【CP AUTOSAR】CanSM(CANStateManager)分析和使用
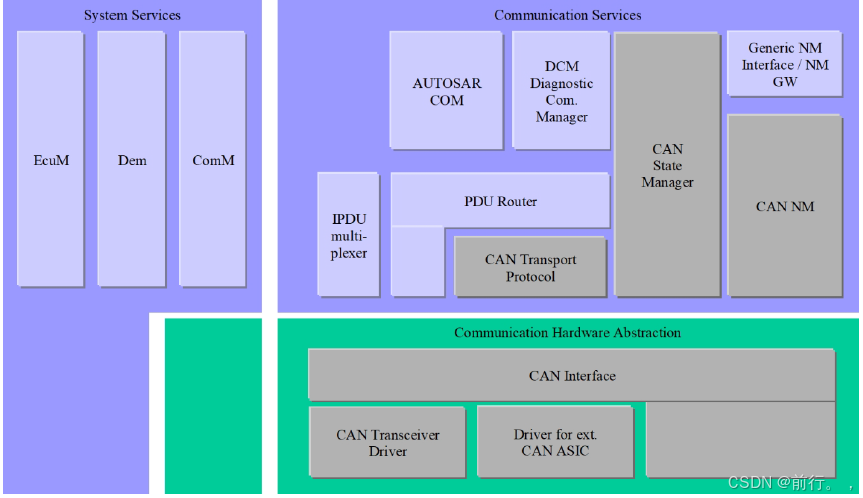
本文介绍CP AUTOSAR 架构下的CanSM组件,基于S32K312芯片、Vector提供的CBD包,使用DaVinci Configurator工具进行配置的经验。CanSM组件位于Communication Services层,通常被ComM所调用。CanSM组件负责管理CAN总线的状态。上图为CP AUTOSAR CAN网络架构。
文章目录
前言
本文介绍CP AUTOSAR 架构下的CanSM组件,基于S32K312芯片、Vector提供的CBD包,使用DaVinci Configurator工具进行配置的经验。
CanSM组件位于Communication Services层,通常被ComM所调用。
CanSM组件负责管理CAN总线的状态。
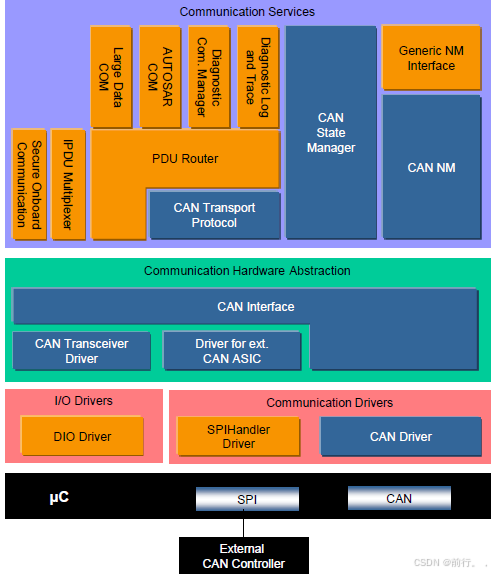
上图为CP AUTOSAR CAN网络架构。
一、CanSM功能概述
 CanSM是CAN网络状态管理器,ECU可能存在多路CAN,CanSM为ECU的每路CAN进行管理即该CAN网络能不能发送报文、接收报文、BUSOFF处理、ECU的CAN波特率切换、ECU的唤醒功能管理等,通过接收ComM的请求或者接口被调用,然后CanSM再调用CanIf组件,对CAN控制器或CAN收发器进行状态切换,切换完后将状态通知给ComM或BswM组件,ComM或BswM组件依据CanSM传来的当前通信模式来对IPDU组或NM进行开启关闭和切换,如果PN功能有用,也要将该状态通知给CanNM。
CanSM是CAN网络状态管理器,ECU可能存在多路CAN,CanSM为ECU的每路CAN进行管理即该CAN网络能不能发送报文、接收报文、BUSOFF处理、ECU的CAN波特率切换、ECU的唤醒功能管理等,通过接收ComM的请求或者接口被调用,然后CanSM再调用CanIf组件,对CAN控制器或CAN收发器进行状态切换,切换完后将状态通知给ComM或BswM组件,ComM或BswM组件依据CanSM传来的当前通信模式来对IPDU组或NM进行开启关闭和切换,如果PN功能有用,也要将该状态通知给CanNM。
二、CanSM与其他组件的依赖关系
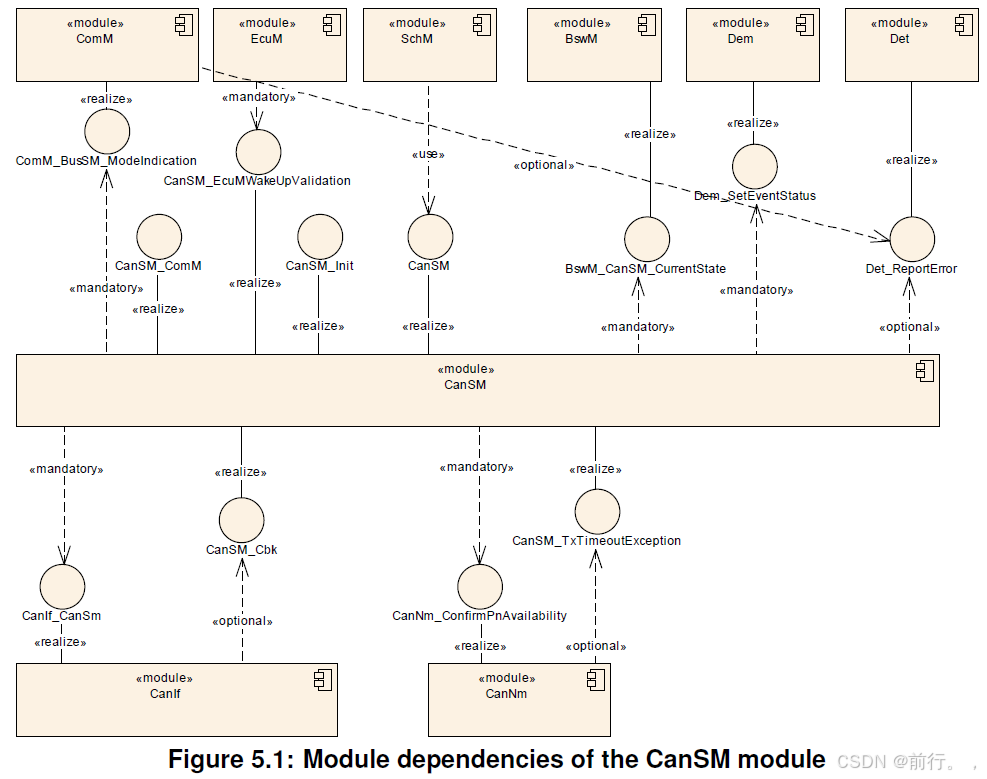 从图上看到,CanSM与其他组件的依赖关系:
从图上看到,CanSM与其他组件的依赖关系:
(一)、EcuM
EcuM组件负责对CanSM进行初始化,并与CanSM组件交互进行CAN的唤醒验证。
(二)、Os(SchM或Rte一部分)
Os任务或其他调度器负责调用CanSM组件的主循环函数,即CanSM_MainFunction()。
(三)、ComM
ComM调用CanSM的接口来请求改变CAN网络的通信模式并且CanSM将CAN网络的当前通信模式通知ComM组件。
(四)、CanIf
CanSM调用CanIf的接口来控制CAN控制器和CAN收发器的工作模式并且CanIf将CAN控制器和CAN收发器的事件通知给CanSM。
(五)、Dem
CanSM向Dem组件报告CAN总线一些特定的产生错误。
(六)、BswM
CanSM需要向BswM组件通知CAN总线特定模式的更改。
(七)、CanNm
CanSM需要向CanNm通知部分网络可用性,并且处理部分网络下的CanNm超时异常通知。
(八)、Det
CanSM组件向Det组件报告开发中和运行中的错误。
三、ECU online active / passive
当调用CanSM_SetEcuPassive()入参CanSM_Passive为TRUE时,CanSM应将模式为CANIF_ONLINE的CAN通道切换为CANIF_TX_OFFLINE_ACTIVE,通过调用CanIf_SetPduMode()来执行。
当调用CanSM_SetEcuPassive()入参CanSM_Passive为FALSE时,CanSM应将模式为CANIF_TX_OFFLINE_ACTIVE的CAN通道切换为CANIF_ONLINE,通过调用CanIf_SetPduMode()来执行。
CanSM_SetEcuPassive()通常被ComM调用,场景为BswM或Dcm需要关闭CAN通信或降低总线负载时调用。
四、CanSM状态机
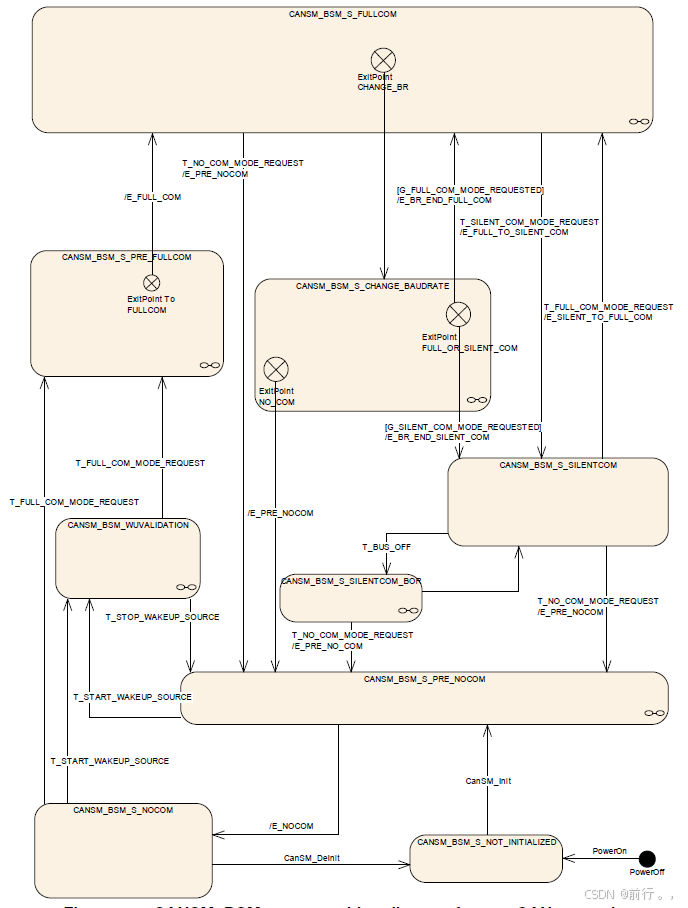
如上图,是CanSM维护的单个CAN网络的状态机。
CanSM需要存储每个已配置了的CAN网络模式。
