蓝桥杯嵌入式组第九届省赛题目解析+STM32G431RBT6实现源码
蓝桥杯嵌入式组第九届题目解析+STM32G431RBT6实现源码。
文章目录
前言:STM32G431RBT6实现嵌入式组第九届题目解析+源码,本文默认读者具备基础的stm32知识。文章末尾有第九届题目。
1.题目解析
1.1 分而治之,藕断丝连
还是那句话,将不同模块进行封装,通过变量进行模块间的合作。
函数将模块分而治之,变量使模块间藕断丝连。
1.2 模块化思维导图
下图根据题目梳理。还是使用思维导图。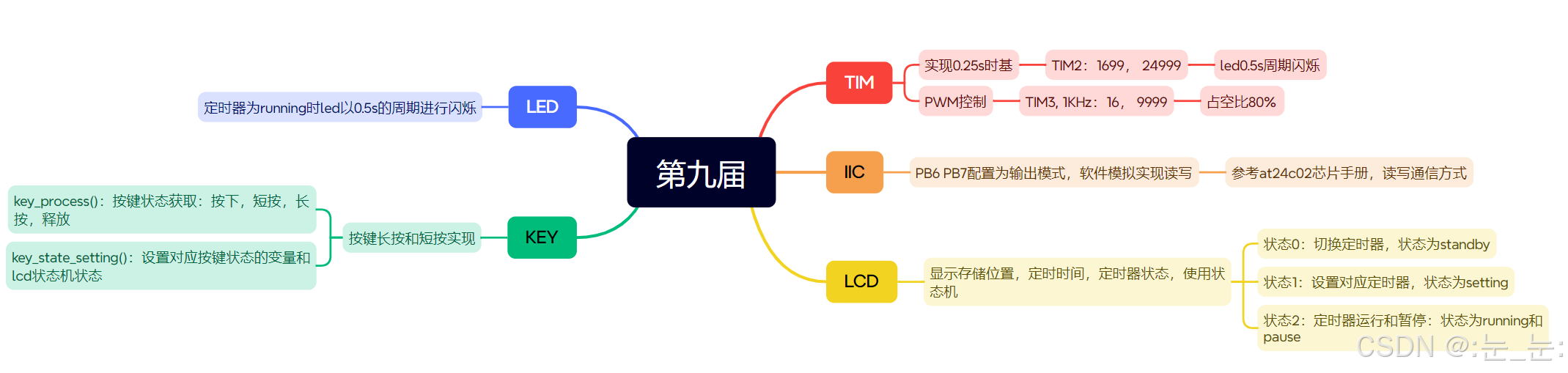
1.3 模块解析
整合模块,逻辑思维。第九届的难度就在按键长按和短按的处理上,如果会处理第九届难度不大,如果不会就寄了。
1.3.1 KEY模块
按键长按大家都想到的是计时,计时的方法有很多种,定时器生成时基,systick1ms时基。我们时基选择越小越好(其实也没必要,影响不大),为什么呢?假如生成1个10ms时基计数80次就到了800ms,假如你在n次周期和第n+1次中间按下按键,按下之后第一次计时不能够快速响应。理论上最大在0~10ms之间。那为什么每必要呢?因为我们做的事精度要求没有那么高。
我写的有个缺点无法解决,就是长按之前必然会执行一次短按。
函数开始读取四个按键状态,然后遍历判断按键是否按下。如果按键按下,判断是否是刚按下,如果是,设置对应需要的状态。如果不是计时判断>=800ms长按,否则短按。如果没有按下,设置释放状态。
void key_process()
{
keys_state[0] = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0); //读取电平状态
keys_state[1] = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1);
keys_state[2] = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2);
keys_state[3] = HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0);
for(int i = 0; i<4; i++)
{
if(keys_state[i] == 0) //如果按键按下
{
if(keys[i] == key_released){ //证明是刚开始按下
keys[i] = key_pressed;
short_pressed_limit = 1;
key_pressed_start = HAL_GetTick(); //开始计时
}
else{
if(HAL_GetTick() - key_pressed_start >= 800) //超过0.8s长按
{
if(i == 0) keys[i] = key_short_pressed; //按键1没有长按
else keys[i] = key_long_pressed;
}else{ //其他都是短按
keys[i] = key_short_pressed;
}
}
}
else{ //电平为高,按键释放
keys[i] = key_released;
}
}
}
1.3.2 LED模块
定时器在运行状态下,led以0.5s周期闪烁,所以需要0.25s的时基,一闪一灭0.5s一个周期。其他状态灭。
这里只说解决思路,具体代码请看源码
1.3.3 LCD模块
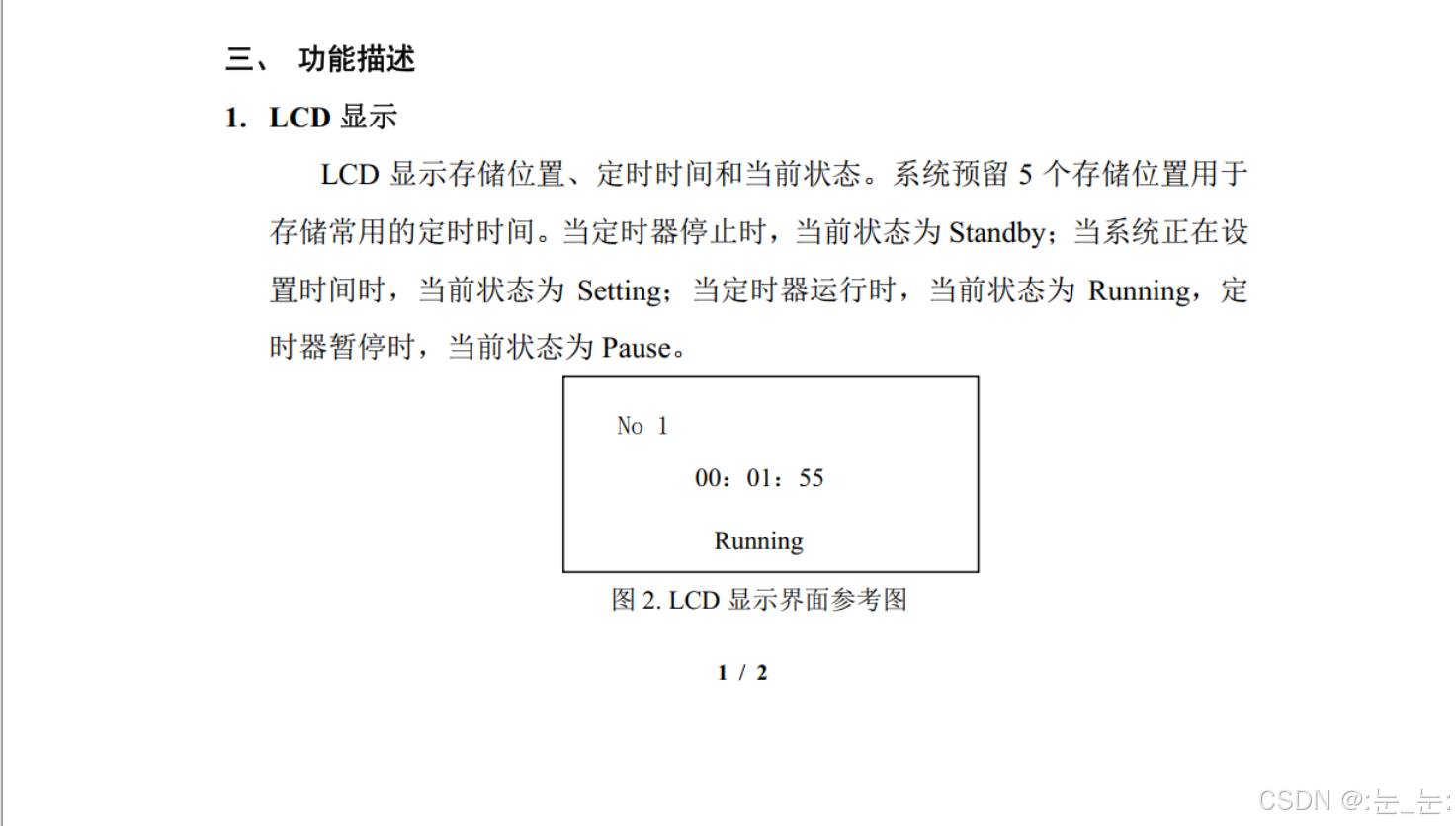
lcd显示存储位置,定时时间,定时器状态。使用到状态机。
根据四个按键的状态在三种状态之间不停的切换。
状态0:切换显示5个定时器,standby状态;
状态1:设置定时器,设置对应时间位高亮显示,setting状态;
状态2:定时器running和pause状态。
具体实现看源码
1.3.3.1 高亮处理函数
我不知道高亮到底是啥意思,随便设置了一下背景色和文本颜色。
/**
* @brief 高亮显示对应时间设置位
* @param str: 指定序列
line: 指定行
start: 序列高亮起始位置
end: 序列高亮结束位置
* @retval
*/
void highLight(char *str, u8 line,u8 start, u8 end)
{
for(int i=0;i<start;i++)
LCD_DisplayChar(line, 320-16*i, str[i]);
LCD_SetTextColor(Red);
LCD_SetBackColor(Black);
for(int i=start;i<end;i++)
LCD_DisplayChar(line, 320-16*i, str[i]);
LCD_SetTextColor(Black);
LCD_SetBackColor(White);
for(int i=end;i<strlen(str);i++)
LCD_DisplayChar(line, 320-16*i, str[i]);
}
1.3.4 IIC模块
