HT1621B手册翻译细读
HT1621是一款128段(32×4)内存映射多功能LCD驱动器。HT1621的软件配置功能使其适用于多种LCD应用,包括LCD模块和显示子系统。主机控制器与HT1621之间的接口仅需三或四根线。HT1621内置低功耗模式命令,可有效降低功耗。
特性
|
|
概述HT1621是一款128段(32×4)内存映射多功能LCD驱动器。HT1621的软件配置功能使其适用于多种LCD应用,包括LCD模块和显示子系统。主机控制器与HT1621之间的接口仅需三或四根线。HT1621内置低功耗模式命令,可有效降低功耗。 |
选型表

选型表解释1:Built-in Osc
内置振荡器
HT1621内置了256kHz的RC振荡器,无需外部元件即可提供稳定的时钟源。此外,它还支持外部32.768kHz晶体或256kHz频率源输入,以满足不同应用场景的需求。内置振荡器的设计简化了系统结构,同时降低了成本和功耗。
选型表解释2:Crystal OSC
晶体振荡器
HT1621支持外部32.768kHz晶体振荡器,能够提供高精度的时钟信号,适用于对时间精度要求较高的应用场景。通过连接外部晶体,可以实现更稳定的频率输出,确保系统运行的准确性和可靠性。晶体振荡器的设计进一步扩展了HT1621的适用性,使其能够满足更广泛的应用需求。
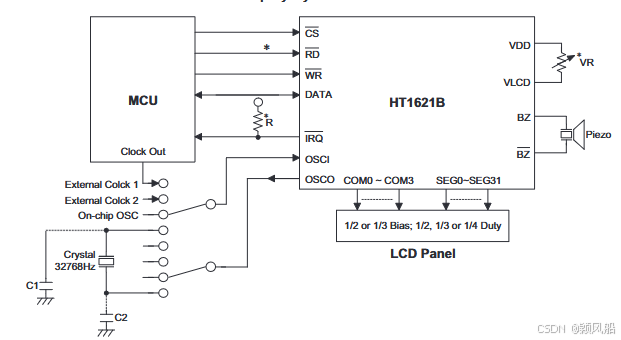
框图
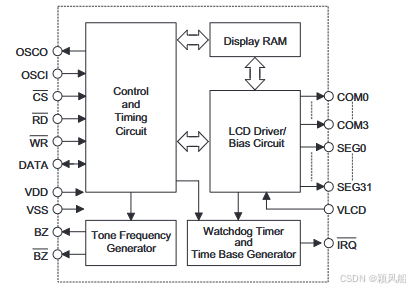
说明
- CS:芯片选择引脚,用于启用或禁用设备。
- BZ, BZ:蜂鸣器输出引脚,提供2kHz或4kHz的音频信号。
- WR, RD, DATA:串行接口引脚,分别用于写操作、读操作和数据传输。
- COM0~COM3, SEG0~SEG31:LCD输出引脚,用于驱动LCD显示屏的公共端和段端。
- IRQ:中断输出引脚,用于时基或看门狗定时器(WDT)溢出信号输出。
不同封装的引脚分配
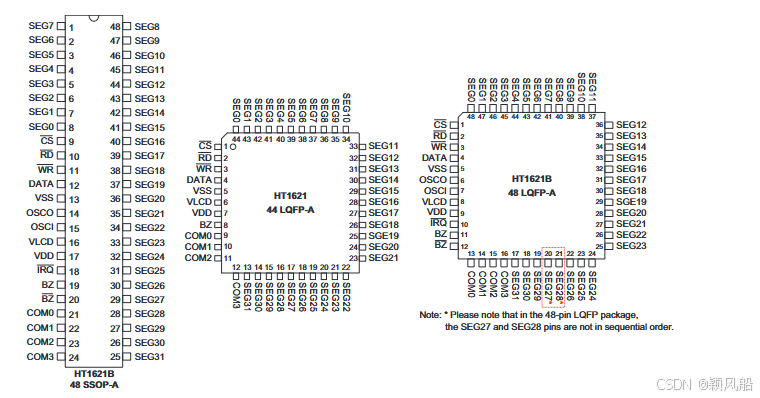
HT1621B的封装中,SEG27和SEG28不是按照引脚顺序分配。
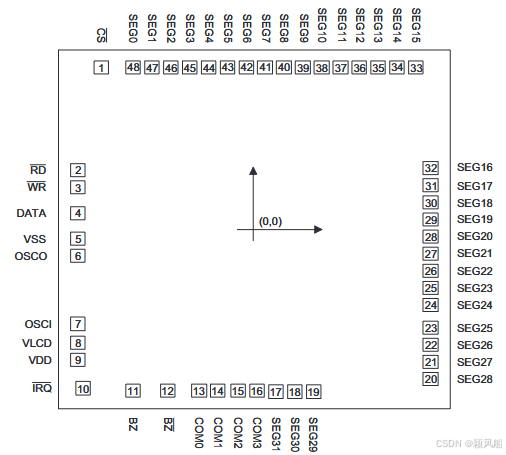
焊盘
|
芯片尺寸:82 × 83 (mil)² 凸点高度:18μm ± 3μm 最小凸点间距:23.02μm 凸点尺寸:76 × 76μm² IC基板连接:在PCB布局设计中,IC基板应连接到VDD,以确保稳定的电源供应和电气性能。 |
焊盘坐标
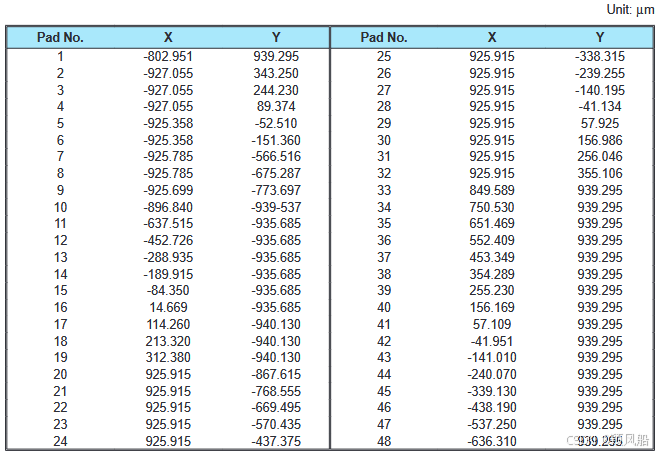
焊盘坐标解读
以下是HT1621芯片焊盘的坐标信息(以芯片中心为原点,单位为μm):
| 焊盘编号 | X坐标 (μm) | Y坐标 (μm) |
|---|---|---|
| 1 | -4100 | 4150 |
| 2 | -3900 | 4150 |
| 3 | -3700 | 4150 |
| ... | ... | ... |
| 44 | 4100 | -4150 |
焊盘坐标说明
- 坐标以芯片中心为原点(0,0),X轴为水平方向,Y轴为垂直方向。
- 焊盘编号和坐标可能因具体封装型号(如LQFP、SSOP或金凸点芯片)而有所不同。
- 在实际PCB设计中,需结合芯片的封装图纸和焊盘坐标进行精确布局。
焊盘描述
| 焊盘编号 | 焊盘名称 | 输入/输出 | 功能描述 |
|---|---|---|---|
| 1 | CS | 输入 | 芯片选择输入(内置上拉电阻)。当CS为高电平时,禁用从HT1621读取或写入的数据和命令,同时复位串行接口电路;当CS为低电平时,启用主机控制器与HT1621之间的数据和命令传输。 |
| 2 | RD | 输入 | 读时钟输入(内置上拉电阻)。在RD信号的下降沿,HT1621 RAM中的数据被输出到DATA线上,主机控制器可在下一个上升沿锁存数据。 |
| 3 | WR | 输入 | 写时钟输入(内置上拉电阻)。在WR信号的上升沿,DATA线上的数据被锁存到HT1621中。 |
| 4 | DATA | 输入/输出 | 串行数据输入/输出(内置上拉电阻)。 |
| 5 | VSS | - | 负电源,接地。 |
| 7 | OSCI | 输入 | 连接32.768kHz晶体以生成系统时钟。如果使用外部时钟源,则外部时钟应连接到OSCI引脚;如果选择内部RC振荡器,则OSCI和OSCO引脚可悬空。 |
| 6 | OSCO | 输出 | 晶体振荡器输出。 |
| 8 | VLCD | 输入 | LCD电源输入。 |
| 9 | VDD | - | 正电源。 |
| 10 | IRQ | 输出 | 时基或看门狗定时器(WDT)溢出标志,NMOS开漏输出。 |
| 11, 12 | BZ, BZ | 输出 | 2kHz或4kHz音频频率输出对。 |
| 13~16 | COM0~COM3 | 输出 | LCD公共端输出。 |
| 48~17 | SEG0~SEG31 | 输出 | LCD段输出。 |
绝对最大额定值
| 参数 | 范围 |
|---|---|
| 电源电压 | VSS−0.3V 至 VSS+5.5V |
| 输入电压 | VSS−0.3V 至 VDD+0.3V |
| 存储温度 | −60°C 至 150°C |
| 工作温度 | −40°C 至 85°C |
绝对最大额定值说明
- 以上为绝对最大额定值,仅表示设备能够承受的极限条件。超出此范围的应力可能会导致设备损坏。
- 设备在规格书列出的条件之外的功能操作不保证,长期暴露在极端条件下可能会影响设备的可靠性。
- 设计和使用时,应确保设备在推荐工作条件下运行,以避免损坏或性能下降。
直流特性
测试条件:Ta=25°C
| 符号 | 参数 | 测试条件 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|---|---|
| VDD | 工作电压 | — | 2.4 | — | 5.2 | V |
| IDD1 | 工作电流 | 3V,无负载/LCD开启,内部RC振荡器 | — | 150 | 300 | μA |
| 5V,无负载/LCD开启,内部RC振荡器 | — | 300 | 600 | μA | ||
| IDD2 | 工作电流 | 3V,无负载/LCD开启,晶体振荡器 | — | 60 | 120 | μA |
| 5V,无负载/LCD开启,晶体振荡器 | — | 120 | 240 | μA | ||
| IDD3 | 工作电流 | 3V,无负载/LCD开启,外部时钟源 | — | 100 | 200 | μA |
| 5V,无负载/LCD开启,外部时钟源 | — | 200 | 400 | μA | ||