CanSM存储的通信模式有COMM_NO_COMMUNICATION、COMM_SILENT_COMMUNICATION、COMM_FULL_COMMUNICATION。
CanSM状态机应该在主循环里进行切换操作。
如果CanSM状态机处于CANSM_BSM_S_NOT_INITIALIZED下则拒绝ComM的网络请求。
如果CanSM调用CanIf_SetControllerMode()、CanIf_SetTrcvMode()、CanIf_ClearTrcvWufFlag()、CanIf_CheckTrcvWakeFlag()没有返回OK或者它们没有回调CanSM_ControllerModeIndication()、CanSM_TransceiverModeIndication()、CanSM_ClearTrcvWufFlagIndication()、CanSM_CheckTransceiverWakeFlagIndication()这些指示函数,次数超过了CanSMModeRequestReptitionMax那就向Det报告CANSM_E_MODE_REQUEST_TIMEOUT。
如果CanIf通过回调函数CanSM_ConfirmPnAvailability()告诉CanSM已经开启了CAN收发器的PN功能,CanSM需要调用CanNm_ConfirmPnAvailability()通知CanNm。
如果CanIf通过回调函数CanSM_ConfirmCtrlPnAvailability()告诉CanSM已经开启了CAN收发器的PN功能,CanSM需要调用CanNm_ConfirmPnAvailability()通知CanNm。
如果没有用到CanTrcv,则CanSM应该不调用CanIf_SetTrcvMode()。
CanSM应该存储每个CAN网络的请求配置,如果CanSM_RequestComMode()被成功调用。
CanSM应在每次成功更改CAN控制器模式后或触发BUSOFF后更改为CAN_CS_STOPPED后存储每个CAN控制器的内部模式。
(一)、状态机转化说明
1、Trigger
Trigger为每个状态机的触发条件。
(1)、PowerOn
上电后CanSM状态机应该为CANSM_BSM_NOT_INITIALIZED。
(2)、CanSM_Init
调用CanSM_Init()后CanSM状态机从CANSM_BSM_NOT_INITIALIZED切换为CANSM_BSM_S_PRE_NOCOM。
(3)、CanSM_DeInit
调用CanSM_DeInit()后CanSM状态机进入CANSM_BSM_NOT_INITIALIZED,此函数应该在CANSM_BSM_S_NOCOM下调用。
(4)、T_START_WAKEUP_SOURCE
CanSM状态机处于CANSM_BSM_S_PRE_NOCOM或者CANSM_BSM_S_NOCOM下时调用CanSM_StartWakeUpSource()开始唤醒源检测并且返回OK,CanSM状态切换为CANSM_BSM_WUVALIDATION。
该触发通常在ECU唤醒后由EcuM调用CanSM_StartWakeUpSource()进行触发或者进入NO_COM时检测到有唤醒标志则触发该动作。
(5)、T_STOP_WAKEUP_SOURCE
CanSM状态机处于CANSM_BSM_WUVALIDATION状态时,调用CanSM_StopWakeUpSource()停止唤醒源检测并且返回OK,CanSM状态切换为CANSM_BSM_S_PRE_NOCOM。
该触发通常在ECU唤醒后由EcuM调用CanSM_StartWakeUpSource()进行CAN收发器和CAN控制器的唤醒源检测,如果没有唤醒源则调用CanSM_StopWakeUpSource()。
(6)、T_FULL_COM_MODE_REQUEST
CanSM状态机处于CANSM_BSM_WUVALIDATION或CANSM_BSM_S_NOCOM下时调用CanSM_RequestComMode()并且入参为COMM_FULL_COMMUNICATION模式时,则CanSM状态机切换为CANSM_BSM_S_PRE_FULLCOM,或者CanSM状态机处于CANSM_BSM_S_SILENTCOM时使用COMM_FULL_COMMUNICATION模式切换为CANSM_BSM_S_FULLCOM。
该触发通常为应用层调用ComM_RequestComMode()请求进入FULL_COM模式,ComM再调用CanSM_RequestComMode()。