完成eeprom中数据的读写。开发板的PB6和PB7设置为开漏输出,使用软件模拟实现单字节数据的读写。注意:魔术棒->c\c+±>optimization选项要设置成-O0,要不然代码执行后得不到想要的结果。
1.3.4.1 软件模拟读写上图中的Byte Write 和 Random Read
//iic写入软件模拟
void iic_write(u8 addr, u8 data)
{
I2CStart();
I2CSendByte(0xa0);
I2CSendAck();
I2CSendByte(addr);
I2CSendAck();
I2CSendByte(data);
I2CSendAck();
I2CStop();
}
//iic读取软件模拟
u8 iic_read(u8 addr)
{
u8 ret = 0;
I2CStart();
I2CSendByte(0xa0);
I2CSendAck();
I2CSendByte(addr);
I2CSendAck();
I2CStart();
I2CSendByte(0xa1);
I2CSendAck();
ret = I2CReceiveByte();
I2CSendNotAck();
I2CStop();
return ret;
}
1.3.4.2 at24c02读写定时器
每一次读写必须延时(3~5ms之间),这是rom的缺点。
/**
* @brief at24c02写入软件模拟
* @param addr_seq: 指定地址
*/
void at24c02_write(u8 addr_seq)
{
u8 *timer_member_ptr[3] = {&timer[addr_seq-1].hours,
&timer[addr_seq-1].minutes,
&timer[addr_seq-1].seconds};
for(u8 i=0;i<3;i++)
{
iic_write(3*addr_seq+i, *timer_member_ptr[i]);
HAL_Delay(3);
}
}
/**
* @brief at24c02读取软件模拟
* @param addr_seq: 指定地址
*/
void at24c02_read(u8 addr_seq)
{
u8 *timer_member_ptr[3] = {&timer[addr_seq-1].hours,
&timer[addr_seq-1].minutes,
&timer[addr_seq-1].seconds};
for(u8 i=0;i<3;i++)
{
*timer_member_ptr[i] = iic_read(3*addr_seq+i);
if(i==0 && *timer_member_ptr[i] >23){ //初始读取eeprom数据,保证数据的正确性
*timer_member_ptr[i] = 0;
}else if(*timer_member_ptr[i] > 59){
*timer_member_ptr[i] = 0;
}
HAL_Delay(3);
}
}
1.3.5 TIM模块
TIM2产生0.25s时基。PSC:1699,ARR:24999;
TIM3产生频率为1KHz的pwm。PSC:16,ARR:9999;
PSC和ARR计算公式(计算周期就是频率的倒数):
1.3.5.1 pwm和led处理
//pwm周期完成结束回调函数
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
if(global_state == 2 && tim_run_pause == 0) //running状态输出pwm占空比80%
TIM3->CCR1 = 7999;
else{ //其他状态不输出
TIM3->CCR1 = 0;
}
}
//tim时基周期回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(global_state == 2 && tim_run_pause == 0){ //running状态led闪烁
tim2_base_1s++;
led_flash ^= 1; //0,1变化
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, 1);
GPIOC->ODR = 0xff00 ^ led_flash << 8;
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, 0);
}else{ //其他状态led灭
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, 1);
GPIOC->ODR = 0xff00;
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, 0);
}
}
1.3.5.2 定时器倒计时借位
秒向分借位,分向时借位,如果都为0
/**
* @brief 定时器倒计时时间借位和倒计时结束判断
* @param tim_req: 指定定时器
*/
void tim_running(u8 tim_req)