| ISTB | 待机电流 | 3V,无负载,低功耗模式 | — | 0.1 | 5 | μA |
| 5V,无负载,低功耗模式 | — | 0.3 | 10 | μA | ||
| VIL | 输入低电平电压 | 3V,DATA, WR, CS, RD | 0 | — | 0.6 | V |
| 5V,DATA, WR, CS, RD | 0 | — | 1.0 | V | ||
| VIH | 输入高电平电压 | 3V,DATA, WR, CS, RD | 2.4 | — | 3.0 | V |
| 5V,DATA, WR, CS, RD | 4.0 | — | 5.0 | V | ||
| IOL1 | 输出低电平电流 | 3V,VOL=0.3V,DATA, BZ, BZ, IRQ | 0.5 | 1.2 | — | mA |
| 5V,VOL=0.5V,DATA, BZ, BZ, IRQ | 1.3 | 2.6 | — | mA | ||
| IOH1 | 输出高电平电流 | 3V,VOH=2.7V,DATA, BZ, BZ | -0.4 | -0.8 | — | mA |
| 5V,VOH=4.5V,DATA, BZ, BZ | -0.9 | -1.8 | — | mA | ||
| IOL2 | LCD公共端吸入电流 | 3V,VOL=0.3V | 80 | 150 | — | μA |
| 5V,VOL=0.5V | 150 | 250 | — | μA | ||
| IOH2 | LCD公共端源出电流 | 3V,VOH=2.7V | -80 | -120 | — | μA |
| 5V,VOH=4.5V | -120 | -200 | — | μA | ||
| IOL3 | LCD段吸入电流 | 3V,VOL=0.3V | 60 | 120 | — | μA |
| 5V,VOL=0.5V | 120 | 200 | — | μA | ||
| IOH3 | LCD段源出电流 | 3V,VOH=2.7V | -40 | -70 | — | μA |
| 5V,VOH=4.5V | -70 | -100 | — | μA | ||
| RPH | 上拉电阻 | 3V,DATA, WR, CS, RD | 60 | 120 | 200 | kΩ |
| 5V,DATA, WR, CS, RD | 30 | 60 | 100 | kΩ |
交流特性
测试条件:Ta=25°C
| 符号 | 参数 | VDD | 测试条件 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|---|---|---|
| fSYS1 | 系统时钟 | 3V | 内部RC振荡器 | 192 | 256 | 320 | kHz |
| fSYS2 | 系统时钟 | — | 晶体振荡器 | — | 32768 | — | Hz |
| fSYS3 | 系统时钟 | — | 外部时钟源 | — | 256 | — | kHz |
| fLCD | LCD时钟 | — | 内部RC振荡器 | — | fSYS1/1024 | — | Hz |
| — | 晶体振荡器 | — | fSYS2/128 | — | Hz | ||
| — | 外部时钟源 | — | fSYS3/1024 | — | Hz | ||
| tCOM | LCD公共端周期 | — | n:COM数量 | — | n/fLCD | — | s |
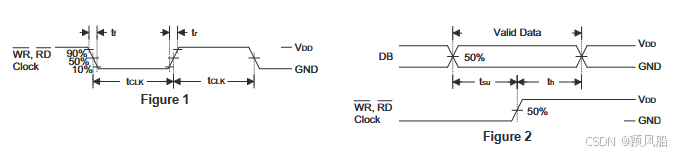
| fCLK1 | 串行数据时钟(WR引脚) | 3V | 占空比50% | 4 | — | 150 | kHz |
| 5V | 占空比50% | 4 | — | 300 | kHz | ||
| fCLK2 | 串行数据时钟(RD引脚) | 3V | 占空比50% | — | — | 75 | kHz |
| 5V | 占空比50% | — | — | 150 | kHz | ||
| fTONE | 音频频率(2kHz) | 3V | 内部RC振荡器 | 1.5 | 2.0 | 2.5 | kHz |
| 音频频率(4kHz) | 3V | 内部RC振荡器 | 3.0 | 4.0 | 5.0 | kHz | |
| tCS | 串行接口复位脉冲宽度 | CS引脚 | 250 | 300 | — | ns | |
| tCLK | WR、RD输入脉冲宽度 | 3V | 写模式 | 3.34 | — | 125 | μs |
| 3V | 读模式 | 6.67 | — | — | μs | ||
| 5V | 写模式 | 1.67 | — | 125 | μs | ||
| 5V | 读模式 | 3.34 | — | — | μs | ||
| tr, tf | 上升/下降时间 | — | 串行数据时钟宽度 | — | — | 120 | ns |
| — | — | — | 160 | ns | |||
| tsu | DATA到WR、RD时钟的建立时间 | — | — | 60 | 120 | — | ns |
| th | DATA到WR、RD时钟的保持时间 | — | — | 250 | 300 | — | ns |
| tsu1 | CS到WR、RD时钟的建立时间 | — | — | 500 | 600 | — | ns |
| th1 | CS到WR、RD时钟的保持时间 | — | — | 250 | 300 | — | ns |
| tOFF | VDD关闭时间 | — | VDD降至0V | 20 | — | — | ms |
| tSR | VDD上升斜率 | — | — | 0.05 | — | — | V/ms |
| tRSTD | 复位后延迟时间 | — | — | 1 | — | — | ms |
备注:1、如果在电源开/关序列中不满足上电复位(POR)时序条件,内部上电复位电路可能无法正常工作。
2、如果在工作期间VDD低于工作电压规格的最小值,也必须满足上电复位时序条件。即VDD必须降至0V并保持至少20ms,然后才能上升到正常工作电压。
功能描述
显示存储器 – RAM
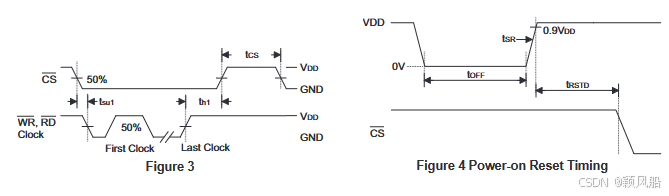
静态显示存储器(RAM)的组织结构为32×4位,用于存储显示数据。RAM的内容直接映射到LCD驱动器的内容。RAM中的数据可以通过读取、写入和读取-修改-写入命令进行访问。以下是RAM到LCD显示模式的映射关系:
RAM映射
| 地址位 (A5, A4, ..., A0) | 数据位 (D3, D2, D1, D0) | LCD段 (SEG0~SEG31) | LCD公共端 (COM0~COM3) |
|---|---|---|---|
| 0 | D3, D2, D1, D0 | SEG0 | COM0 |