(7)、T_SILENT_COM_MODE_REQUEST
CanSM状态机处于CANSM_BSM_S_FULLCOM时,调用CanSM_RequestComMode()并且入参为COMM_SILENT_COMMUNICATION,则CanSM状态机切换为CANSM_BSM_S_SILENTCOM。
(8)、T_NO_COM_MODE_REQUEST
CanSM状态机处于CANSM_BSM_S_FULLCOM、CANSM_BSM_S_SILENTCOM、CANSM_BSM_S_SILENTCOM_BOR时,调用CanSM_RequestComMode()并且入参为COMM_NO_COMMUNICATION,则CanSM状态机切换为CANSM_BSM_S_PRE_NOCOM。
通常由应用层执行休眠流程时调用ComM_RequestComMode()进行触发。
(9)、T_BUS_OFF
CanSM状态机处于CANSM_BSM_S_SILENTCOM时,如果发生BUSOFF,在CAN BUSOFF中断里会调用CanSM_ControllerBusOff()就触发了T_BUS_OFF,状态机就切换到了CANSM_BSM_S_SILENTCOM_BOR。
2、Guarding condition
Guarding condition为每个状态机转化时的前置条件。
(1)、G_FULL_COM_MODE_REQUESTED
调用CanSM_RequestComMode()的模式请求是否为COMM_FULL_COMMUNICATION。
(2)、G_SILENT_COM_MODE_REQUESTED
调用CanSM_RequestComMode()的模式请求是否为COMM_SILENT_COMMUNICATION。
3、Effect
Effect为状态转换或特定事件发生时执行的动作或操作。
(1)、E_PRE_NOCOM
CanSM状态机处于CANSM_BSM_S_FULLCOM、CANSM_BSM_S_SILENTCOM、CANSM_BSM_S_SILENTCOM_BOR时,满足T_NO_COM_MODE_REQUEST则切换到CANSM_BSM_S_PRE_NOCOM状态机并且BswM_CanSM_CurrentState()被调用,入参CurrentState为CANSM_BSWM_NO_COMMUNICATION。
(2)、E_NOCOM
CanSM状态机处于CANSM_BSM_S_PRE_NOCOM状态切换到CANSM_BSM_S_NOCOM状态时,E_NOCOM作用是将所寻址的CAN网络的内部存储网络模式更改为COMM_NO_COMMUNICATION,如果该请求模式已存在,则调用ComM_BusSM_ModeIndication(),入参为E_NOCOM。
(3)、E_FULL_COM
CanSM状态机处于CANSM_BSM_S_PRE_FULLCOM状态切换到CANSM_BSM_S_FULLCOM状态时,有以下Effect:
1、如果ECU passive为FALSE,则CanIf_SetPduMode()被调用,入参PduModeRequest为CANIF_TX_OFFLINE_ACTIVE。
2、如果ECU passive为TRUE,则CanIf_SetPduMode()被调用,入参PduModeRequest为CANIF_ONLINE。
3、CanSM将调用ComM_BusSM_ModeIndication()入参ComMode为COMM_FULL_COMMUNICATION。
4、CanSM将调用BswM_CanSM_CurrentState()入参CurrentState为CANSM_BSWM_FULL_COMMUNICATION。
(4)、E_FULL_TO_SILENT_COM
CanSM状态机处于CANSM_BSM_S_FULLCOM状态切换到CANSM_BSM_S_SILENTCOM状态时,有以下Effect:
1、CanSM将调用BswM_CanSM_CurrentState()入参CurrentState为CANSM_BSWM_SILENT_COMMUNICATION。
2、CanSM将调用CanIf_SetPduMode()入参PduModeRequest为CANIF_TX_OFFLINE。
3、CanSM将调用ComM_BusSM_ModeIndication()入参ComMode为COMM_SILENT_COMMUNICATION。
(5)、E_BR_END_FULL_COM
CanSM状态机处于CANSM_BSM_S_CHANGE_BAUDRATE状态切换到CANSM_BSM_S_FULLCOM状态时,产生的效果与E_FULL_COM一样。