{
if(timer[tim_req-1].seconds == 0) //秒为0,分钟借位
{
if(timer[tim_req-1].minutes == 0) //分为0,小时借位
{
if(timer[tim_req-1].minutes != 0){
timer[tim_req-1].hours --;
timer[tim_req-1].minutes = 59;
timer[tim_req-1].seconds = 59;
}
}else{
timer[tim_req-1].minutes --;
timer[tim_req-1].seconds = 59;
}
}else{
timer[tim_req-1].seconds--;
}
if(timer[tim_req-1].hours == 0 && timer[tim_req-1].minutes == 0 && timer[tim_req-1].seconds == 0) //定时器结束判断
{
global_state = 0;
}
}
2.源码
我所有的实现都在main.c文件中。
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "i2c_hal.h"
#include "lcd.h"
#include "string.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//按键状态枚举
enum{
key_pressed = 0U,
key_released,
key_reduction,
key_short_pressed,
key_long_pressed
};
//时间结构体
typedef struct{
uint8_t hours;
uint8_t minutes;
uint8_t seconds;
} timer_t;
timer_t timer[5] = {11,11,11};
/*
short_pressed_limit:限制短按所执行的程序只执行一次
B1_addr_cycle:B1控制存储地址
B2_tim_set_cycle:B2控制时分秒切换
tim2_base_1s:产生倒计时1s时基
tim_run_pause:定时器运行暂停状态控制,1:运行,0:暂停
global_state:状态机标志,0:切换定时器存储地址,1:设置时间,2:控制定时器运行暂停结束
led_flash:led闪烁控制
*/
uint8_t short_pressed_limit = 0, B1_addr_cycle = 1, B2_tim_set_cycle = 0, tim2_base_1s = 0,
tim_run_pause = 1, tim_standby = 0, global_state = 0, led_flash = 0;
/*
key_pressed_start:800ms计时
*/
uint32_t key_pressed_start = 0;
/*
keys:按键按下状态
keys_state:检测按键对应引脚状态
*/
uint8_t keys[4] = {0}, keys_state[4] = {0};
/*
lcd_str:lcd显示
tim_state:显示定时器状态
*/
char lcd_str[20] = {0}, tim_state[20] = {0};
void key_process();
void key_state_setting();
void state_process();
void lcd_process();
void highLight(char *str, u8 line,u8 start, u8 end);
void iic_write(u8 addr, u8 data);
u8 iic_read(u8 addr);
void at24c02_write(u8 addr_seq);
void at24c02_read(u8 addr_seq);
void tim_running(u8 tim_req);
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
LCD_Init();
LCD_Clear(White);
LCD_SetTextColor(Black);
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start_IT(&htim3, TIM_CHANNEL_1); //PA6pwm中断
HAL_TIM_Base_Start_IT(&htim2); //0.25s时基中断
//初始化读取eeprom数据
for(u8 i=1;i<6;i++)
{
at24c02_read(i);
}
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
key_process();
key_state_setting();
state_process();
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1_BOOST);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV6;
