctrl7_c_t ctrl7_c;
iis3dwb_ctrl8_xl_t ctrl8_xl;
iis3dwb_ctrl10_c_t ctrl10_c;
iis3dwb_all_int_src_t all_int_src;
iis3dwb_wake_up_src_t wake_up_src;
iis3dwb_status_reg_t status_reg;
iis3dwb_fifo_status1_t fifo_status1;
iis3dwb_fifo_status2_t fifo_status2;
iis3dwb_slope_en_t slope_en;
iis3dwb_interrupts_en_t interrupts_en;
iis3dwb_wake_up_ths_t wake_up_ths;
iis3dwb_wake_up_dur_t wake_up_dur;
iis3dwb_md1_cfg_t md1_cfg;
iis3dwb_md2_cfg_t md2_cfg;
iis3dwb_internal_freq_fine_t internal_freq_fine;
iis3dwb_fifo_data_out_tag_t fifo_data_out_tag;
bitwise_t bitwise;
uint8_t byte;
} iis3dwb_reg_t;
/**
* @}
*
*/
#ifndef __weak
#define __weak __attribute__((weak))
#endif /* __weak */
/*
* These are the basic platform dependent I/O routines to read
* and write device registers connected on a standard bus.
* The driver keeps offering a default implementation based on function
* pointers to read/write routines for backward compatibility.
* The __weak directive allows the final application to overwrite
* them with a custom implementation.
*/
int32_t iis3dwb_read_reg(const stmdev_ctx_t *ctx, uint8_t reg,
uint8_t *data,
uint16_t len);
int32_t iis3dwb_write_reg(const stmdev_ctx_t *ctx, uint8_t reg,
uint8_t *data,
uint16_t len);
float_t iis3dwb_from_fs2g_to_mg(int16_t lsb);
float_t iis3dwb_from_fs4g_to_mg(int16_t lsb);
float_t iis3dwb_from_fs8g_to_mg(int16_t lsb);
float_t iis3dwb_from_fs16g_to_mg(int16_t lsb);
extern float_t iis3dwb_from_lsb_to_celsius(int16_t lsb);
extern float_t iis3dwb_from_lsb_to_nsec(int32_t lsb);
typedef enum
{
IIS3DWB_2g = 0,
IIS3DWB_16g = 1, /* if XL_FS_MODE = '1' -> IIS3DWB_2g */
IIS3DWB_4g = 2,
IIS3DWB_8g = 3,
} iis3dwb_fs_xl_t;
int32_t iis3dwb_xl_full_scale_set(const stmdev_ctx_t *ctx,
iis3dwb_fs_xl_t val);
int32_t iis3dwb_xl_full_scale_get(const stmdev_ctx_t *ctx,
iis3dwb_fs_xl_t *val);
typedef enum
{
IIS3DWB_XL_ODR_OFF = 0,
IIS3DWB_XL_ODR_26k7Hz = 5,
} iis3dwb_odr_xl_t;
int32_t iis3dwb_xl_data_rate_set(const stmdev_ctx_t *ctx,
iis3dwb_odr_xl_t val);
int32_t iis3dwb_xl_data_rate_get(const stmdev_ctx_t *ctx,
iis3dwb_odr_xl_t *val);
int32_t iis3dwb_block_data_update_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_block_data_update_get(const stmdev_ctx_t *ctx,
uint8_t *val);
typedef enum
{
IIS3DWB_LSb_1mg = 0,
IIS3DWB_LSb_16mg = 1,
} iis3dwb_usr_off_w_t;
int32_t iis3dwb_xl_offset_weight_set(const stmdev_ctx_t *ctx,
iis3dwb_usr_off_w_t val);
int32_t iis3dwb_xl_offset_weight_get(const stmdev_ctx_t *ctx,