(6)、E_BR_END_SILENT_COM
CanSM状态机处于CANSM_BSM_S_CHANGE_BAUDRATE状态切换到CANSM_BSM_S_SILENTCOM状态时,产生的效果与E_FULL_TO_SILENT_COM一样。
(7)、E_SILENT_TO_FULL_COM
CanSM状态机处于CANSM_BSM_S_SILENTCOM状态切换到CANSM_BSM_S_FULLCOM状态时,产生的效果与E_FULL_COM一样。
(二)、Sub state machine CANSM_BSM_WUVALIDATION
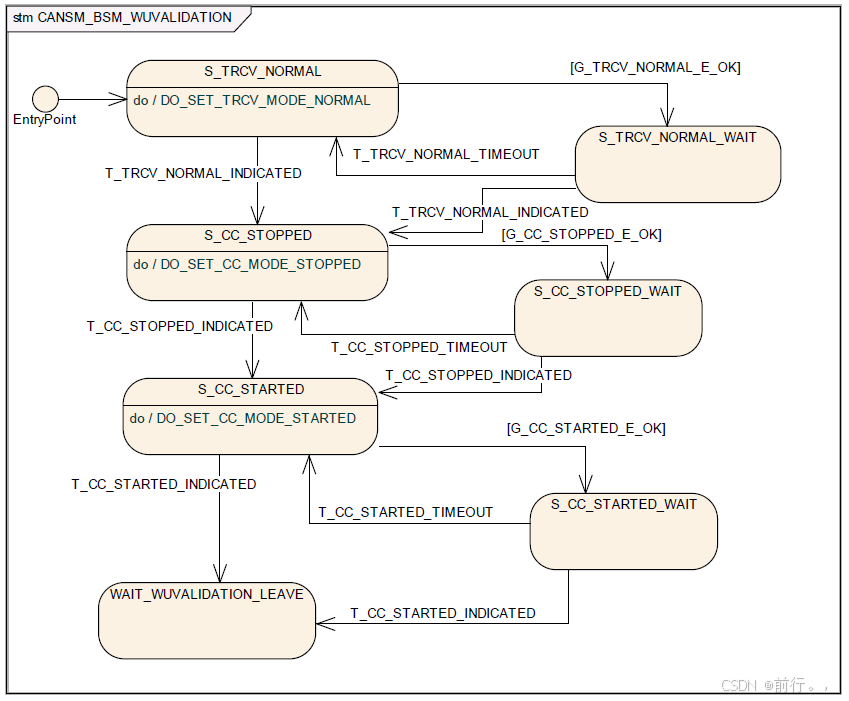
CanSM状态机处于CANSM_BSM_S_PRE_NOCOM或者CANSM_BSM_S_NOCOM下时EcuM调用CanSM_StartWakeUpSource()进入CANSM_BSM_WUVALIDATION状态机进行开启CAN控制器和CAN收发器(通常是ECU唤醒后EcuM调用触发),开启后EcuM如果没有检测到CAN的唤醒源或者超时则调用CanSM_StopWakeUpSource()后切换到CANSM_BSM_S_PRE_NOCOM状态机。该状态下需要设置CAN控制器和CAN收发器的状态。
CANSM_BSM_WUVALIDATION状态下CanSM先调用CanIf_SetTrcvMode()将CanTrcv设置为NORMAL模式,如果在等待期间超时后(CANSM_MODEREQ_REPEAT_TIME)继续设置,通常还会有个重复设置次数,如果超过该次数则退出该模式,设置成功后收到CanIf调用CanSM_TransceiverModeIndication()通知CanSM收发器模式设置成功。
接着CanSM调用CanIf_SetControllerMode()将控制器设置为STOPPED模式,设置成功后CanIf调用CanSM_ControllerModeIndication()通知CanSM控制器模式设置成功。超时机制同上段同理。
最后将CAN控制器设置为STARTED模式。
有唤醒源后退出CANSM_BSM_WUVALIDATION状态机应用层会调用ComM的接口请求进入FULL_COM模式,ComM会调用CanSM_RequestComMode()模式为FULL_COM请求CanSM进入CANSM_BSM_S_PRE_FULLCOM状态机。
(三)、Sub state machine CANSM_BSM_S_PRE_NOCOM
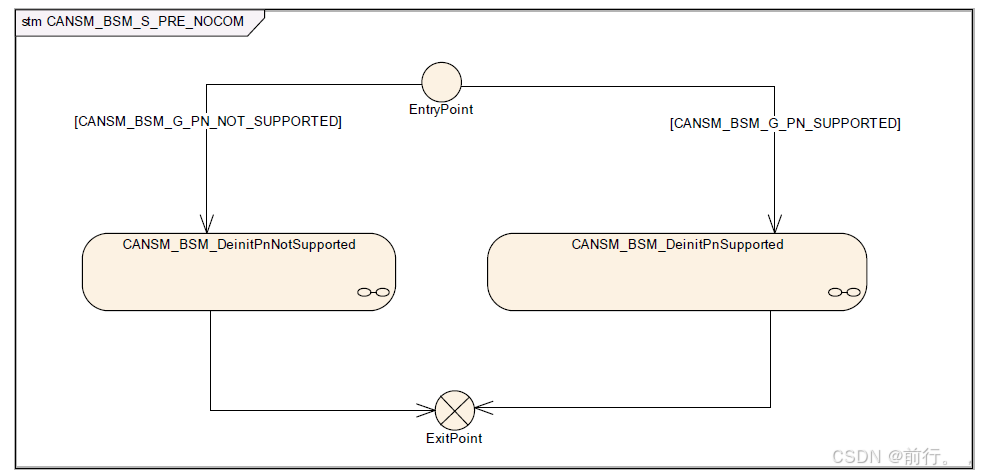 当ComM调用CanSM_RequestComMode()请求进入NO_COM模式或CanSM_Init执行后进入CANSM_BSM_S_PRE_NOCOM状态机,该状态机下对CAN控制器和CAN收发器设置为不通信模式。
当ComM调用CanSM_RequestComMode()请求进入NO_COM模式或CanSM_Init执行后进入CANSM_BSM_S_PRE_NOCOM状态机,该状态机下对CAN控制器和CAN收发器设置为不通信模式。
当CanTrcvPnEnabled为FALSE,进入CANSM_BSM_DeinitPnNotSupported子状态,否则进入CANSM_BSM_DeinitPnSupported子状态。
1、CANSM_BSM_DeinitPnSupported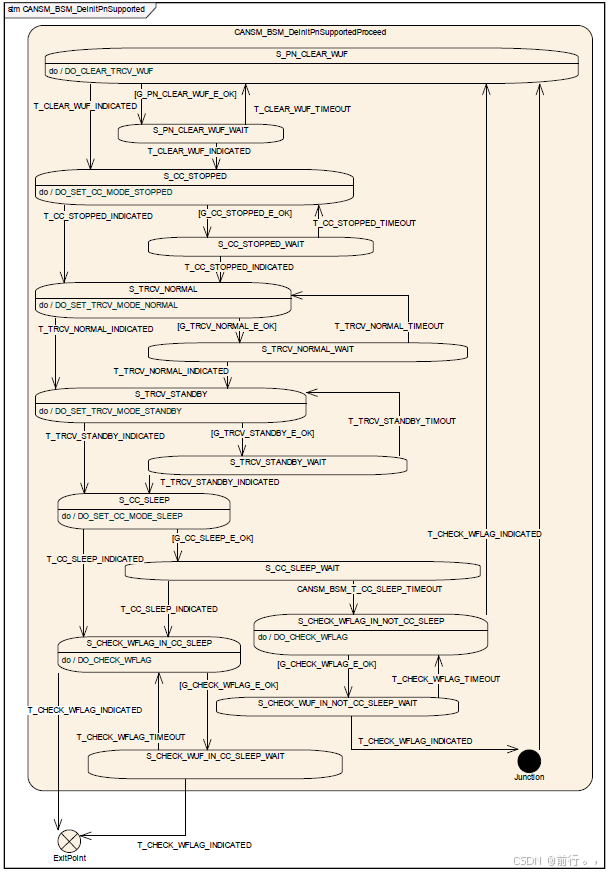
进入该状态机后CanSM会调用CanIf_ClrTrcvWufFlag()清除CAN收发器的唤醒标志,若清除成功CanIf会调用CanSM_ClearTrcvWufFlagIndication()通知CanSM清除成功。
接着CanSM调用CanIf_SetControllerMode()将CAN控制器设置为STOPPED,若设置成功CanIf会调用CanSM_ControllerModeIndication()通知CanSM设置成功。
接着CanSM调用CanIf_SetTrcvMode()将CAN收发器设置为NORMAL,若设置成功CanIf会调用CanSM_TransceiverModeIndication()通知CanSM设置成功。
接着CanSM调用CanIf_SetTrcvMode()将CAN收发器设置为STANDBY,若设置成功CanIf会调用CanSM_TransceiverModeIndication()通知CanSM设置成功。