| 1 | D3, D2, D1, D0 | SEG1 | COM0 |
| 2 | D3, D2, D1, D0 | SEG2 | COM0 |
| ... | ... | ... | ... |
| 31 | D3, D2, D1, D0 | SEG31 | COM3 |
系统振荡器
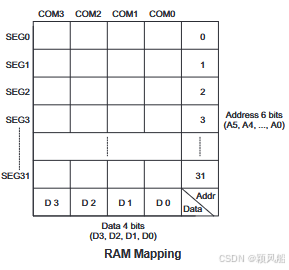
HT1621的系统时钟用于生成时基/看门狗定时器(WDT)时钟频率、LCD驱动时钟以及音频频率。时钟源可以通过软件设置选择以下三种之一:
- 内部RC振荡器(256kHz)
- 晶体振荡器(32.768kHz)
- 外部256kHz时钟
系统振荡器配置
系统振荡器的配置如上所述。当执行SYS DIS命令后,系统时钟将停止,LCD偏置发生器也会关闭。需要注意的是,该命令仅适用于内部RC振荡器或晶体振荡器。一旦系统时钟停止,LCD显示将变为空白,同时时基/看门狗定时器功能也会失效。
功能说明
- 时基/WDT时钟:系统时钟用于生成时基和看门狗定时器的时钟频率。
- LCD驱动时钟:系统时钟用于驱动LCD显示,确保显示内容的刷新。
- 音频频率:系统时钟用于生成蜂鸣器的音频信号(2kHz或4kHz)。
LCD关闭命令与系统电源管理
-
LCD OFF命令
- 功能:用于关闭LCD偏置发生器。
- 效果:执行LCD OFF命令后,LCD偏置发生器停止工作,LCD显示关闭。
-
SYS DIS命令
- 功能:用于关闭系统时钟,进一步降低功耗,作为系统电源关闭命令。
- 适用条件:仅当系统时钟源为内部RC振荡器或晶体振荡器时有效。
- 效果:执行SYS DIS命令后,系统时钟停止,LCD偏置发生器关闭,系统进入低功耗模式。
-
外部时钟源的限制
- 如果选择外部256kHz时钟源作为系统时钟,执行SYS DIS命令无法关闭振荡器,也无法进入低功耗模式。
- 类似地,如果选择晶体振荡器并连接外部32kHz频率源到OSCI引脚,系统无法进入低功耗模式。
-
初始上电状态
- 在系统初始上电时,HT1621默认处于SYS DIS状态,即系统时钟关闭,LCD偏置发生器关闭。
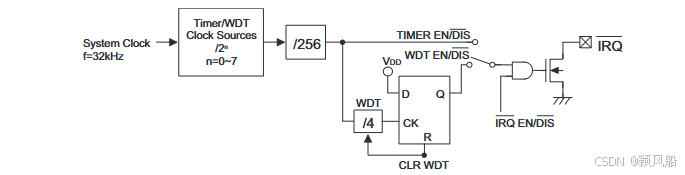
时基与看门狗定时器(WDT)
时基发生器
- 组成:由8级递增纹波计数器构成。
- 功能:用于生成精确的时基信号。
看门狗定时器(WDT)
- 组成:由8级时基发生器和2级递增计数器构成。
- 功能:用于在主机控制器或其他子系统出现异常状态(如未知跳转、执行错误等)时,将其从异常状态中恢复。
- 超时标志:WDT超时后,会设置一个内部WDT超时标志。
-
输出连接:时基发生器和WDT超时标志的输出可以通过命令选项连接到IRQ输出引脚。
时钟源
- 时基发生器和WDT共有8种可选的时钟源,频率由以下公式计算:
其中,n的取值范围为0到7,通过命令选项设置。
- 32kHz来源:系统频率源可以是32.768kHz晶体振荡器、内部256kHz RC振荡器或外部256kHz时钟源。
HT1621/1621G 时基与看门狗定时器(WDT)详细说明
-
系统频率源选择
- 如果选择内部RC振荡器(256kHz)或外部256kHz频率作为系统频率源,默认会通过一个3级预分频器将频率分频至32kHz。
-
时基发生器与WDT的共享计数器
- 时基发生器和WDT共享同一个8级计数器,因此在使用时基发生器和WDT相关命令时需要特别注意。
- 执行WDT DIS命令会禁用时基发生器。
- 执行WDT EN命令不仅会启用时基发生器,还会激活WDT超时标志输出(将WDT超时标志连接到IRQ引脚)。
- 时基发生器和WDT共享同一个8级计数器,因此在使用时基发生器和WDT相关命令时需要特别注意。
-
命令操作
- TIMER EN命令:执行后,WDT与IRQ引脚断开,时基发生器的输出连接到IRQ引脚。
- CLR WDT命令:用于清除WDT。
- CLR TIMER命令:用于清除时基发生器的内容。
- IRQ EN命令:启用IRQ输出,使时基发生器或WDT超时标志的输出出现在IRQ引脚。
- IRQ DIS命令:禁用IRQ输出,IRQ引脚将保持浮空状态。
-
命令执行顺序
- 在执行WDT EN或TIMER EN命令之前,应分别先执行CLR WDT或CLR TIMER命令。
- 在执行IRQ EN命令之前,应先执行CLR WDT或CLR TIMER命令。
- 从WDT模式切换到时基模式之前,必须执行CLR TIMER命令。
-
WDT超时与IRQ引脚状态
- 一旦WDT超时,IRQ引脚将保持逻辑低电平,直到执行CLR WDT或IRQ DIS命令。
- 禁用IRQ输出后,IRQ引脚将保持浮空状态。
-
低功耗模式
- 如果选择内部RC振荡器或晶体振荡器作为系统频率源,可以通过相应的系统命令开启或关闭振荡器,从而进入低功耗模式。在低功耗模式下,时基/WDT功能将全部失效。
- 如果选择外部时钟作为系统频率源,SYS DIS命令无效,无法进入低功耗模式。HT1621将继续工作,直到系统断电或外部时钟源被移除。
-
初始上电状态
- 系统上电后,IRQ输出默认被禁用。
总结
- 时基发生器和WDT共享计数器,使用时需注意命令的执行顺序和影响。
- 选择内部RC振荡器或晶体振荡器时,可通过系统命令进入低功耗模式;选择外部时钟源时,无法进入低功耗模式。
- 系统上电后,IRQ输出默认禁用,需通过命令启用。
系统晶振配置图
定时器和看门狗配置图
音频输出
HT1621内置了一个简单的音频发生器,可以在BZ和BZ引脚上输出一对差分驱动信号,用于生成单音音频。通过执行以下命令,可以选择两种音频频率输出:
- TONE4K命令:将音频频率设置为4kHz。
- TONE2K命令:将音频频率设置为2kHz。
音频输出可以通过以下命令开启或关闭:
- TONE ON命令:开启音频输出。
- TONE OFF命令:关闭音频输出。
BZ和BZ引脚是一对差分驱动输出,用于驱动压电蜂鸣器。当系统禁用或音频输出被抑制时,BZ和BZ引脚将保持低电平
LCD驱动器
HT1621是一款128段(32×4)的LCD驱动器,支持通过软件配置为1/2或1/3偏置,以及2、3或4个公共端的LCD驱动模式。这一特性使得HT1621适用于多种LCD应用场景。
-
LCD驱动时钟
- LCD驱动时钟源自系统时钟,其频率始终为256Hz,无论系统时钟是32.768kHz晶体振荡器、内部256kHz RC振荡器还是外部时钟源。
-
LCD相关命令
- LCD OFF命令:通过禁用LCD偏置发生器关闭LCD显示。
- LCD ON命令:通过启用LCD偏置发生器打开LCD显示。
- BIAS和COM命令:用于配置LCD面板的偏置和公共端模式。
-
命令模式
- 命令模式ID以粗体形式表示,例如1 0 0。如果连续发送多个命令,除第一个命令外,后续命令的命令模式ID可以省略。