iis3dwb_usr_off_w_t *val);
typedef enum
{
IIS3DWB_ENABLE_ALL = 0,
IIS3DWB_ONLY_X_ON_ONE_OUT_REG = 0x01,
IIS3DWB_ONLY_Y_ON_ONE_OUT_REG = 0x02,
IIS3DWB_ONLY_Z_ON_ONE_OUT_REG = 0x03,
IIS3DWB_ONLY_X_ON_ALL_OUT_REG = 0x11,
IIS3DWB_ONLY_Y_ON_ALL_OUT_REG = 0x12,
IIS3DWB_ONLY_Z_ON_ALL_OUT_REG = 0x13,
} iis3dwb_xl_axis_sel_t;
int32_t iis3dwb_xl_axis_selection_set(const stmdev_ctx_t *ctx,
iis3dwb_xl_axis_sel_t val);
int32_t iis3dwb_xl_axis_selection_get(const stmdev_ctx_t *ctx,
iis3dwb_xl_axis_sel_t *val);
typedef struct
{
iis3dwb_all_int_src_t all_int_src;
iis3dwb_wake_up_src_t wake_up_src;
iis3dwb_status_reg_t status_reg;
} iis3dwb_all_sources_t;
int32_t iis3dwb_all_sources_get(const stmdev_ctx_t *ctx,
iis3dwb_all_sources_t *val);
int32_t iis3dwb_status_reg_get(const stmdev_ctx_t *ctx,
iis3dwb_status_reg_t *val);
int32_t iis3dwb_xl_flag_data_ready_get(const stmdev_ctx_t *ctx,
uint8_t *val);
int32_t iis3dwb_temp_flag_data_ready_get(const stmdev_ctx_t *ctx,
uint8_t *val);
int32_t iis3dwb_usr_offset_block_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_usr_offset_block_get(const stmdev_ctx_t *ctx, uint8_t *val);
int32_t iis3dwb_xl_usr_offset_x_set(const stmdev_ctx_t *ctx, uint8_t *buff);
int32_t iis3dwb_xl_usr_offset_x_get(const stmdev_ctx_t *ctx, uint8_t *buff);
int32_t iis3dwb_xl_usr_offset_y_set(const stmdev_ctx_t *ctx, uint8_t *buff);
int32_t iis3dwb_xl_usr_offset_y_get(const stmdev_ctx_t *ctx, uint8_t *buff);
int32_t iis3dwb_xl_usr_offset_z_set(const stmdev_ctx_t *ctx, uint8_t *buff);
int32_t iis3dwb_xl_usr_offset_z_get(const stmdev_ctx_t *ctx, uint8_t *buff);
int32_t iis3dwb_xl_usr_offset_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_xl_usr_offset_get(const stmdev_ctx_t *ctx, uint8_t *val);
int32_t iis3dwb_timestamp_rst(const stmdev_ctx_t *ctx);
int32_t iis3dwb_timestamp_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_timestamp_get(const stmdev_ctx_t *ctx, uint8_t *val);
int32_t iis3dwb_timestamp_raw_get(const stmdev_ctx_t *ctx, uint32_t *val);
typedef enum
{
IIS3DWB_NO_ROUND = 0,
IIS3DWB_ROUND = 1,
} iis3dwb_rounding_t;
int32_t iis3dwb_rounding_mode_set(const stmdev_ctx_t *ctx,
iis3dwb_rounding_t val);
int32_t iis3dwb_rounding_mode_get(const stmdev_ctx_t *ctx,
iis3dwb_rounding_t *val);
int32_t iis3dwb_temperature_raw_get(const stmdev_ctx_t *ctx, int16_t *val);
int32_t iis3dwb_acceleration_raw_get(const stmdev_ctx_t *ctx, int16_t *val);