接着CanSM调用CanIf_SetControllerMode()将CAN控制器设置为SLEEP,若设置成功CanIf会调用CanSM_ControllerModeIndication()通知CanSM设置成功。
CAN控制器进入SLEEP成功后CanSM调用CanIf_CheckTrcvWufFlag()查询CAN收发器是否有唤醒标志,检测完后CanIf调用CanSM_CheckTrcvWufFlagIndication()通知CanSM,结束本状态机,退出后如果有唤醒标志存在则进入CANSM_BSM_WUVALIDATION状态机。
如果CAN控制器进入SLEEP超时,则调用CanIf_CheckTrcvWufFlag()查询CAN收发器是否有唤醒标志,检测完后CanIf调用CanSM_CheckTrcvWufFlagIndication()通知CanSM,本状态机又回到S_PN_CLEAR_WUF阶段清除收发器的唤醒标志再进入SLEEP流程。
该状态机内的切换都有CANSM_MODEREQ_REPEAT_TIME超时时间,超时后重新执行上一个流程,若超过若干次数则退出本状态机。
2、CANSM_BSM_DeinitPnNotSupported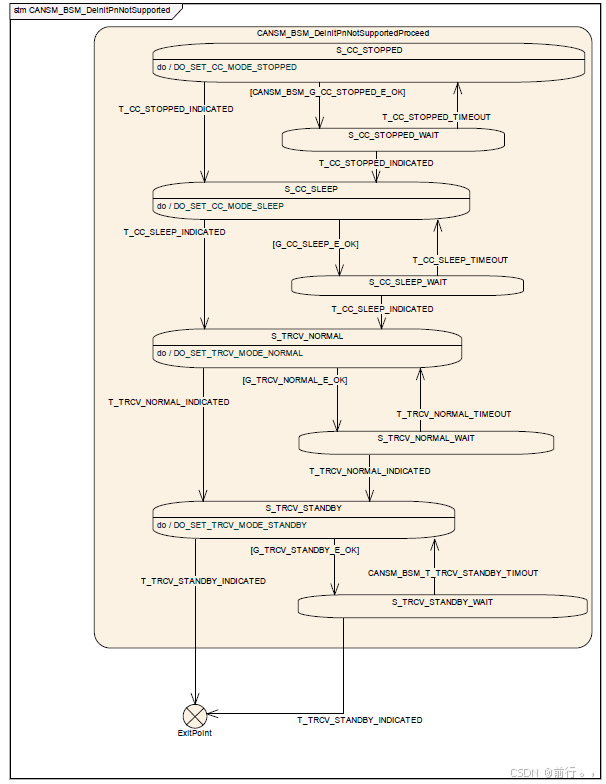
该状态机与CANSM_BSM_DeinitPnSupported相比不需要执行CAN收发器的唤醒标志清除动作,其他都一样。
CANSM_BSM_S_PRE_NOCOM状态机执行完后进入CANSM_BSM_S_NOCOM状态机,如果上层没调用CanSM_StartWakeUpSource()的话。
(四)、Sub state machine CANSM_BSM_S_SILENTCOM_BOR
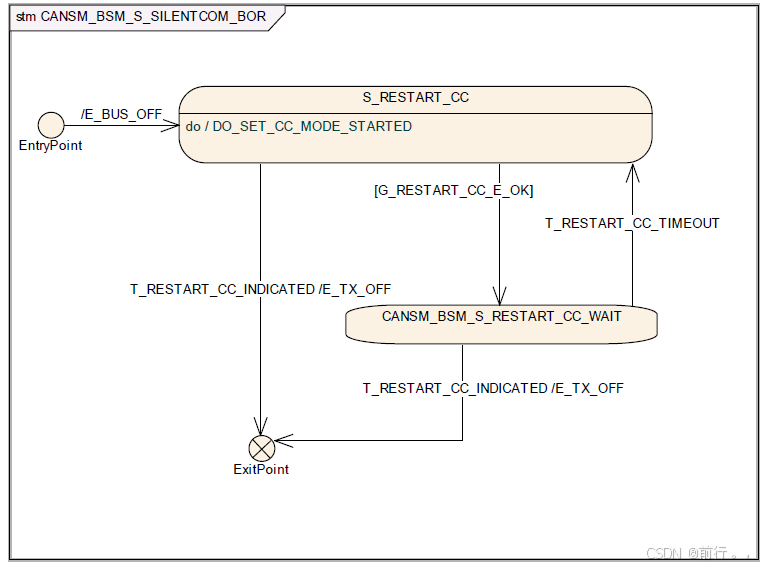
在处于FULL_COM时如果调用ComM的请求为SILENT_COM,则会切到CANSM_BSM_S_SILENTCOM状态机,在CANSM_BSM_S_SILENTCOM状态机时CAN控制器处于TX_OFFLINE模式,数据禁止由CAN驱动发出去,这时候如果CAN邮箱里有正在要发送的数据可能会产生BUSOFF,就进入了CANSM_BSM_S_SILENTCOM_BOR状态机。
进入该状态机后CanSM需要调用Dem_SetEventStatus()通知Dem,EventId为CANSM_E_BUS_OFF。
产生BUSOFF时BUSOFF中断里可能会调用CanIf_SetControllerMode()将控制器设置为STOP模式,然后调用CanIf_ControllerBusOff()通知CanIf,CanIf再调用CanSM_ControllerBusOff()通知CanSM,CanSM再调用CanIf_SetControllerMode()将控制器设置为STARTED模式。
设置成功后CanIf会调用CanSM_ControllerModeIndication()通知CanSM,接着退出该状态机,返回到CANSM_BSM_S_SILENTCOM,如果在CANSM_MODEREQ_REPEAT_TIME内没有收到Indication则重新设置控制器。
退出该状态机后如果ComM的请求为NO_COM则进入CANSM_BSM_S_PRE_NOCOM状态机。
(五)、Sub state machine CANSM_BSM_S_PRE_FULLCOM
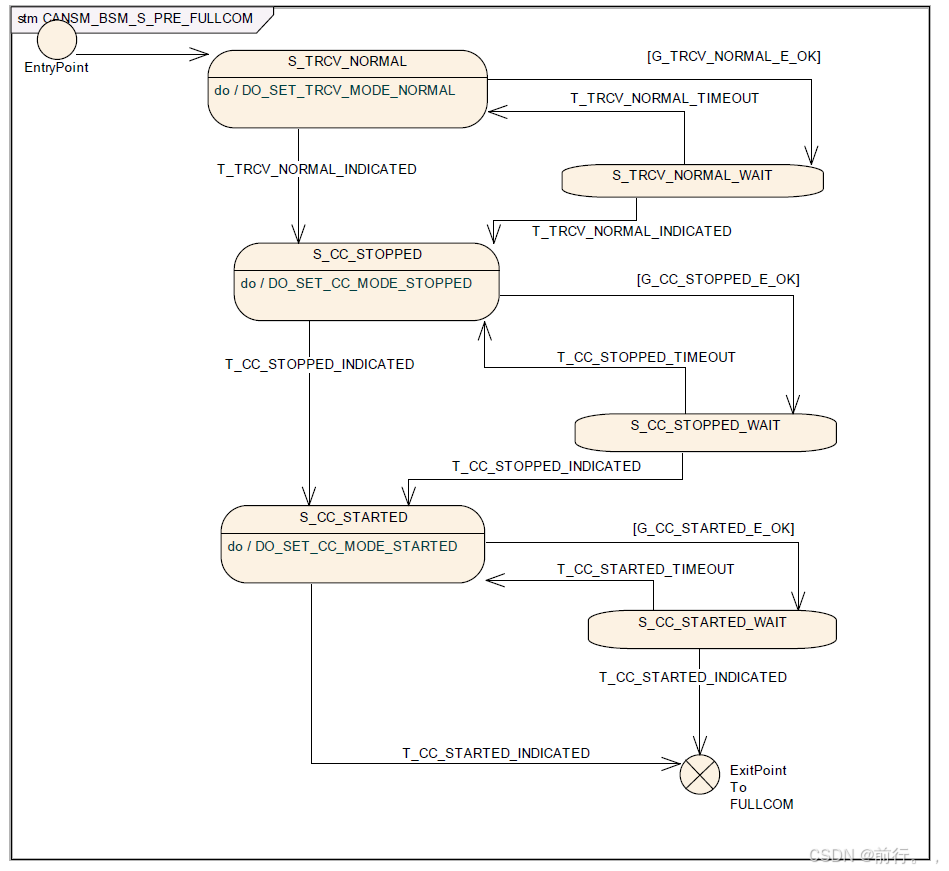 CANSM_BSM_S_PRE_FULLCOM状态机由CANSM_BSM_WUVALIDATION或CANSM_BSM_S_NOCOM状态机下经过应用层调用ComM_RequestComMode()请求FULL_COM触发进入,该状态机设置CAN控制器和收发器为正常通信模式。
CANSM_BSM_S_PRE_FULLCOM状态机由CANSM_BSM_WUVALIDATION或CANSM_BSM_S_NOCOM状态机下经过应用层调用ComM_RequestComMode()请求FULL_COM触发进入,该状态机设置CAN控制器和收发器为正常通信模式。
首先CanSM调用CanIf_SetTrcvMode()将CAN收发器设置为NORMAL模式,成功后收到CanIf的通知,接着再调用CanIf_SetControllerMode()将CAN控制器设置为STOPPED模式,成功后收到CanIf的通知,再将CAN控制器设置为STARTED模式,最后退出该状态机进入到CANSM_BSM_S_FULLCOM状态机并且执行E_FULL_COM动作。
