FreeRTOS
(1)Free即免费的,RTOS的全称是Real time operating system,中文就是实时操作系统。uc/OS,FreeRTOS,RTX,RT-Thread等这些都是RTOS类操作系统。(2)FreeRTOS是免费的并且简单(文件数量很少),功能包括:任务管理、时间管理、信号量、消息队列、内存管理、记录功能、软件定时器、协程等。(3)FreeRTOS官网:https://freer
FreeRTOS
1 课程视频
(1)FreeRTOS操作系统本课程主要讲实操。
2 FreeRTOS介绍
(1)Free即免费的,RTOS的全称是Real time operating system,中文就是实时操作系统。uc/OS,FreeRTOS,RTX,RT-Thread等这些都是RTOS类操作系统。
(2)FreeRTOS是免费的并且简单(文件数量很少),功能包括:任务管理、时间管理、信号量、消息队列、内存管理、记录功能、软件定时器、协程等。
(3)FreeRTOS官网:https://freertos.org/。
(4)FreeRTOS 实现多任务的原理:严格来说 FreeRTOS 并不是实时操作系统,因为它是分时复用的。系统将时间分割成很多时间片,然后轮流执行各个任务。
每个任务都是独立运行的,互不影响,由于切换的频率很快,就感觉像是同时运行的一样。
3 移植FreeRTOS到上官二号平台
(1)移植方式:1.手动移植-参考博客链接https://blog.csdn.net/qq_61672347/article/details/125529482
(2)使用CubeMX快速移植-参考文档按步骤操作即可。
注:FreeRTOS内核配置说明博客链接:https://blog.csdn.net/zhzht19861011/article/details/50134883
2.1 从MCU开启项目 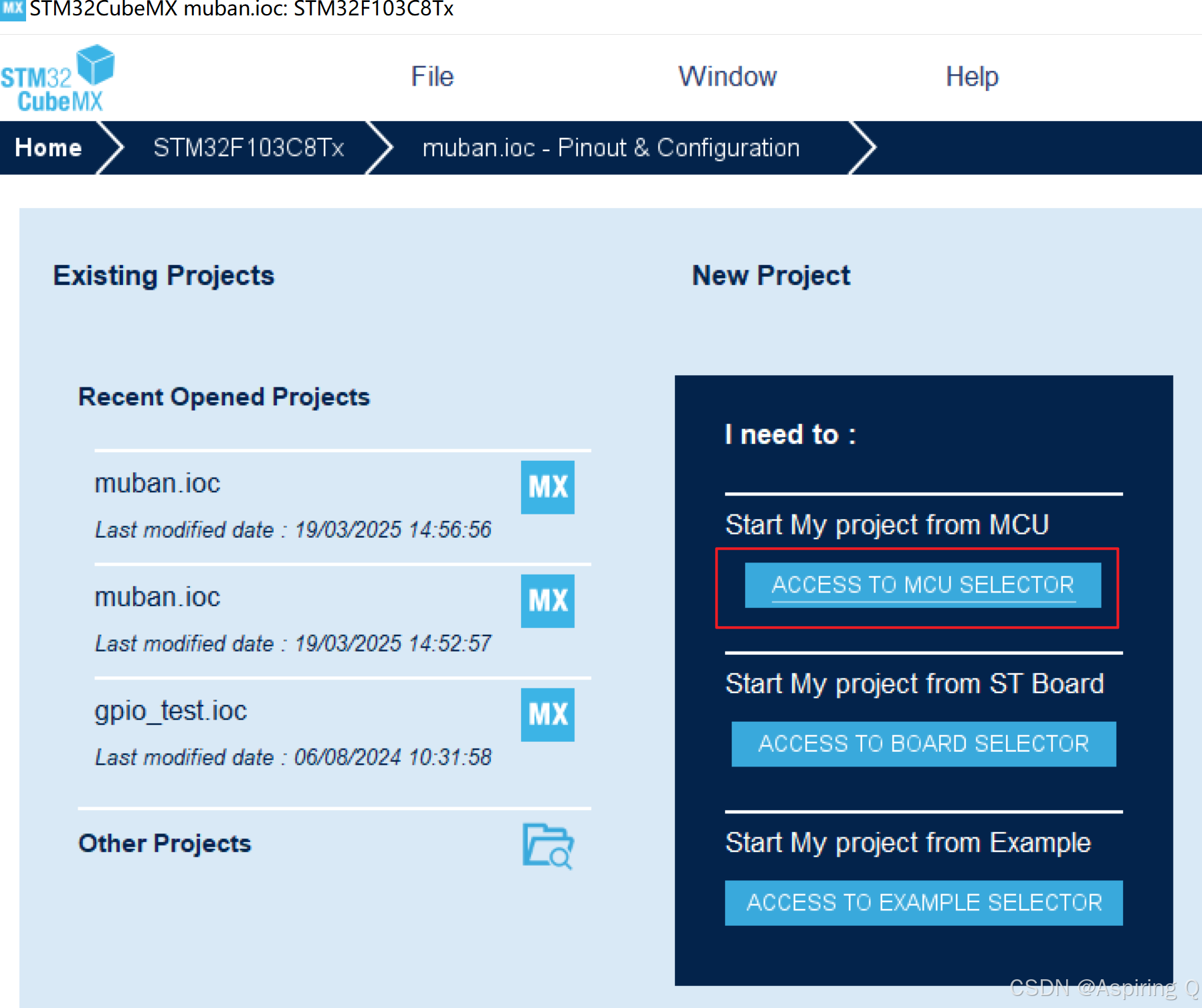
2.2 选择芯片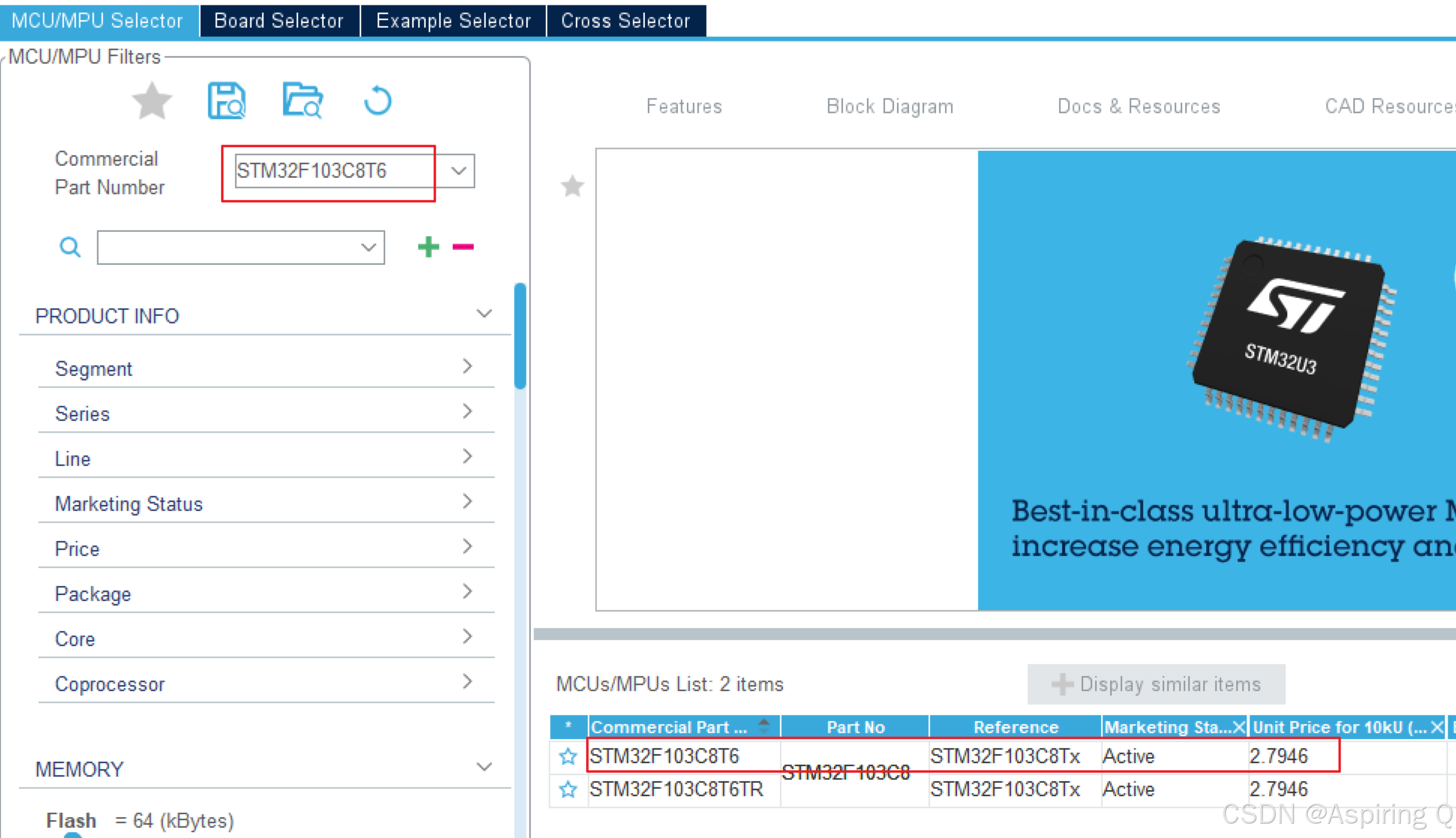
2.3 SYS设置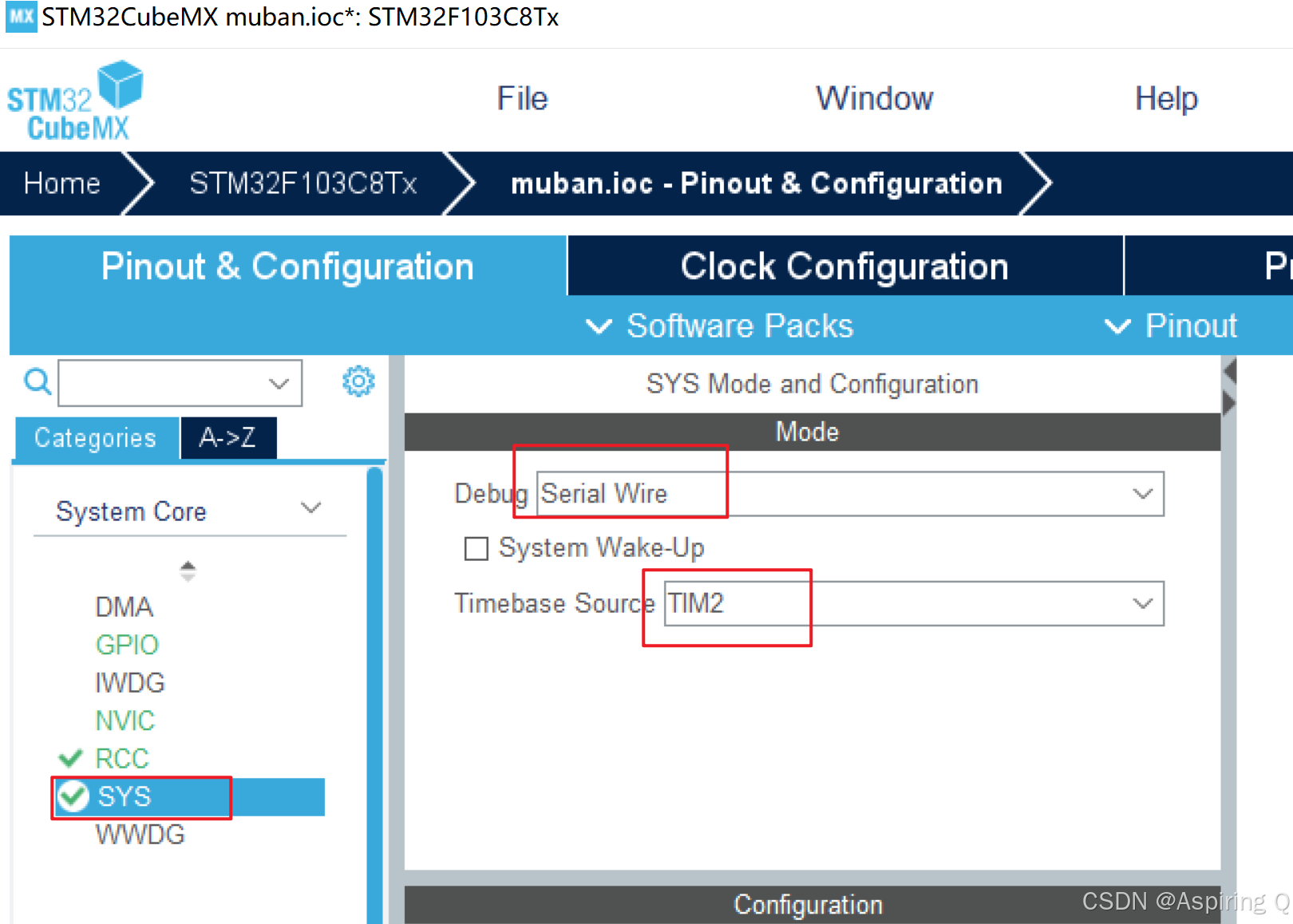
2.4 RCC设置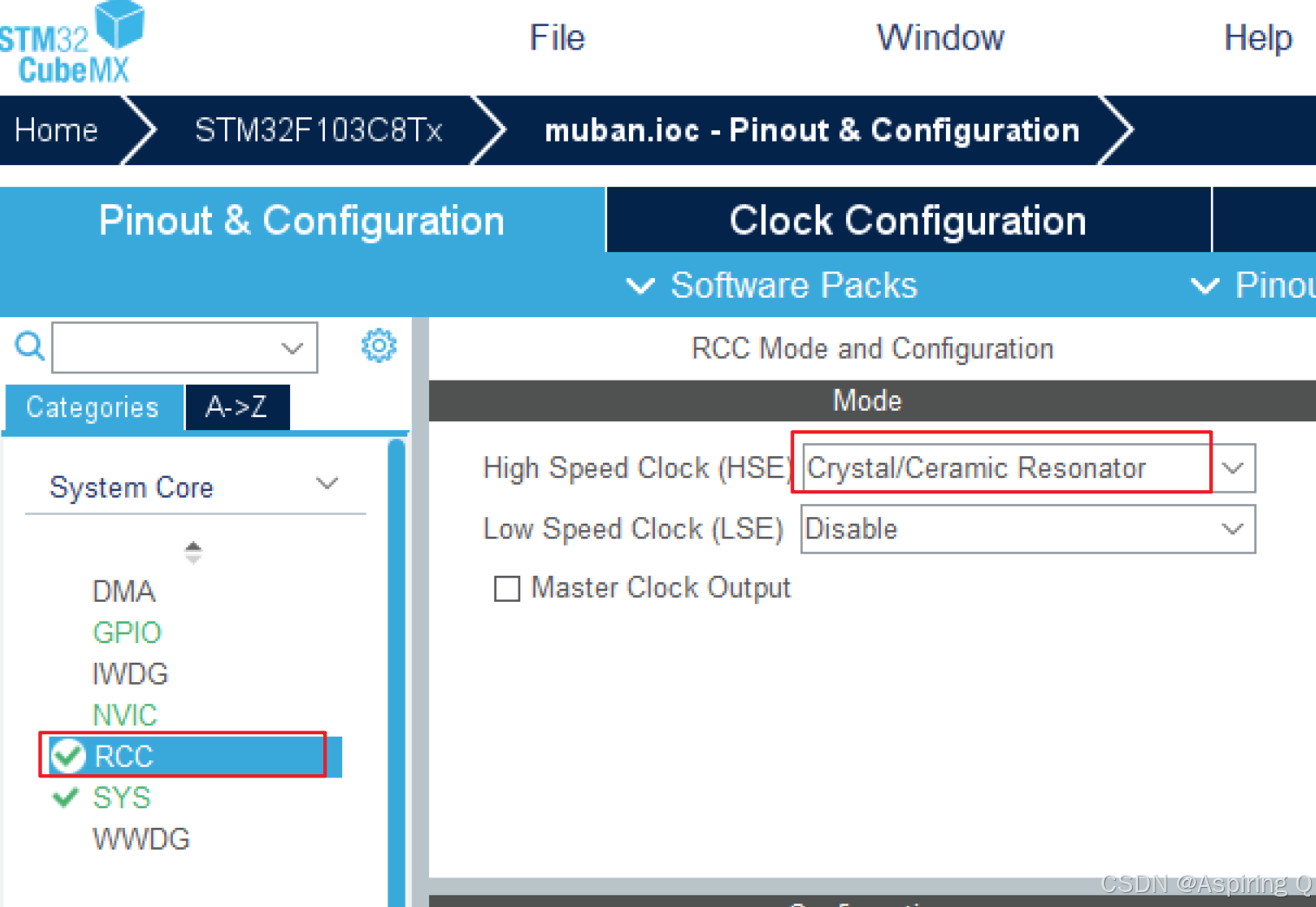
2.5 freertos版本设置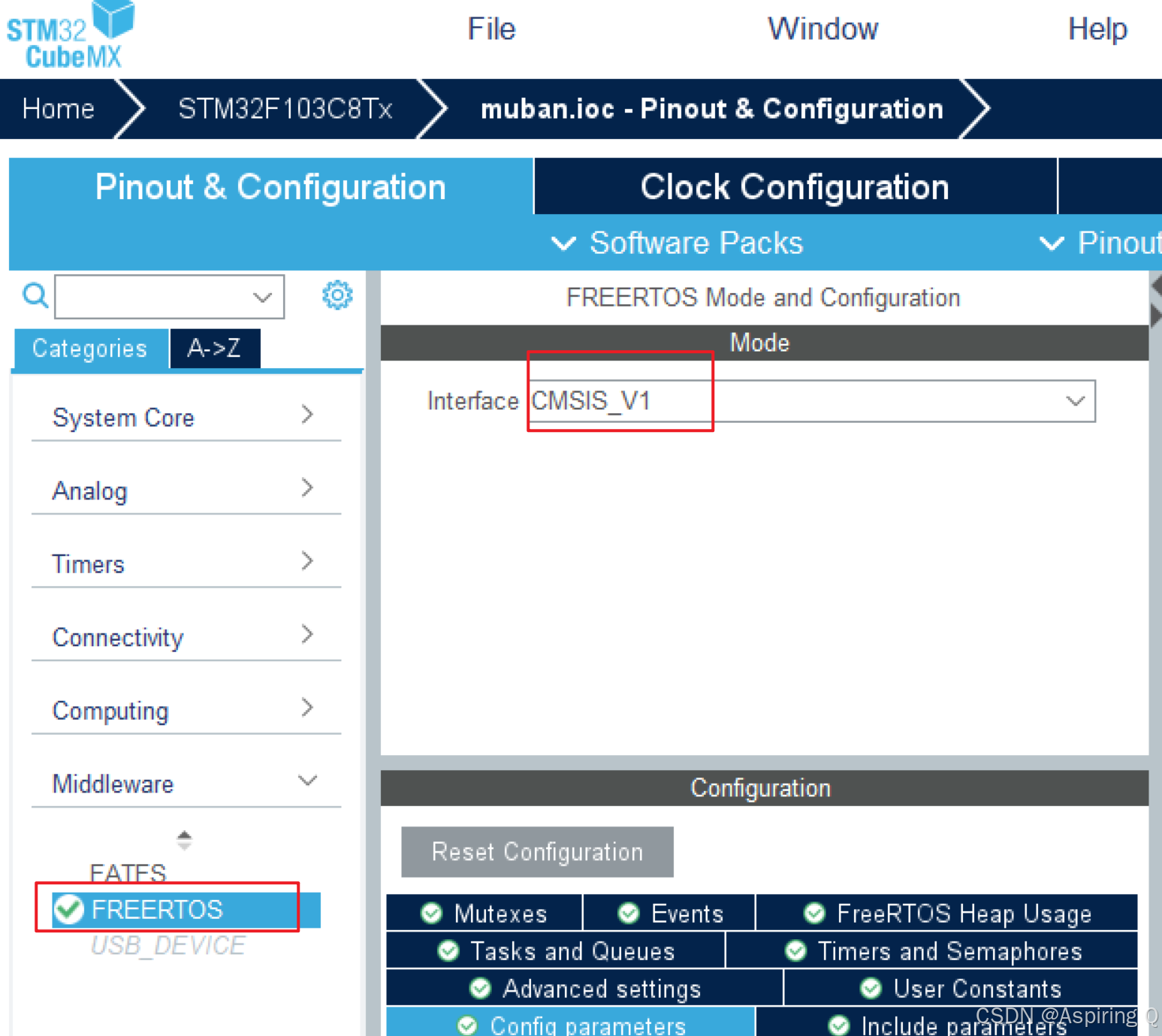