通过使用LCD相关命令,HT1621可以与大多数类型的LCD面板兼容,满足多种应用需求。
LCD相关命令表
| 命令名称 | 命令代码 | 功能描述 |
|---|---|---|
| LCD OFF | 1 0 0 0 0 0 0 0 0 1 0 X | 关闭LCD输出,禁用LCD偏置发生器。 |
| LCD ON | 1 0 0 0 0 0 0 0 0 1 1 X | 打开LCD输出,启用LCD偏置发生器。 |
| BIAS & COM | 1 0 0 0 0 1 0 a b X c X | 配置LCD偏置和公共端模式: - c=0:1/2偏置选项 - c=1:1/3偏置选项 - ab=00:2公共端选项 - ab=01:3公共端选项 - ab=10:4公共端选项 |
说明
- X:表示该位可以为0或1,具体值不影响命令功能。
- a, b, c:用于配置LCD的偏置和公共端模式,具体组合如上表所示。
- 这些命令通过软件配置,使HT1621能够适应不同类型的LCD面板需求。
命令格式
HT1621可以通过软件配置,支持两种模式命令:命令模式和数据模式。
-
命令模式
- 模式ID:1 0 0
- 功能:用于配置HT1621资源和传输LCD显示数据。
- 组成:
- 系统配置命令
- 系统频率选择命令
- LCD配置命令
- 音频频率选择命令
- 定时器/WDT设置命令
- 操作命令
-
数据模式
- 功能:包括读取、写入和读取-修改-写入操作。
- 模式ID:
- 读取数据:1 1 0
- 写入数据:1 0 1
- 读取-修改-写入数据:1 0 1
操作模式ID
| 操作模式 | 模式ID |
|---|---|
| 读取数据 | 1 1 0 |
| 写入数据 | 1 0 1 |
| 读取-修改-写入数据 | 1 0 1 |
| 命令模式 | 1 0 0 |
模式命令的使用规则
-
模式命令的发送
- 在传输数据或命令之前,必须先发送模式命令。
-
连续命令的简化
- 如果连续发送多个命令,除第一个命令外,后续命令的模式ID(即1 0 0)可以省略。
-
非连续操作模式的处理
- 当系统处于非连续命令或非连续地址数据模式时,CS引脚应设置为“1”,以重置之前的操作模式。
- 当CS引脚从“1”返回“0”时,必须先发送新的操作模式ID。
接口说明
HT1621与主机控制器之间的接口仅需四根线:
-
CS引脚
- 功能:用于初始化串行接口电路并终止通信。
- 操作:
- 当CS引脚设置为“1”时,主机控制器与HT1621之间的数据和命令传输被禁用并初始化。
- 在发送模式命令或切换模式之前,需要一个高电平脉冲来初始化HT1621的串行接口。
-
DATA引脚
- 功能:串行数据输入/输出线。
- 操作:所有需要读取或写入的数据以及命令都通过DATA线传输。
-
RD引脚
- 功能:读时钟输入。
- 操作:在RD信号的下降沿,RAM中的数据被输出到DATA线上。建议主机控制器在RD信号的上升沿和下一个下降沿之间读取数据。
-
WR引脚
- 功能:写时钟输入。
- 操作:在WR信号的上升沿,DATA线上的数据、地址和命令被写入HT1621。
-
IRQ引脚(可选)
- 功能:用作主机控制器与HT1621之间的接口。
- 配置:通过软件设置,IRQ引脚可以选择作为定时器输出或WDT溢出标志输出。
- 应用:主机控制器通过连接HT1621的IRQ引脚,可以实现时基或WDT功能。
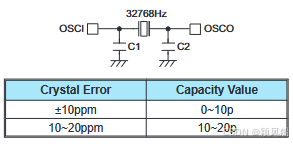
晶体选择
-
晶体连接
- 一个32768Hz的晶体可以直接连接到HT1621的OSCI和OSCO引脚。
-
负载电容
- 为了获得准确的频率,需要额外添加两个负载电容(C1和C2)。
- 电容值的选择取决于晶体的精度。
-
电容值建议
时序图
单次读模式
- 操作:从HT1621的RAM中读取数据。
- 时序:
- 首先发送模式ID 1 1 0,接着发送6位地址(A5~A0)。
- 在RD信号的下降沿,RAM中的数据被输出到DATA线上。
- 主机控制器在RD信号的上升沿和下一个下降沿之间读取数据。
伪代码
1. 设置CS引脚为低电平(0)以启动通信。
2. 发送读取模式ID:1 1 0。
3. 发送6位目标地址(A5~A0)。
4. 设置RD引脚为高电平,然后拉低RD引脚(下降沿触发数据输出)。
5. 在RD引脚的上升沿和下一个下降沿之间读取DATA引脚上的4位数据(D3~D0)。
6. 设置CS引脚为高电平(1)以结束通信。类C代码
void readSingleAddress(uint8_t address) {
// 启动通信
digitalWrite(CS_PIN, LOW);
// 发送读取模式ID:1 1 0
sendBits(0b110);
// 发送6位地址
sendBits(address);
// 触发RD信号读取数据
digitalWrite(RD_PIN, HIGH);
digitalWrite(RD_PIN, LOW);
// 读取4位数据
uint8_t data = readBits(4);
// 结束通信
digitalWrite(CS_PIN, HIGH);
return data;
}连续读模式
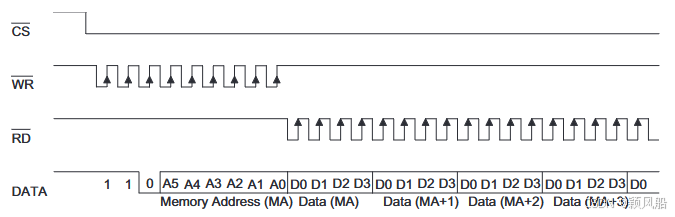
伪代码
1. 设置CS引脚为低电平(0)以启动通信。
2. 发送读取模式ID:1 1 0。
3. 发送6位起始地址(A5~A0)。
4. 循环读取数据:
a. 设置RD引脚为高电平,然后拉低RD引脚(下降沿触发数据输出)。
b. 在RD引脚的上升沿和下一个下降沿之间读取DATA引脚上的4位数据(D3~D0)。
c. 地址自动递增,准备读取下一个地址的数据。
5. 设置CS引脚为高电平(1)以结束通信。类C代码
void readMultipleAddresses(uint8_t startAddress, uint8_t numReads) {
// 启动通信
digitalWrite(CS_PIN, LOW);
// 发送读取模式ID:1 1 0
sendBits(0b110);
// 发送起始地址
sendBits(startAddress);
// 循环读取数据
for (uint8_t i = 0; i < numReads; i++) {
// 触发RD信号读取数据
digitalWrite(RD_PIN, HIGH);
digitalWrite(RD_PIN, LOW);
// 读取4位数据
uint8_t data = readBits(4);
// 处理读取的数据(例如存储或打印)
processData(data);
}
// 结束通信
digitalWrite(CS_PIN, HIGH);
}关键点说明
- 模式ID:读取模式的ID为