其中任一状态机有超时重试机制。
(六)、Sub state machine CANSM_BSM_S_FULLCOM
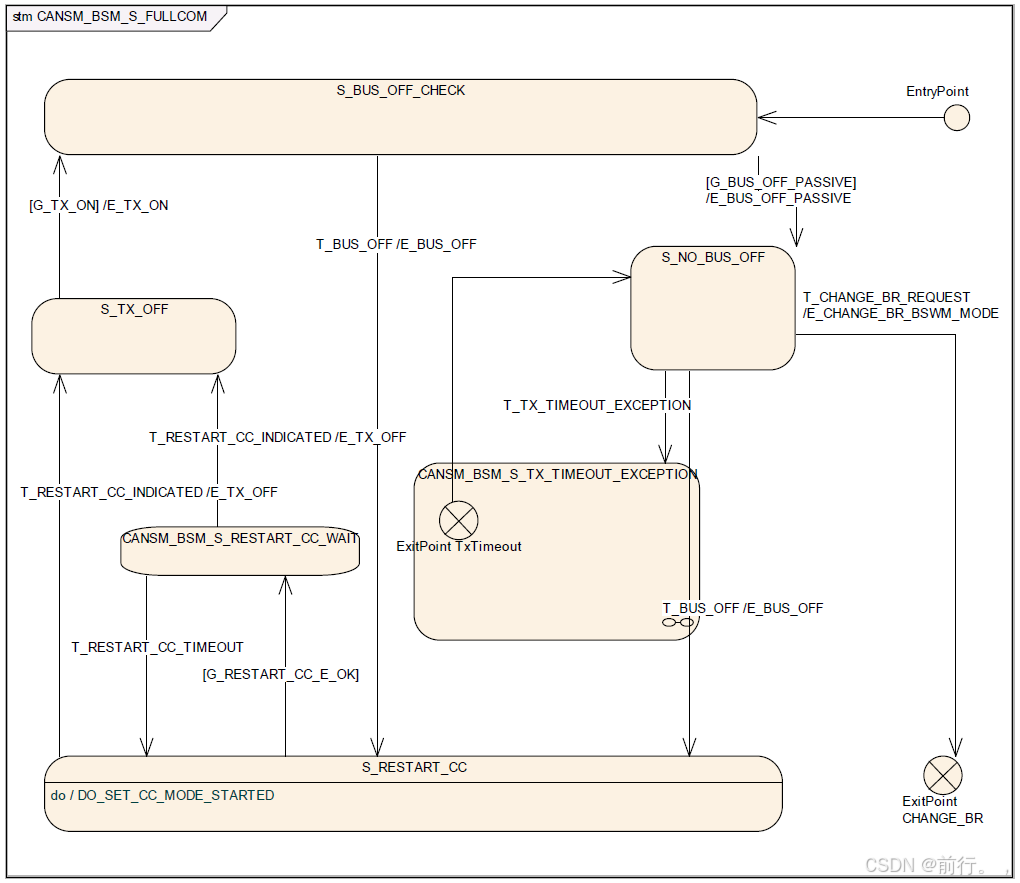 在该状态机下CAN能正常收发通信。
在该状态机下CAN能正常收发通信。
如果之前没发生过BUSOFF会进入S_NO_BUS_OFF状态,期间如果上层调用CanSM_ChangeBaudrate()则退出CANSM_BSM_S_FULLCOM进入CANSM_BSM_S_CHANGE_BAUDRATE状态机并且调用BswM_CanSM_CurrentState()通知BswM入参为CANSM_BSWM_CHANGE_BAUDRATE,CanSM_ChangeBaudrate()只有在没有发生BUSOFF和FULLCOM的情况下调用。
期间如果ECU发生BUSOFF,CanIf调用CanSM_ControllerBusOff()通知CanSM进入了BUSOFF,CanSM需要对相应的CAN控制器进行BUSOFF恢复动作,如果ECU有多个CAN控制器在同一个网络内,有一个CAN控制器发生BUSOFF,那么ECU应该对其他CAN控制器也进行恢复动作。BUSOFF发生后CanSM需要调用BswM_CanSM_CurrentState()入参为CANSM_BSWM_BUS_OFF和ComM_BusSM_ModeIndication()入参为COMM_SILENT_COMMUNICATION通知BswM和ComM做相应的处理,并且调用Dem_SetEventStatus()入参为CANSM_E_BUS_OFF。
发生BUSOFF代表ECU不能发出数据了,一般会进入CAN错误中断,在CAN错误中断会调用CanIf_SetControllerMode()入参为CAN_CS_STOP对CAN控制器进行停止。
发生BUSOFF后会进入S_RESTART_CC状态机,调用CanIf_SetControllerMode()入参为CAN_CS_STARTED对CAN控制器进行开启操作(相当于CAN控制器重启),若切换成功CanIf调用CanSM_ControllerModeIndication()通知切换成功,否则超时时间到了后继续尝试开启CAN控制器。
CAN控制器开启成功后应该调用CanIf_SetPduMode()将控制器模式设置为CANIF_TX_OFFLINE,即允许接收不允许发送。
如果CanSMEnableBusOffDelay为FALSE,会在CanSMBorTimeL1或CanSMBorTimeL2时间到了后切换到S_BUS_OFF_CHECK状态机,即快慢恢复,否则该延时时间自定义,可以通过CALLOUT函数CanSMGetBusOffDelayFunction。
延时时间到了后如果之前的模式为Passive,则要调用CanIf_SetPduMode()将控制器设置为CANIF_ONLINE否则为CANIF_TX_OFFLINE_ACTIVE。接着调用BswM_CanSM_CurrentState()入参为CANSM_BSWM_FULL_COMMUNICATION和ComM_BusSM_ModeIndication()入参为COMM_FULL_COMMUNICATION。
在S_BUS_OFF_CHECK状态机下如果还发生BUSOFF即触发CAN错误中断,则又切换到S_RESTART_CC。
如果CANSM_BOR_TX_CONFIRMATION_POLLING为disabled,在CANSM_BOR_TIME_TX_ENSURED时间到了都没发生BUSOFF也就是触发CAN错误中断,那就切换到S_NO_BUS_OFF状态机,否则直到调用CanIf_GetTxConfirmationState()返回CANIF_TX_RX_NOTIFICATION为止。切换回S_NO_BUS_OFF说明BUSOFF恢复成功,调用Dem_SetEventStatus()将CANSM_E_BUS_OFF设置为DEM_EVENT_STATUS_PASSED。
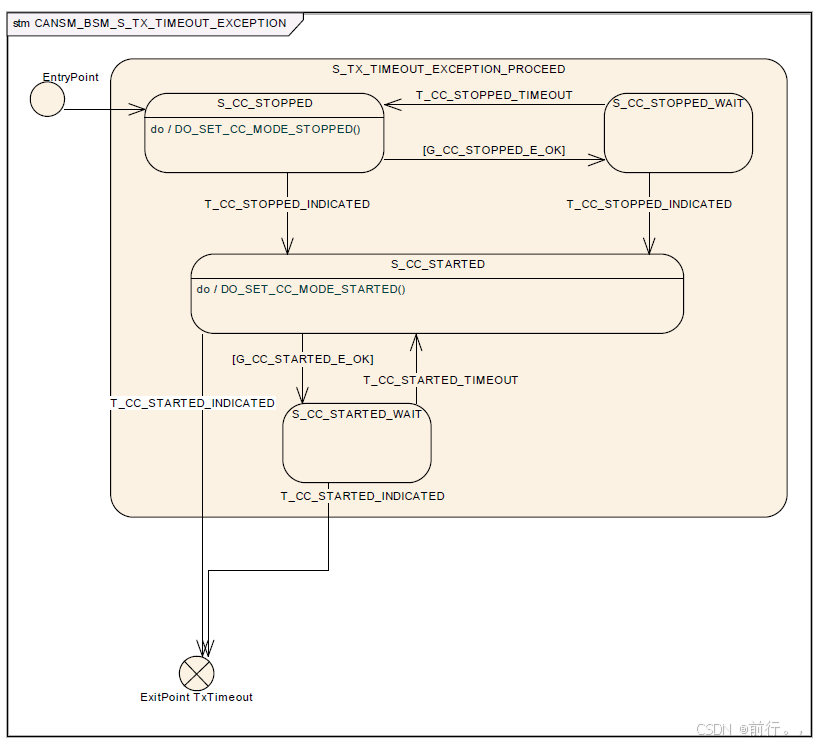
在S_NO_BUS_OFF状态机下如果发生T_TX_TIMEOUT_EXCEPTION即CanNm的NM发送超时会调用CanSM_TxTimeoutException()通知CanSM,CanSM先调用CanIf_SetControllerMode()设置为CAN_CS_STOP,再设置为CAN_CS_STARTED,设置成功后调用CanIf_SetPduMode()将控制器设置为CANIF_ONLINE,回到S_NO_BUS_OFF。