RCC_OscInitStruct.PLL.PLLN = 85;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
//获取按键状态,按下,短按,长按,释放
void key_process()
{
keys_state[0] = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0); //读取电平状态
keys_state[1] = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1);
keys_state[2] = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2);
keys_state[3] = HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0);
for(int i = 0; i<4; i++)
{
if(keys_state[i] == 0) //如果按键按下
{
if(keys[i] == key_released){ //证明是刚开始按下
keys[i] = key_pressed;
short_pressed_limit = 1;
key_pressed_start = HAL_GetTick(); //开始计时
}
else{
if(HAL_GetTick() - key_pressed_start >= 800) //超过0.8s长按
{
if(i == 0) keys[i] = key_short_pressed; //按键1没有长按
else keys[i] = key_long_pressed;
}else{ //其他都是短按
keys[i] = key_short_pressed;
}
}
}
else{ //电平为高,按键释放
keys[i] = key_released;
}
}
}
//根据按键状态设置对应要求标志
void key_state_setting()
{
if(keys[0] == key_short_pressed && short_pressed_limit == 1) //B1按下+短按限制
{
short_pressed_limit = 0; //保证短按只执行一次
B1_addr_cycle++; //地址循环
if(B1_addr_cycle == 6) B1_addr_cycle = 0;
global_state = 0; //状态为1
}
if(keys[1] == key_short_pressed && short_pressed_limit == 1)
{
short_pressed_limit = 0;
B2_tim_set_cycle++;
if(B2_tim_set_cycle == 3) B2_tim_set_cycle = 0;
global_state = 1;
}
else if(keys[1] == key_long_pressed) //B2长按处理
{
at24c02_write(B1_addr_cycle);
global_state = 0;
}
if(global_state == 1){ //保证B2按下后B3起作用
if(keys[2] == key_short_pressed && short_pressed_limit == 1 || keys[2] == key_long_pressed) //B3长按短按处理都一样,只是B3短按加了短按限制
{
if(keys[2] == key_short_pressed) short_pressed_limit = 0;
if(B2_tim_set_cycle == 1){ //小时处理0-23
timer[B1_addr_cycle-1].hours++;
if(timer[B1_addr_cycle-1].hours == 24)
timer[B1_addr_cycle-1].hours = 0;
}
else if(B2_tim_set_cycle == 2){ //分钟处理0-23
timer[B1_addr_cycle-1].minutes++;
if(timer[B1_addr_cycle-1].minutes == 60)
timer[B1_addr_cycle-1].minutes = 0;
}else{ //秒处理0-23
timer[B1_addr_cycle-1].seconds++;
if(timer[B1_addr_cycle-1].seconds == 60)
timer[B1_addr_cycle-1].seconds = 0;
}
}
}
if(keys[3] == key_short_pressed && short_pressed_limit == 1)
{
short_pressed_limit = 0;
tim_run_pause ^= 1; //运行暂停切换
global_state = 2;