2.6 时钟设置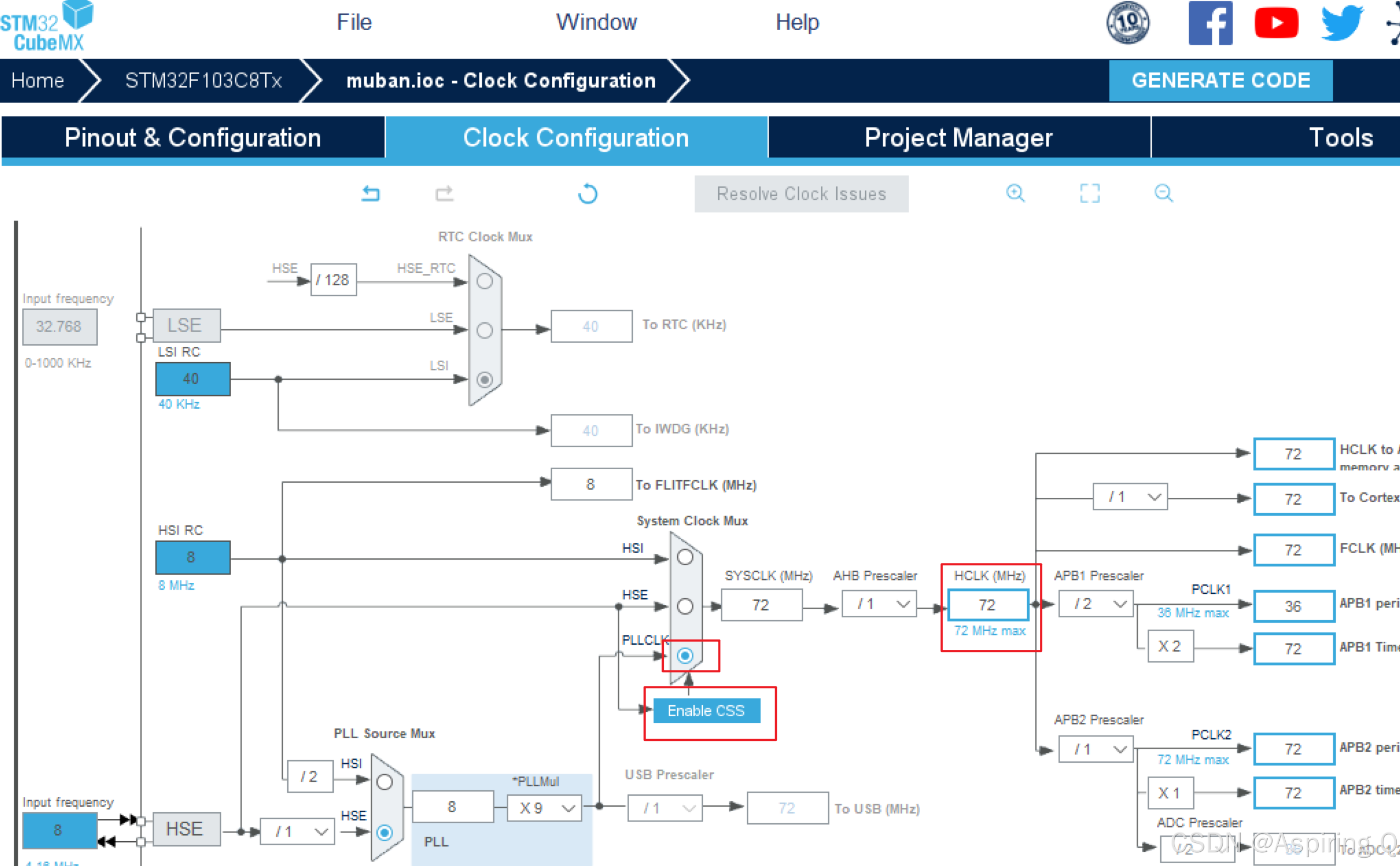
2.7工程设置
注:路径不能含中文或者空格,否则生成代码时会报错The Code is successfully generated under :
but MDK-ARM V5.32project generation have a problem.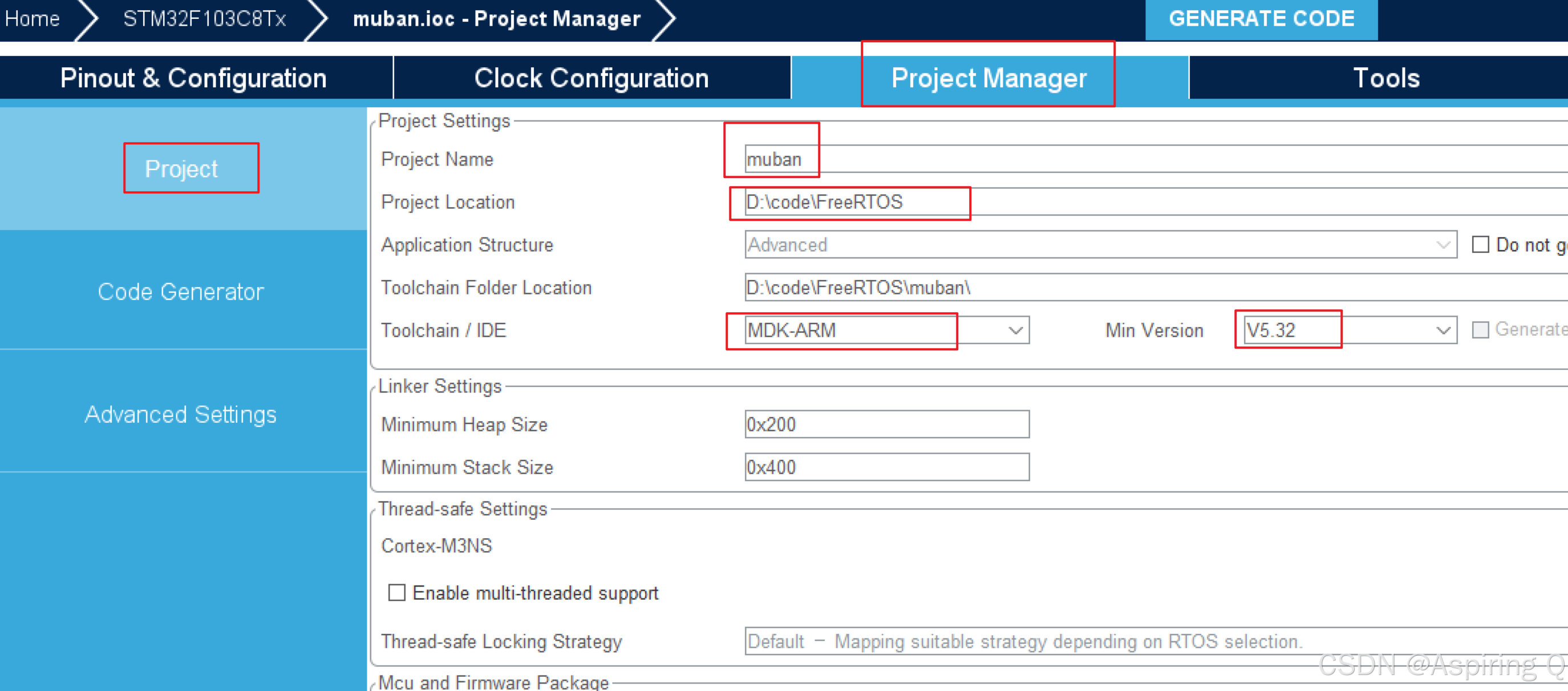
2.8代码生成设置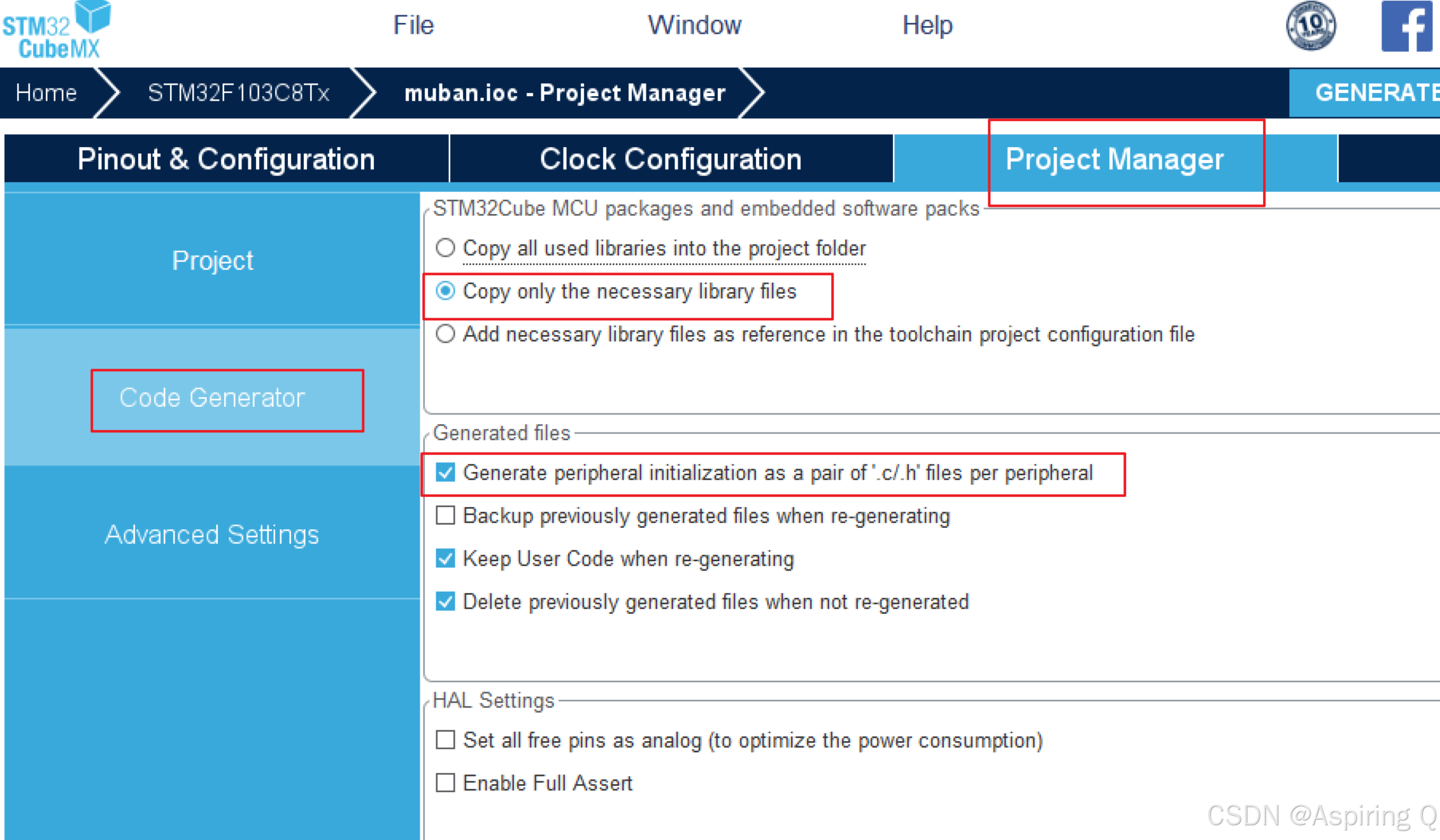
2.9 生成代码后打开工程项目(工程名muban)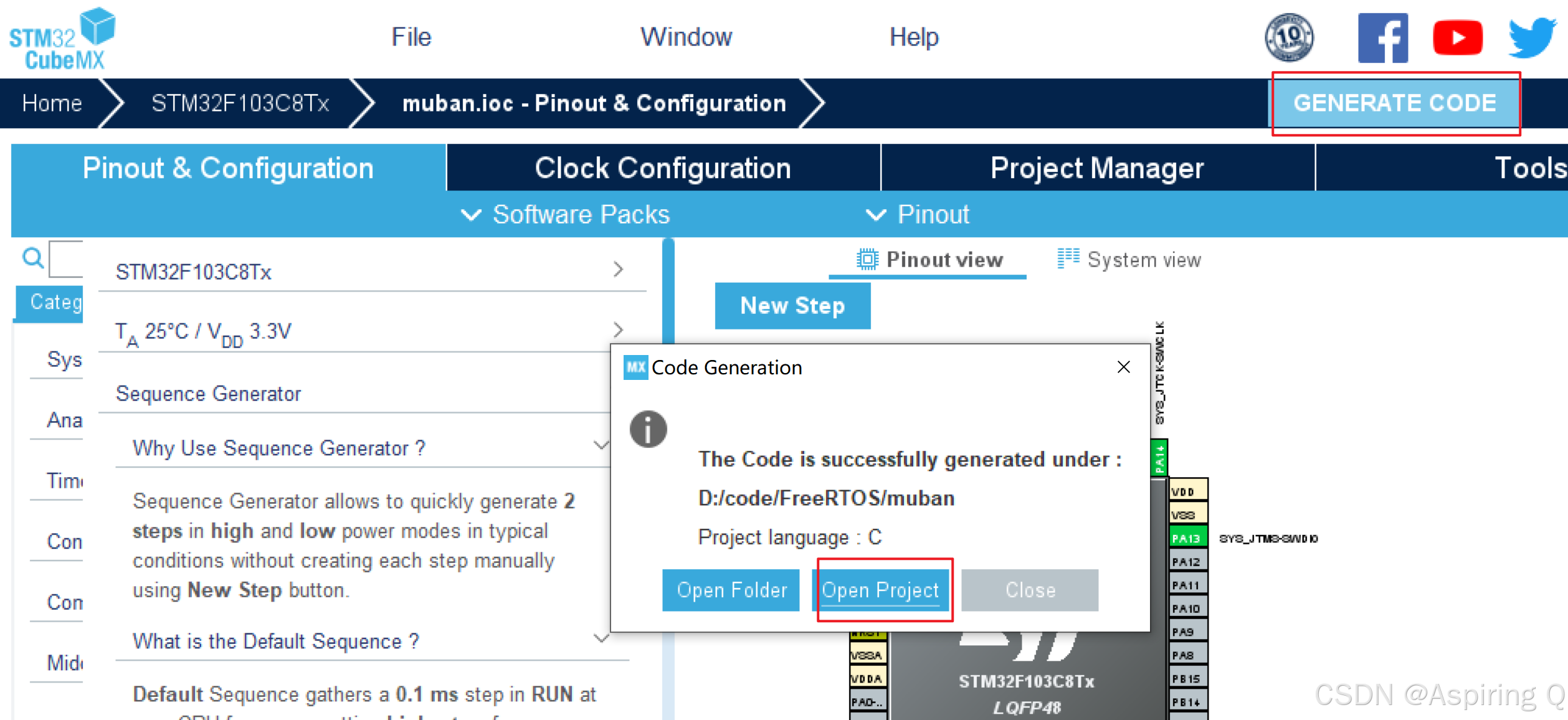
4 (补充)模板工程打开串口
(1)CubeMX中补充打开串口,作为最新模板;
1.1 步骤:串口选择异步模式,重新生成代码作为最新模板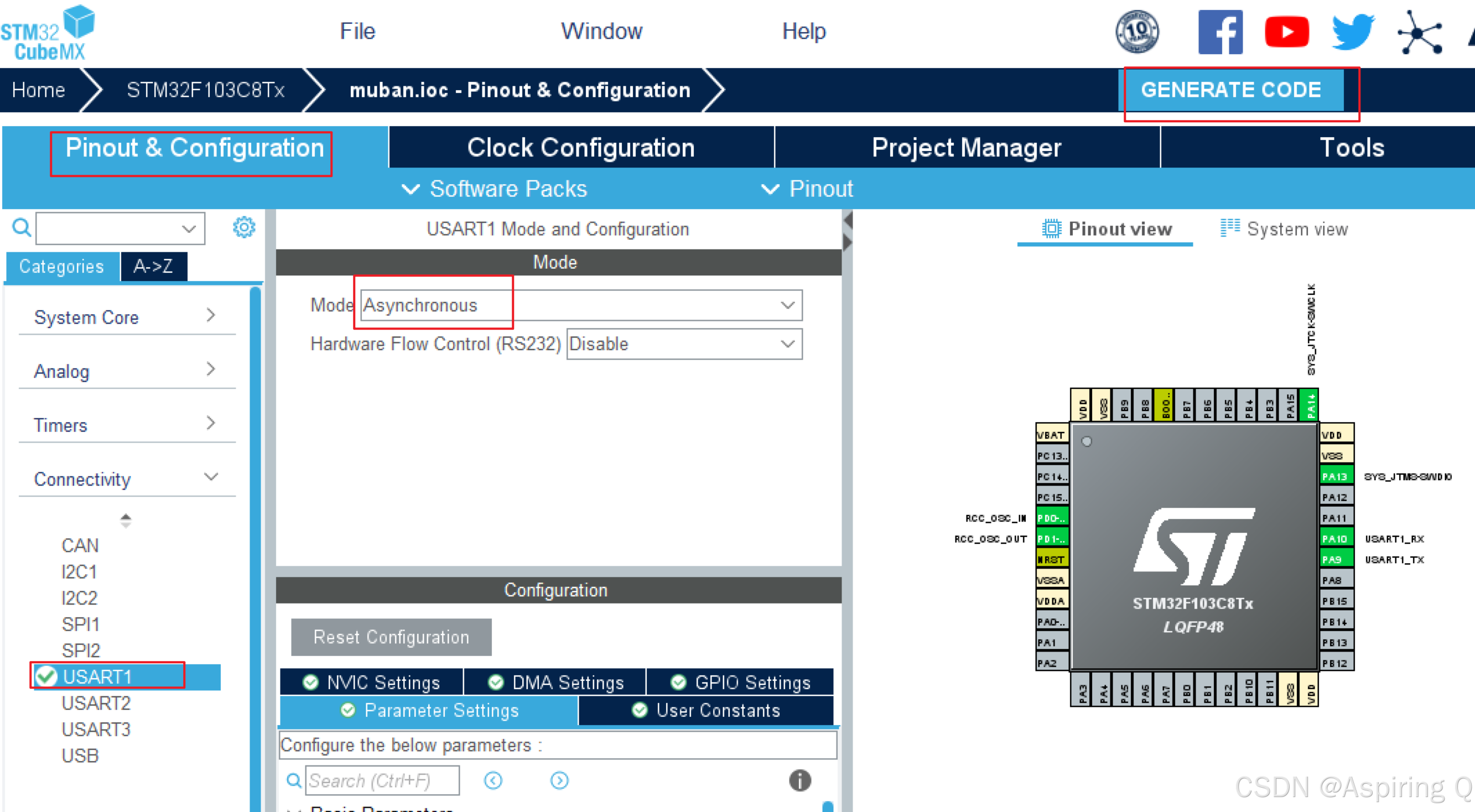
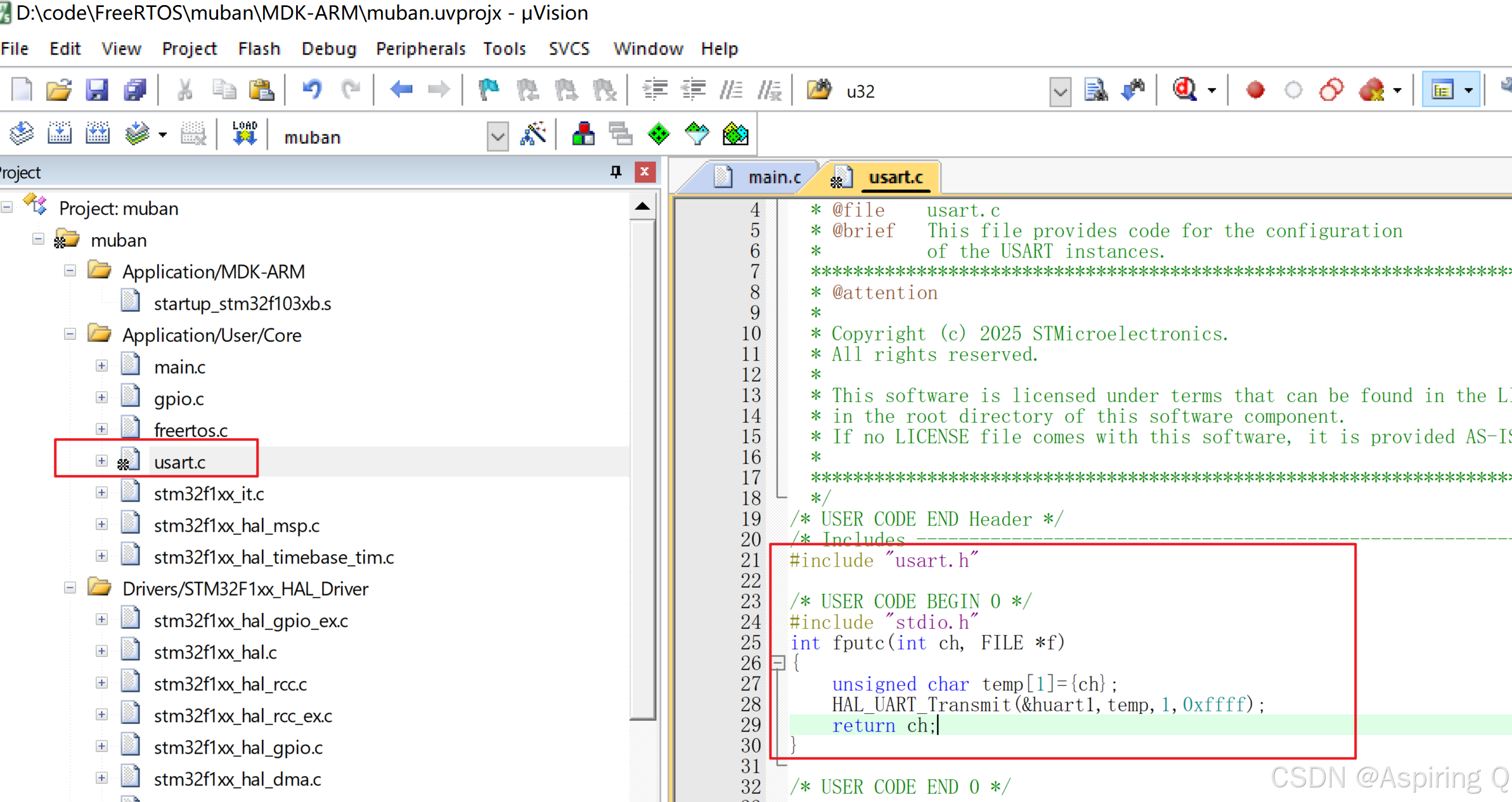