int32_t iis3dwb_odr_cal_reg_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_odr_cal_reg_get(const stmdev_ctx_t *ctx, uint8_t *val);
typedef enum
{
IIS3DWB_DRDY_LATCHED = 0,
IIS3DWB_DRDY_PULSED = 1,
} iis3dwb_dataready_pulsed_t;
int32_t iis3dwb_data_ready_mode_set(const stmdev_ctx_t *ctx,
iis3dwb_dataready_pulsed_t val);
int32_t iis3dwb_data_ready_mode_get(const stmdev_ctx_t *ctx,
iis3dwb_dataready_pulsed_t *val);
int32_t iis3dwb_device_id_get(const stmdev_ctx_t *ctx, uint8_t *buff);
int32_t iis3dwb_reset_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_reset_get(const stmdev_ctx_t *ctx, uint8_t *val);
int32_t iis3dwb_auto_increment_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_auto_increment_get(const stmdev_ctx_t *ctx, uint8_t *val);
int32_t iis3dwb_boot_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_boot_get(const stmdev_ctx_t *ctx, uint8_t *val);
typedef enum
{
IIS3DWB_XL_ST_DISABLE = 0,
IIS3DWB_XL_ST_POSITIVE = 1,
IIS3DWB_XL_ST_NEGATIVE = 2,
} iis3dwb_st_xl_t;
int32_t iis3dwb_xl_self_test_set(const stmdev_ctx_t *ctx,
iis3dwb_st_xl_t val);
int32_t iis3dwb_xl_self_test_get(const stmdev_ctx_t *ctx,
iis3dwb_st_xl_t *val);
int32_t iis3dwb_filter_settling_mask_set(const stmdev_ctx_t *ctx,
uint8_t val);
int32_t iis3dwb_filter_settling_mask_get(const stmdev_ctx_t *ctx,
uint8_t *val);
typedef enum
{
IIS3DWB_SLOPE_ODR_DIV_4 = 0x10,
IIS3DWB_HP_REF_MODE = 0x37,
IIS3DWB_HP_ODR_DIV_10 = 0x11,
IIS3DWB_HP_ODR_DIV_20 = 0x12,
IIS3DWB_HP_ODR_DIV_45 = 0x13,
IIS3DWB_HP_ODR_DIV_100 = 0x14,
IIS3DWB_HP_ODR_DIV_200 = 0x15,
IIS3DWB_HP_ODR_DIV_400 = 0x16,
IIS3DWB_HP_ODR_DIV_800 = 0x17,
IIS3DWB_LP_6k3Hz = 0x00,
IIS3DWB_LP_ODR_DIV_4 = 0x80,
IIS3DWB_LP_ODR_DIV_10 = 0x81,
IIS3DWB_LP_ODR_DIV_20 = 0x82,
IIS3DWB_LP_ODR_DIV_45 = 0x83,
IIS3DWB_LP_ODR_DIV_100 = 0x84,
IIS3DWB_LP_ODR_DIV_200 = 0x85,
IIS3DWB_LP_ODR_DIV_400 = 0x86,
IIS3DWB_LP_ODR_DIV_800 = 0x87,
} iis3dwb_filt_xl_en_t;
int32_t iis3dwb_xl_filt_path_on_out_set(const stmdev_ctx_t *ctx,
iis3dwb_filt_xl_en_t val);
int32_t iis3dwb_xl_filt_path_on_out_get(const stmdev_ctx_t *ctx,
iis3dwb_filt_xl_en_t *val);
int32_t iis3dwb_xl_fast_settling_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_xl_fast_settling_get(const stmdev_ctx_t *ctx, uint8_t *val);
typedef enum
{
IIS3DWB_USE_SLOPE = 0,
IIS3DWB_USE_HPF = 1,
} iis3dwb_slope_fds_t;
int32_t iis3dwb_xl_hp_path_internal_set(const stmdev_ctx_t *ctx,
iis3dwb_slope_fds_t val);