}
else if(keys[3] == key_long_pressed)
{
global_state = 0;
}
}
//状态显示,0:切换不同的定时器,1:设置定时器,2:定时器运行暂停结束控制
void state_process()
{
switch(global_state)
{
case 0:
sprintf(lcd_str, " No %d ", B1_addr_cycle);
LCD_DisplayStringLine(Line2, (uint8_t*)lcd_str);
sprintf(lcd_str, " %2d:%2d:%2d ", timer[B1_addr_cycle-1].hours,
timer[B1_addr_cycle-1].minutes,timer[B1_addr_cycle-1].seconds);
LCD_DisplayStringLine(Line4, (uint8_t*)lcd_str);
sprintf(tim_state, " Standby ");
LCD_DisplayStringLine(Line6, (uint8_t*)tim_state);
break;
case 1:
sprintf(lcd_str, " No %d ", B1_addr_cycle);
LCD_DisplayStringLine(Line2, (uint8_t*)lcd_str);
sprintf(lcd_str, " %2d:%2d:%2d ", timer[B1_addr_cycle-1].hours,
timer[B1_addr_cycle-1].minutes,timer[B1_addr_cycle-1].seconds);
if(B2_tim_set_cycle == 1)
{
highLight(lcd_str, Line4, 6, 8);
}
else if(B2_tim_set_cycle == 2)
{
highLight(lcd_str, Line4, 9, 11);
}
else
{
highLight(lcd_str, Line4, 12, 14);
}
sprintf(tim_state, " Setting ");
LCD_DisplayStringLine(Line6, (uint8_t*)tim_state);
break;
case 2:
sprintf(lcd_str, " No %d ", B1_addr_cycle);
LCD_DisplayStringLine(Line2, (uint8_t*)lcd_str);
sprintf(lcd_str, " %2d:%2d:%2d ", timer[B1_addr_cycle-1].hours,
timer[B1_addr_cycle-1].minutes,timer[B1_addr_cycle-1].seconds);
LCD_DisplayStringLine(Line4, (uint8_t*)lcd_str);
if(tim_run_pause == 0){
if(tim2_base_1s == 4){
tim2_base_1s = 0;
tim_running(B1_addr_cycle);
}
sprintf(tim_state, " Running ");
}else{
sprintf(tim_state, " Pause ");
}
LCD_DisplayStringLine(Line6, (uint8_t*)tim_state);
break;
}
}
/**
* @brief 高亮显示对应时间设置位
* @param str: 指定序列
line: 指定行
start: 序列高亮起始位置
end: 序列高亮结束位置
* @retval
*/
void highLight(char *str, u8 line,u8 start, u8 end)
{
for(int i=0;i<start;i++)
LCD_DisplayChar(line, 320-16*i, str[i]);
LCD_SetTextColor(Red);
LCD_SetBackColor(Black);
for(int i=start;i<end;i++)
LCD_DisplayChar(line, 320-16*i, str[i]);
LCD_SetTextColor(Black);
LCD_SetBackColor(White);
for(int i=end;i<strlen(str);i++)
LCD_DisplayChar(line, 320-16*i, str[i]);
}
//iic写入软件模拟
void iic_write(u8 addr, u8 data)
{
I2CStart();
I2CSendByte(0xa0);
I2CSendAck();
I2CSendByte(addr);
I2CSendAck();
I2CSendByte(data);
I2CSendAck();
I2CStop();
}
//iic读取软件模拟
u8 iic_read(u8 addr)
{
u8 ret = 0;
I2CStart();
I2CSendByte(0xa0);