1.2 在usart.c中插入代码#include “stdio.h”
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
1.3 勾选Use MicroLIB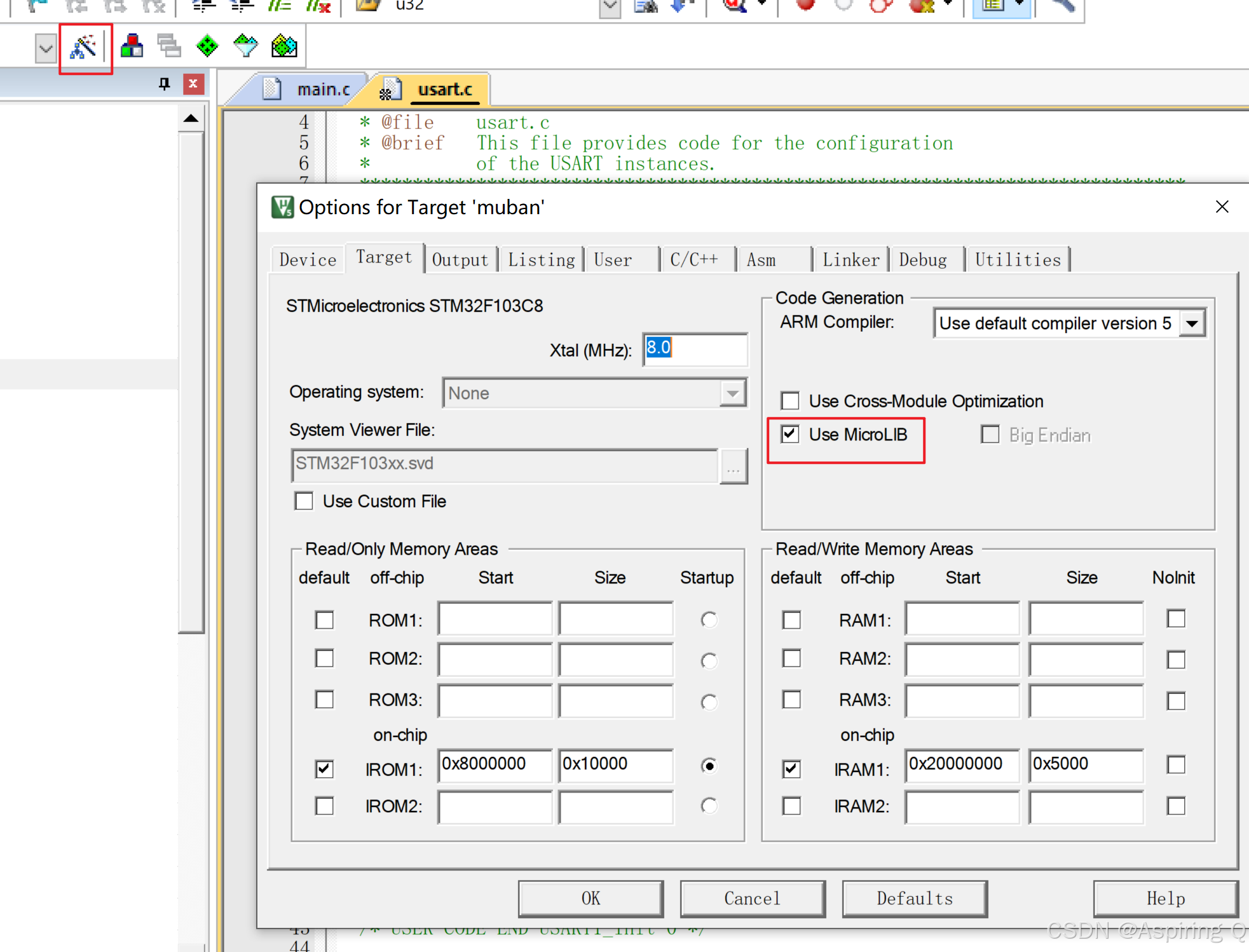
1.4 编写代码串口输出hello world,下载到stm32芯片中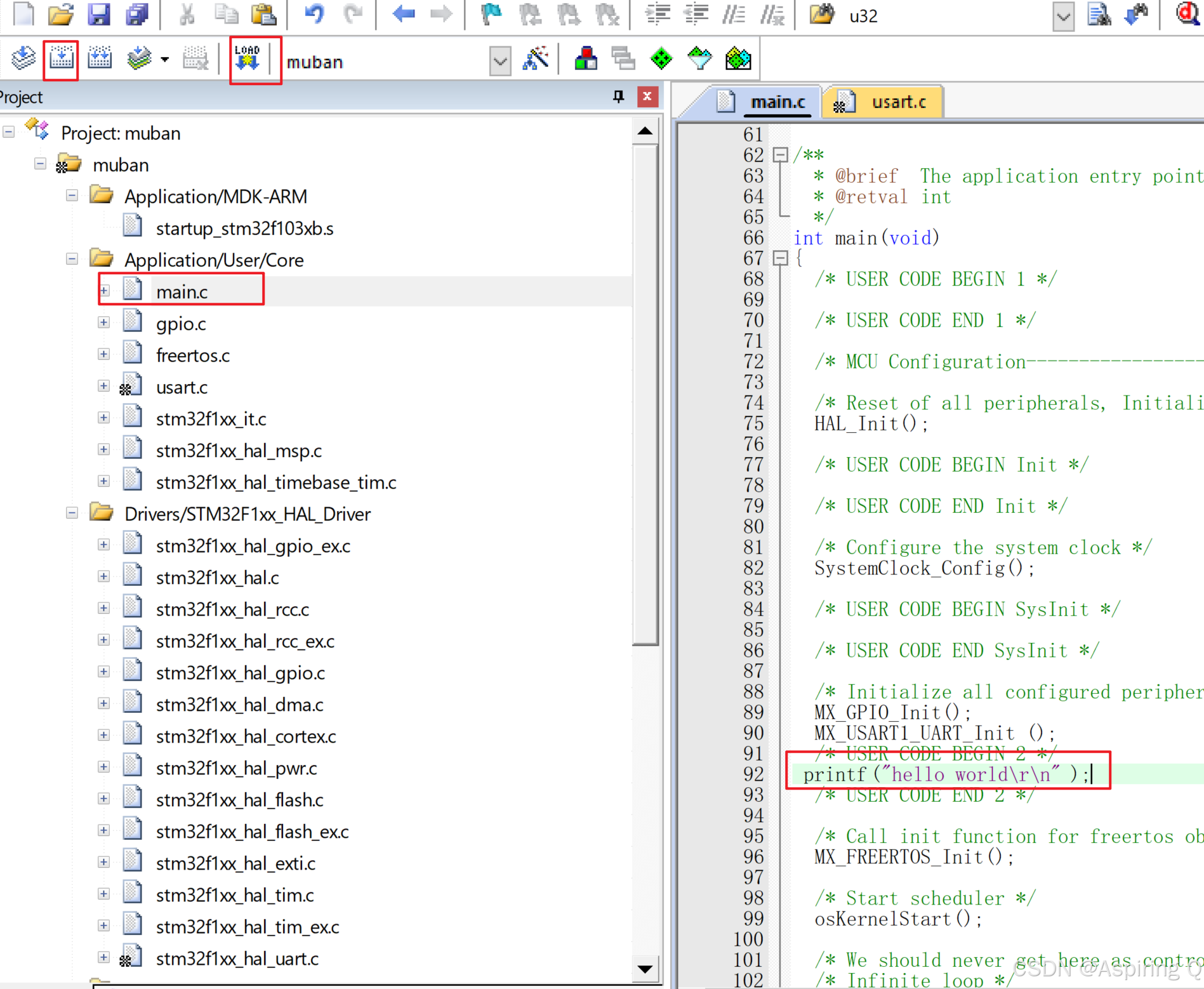
1.5 串口调试助手调试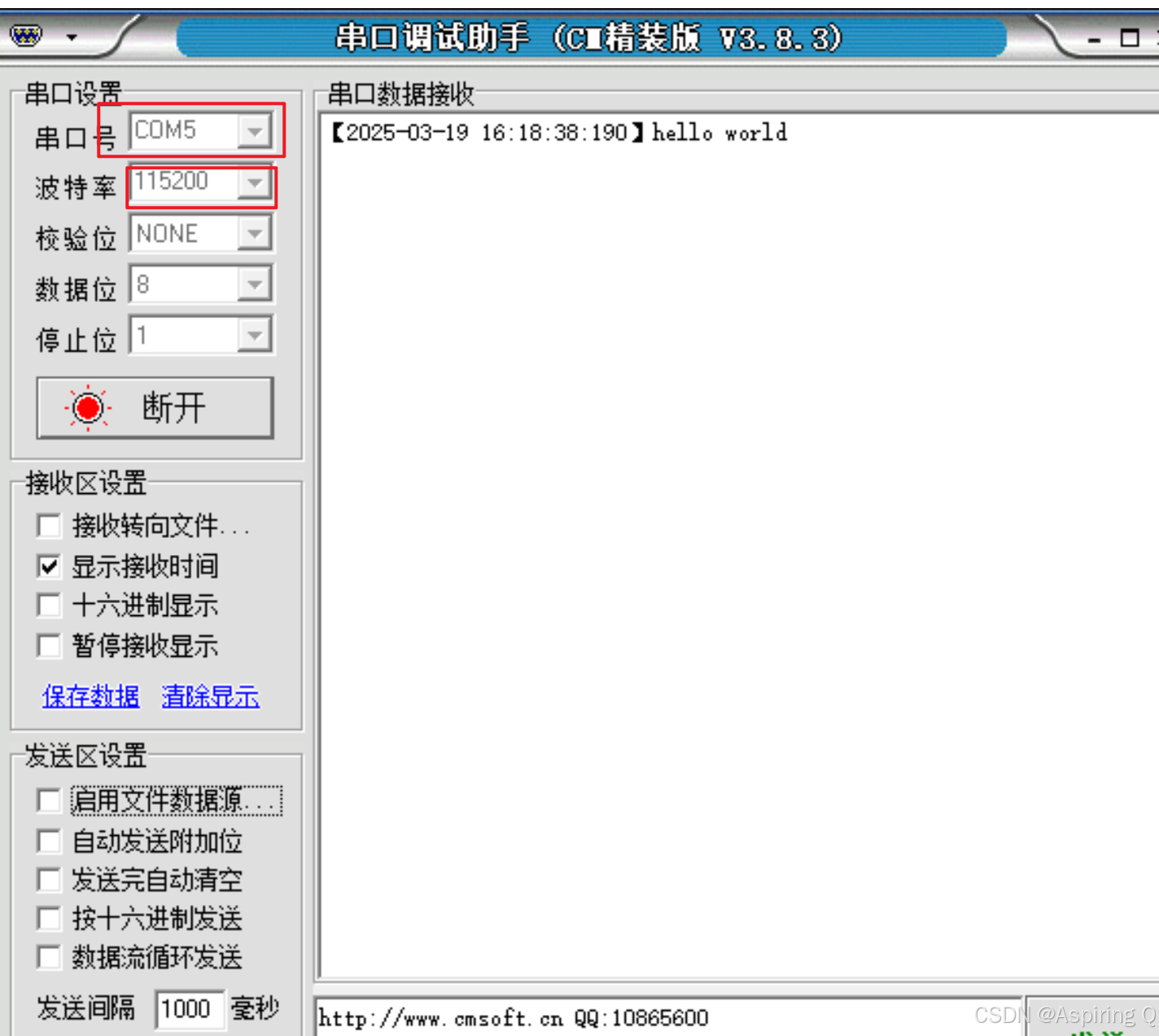
5 任务的创建与删除(理论)
(1)什么是任务:任务可以理解为进程/线程,创建一个任务,就会在内存开辟一个空间。
(2)任务创建与删除相关函数:xTaskCreate()(动态方式创建任务),xTaskCreateStatic(静态方式创建任务),vTaskDelete()(删除任务);
任务动态创建与静态创建的区别:动态创建任务的堆栈由系统分配,而静态创建任务的堆栈由用户自己传递。
(3)xTaskCreate函数原型:
BaseType_t xTaskCreate
(
TaskFunction_t pxTaskCode, /指向任务函数的指针/