int32_t iis3dwb_xl_hp_path_internal_get(const stmdev_ctx_t *ctx,
iis3dwb_slope_fds_t *val);
typedef enum
{
IIS3DWB_PULL_UP_DISC = 0,
IIS3DWB_PULL_UP_CONNECT = 1,
} iis3dwb_sdo_pu_en_t;
int32_t iis3dwb_sdo_sa0_mode_set(const stmdev_ctx_t *ctx,
iis3dwb_sdo_pu_en_t val);
int32_t iis3dwb_sdo_sa0_mode_get(const stmdev_ctx_t *ctx,
iis3dwb_sdo_pu_en_t *val);
typedef enum
{
IIS3DWB_SPI_4_WIRE = 0,
IIS3DWB_SPI_3_WIRE = 1,
} iis3dwb_sim_t;
int32_t iis3dwb_spi_mode_set(const stmdev_ctx_t *ctx, iis3dwb_sim_t val);
int32_t iis3dwb_spi_mode_get(const stmdev_ctx_t *ctx, iis3dwb_sim_t *val);
typedef enum
{
IIS3DWB_I2C_ENABLE = 0,
IIS3DWB_I2C_DISABLE = 1,
} iis3dwb_i2c_disable_t;
int32_t iis3dwb_i2c_interface_set(const stmdev_ctx_t *ctx,
iis3dwb_i2c_disable_t val);
int32_t iis3dwb_i2c_interface_get(const stmdev_ctx_t *ctx,
iis3dwb_i2c_disable_t *val);
typedef struct
{
uint8_t drdy_xl : 1; /* Accelerometer data ready */
uint8_t boot : 1; /* Restoring calibration parameters */
uint8_t fifo_th : 1; /* FIFO threshold reached */
uint8_t fifo_ovr : 1; /* FIFO overrun */
uint8_t fifo_full : 1; /* FIFO full */
uint8_t fifo_bdr : 1; /* FIFO Batch counter threshold reached */
uint8_t wake_up : 1; /* wake up event */
uint8_t sleep_change :
1; /* Act/Inact (or Vice-versa) status changed */
uint8_t sleep_status : 1; /* Act/Inact status */
} iis3dwb_pin_int1_route_t;
int32_t iis3dwb_pin_int1_route_set(const stmdev_ctx_t *ctx,
iis3dwb_pin_int1_route_t *val);
int32_t iis3dwb_pin_int1_route_get(const stmdev_ctx_t *ctx,
iis3dwb_pin_int1_route_t *val);
typedef struct
{
uint8_t drdy_xl : 1; /* Accelerometer data ready */
uint8_t drdy_temp : 1; /* Temperature data ready */
uint8_t fifo_th : 1; /* FIFO threshold reached */
uint8_t fifo_ovr : 1; /* FIFO overrun */
uint8_t fifo_full : 1; /* FIFO full */
uint8_t fifo_bdr : 1; /* FIFO Batch counter threshold reached */
uint8_t timestamp : 1; /* timestamp overflow */
uint8_t wake_up : 1; /* wake up event */
uint8_t sleep_change : 1; /* Act/Inact (or Vice-versa) status changed */
uint8_t sleep_status : 1; /* Act/Inact status */
} iis3dwb_pin_int2_route_t;
int32_t iis3dwb_pin_int2_route_set(const stmdev_ctx_t *ctx,
iis3dwb_pin_int2_route_t *val);
int32_t iis3dwb_pin_int2_route_get(const stmdev_ctx_t *ctx,
iis3dwb_pin_int2_route_t *val);
typedef enum
{
IIS3DWB_PUSH_PULL = 0,
IIS3DWB_OPEN_DRAIN = 1,
} iis3dwb_pp_od_t;
int32_t iis3dwb_pin_mode_set(const stmdev_ctx_t *ctx, iis3dwb_pp_od_t val);