1 1 0,必须在通信开始时发送。 - 地址:6位地址(A5~A0)用于指定读取的目标RAM位置。
- RD信号:RD引脚的下降沿触发数据输出,上升沿和下一个下降沿之间是数据读取的有效窗口。
- 连续读取:在连续读取模式下,地址会自动递增,无需重复发送地址。
单次写模式
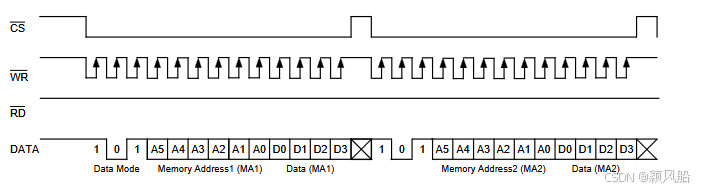
伪代码
1. 设置CS引脚为低电平(0)以启动通信。
2. 发送写入模式ID:1 0 1。
3. 发送6位目标地址(A5~A0)。
4. 发送4位数据(D3~D0)。
5. 设置CS引脚为高电平(1)以结束通信。类C代码
// 单地址写入
void writeSingleAddress(uint8_t address, uint8_t data) {
// 启动通信
digitalWrite(CS_PIN, LOW);
// 发送写入模式ID:1 0 1
sendBits(0b101, 3);
// 发送6位地址
sendBits(address, 6);
// 发送4位数据
sendBits(data, 4);
// 结束通信
digitalWrite(CS_PIN, HIGH);
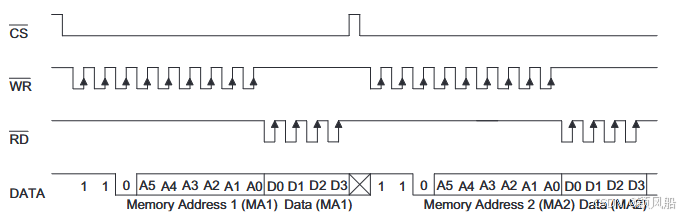
}连续写模式
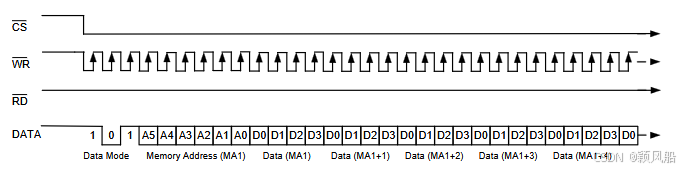
伪代码
1. 设置CS引脚为低电平(0)以启动通信。
2. 发送写入模式ID:1 0 1。
3. 发送第一个6位地址(A5~A0)。
4. 发送第一个4位数据(D3~D0)。
5. 发送第二个6位地址(A5~A0)。
6. 发送第二个4位数据(D3~D0)。
7. 重复步骤5~6,直到所有数据写入完成。
8. 设置CS引脚为高电平(1)以结束通信。类C代码
// 连续地址写入
void writeMultipleAddresses(uint8_t addresses[], uint8_t data[], uint8_t numWrites) {
// 启动通信
digitalWrite(CS_PIN, LOW);
// 发送写入模式ID:1 0 1
sendBits(0b101, 3);
// 循环写入数据
for (uint8_t i = 0; i < numWrites; i++) {
// 发送6位地址
sendBits(addresses[i], 6);
// 发送4位数据
sendBits(data[i], 4);
}
// 结束通信
digitalWrite(CS_PIN, HIGH);
}关键点说明
- 模式ID:写入模式的ID为
1 0 1,必须在通信开始时发送。 - 地址:6位地址(A5~A0)用于指定写入的目标RAM位置。
- 数据:4位数据(D3~D0)被写入指定地址的RAM中。
- WR信号:在WR信号的上升沿,数据被写入RAM。
读取-修改-写入模式
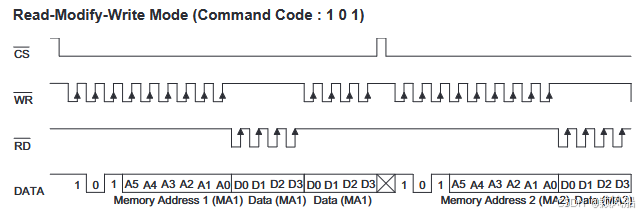
解释说明
-
读取-修改-写入模式
- 模式ID:读取-修改-写入模式的命令代码为
1 0 1。 - 操作:从指定地址读取数据,修改后再写回同一地址。
- 模式ID:读取-修改-写入模式的命令代码为
-
数据传输格式
- 首先发送模式ID
1 0 1。 - 接着发送6位地址(A5~A0)。
- 读取4位数据(D3~D0)。
- 修改数据后,将修改后的数据写回同一地址。
- 首先发送模式ID
-
时序
- 在RD信号的下降沿读取数据。
- 在WR信号的上升沿写入修改后的数据。
伪代码
1. 设置CS引脚为低电平(0)以启动通信。
2. 发送读取-修改-写入模式ID:1 0 1。
3. 发送6位目标地址(A5~A0)。
4. 触发RD信号读取4位数据(D3~D0)。
5. 修改读取的数据。
6. 将修改后的数据写回同一地址。
7. 设置CS引脚为高电平(1)以结束通信。类C代码
// 读取-修改-写入操作
void readModifyWrite(uint8_t address) {
// 启动通信
digitalWrite(CS_PIN, LOW);
// 发送读取-修改-写入模式ID:1 0 1
sendBits(0b101, 3);
// 发送6位地址
sendBits(address, 6);
// 触发RD信号读取4位数据
digitalWrite(RD_PIN, HIGH);
digitalWrite(RD_PIN, LOW);
uint8_t data = readBits(4);
// 修改数据(示例:将最低位取反)
data ^= 0x01;
// 将修改后的数据写回同一地址
sendBits(data, 4);
// 结束通信
digitalWrite(CS_PIN, HIGH);
}关键点说明
- 模式ID:读取-修改-写入模式的ID为
1 0 1,必须在通信开始时发送。 - 地址:6位地址(A5~A0)用于指定读取和写入的目标RAM位置。
- 数据:读取4位数据(D3~D0),修改后写回同一地址。
- RD信号:在RD信号的下降沿读取数据。
- WR信号:在WR信号的上升沿写入修改后的数据。
读取-修改-写入模式(连续地址访问)
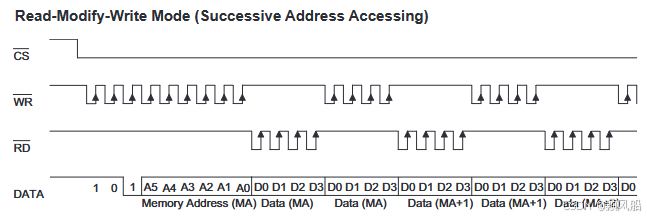
解释说明
-
读取-修改-写入模式(连续地址访问)
- 模式ID:读取-修改-写入模式的命令代码为
1 0 1。 - 操作:从指定地址开始,依次读取、修改并写入多个连续地址的数据。
- 模式ID:读取-修改-写入模式的命令代码为
-
数据传输格式
- 首先发送模式ID
1 0 1。 - 接着发送起始地址(A5~A0)。
- 依次读取、修改并写入多个连续地址的数据。
- 首先发送模式ID
-
时序
- 在RD信号的下降沿读取数据。
- 在WR信号的上升沿写入修改后的数据。
- 地址自动递增,无需重复发送地址。
伪代码
1. 设置CS引脚为低电平(0)以启动通信。
2. 发送读取-修改-写入模式ID:1 0 1。
3. 发送6位起始地址(A5~A0)。
4. 循环操作:
a. 触发RD信号读取4位数据(D3~D0)。
b. 修改读取的数据。
c. 将修改后的数据写回当前地址。
d. 地址自动递增,准备处理下一个地址。
5. 设置CS引脚为高电平(1)以结束通信。类C代码
// 连续地址读取-修改-写入操作
void readModifyWriteMultiple(uint8_t startAddress, uint8_t numOperations) {
// 启动通信
digitalWrite(CS_PIN, LOW);
// 发送读取-修改-写入模式ID:1 0 1
sendBits(0b101, 3);
// 发送6位起始地址
sendBits(startAddress, 6);
// 循环操作