const char* const pcName, /任务名字/
const configSTACK_DEPTH_TYPE, /任务堆栈大小/
void* const pvParameters, /传递给任务函数的参数/
UBaseType_t uxPriority, /任务优先级/
TaskHandle_t* const pxCreatedTask /任务句柄/
)
案例:
void vTaskCode( void * pvParameters )
{
for( ;; )
{
}
}
void vOtherFunction( void )
{
BaseType_t xReturned;
TaskHandle_t xHandle = NULL;
xReturned = xTaskCreate(vTaskCode,“NAME”,STACK_SIZE,( void * ) 1,tskIDLE_PRIORITY,&xHandle);
if( xReturned == pdPASS )
{
vTaskDelete( xHandle );
}
}
返回值:pdPASS 任务创建成功,errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY 任务创建失败;
(4)vTaskDelete 函数原型:void vTaskDelete(TaskHandle_t xTaskToDelete);
6 任务的创建与删除(实操)
(1)代码编写:复制模板工程(工程名muban),点击进入CubeMX中新建2个任务,并配置2gpio口输出,生成代码后在2任务函数中分别写led1延时500ms翻转,led2延时1000ms翻转;(工程名task_test)
1.1 创建任务taskLED1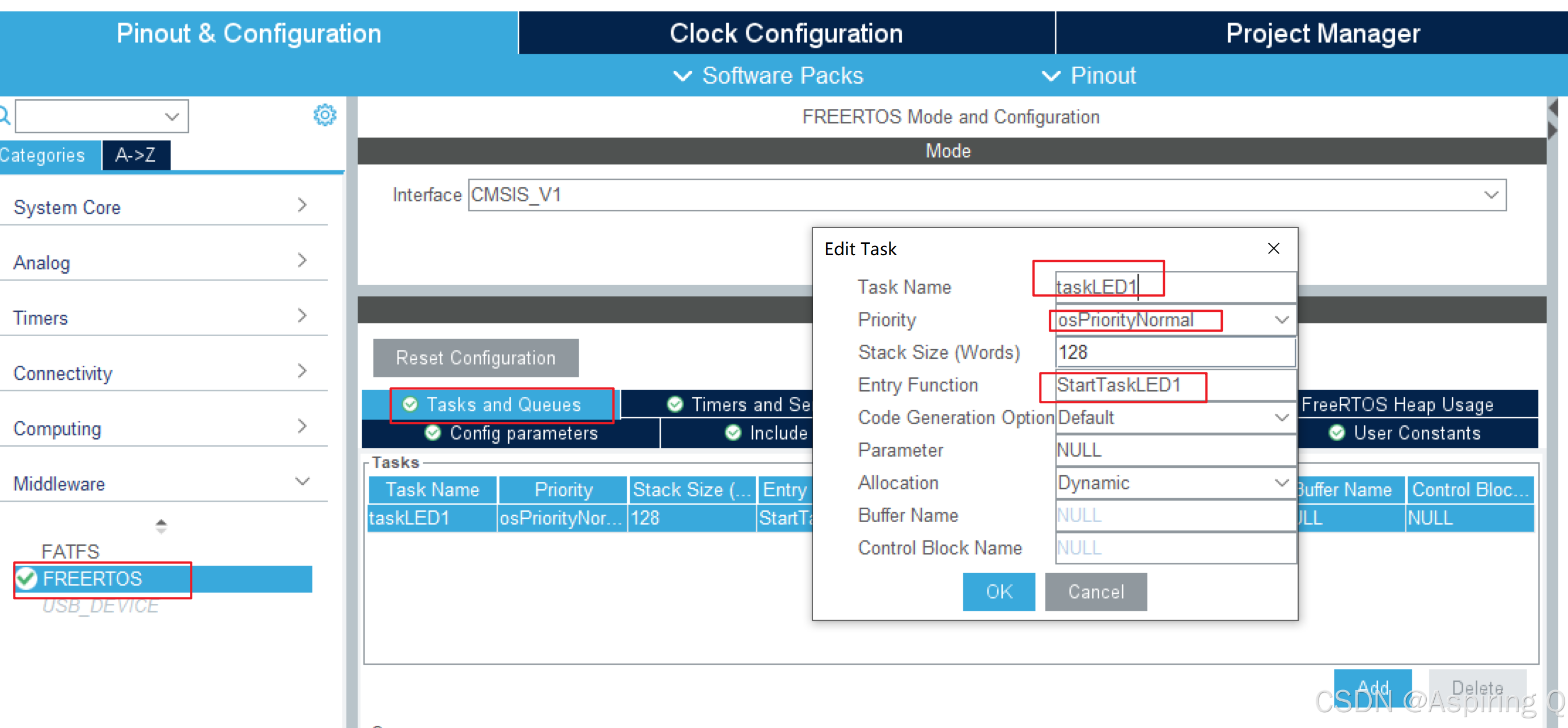
1.2 创建任务taskLED2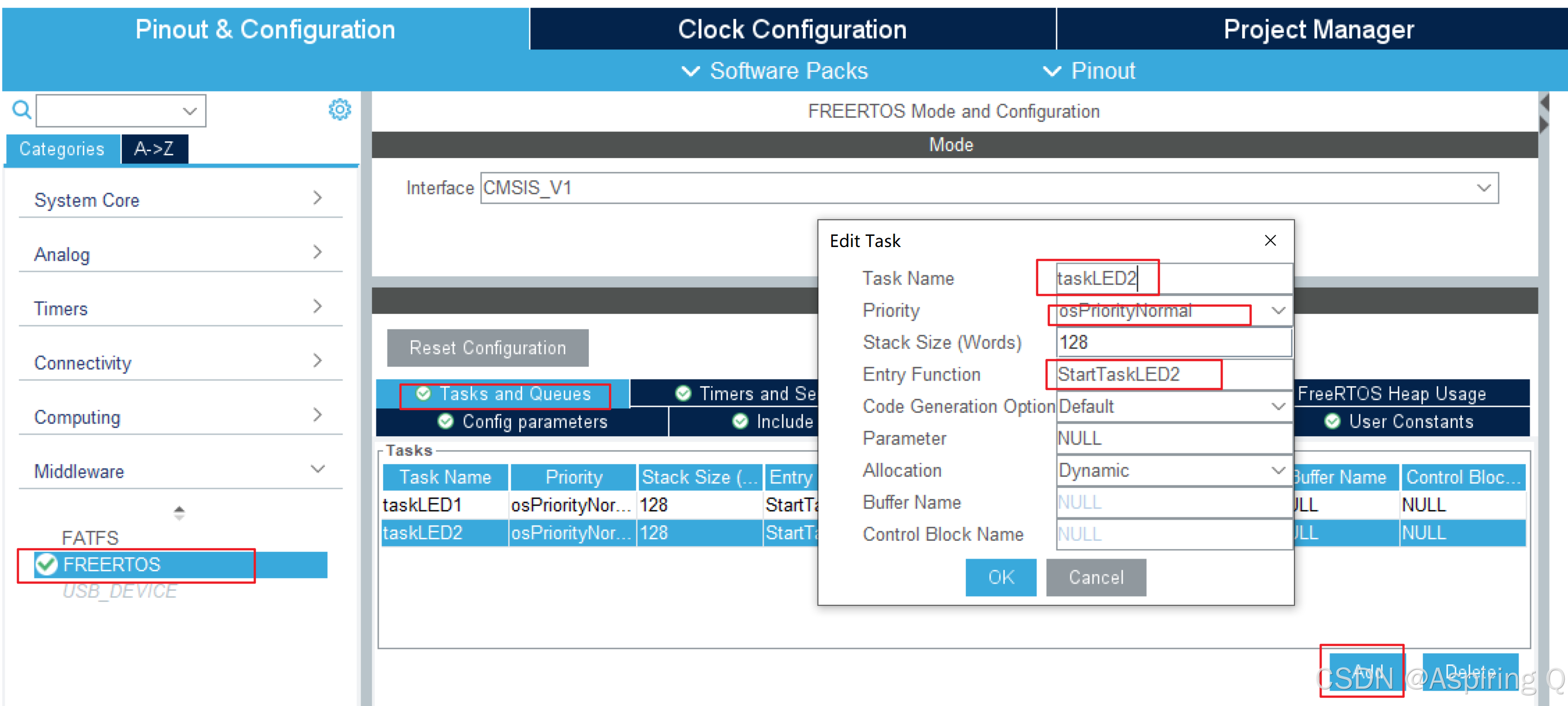
1.3 配置两引脚为GIPIO_Output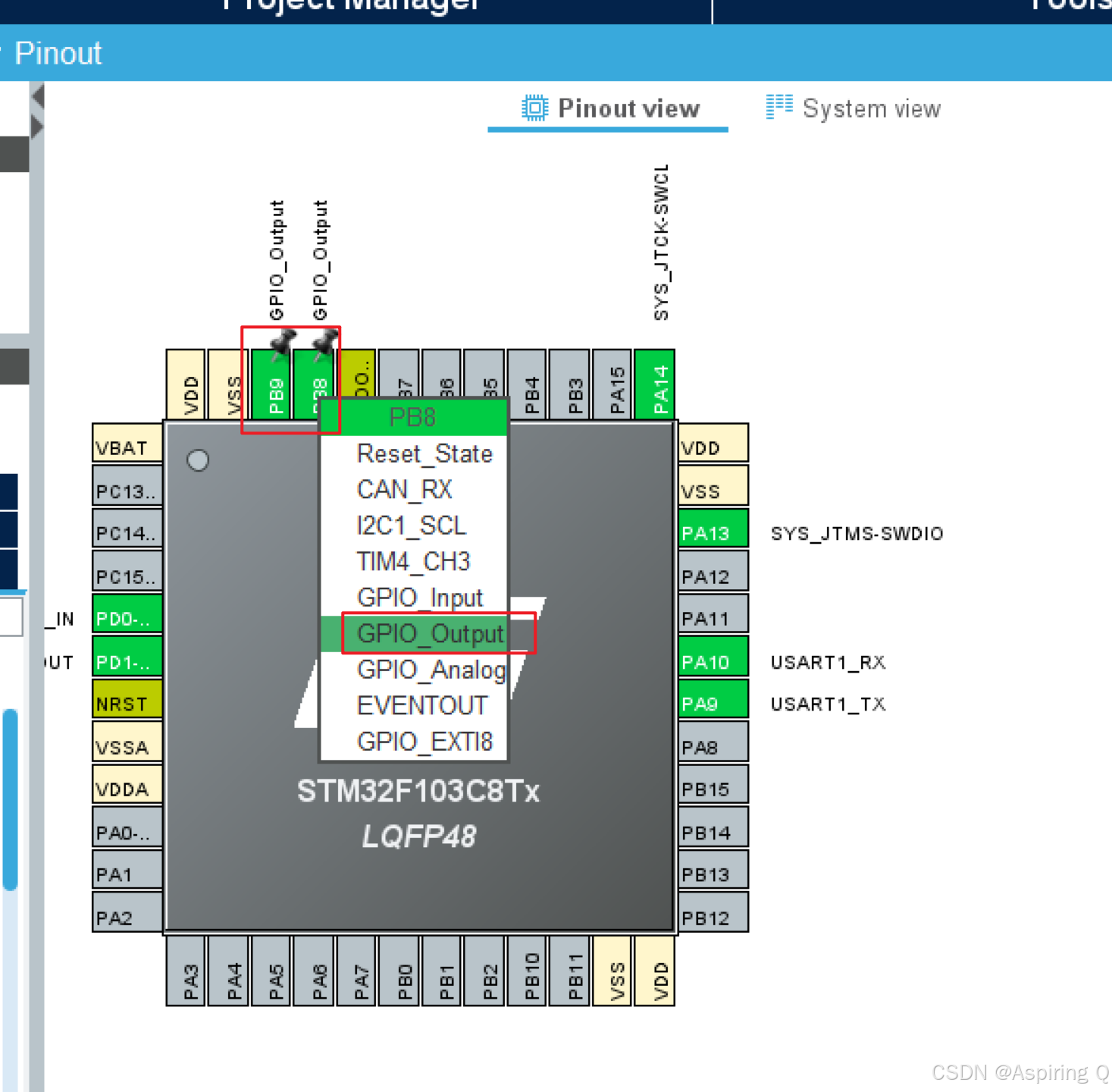
1.4 在任务taskLED1中编写led1延时500ms翻转,任务taskLED2中编写led2延时1000ms翻转;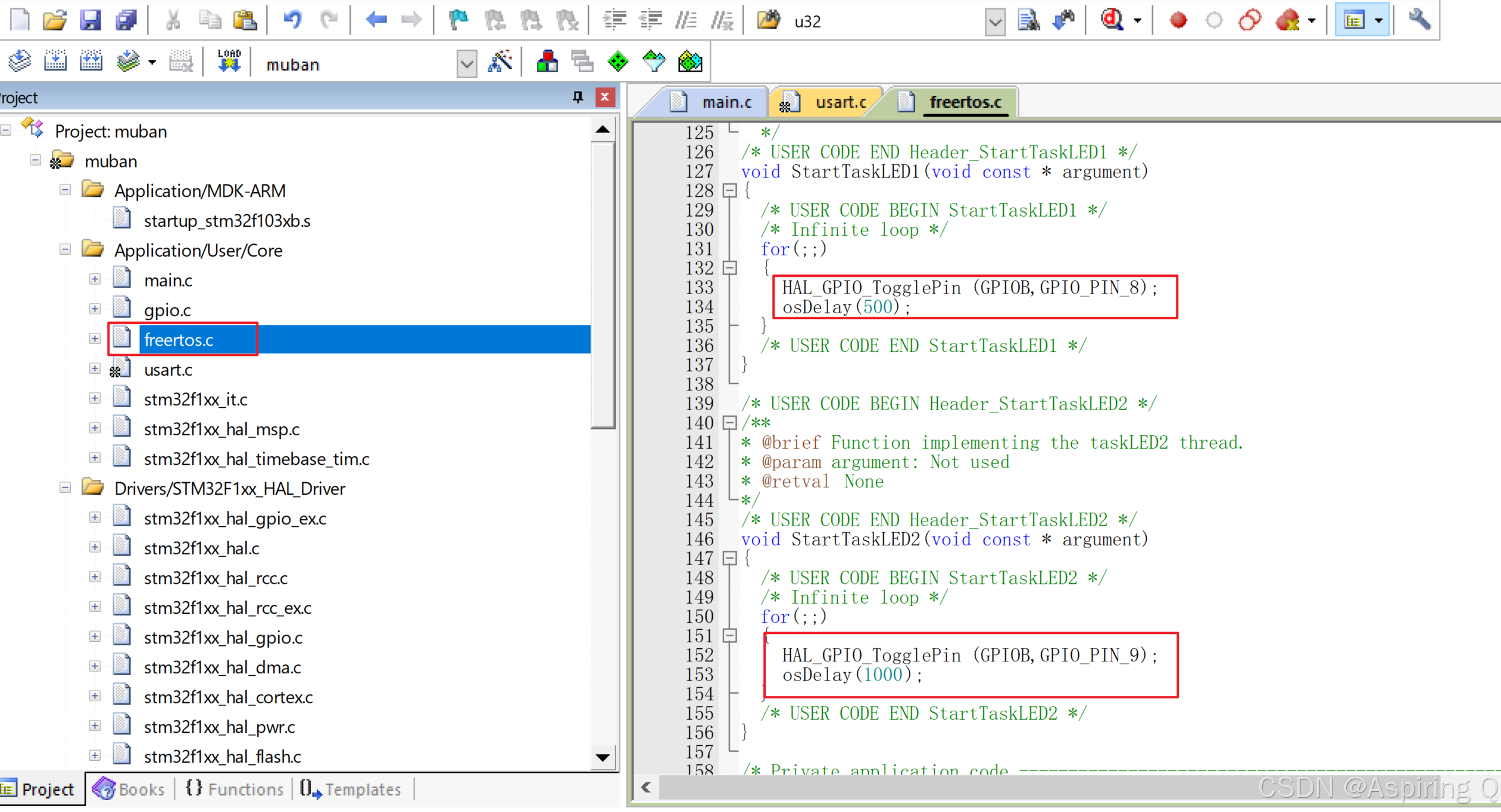