(七)、Sub state machine CANSM_BSM_S_CHANGE_BAUDRATE
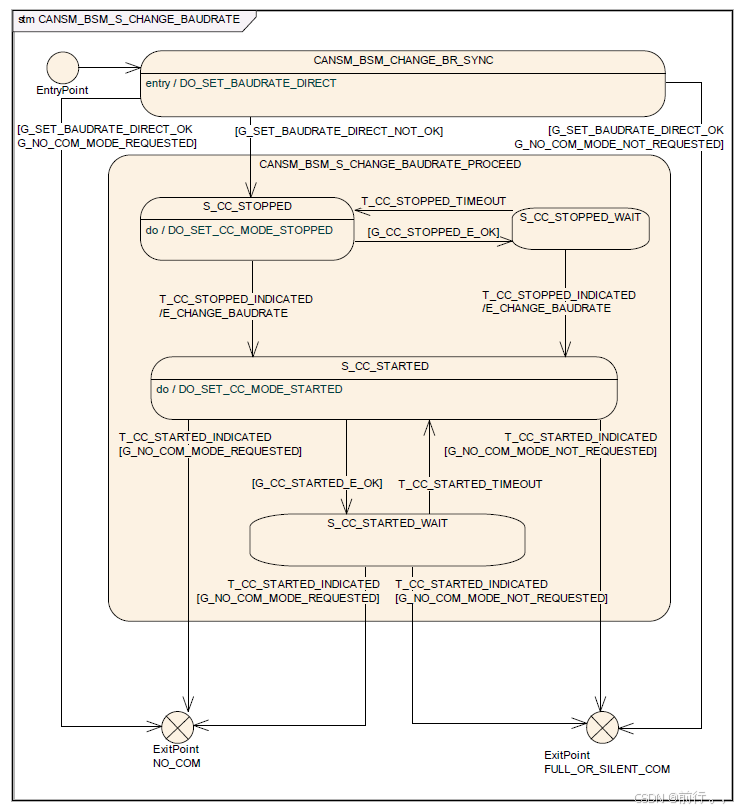
在FULL_COM下并且没有BUSOFF的话上层调用CanSM_ChangeBaudrate()会进入CANSM_BSM_S_CHANGE_BAUDRATE状态机。
进入该状态机后CanSM会调用CanIf_SetBaudrate()设置CAN控制器波特率,如果返回NOT_OK,会先调用CanIf_SetControllerMode()将CAN控制器设置为STOP,超时则重新设置,若设置成功则调用ComM_BusSM_ModeIndication()入参为COMM_NO_COMMUNICATION通知ComM,再调用CanIf_SetBaudrate()重新设置波特率,接着再调用CanIf_SetControllerMode()将CAN控制器设置为START。
CanSM_ChangeBaudrate()返回OK后如果上一次的ComM_Mode为COMM_NO_COMMUNICATION则退出该状态机进入CANSM_BSM_S_PRE_NOCOM状态机,否则退出进入CANSM_BSM_S_SILENTCOM或CANSM_BSM_S_FULLCOM状态机。
五、BUSOFF快慢恢复
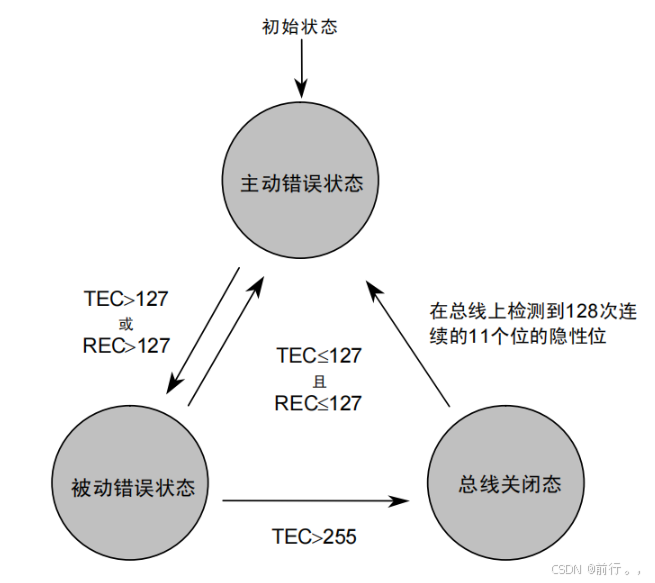
BUSOFF产生原因一般为CAN总线电平变化有短路或断路或阻抗匹配不对或其他,或ECU本身波特率不对或报文发送失败。
REC或TEC累加一次后会进入主动错误状态,REC是收到总线上其他ECU发的错误帧后会累加,TEC是ECU本身检测到发送错误会累加,REC或TEC累加到大于127个会进入被动错误状态,主动错误状态ECU会发主动错误帧,被动错误状态会发被动错误帧,在被动错误状态下TEC会继续累加而REC不会,若ECU没接收到错误帧或发送成功,REC或TEC会减小。
当TEC累加到大于255后ECU便触发CAN错误中断进入BUSOFF处理流程,BUSOFF处理中进行CAN控制器的重启,若检测到总线上有128此连续的11个BIT的隐形位便认为BUSOFF恢复MCU不会再进入CAN错误中断,TEC和REC清零,如使用500Kbps的经典CAN帧,1 bit = 2µs,故障节点重新参与通信的最快时间 = 128 *11 * 2 = 2816µs = 2.816ms。
触发CAN错误中断后,软件会先关闭CAN控制器,应用层停止收发报文,为了防止影响总线上的其他节点,然后再开启CAN控制器,应用层只允许接收报文不允许发送报文,接着快恢复时间到,允许应用层发送报文,若在Bor Time Tx Ensured时间内没发生CAN错误中断软件里则认为恢复成功,否则BUSOFF次数加1,次数大于Bor Counter L1 To L2后,恢复时间改为慢恢复时间,这是为了防止ECU的CAN控制器重启次数过于频繁影响CAN总线,快恢复和慢恢复参数分别为Bor Time L1和Bor Time L2.
BUSOFF在恢复期间,如果上层不主动请求释放网络,NM状态不会切换到RSS,还会停留在NOS。
产生BUSOFF后ECU应该停止监测其他节点的应用报文,在这期间就算没收到其他节点的应用报文也不应该记录通信丢失DTC。
六、主要代码和参数描述
(一)、Std_ReturnType CanSM_RequestComMode( NetworkHandleType CanSM_NetworkHandle, ComM_ModeType CanSM_RequestedComMMode )
被ComM调用,收到对应的请求模式时CanSM切换状态机改变CAN控制器和CAN收发器的模式。
(二)、Std_ReturnType CanSM_StartWakeupSources( NetworkHandleType CanSM_NetworkHandle )
被EcuM调用,执行唤醒检测流程时被调用,CanSM会将CAN控制器和CAN收发器设置为STARTED和NORMAL。
(三)、void CanSM_ControllerBusOff( uint8 CanSM_ControllerId )
回调函数,当触发BUSOFF中断时被调用,用来通知CanSM有BUSOFF事件。
(四)、
void CanSM_ConfirmPnAvailability( uint8 CanSM_TransceiverId )