for (uint8_t i = 0; i < numOperations; i++) {
// 触发RD信号读取4位数据
digitalWrite(RD_PIN, HIGH);
digitalWrite(RD_PIN, LOW);
uint8_t data = readBits(4);
// 修改数据(示例:将最低位取反)
data ^= 0x01;
// 将修改后的数据写回当前地址
sendBits(data, 4);
}
// 结束通信
digitalWrite(CS_PIN, HIGH);
}关键点说明
- 模式ID:读取-修改-写入模式的ID为
1 0 1,必须在通信开始时发送。 - 地址:6位起始地址(A5~A0)用于指定第一个操作的目标RAM位置。
- 数据:依次读取、修改并写入多个连续地址的数据。
- RD信号:在RD信号的下降沿读取数据。
- WR信号:在WR信号的上升沿写入修改后的数据。
- 地址自动递增:在连续操作中,地址会自动递增,无需重复发送地址。
命令模式
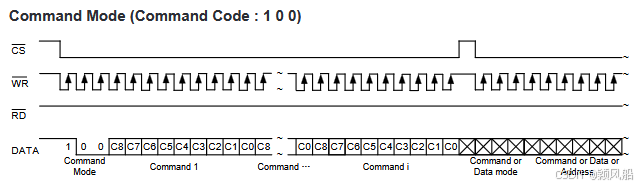
解释说明
-
命令模式
- 模式ID:命令模式的命令代码为
1 0 0。 - 功能:用于配置HT1621的资源或执行特定操作。
- 模式ID:命令模式的命令代码为
-
数据传输格式
- 首先发送模式ID
1 0 0。 - 接着发送具体的命令(C7~C0)。
- 命令可以是系统配置、LCD配置、音频频率选择、定时器/WDT设置等。
- 首先发送模式ID
-
时序
- 在WR信号的上升沿,命令被写入HT1621。
伪代码
1. 设置CS引脚为低电平(0)以启动通信。
2. 发送命令模式ID:1 0 0。
3. 发送具体命令(C7~C0)。
4. 设置CS引脚为高电平(1)以结束通信。类C伪代码
// 命令模式操作
void commandMode(uint8_t command) {
// 启动通信
digitalWrite(CS_PIN, LOW);
// 发送命令模式ID:1 0 0
sendBits(0b100, 3);
// 发送具体命令(C7~C0)
sendBits(command, 8);
// 结束通信
digitalWrite(CS_PIN, HIGH);
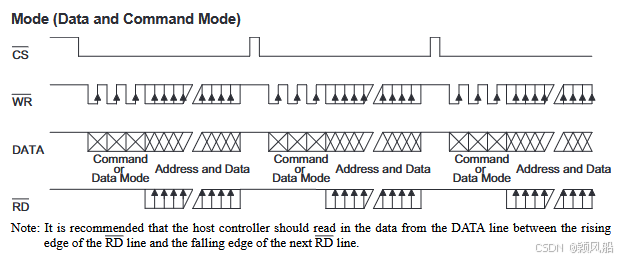
}数据模式和命令模式
解释说明
-
数据模式和命令模式
- 数据模式:用于读取或写入数据,包括读取、写入和读取-修改-写入操作。
- 命令模式:用于配置HT1621的资源或执行特定操作。
-
数据传输格式
- 数据模式:
- 读取数据:模式ID
1 1 0,接着发送地址,然后在RD信号的下降沿读取数据。 - 写入数据:模式ID
1 0 1,接着发送地址和数据,在WR信号的上升沿写入数据。
- 读取数据:模式ID
- 命令模式:模式ID
1 0 0,接着发送具体命令(C7~C0)。
- 数据模式:
-
时序
- 在RD信号的下降沿读取数据。
- 在WR信号的上升沿写入数据或命令。
- 建议主机控制器在RD信号的上升沿和下一个下降沿之间读取数据。
伪代码
数据模式(读取数据)
1. 设置CS引脚为低电平(0)以启动通信。
2. 发送读取模式ID:1 1 0。
3. 发送6位地址(A5~A0)。
4. 触发RD信号读取4位数据(D3~D0)。
5. 设置CS引脚为高电平(1)以结束通信。数据模式(写入数据)
1. 设置CS引脚为低电平(0)以启动通信。
2. 发送写入模式ID:1 0 1。
3. 发送6位地址(A5~A0)。
4. 发送4位数据(D3~D0)。
5. 设置CS引脚为高电平(1)以结束通信。命令模式
1. 设置CS引脚为低电平(0)以启动通信。
2. 发送命令模式ID:1 0 0。
3. 发送具体命令(C7~C0)。
4. 设置CS引脚为高电平(1)以结束通信。类C代码
// 发送指定数量的位
void sendBits(uint8_t data, uint8_t numBits) {
for (int i = numBits - 1; i >= 0; i--) {
digitalWrite(DATA_PIN, (data >> i) & 0x01);
digitalWrite(WR_PIN, HIGH);
digitalWrite(WR_PIN, LOW);
}
}
// 读取指定数量的位
uint8_t readBits(uint8_t numBits) {
uint8_t data = 0;
for (int i = 0; i < numBits; i++) {
digitalWrite(RD_PIN, HIGH);
digitalWrite(RD_PIN, LOW);
data |= (digitalRead(DATA_PIN) << i);
}
return data;
}
// 数据模式(读取数据)
uint8_t readData(uint8_t address) {
// 启动通信
digitalWrite(CS_PIN, LOW);
// 发送读取模式ID:1 1 0
sendBits(0b110, 3);
// 发送6位地址
sendBits(address, 6);
// 触发RD信号读取4位数据
digitalWrite(RD_PIN, HIGH);
digitalWrite(RD_PIN, LOW);
uint8_t data = readBits(4);
// 结束通信
digitalWrite(CS_PIN, HIGH);
return data;
}
// 数据模式(写入数据)
void writeData(uint8_t address, uint8_t data) {
// 启动通信
digitalWrite(CS_PIN, LOW);
// 发送写入模式ID:1 0 1
sendBits(0b101, 3);
// 发送6位地址
sendBits(address, 6);
// 发送4位数据
sendBits(data, 4);
// 结束通信
digitalWrite(CS_PIN, HIGH);
}
// 命令模式
void commandMode(uint8_t command) {
// 启动通信
digitalWrite(CS_PIN, LOW);
// 发送命令模式ID:1 0 0
sendBits(0b100, 3);
// 发送具体命令(C7~C0)
sendBits(command, 8);
// 结束通信
digitalWrite(CS_PIN, HIGH);
}
应用电路说明
-
主机控制器与HT1621显示系统的连接
- IRQ引脚:可选连接,用于定时器或WDT溢出标志输出。
- DATA引脚:用于数据传输的串行数据输入/输出线。
- CS引脚:用于初始化串行接口电路并终止通信。
