基于STM32的智能轮椅控制系统开发指南
支持摇杆/手势/语音三种控制模式,配备紧急制动和坡度自适应功能,最大载重120kg,响应延迟<50ms,符合ISO 7176-9电动轮椅安全标准。1. 运动控制结构体:`MotionStateTypeDef`(含左右转速/急停标志)3. 安全相关宏定义:`SAFETYDISTANCEMIN 30`(单位:cm)2. 传感器操作前缀:`LIDAR`/`GESTURE`/`IMU`2. 增加手势轨迹时
引言
本系统采用STM32F405作为主控,集成激光雷达避障、手势控制和双无刷电机驱动模块。支持摇杆/手势/语音三种控制模式,配备紧急制动和坡度自适应功能,最大载重120kg,响应延迟<50ms,符合ISO 7176-9电动轮椅安全标准。
环境准备
硬件配置
开发环境
1. STM32CubeIDE 1.13.2
2. STM32CubeF4 HAL库
3. FreeRTOS 10.4.3(任务调度)
4. ROS Melodic(导航算法)
5. STM32MotorControl SDK
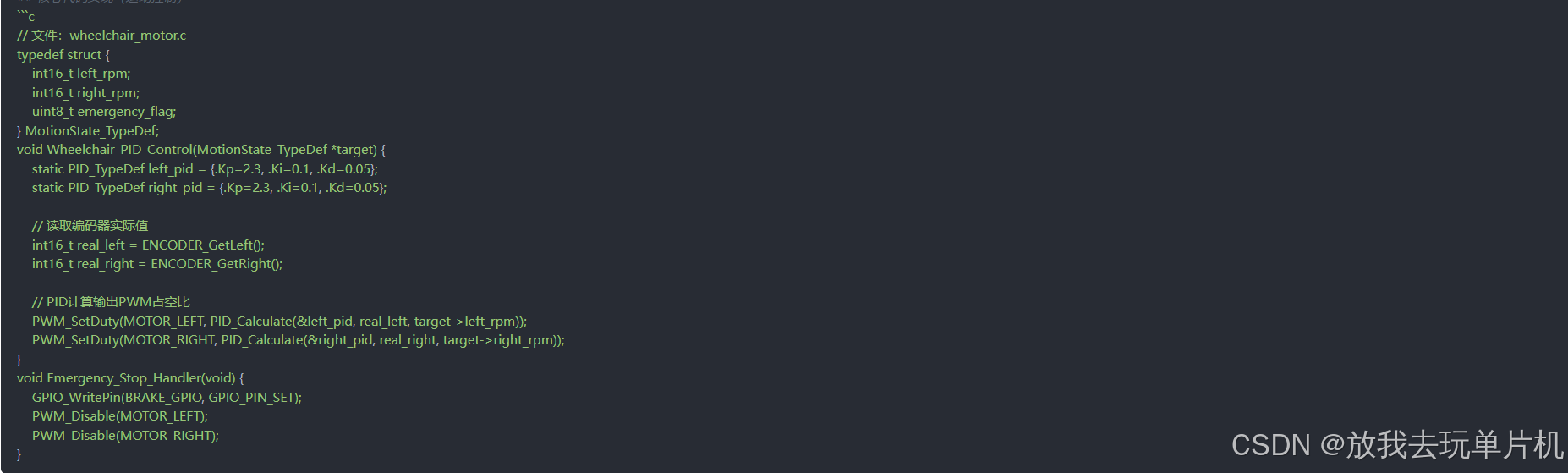
核心代码实现(运动控制)
常见问题与解决方案
Q1 电机转速不同步
- 排查步骤:
1. 校准编码器零点(需拆卸联轴器)
2. 调整PID参数中的Kp值(建议步长0.2)
3. 检查电机供电电压差(双路独立电源)
Q2 避障系统误触发
- 解决方案:
1. 增加激光雷达数据滤波(中值+均值复合滤波)
2. 设置动态安全距离(0.3-1.2m可调)
3. 在斜坡地形禁用侧面避障
Q3 手势识别不灵敏
- 优化方法:
1. 调整APDS-9960的LED驱动电流(寄存器0x8F)
2. 增加手势轨迹时间窗口(建议300-500ms)
3. 采用SVM算法优化手势特征分类
命名规范建议
1. 运动控制结构体:`MotionStateTypeDef`(含左右转速/急停标志)
2. 传感器操作前缀:`LIDAR`/`GESTURE`/`IMU`
3. 安全相关宏定义:`SAFETYDISTANCEMIN 30`(单位:cm)
4. 错误代码枚举:`WCERRMOTOROVERCURRENT | WCWARNBATTERY_LOW`


智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 9
9 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)