I2CSendAck();
I2CSendByte(addr);
I2CSendAck();
I2CStart();
I2CSendByte(0xa1);
I2CSendAck();
ret = I2CReceiveByte();
I2CSendNotAck();
I2CStop();
return ret;
}
/**
* @brief at24c02写入软件模拟
* @param addr_seq: 指定地址
*/
void at24c02_write(u8 addr_seq)
{
u8 *timer_member_ptr[3] = {&timer[addr_seq-1].hours,
&timer[addr_seq-1].minutes,
&timer[addr_seq-1].seconds};
for(u8 i=0;i<3;i++)
{
iic_write(3*addr_seq+i, *timer_member_ptr[i]);
HAL_Delay(3);
}
}
/**
* @brief at24c02读取软件模拟
* @param addr_seq: 指定地址
*/
void at24c02_read(u8 addr_seq)
{
u8 *timer_member_ptr[3] = {&timer[addr_seq-1].hours,
&timer[addr_seq-1].minutes,
&timer[addr_seq-1].seconds};
for(u8 i=0;i<3;i++)
{
*timer_member_ptr[i] = iic_read(3*addr_seq+i);
if(i==0 && *timer_member_ptr[i] >23){ //初始读取eeprom数据,保证数据的正确性
*timer_member_ptr[i] = 0;
}else if(*timer_member_ptr[i] > 59){
*timer_member_ptr[i] = 0;
}
HAL_Delay(3);
}
}
/**
* @brief 定时器倒计时时间借位和倒计时结束判断
* @param tim_req: 指定定时器
*/
void tim_running(u8 tim_req)
{
if(timer[tim_req-1].seconds == 0) //秒为0,分钟借位
{
if(timer[tim_req-1].minutes == 0) //分为0,小时借位
{
timer[tim_req-1].hours --;
timer[tim_req-1].minutes = 59;
timer[tim_req-1].seconds = 59;
}else{
timer[tim_req-1].minutes --;
timer[tim_req-1].seconds = 59;
}
}else{
timer[tim_req-1].seconds--;
}
if(timer[tim_req-1].hours == 0 && timer[tim_req-1].minutes == 0 && timer[tim_req-1].seconds == 0) //定时器结束判断
{
global_state = 0;
}
}
//pwm周期完成结束回调函数
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
if(global_state == 2 && tim_run_pause == 0) //running状态输出pwm占空比80%
TIM3->CCR1 = 7999;
else{ //其他状态不输出
TIM3->CCR1 = 0;
}
}
//tim时基周期回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(global_state == 2 && tim_run_pause == 0){ //running状态led闪烁
tim2_base_1s++;
led_flash ^= 1;
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, 1);
GPIOC->ODR = 0xff00 ^ led_flash << 8;
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, 0);
}else{ //其他状态led灭
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, 1);
GPIOC->ODR = 0xff00;
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, 0);
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
3.第九届题目

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 22
22 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)