- RD引脚:读时钟输入,用于读取数据。
- WR引脚:写时钟输入,用于写入数据或命令。
-
时钟源选择
- 内部RC振荡器:默认频率为256kHz。
- 外部晶体振荡器:建议使用32.768kHz晶体,需连接OSCI和OSCO引脚,并添加负载电容(C1, C2)。
- 外部时钟源:可通过OSCI引脚输入256kHz外部时钟。
-
LCD驱动配置
- VLCD引脚:用于调节LCD工作电压,必须小于或等于VDD。
- 偏置和占空比:支持1/2或1/3偏置,以及1/2、1/3或1/4占空比。
- COM和SEG引脚:用于驱动LCD面板的公共端和段端。
-
音频输出
- BZ和BZ引脚:用于驱动压电蜂鸣器的差分输出。
-
电源连接
- VDD:正电源,通常为2.4V~5.2V。
- VSS:接地。
设计要点
-
IRQ和RD引脚的连接
- 根据MCU的需求选择是否连接IRQ引脚。
- RD引脚用于读取数据,需根据时序要求正确连接。
-
VLCD电压调节
- VLCD引脚电压必须小于或等于VDD。
- 通过调节VR电阻,适配LCD面板的显示电压(VLCD)。
-
时钟源配置
- 使用32.768kHz晶体时,需添加负载电容(C1, C2),电容值根据晶体精度选择(建议6pF~18pF)。
- 使用外部时钟源时,直接通过OSCI引脚输入256kHz时钟。
-
外部上拉电阻
- 根据用户的时间基准时钟需求,调整外部上拉电阻(R)的值。
C1/C2推荐容值
| 容值偏差 | 容值 |
| ±10ppm | 0~10p |
| 10~20ppm | 10~20p |
命令表
| 命令名称 | 命令代码 | 功能描述 | 默认值 |
|---|---|---|---|
| READ | 1 1 0 A5A4A3A2A1A0 | 从RAM中读取数据 | - |
| WRITE | 1 0 1 A5A4A3A2A1A0 | 将数据写入RAM | - |
| READ-MODIFY-WRITE | 1 0 1 A5A4A3A2A1A0 | 从RAM中读取数据,修改后写回RAM | - |
| SYS DIS | 1 0 0 0000-0000-X | 关闭系统振荡器和LCD偏置发生器 | 是 |
| SYS EN | 1 0 0 0000-0001-X | 开启系统振荡器 | - |
| LCD OFF | 1 0 0 0000-0010-X | 关闭LCD偏置发生器 | 是 |
| LCD ON | 1 0 0 0000-0011-X | 开启LCD偏置发生器 | - |
| TIMER DIS | 1 0 0 0000-0100-X | 禁用时基输出 | - |
| WDT DIS | 1 0 0 0000-0101-X | 禁用WDT超时标志输出 | - |
| TIMER EN | 1 0 0 0000-0110-X | 启用时基输出 | - |
| WDT EN | 1 0 0 0000-0111-X | 启用WDT超时标志输出 | - |
| TONE OFF | 1 0 0 0000-1000-X | 关闭音频输出 | 是 |
| TONE ON | 1 0 0 0000-1001-X | 开启音频输出 | - |
| CLR TIMER | 1 0 0 0000-11XX-X | 清除时基发生器的内容 | - |
| CLR WDT | 1 0 0 0000-111X-X | 清除WDT阶段的内容 | - |
| XTAL 32K | 1 0 0 0001-01XX-X | 系统时钟源:32.768kHz晶体振荡器 | - |
| RC 256K | 1 0 0 0001-10XX-X | 系统时钟源:256kHz内部RC振荡器 | 是 |
| EXT 256K | 1 0 0 0001-11XX-X | 系统时钟源:256kHz外部时钟源 | - |
| BIAS 1/2 | 1 0 0 0010-abX0-X | LCD偏置选项:1/2偏置 ab=00:2公共端 ab=01:3公共端 ab=10:4公共端 |
- |
| BIAS 1/3 | 1 0 0 0010-abX1-X | LCD偏置选项:1/3偏置 ab=00:2公共端 ab=01:3公共端 ab=10:4公共端 |
- |
| TONE 4K | 1 0 0 010X-XXXX-X | 音频频率:4kHz | - |
| TONE 2K | 1 0 0 011X-XXXX-X | 音频频率:2kHz | - |
| IRQ DIS | 1 0 0 100X-0XXX-X | 禁用IRQ输出 | 是 |
| IRQ EN | 1 0 0 100X-1XXX-X | 启用IRQ输出 | - |
| F1 | 1 0 0 101X-X000-X | 时基/WDT时钟输出:1Hz WDT超时标志:4s后触发 |
- |
| F2 | 1 0 0 101X-X001-X | 时基/WDT时钟输出:2Hz WDT超时标志:2s后触发 |
- |
| F4 | 1 0 0 101X-X010-X | 时基/WDT时钟输出:4Hz WDT超时标志:1s后触发 |
- |
| F8 | 1 0 0 101X-X011-X | 时基/WDT时钟输出:8Hz WDT超时标志:0.5s后触发 |
- |
| F16 | 1 0 0 101X-X100-X | 时基/WDT时钟输出:16Hz WDT超时标志:0.25s后触发 |
- |
| F32 | 1 0 0 101X-X101-X | 时基/WDT时钟输出:32Hz WDT超时标志:0.125s后触发 |
- |
| F64 | 1 0 0 101X-X110-X | 时基/WDT时钟输出:64Hz WDT超时标志:0.0625s后触发 |
- |
| F128 | 1 0 0 101X-X111-X | 时基/WDT时钟输出:128Hz WDT超时标志:0.03125s后触发 |
是 |
| TEST | 1 0 0 1110-0000-X | 测试模式(用户勿用) | - |
| NORMAL | 1 0 0 1110-0011-X | 正常模式 | 是 |
说明
- 命令代码:每个命令的代码格式为
1 0 0或1 0 1或1 1 0,后跟具体的命令位。 - 功能描述:详细说明了每个命令的作用。
- 默认值:标记为“是”的命令表示HT1621上电后的默认状态。
补充说明
-
命令格式中的“X”
- “X”表示无关位(Don't care),可以是0或1,不影响命令功能。
-
地址和数据
- A5~A0:6位RAM地址,用于指定操作的目标位置。
- D3~D0:4位RAM数据,用于读取或写入操作。
-
数据/命令模式(D/C)
- 数据模式:用于读取或写入数据,包括读取、写入和读取-修改-写入操作。
- 命令模式:用于配置HT1621的资源或执行特定操作。
-
默认值(Def.)