int32_t iis3dwb_pin_mode_get(const stmdev_ctx_t *ctx, iis3dwb_pp_od_t *val);
typedef enum
{
IIS3DWB_ACTIVE_HIGH = 0,
IIS3DWB_ACTIVE_LOW = 1,
} iis3dwb_h_lactive_t;
int32_t iis3dwb_pin_polarity_set(const stmdev_ctx_t *ctx,
iis3dwb_h_lactive_t val);
int32_t iis3dwb_pin_polarity_get(const stmdev_ctx_t *ctx,
iis3dwb_h_lactive_t *val);
int32_t iis3dwb_all_on_int1_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_all_on_int1_get(const stmdev_ctx_t *ctx, uint8_t *val);
typedef enum
{
IIS3DWB_INT_PULSED = 0,
IIS3DWB_INT_LATCHED = 1,
} iis3dwb_lir_t;
int32_t iis3dwb_int_notification_set(const stmdev_ctx_t *ctx,
iis3dwb_lir_t val);
int32_t iis3dwb_int_notification_get(const stmdev_ctx_t *ctx,
iis3dwb_lir_t *val);
typedef enum
{
IIS3DWB_LSb_FS_DIV_64 = 0,
IIS3DWB_LSb_FS_DIV_256 = 1,
} iis3dwb_wake_ths_w_t;
int32_t iis3dwb_wkup_ths_weight_set(const stmdev_ctx_t *ctx,
iis3dwb_wake_ths_w_t val);
int32_t iis3dwb_wkup_ths_weight_get(const stmdev_ctx_t *ctx,
iis3dwb_wake_ths_w_t *val);
int32_t iis3dwb_wkup_threshold_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_wkup_threshold_get(const stmdev_ctx_t *ctx, uint8_t *val);
int32_t iis3dwb_xl_usr_offset_on_wkup_set(const stmdev_ctx_t *ctx,
uint8_t val);
int32_t iis3dwb_xl_usr_offset_on_wkup_get(const stmdev_ctx_t *ctx,
uint8_t *val);
int32_t iis3dwb_wkup_dur_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_wkup_dur_get(const stmdev_ctx_t *ctx, uint8_t *val);
int32_t iis3dwb_act_sleep_dur_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_act_sleep_dur_get(const stmdev_ctx_t *ctx, uint8_t *val);
int32_t iis3dwb_fifo_watermark_set(const stmdev_ctx_t *ctx, uint16_t val);
int32_t iis3dwb_fifo_watermark_get(const stmdev_ctx_t *ctx, uint16_t *val);
int32_t iis3dwb_fifo_stop_on_wtm_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_fifo_stop_on_wtm_get(const stmdev_ctx_t *ctx, uint8_t *val);
typedef enum
{
IIS3DWB_XL_NOT_BATCHED = 0,
IIS3DWB_XL_BATCHED_AT_26k7Hz = 10,
} iis3dwb_bdr_xl_t;
int32_t iis3dwb_fifo_xl_batch_set(const stmdev_ctx_t *ctx,
iis3dwb_bdr_xl_t val);
int32_t iis3dwb_fifo_xl_batch_get(const stmdev_ctx_t *ctx,
iis3dwb_bdr_xl_t *val);
typedef enum
{
IIS3DWB_BYPASS_MODE = 0,
IIS3DWB_FIFO_MODE = 1,
IIS3DWB_STREAM_TO_FIFO_MODE = 3,
IIS3DWB_BYPASS_TO_STREAM_MODE = 4,
IIS3DWB_STREAM_MODE = 6,
IIS3DWB_BYPASS_TO_FIFO_MODE = 7,
} iis3dwb_fifo_mode_t;
int32_t iis3dwb_fifo_mode_set(const stmdev_ctx_t *ctx,
iis3dwb_fifo_mode_t val);