void CanSM_ConfirmCtrlPnAvailability( uint8 ControllerId )
回调函数,当CAN收发器和CAN控制器PN功能使能,CanIf会分别调用这两个函数通知CanSM PN功能启用了,这两个函数里CanSM又会调用CanNm_ConfirmPnAvailability()通知CanNm。
这两个函数被调用的场景比如CanTrcv PN功能宏定义开启后,说明ECU本身需要PN功能,收发器通常选的特定帧唤醒的,当ECU休眠后被唤醒,说明是特定帧唤醒的,唤醒后CanSM里会调用CanIf设置收发器模式,在设置的过程中,CanTrcv发现有POR标志即上电唤醒,便调用CanSM_ConfirmPnAvailability()。
(五)、void CanSM_TxTimeoutException( NetworkHandleType Channel )
回调函数,当CanNm发现NM PDU发送超时时,调用该函数进入TX_TIMEOUT_EXCEPTION状态机,对CAN控制器进行重启操作。
七、DaVinci Configurator主要配置
(一)、CanSMGeneral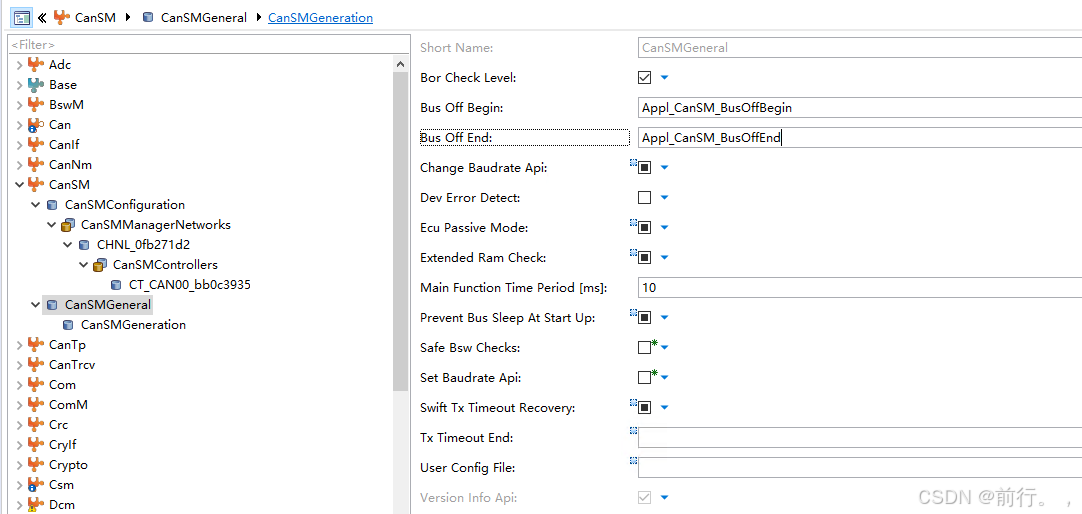 CanSM的通用配置,这里可以添加BUSOFF开始前后的CALLOUT函数用来自定义处理BUSOFF、是否开启波特率设置函数、是否开启被动模式的设置函数等。
CanSM的通用配置,这里可以添加BUSOFF开始前后的CALLOUT函数用来自定义处理BUSOFF、是否开启波特率设置函数、是否开启被动模式的设置函数等。
如果有用到J1939Nm需要配合BUSOFF开始前后CALLOUT使用。
(二)、CanSMConfiguration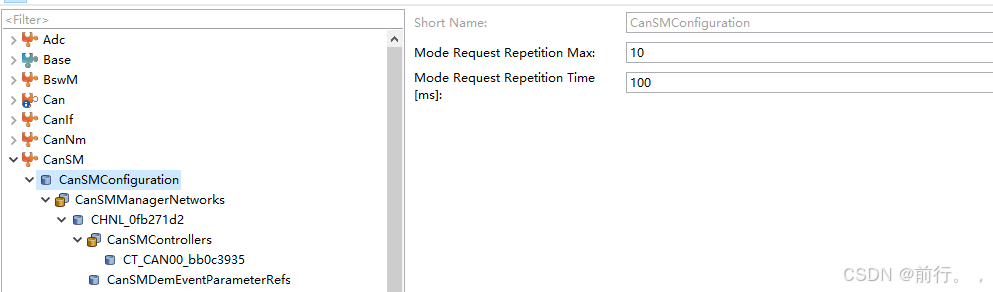 这里添加控制器模式切换的超时时间和最大次数。
这里添加控制器模式切换的超时时间和最大次数。
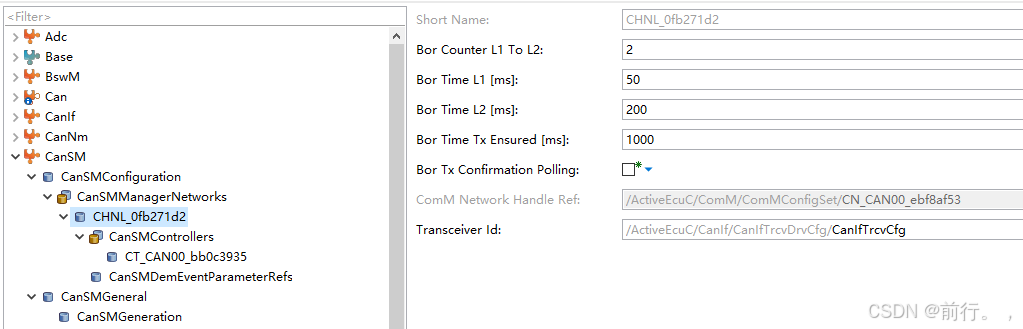 这里设置快慢恢复的参数。
这里设置快慢恢复的参数。
Bor Counter L1 To L2:
如果BUSOFF发生次数小于该数,则BUSOFF恢复参数使用Bor Time L1,否则使用Bor Time L2。
Bor Time L1:
快恢复参数。
Bor Time L2:
慢恢复参数。
Bor Time Tx Ensured:
确认BUSOFF恢复的时间,该时间内都没发生BUSOFF,则退出恢复流程,认为已经恢复了。
Bor Tx Confirmation Polling:
使能后,确认BUSOFF恢复的动作不使用Bor Time Tx Ensured参数而使用CanIf_GetTxConfirmationState()来确认。
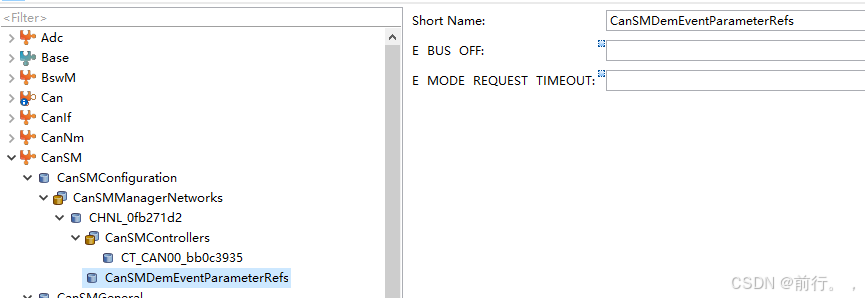
定义发生BUSOFF时向Dem报错的DTC。
八、使用范例
无。
九、参考资料
AUTOSAR_CP_SWS_CANInterface
AUTOSAR_CP_SWS_CANStateManager
AUTOSAR_EXP_LayeredSoftwareArchitecture
AUTOSAR_CP_SWS_CANTransceiverDriver
AUTOSAR_CP_SWS_COMManager
TechnicalReference_CanSM
AUTOSAR_CP_SWS_CANNetworkManagement
AUTOSAR_CP_SWS_BSWModeManager
ISO7498
ISO11898
ISO11519
ISO15765
ISO14229
can2.0
can_fd_spec
总结
CanSM接收来自ComM的请求对CAN控制器和CAN收发器进行模式切换,复杂的状态机切换CanSM都自己实现了,其他组件不需要关心状态机的切换。
CanSM里为什么在切换控制器时都要先切到STOP再切到STARTED或SLEEP,是因为CanDrv里规定了如此流程: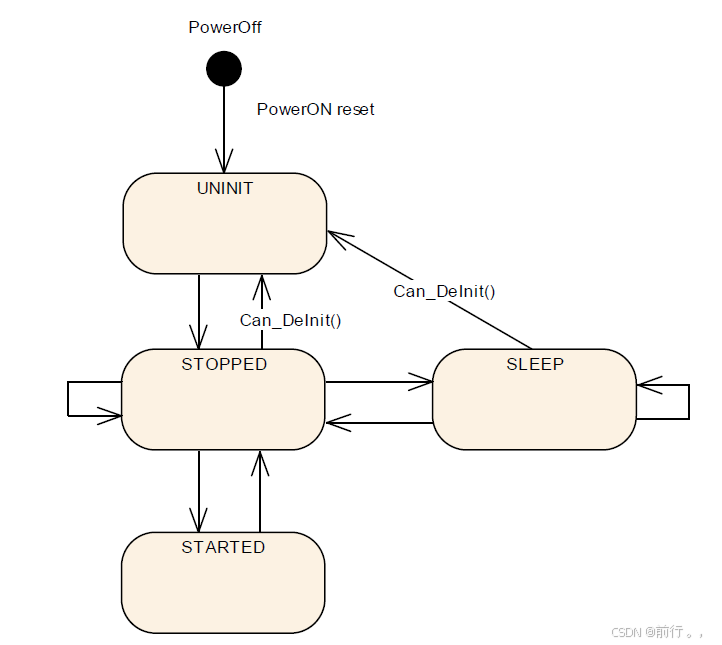
CanTrcv也一样,有一套自己的状态机流程: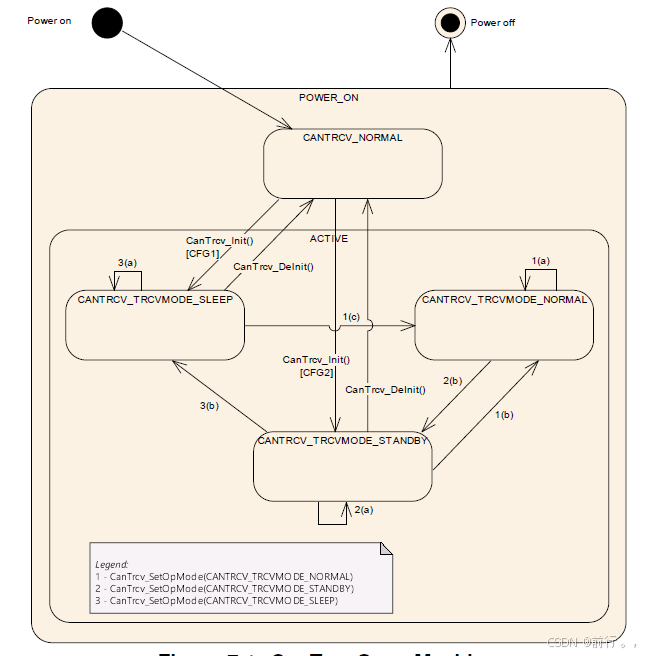
本文文字描述多点,更像是本人的使用笔记,仅供参考,如有不对地方欢迎指教。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 26
26 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)