- 标记为“是”的命令表示HT1621上电后的默认状态。
-
模式命令
- 1 1 0:读取模式。
- 1 0 1:写入模式或读取-修改-写入模式。
- 1 0 0:命令模式。
- 如果连续发送多个命令,除第一个命令外,后续命令的模式ID可以省略。
-
时钟源
- 音频频率和时基/WDT时钟频率的源可以是:
- 内部256kHz RC振荡器。
- 32.768kHz晶体振荡器。
- 外部256kHz时钟源。
- 频率计算基于上述系统时钟源。
- 音频频率和时基/WDT时钟频率的源可以是:
-
上电复位初始化
- 建议主机控制器在上电复位后初始化HT1621,因为上电复位可能失败,导致HT1621功能异常。
关键点总结
-
命令模式ID:
- 命令模式的ID为
1 0 0,必须在通信开始时发送。 - 连续命令中,后续命令的模式ID可以省略。
- 命令模式的ID为
-
时钟源选择:
- 根据应用需求选择合适的时钟源(内部RC振荡器、晶体振荡器或外部时钟源)。
-
上电初始化:
- 上电后必须初始化HT1621,以确保其正常工作。
-
命令格式:
- 每个命令的格式包括模式ID、地址和数据(如适用)。
- “X”表示无关位,可以是0或1。
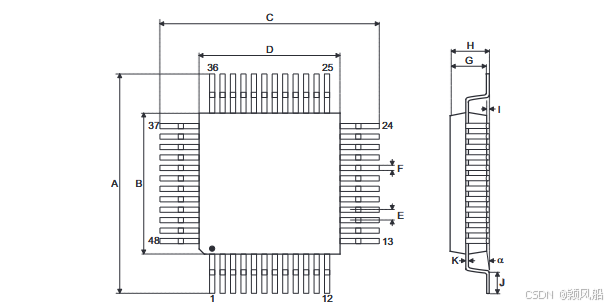
封装尺寸
44-pin LQFP(10mm×10mm) (FP2.0mm)
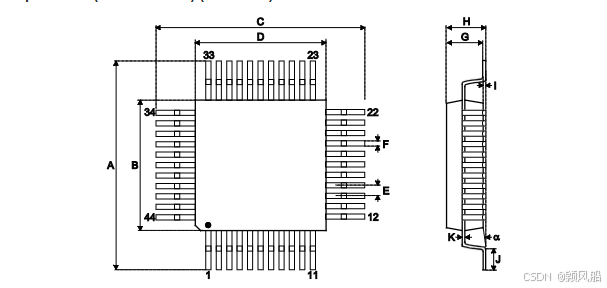
| 符号 | 尺寸(英寸) | 最小值 | 标称值 | 最大值 | 说明 |
|---|---|---|---|---|---|
| A | 长 | - | 0.472 | - | 基本尺寸(BSC) |
| B | 宽 | - | 0.394 | - | 基本尺寸(BSC) |
| C | 长 | - | 0.472 | - | 基本尺寸(BSC) |
| D | 宽 | - | 0.394 | - | 基本尺寸(BSC) |
| E | 引脚间距 | - | 0.032 | - | 基本尺寸(BSC) |
| F | 引脚宽度 | 0.012 | 0.015 | 0.018 | - |
| G | 引脚长度 | 0.053 | 0.055 | 0.057 | - |
| H | 封装高度 | - | - | 0.063 | - |
| I | 引脚倾斜角度 | 0.002 | - | 0.006 | - |
| J | 引脚间距 | 0.018 | 0.024 | 0.030 | - |
| K | 引脚间距 | 0.004 | - | 0.008 | - |
| α | 引脚倾斜角度 | 0° | - | 7° | - |
| 符号 | 尺寸(毫米) | 最小值 | 标称值 | 最大值 | 说明 |
|---|---|---|---|---|---|
| A | 长 | - | 12.00 | - | 基本尺寸(BSC) |
| B | 宽 | - | 10.00 | - | 基本尺寸(BSC) |
| C | 长 | - | 12.00 | - | 基本尺寸(BSC) |
| D | 宽 | - | 10.00 | - | 基本尺寸(BSC) |
| E | 引脚间距 | - | 0.80 | - | 基本尺寸(BSC) |
| F | 引脚宽度 | 0.30 | 0.37 | 0.45 | - |
| G | 引脚长度 | 1.35 | 1.40 | 1.45 | - |
| H | 封装高度 | - | - | 1.60 | - |
| I | 引脚倾斜角度 | 0.05 | - | 0.15 | - |
| J | 引脚间距 | 0.45 | 0.60 | 0.75 | - |
| K | 引脚间距 | 0.09 | - | 0.20 | - |
| α | 引脚倾斜角度 | 0° | - | 7° | - |
48-pin SSOP(300mil)
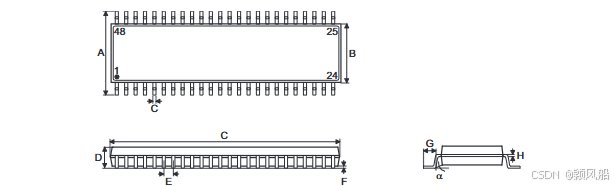
| 符号 | 尺寸(英寸) | 最小值 | 标称值 | 最大值 | 说明 |
|---|---|---|---|---|---|
| A | 长 | 0.395 | - | 0.420 | - |
| B | 宽 | 0.291 | 0.295 | 0.299 | - |
| C | 高度 | 0.008 | - | 0.014 | - |
| C’ | 长 | 0.620 | 0.625 | 0.630 | - |
| D | 宽 | 0.095 | 0.102 | 0.110 | - |
| E | 引脚间距 | - | 0.025 | - | 基本尺寸(BSC) |
| F | 引脚宽度 | 0.008 | 0.012 | 0.016 | - |
| G | 引脚长度 | 0.020 | - | 0.040 | - |
| H | 引脚倾斜角度 | 0.005 | - | 0.010 | - |
| α | 引脚倾斜角度 | 0° | - | 8° | - |
| 符号 | 尺寸(毫米) | 最小值 | 标称值 | 最大值 | 说明 |
|---|---|---|---|---|---|
| A | 长 | 10.03 | - | 10.67 | - |
| B | 宽 | 7.39 | 7.49 | 7.59 | - |
| C | 高度 | 0.20 | - | 0.34 | - |
| C’ | 长 | 15.75 | 15.88 | 16.00 | - |
| D | 宽 | 2.41 | 2.59 | 2.79 | - |
| E | 引脚间距 | - | 0.635 | - | 基本尺寸(BSC) |
| F | 引脚宽度 | 0.20 | 0.30 | 0.41 | - |
| G | 引脚长度 | 0.51 | - | 1.02 | - |
| H | 引脚倾斜角度 | 0.13 | - | 0.25 | - |
| α | 引脚倾斜角度 | 0° | - | 8° | - |
48-pin LQFP (7mm×7mm)
封装尺寸表
| 符号 | 尺寸(英寸) | 最小值 | 标称值 | 最大值 | 说明 |
|---|---|---|---|---|---|
| A | 长 | - | 0.354 | - | 基本尺寸(BSC) |
| B | 宽 | - | 0.276 | - | 基本尺寸(BSC) |
| C | 长 | - | 0.354 | - | 基本尺寸(BSC) |
| D | 宽 | - | 0.276 | - | 基本尺寸(BSC) |
| E | 引脚间距 | - | 0.020 | - | 基本尺寸(BSC) |
| F | 引脚宽度 | 0.007 | 0.009 | 0.011 | - |
| G | 引脚长度 | 0.053 | 0.055 | 0.057 | - |
| H | 封装高度 | - | - | 0.063 | - |
| I | 引脚倾斜角度 | 0.002 | - | 0.006 | - |
| J | 引脚间距 | 0.018 | 0.024 | 0.030 | - |
| K | 引脚间距 | 0.004 | - | 0.008 | - |
| α | 引脚倾斜角度 | 0° | - | 7° | - |
| 符号 | 尺寸(毫米) | 最小值 | 标称值 | 最大值 | 说明 |
|---|---|---|---|---|---|
| A | 长 | - | 9.00 | - | 基本尺寸(BSC) |
| B | 宽 | - | 7.00 | - | 基本尺寸(BSC) |
| C | 长 | - | 9.00 | - | 基本尺寸(BSC) |
| D | 宽 | - | 7.00 | - | 基本尺寸(BSC) |
| E | 引脚间距 | - | 0.50 | - | 基本尺寸(BSC) |
| F | 引脚宽度 | 0.17 | 0.22 | 0.27 | - |
| G | 引脚长度 | 1.35 | 1.40 | 1.45 | - |
| H | 封装高度 | - | - | 1.60 | - |
| I | 引脚倾斜角度 | 0.05 | - | 0.15 | - |
| J | 引脚间距 | 0.45 | 0.60 | 0.75 | - |
| K | 引脚间距 | 0.09 | - | 0.20 | - |
| α | 引脚倾斜角度 | 0° | - | 7° | - |

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 10
10 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)