int32_t iis3dwb_fifo_mode_get(const stmdev_ctx_t *ctx,
iis3dwb_fifo_mode_t *val);
typedef enum
{
IIS3DWB_TEMP_NOT_BATCHED = 0,
IIS3DWB_TEMP_BATCHED_AT_104Hz = 3,
} iis3dwb_odr_t_batch_t;
int32_t iis3dwb_fifo_temp_batch_set(const stmdev_ctx_t *ctx,
iis3dwb_odr_t_batch_t val);
int32_t iis3dwb_fifo_temp_batch_get(const stmdev_ctx_t *ctx,
iis3dwb_odr_t_batch_t *val);
typedef enum
{
IIS3DWB_NO_DECIMATION = 0,
IIS3DWB_DEC_1 = 1,
IIS3DWB_DEC_8 = 2,
IIS3DWB_DEC_32 = 3,
} iis3dwb_fifo_timestamp_batch_t;
int32_t iis3dwb_fifo_timestamp_batch_set(const stmdev_ctx_t *ctx,
iis3dwb_fifo_timestamp_batch_t val);
int32_t iis3dwb_fifo_timestamp_batch_get(const stmdev_ctx_t *ctx,
iis3dwb_fifo_timestamp_batch_t *val);
int32_t iis3dwb_rst_batch_counter_set(const stmdev_ctx_t *ctx, uint8_t val);
int32_t iis3dwb_rst_batch_counter_get(const stmdev_ctx_t *ctx,
uint8_t *val);
int32_t iis3dwb_batch_counter_threshold_set(const stmdev_ctx_t *ctx,
uint16_t val);
int32_t iis3dwb_batch_counter_threshold_get(const stmdev_ctx_t *ctx,
uint16_t *val);
int32_t iis3dwb_fifo_data_level_get(const stmdev_ctx_t *ctx, uint16_t *val);
typedef struct
{
uint16_t fifo_level : 10;
uint8_t fifo_bdr : 1;
uint8_t fifo_full : 1;
uint8_t fifo_ovr : 1;
uint8_t fifo_th : 1;
} iis3dwb_fifo_status_t;
int32_t iis3dwb_fifo_status_get(const stmdev_ctx_t *ctx,
iis3dwb_fifo_status_t *val);
typedef struct
{
uint8_t tag;
uint8_t data[6];
} iis3dwb_fifo_out_raw_t;
int32_t iis3dwb_fifo_out_raw_get(const stmdev_ctx_t *ctx, iis3dwb_fifo_out_raw_t *val);
int32_t iis3dwb_fifo_out_multi_raw_get(const stmdev_ctx_t *ctx,
iis3dwb_fifo_out_raw_t *fdata,
uint16_t num);
typedef enum
{
IIS3DWB_XL_TAG = 2,
IIS3DWB_TEMPERATURE_TAG,
IIS3DWB_TIMESTAMP_TAG,
} iis3dwb_fifo_tag_t;
int32_t iis3dwb_fifo_sensor_tag_get(const stmdev_ctx_t *ctx,
iis3dwb_fifo_tag_t *val);
/**
*@}
*
*/
#ifdef __cplusplus
}
#endif
#endif /* IIS3DWB_REGS_H */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
**iis3dwb_reg.c 和iis3dwb_reg.h是比较重要的文件,在资料包里。
使用说明:
-
在CubeMX中配置:
- SPI1全双工主模式,PB3(SCK), PB4(MISO), PB5(MOSI)
- PB0作为GPIO输出(NSS)
- 启用USB Device CDC模式
- 配置系统时钟(建议72MHz)
-
添加必要的HAL库和中间件(USB Device)
-
将iis3dwb_reg.c和iis3dwb_reg.h添加到工程
-
在USB CDC回调函数中处理传输完成事件
注意事项:
- 根据实际SPI速度调整BaudRatePrescaler
- 确保USB CDC缓冲区足够大(默认64字节)
- 如果通信不稳定,检查SPI相位/极性与传感器要求的匹配
- 可以通过降低数据率(如改为26.7kHZ)来减少USB传输压力

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 15
15 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)