7 任务调度简介
(1)任务调度:使用相关的调度算法来决定当前需要执行的哪个任务。
(2)任务调度函数:开启任务调度的函数是 vTaskStartScheduler(),CubeMX 中被封装为osKernelStart();
(3)任务调度规则:1.高优先级抢占低优先级任务,系统永远执行最高优先级的任务(即抢占式调度)
2.同等优先级的任务轮转调度(即时间片调度)
8 任务状态及互相转换
(1)4种任务状态:
Running 运行态:当任务处于实际运行状态称之为运行态,即CPU的使用权被这个任务占用(同一时间仅一个任务处于运行态)。
Ready 就绪态:处于就绪态的任务是指那些能够运行(没有被阻塞和挂起),但是当前没有运行的任务,因为同优先级或更高优先级的任务正在运行。
Blocked 阻塞态:如果一个任务因延时,或等待信号量、消息队列、事件标志组等而处于的状态被称之为阻塞态。
Suspended 挂起态:类似暂停,通过调用函数 vTaskSuspend() 对指定任务进行挂起,挂起后这个任务将不被执行,只有调用函数 xTaskResume() 才可以将这个任务从挂起态恢复。
(2)4种任务相互转换:1. 仅就绪态可转变成运行态。
2. 其他状态的任务想运行,必须先转变成就绪态。
9 任务综合小实验
(1)任务需求:创建4个任务
taskLED1,间隔 500ms 闪烁 LED1;
taskLED2,间隔 1000ms 闪烁 LED2;
taskKEY1,如果 taskLED1 存在,则按下 KEY1 后删除 taskLED1 ,否则创建 taskLED1 ;
taskKEY2,如果 taskLED2 正常运行,则按下 KEY2 后挂起 taskLED2 ,否则恢复 taskLED2;
(2)代码编写:复制上个实验工程(工程名task_test),点击进入CubeMX中新建4个任务,并配置2gpio口输出,2gpio口输入,打开串口,生成代码后在taskKEY1进行taskLED1的创建与删除,taskKEY2中进行taskLED2的挂起与恢复;(工程名tasks_test)
2.1 PA0,PA1两引脚改为GPIO_Input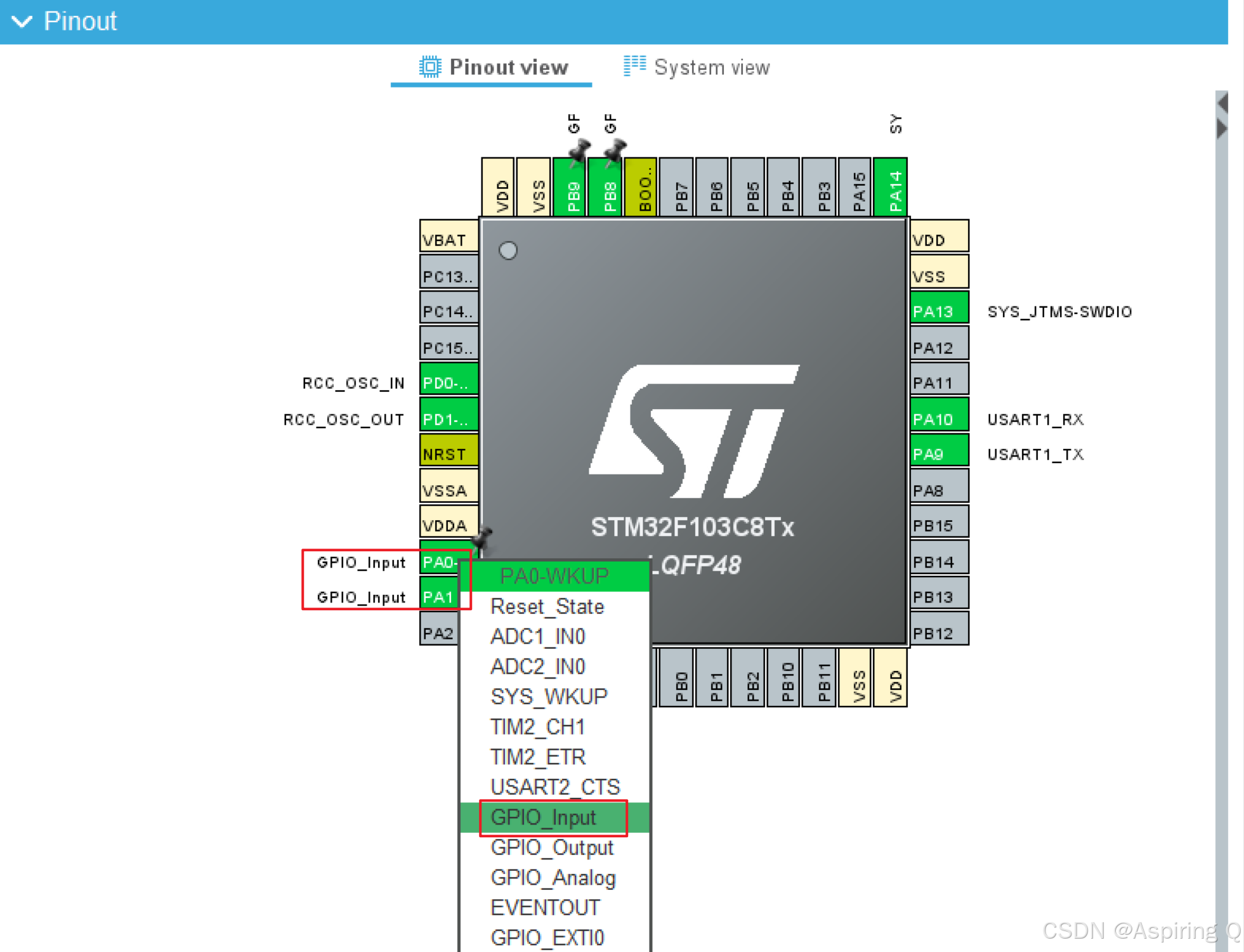
2.2 创建任务taskKEY1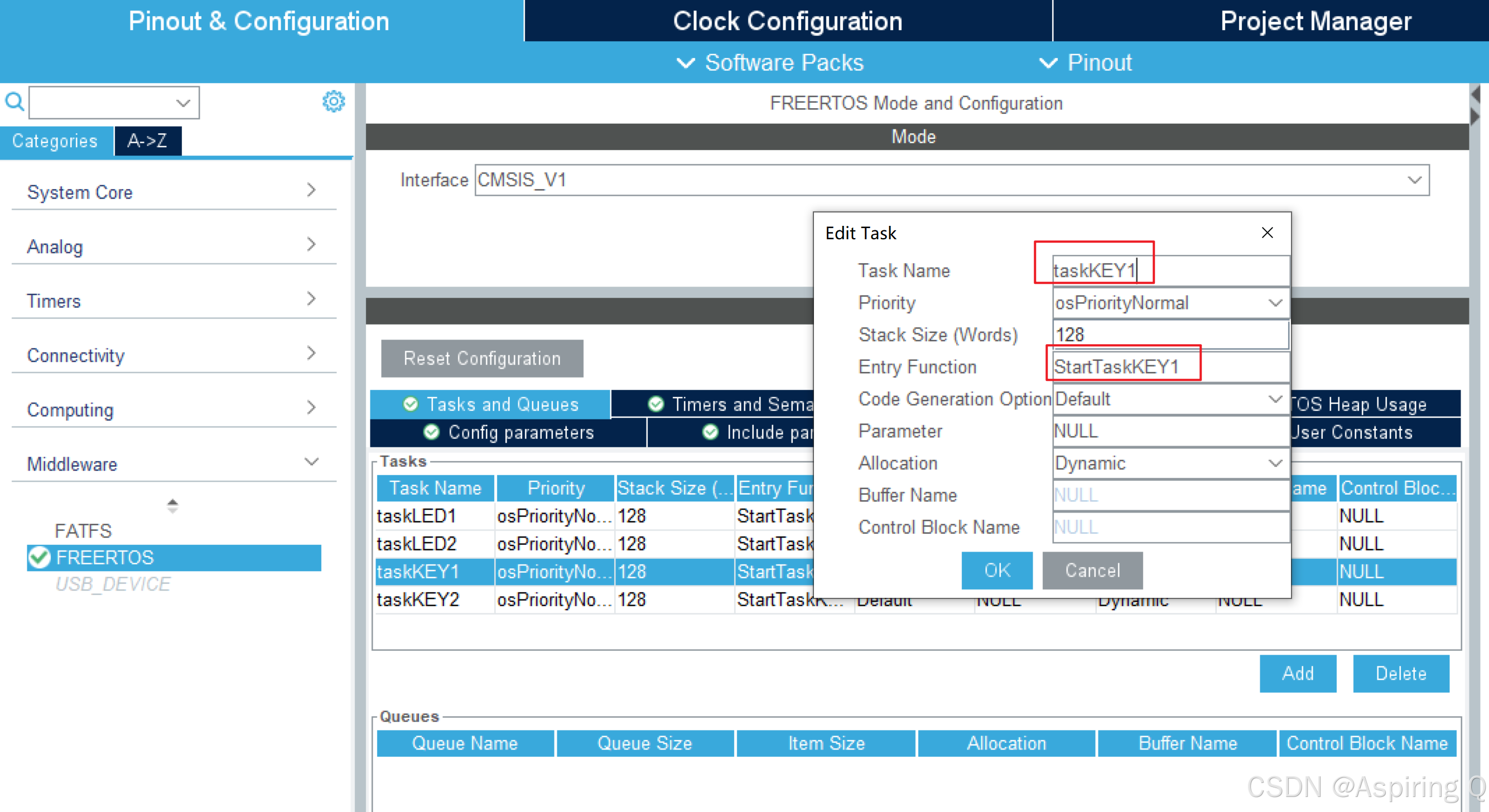
2.3 创建任务taskKEY2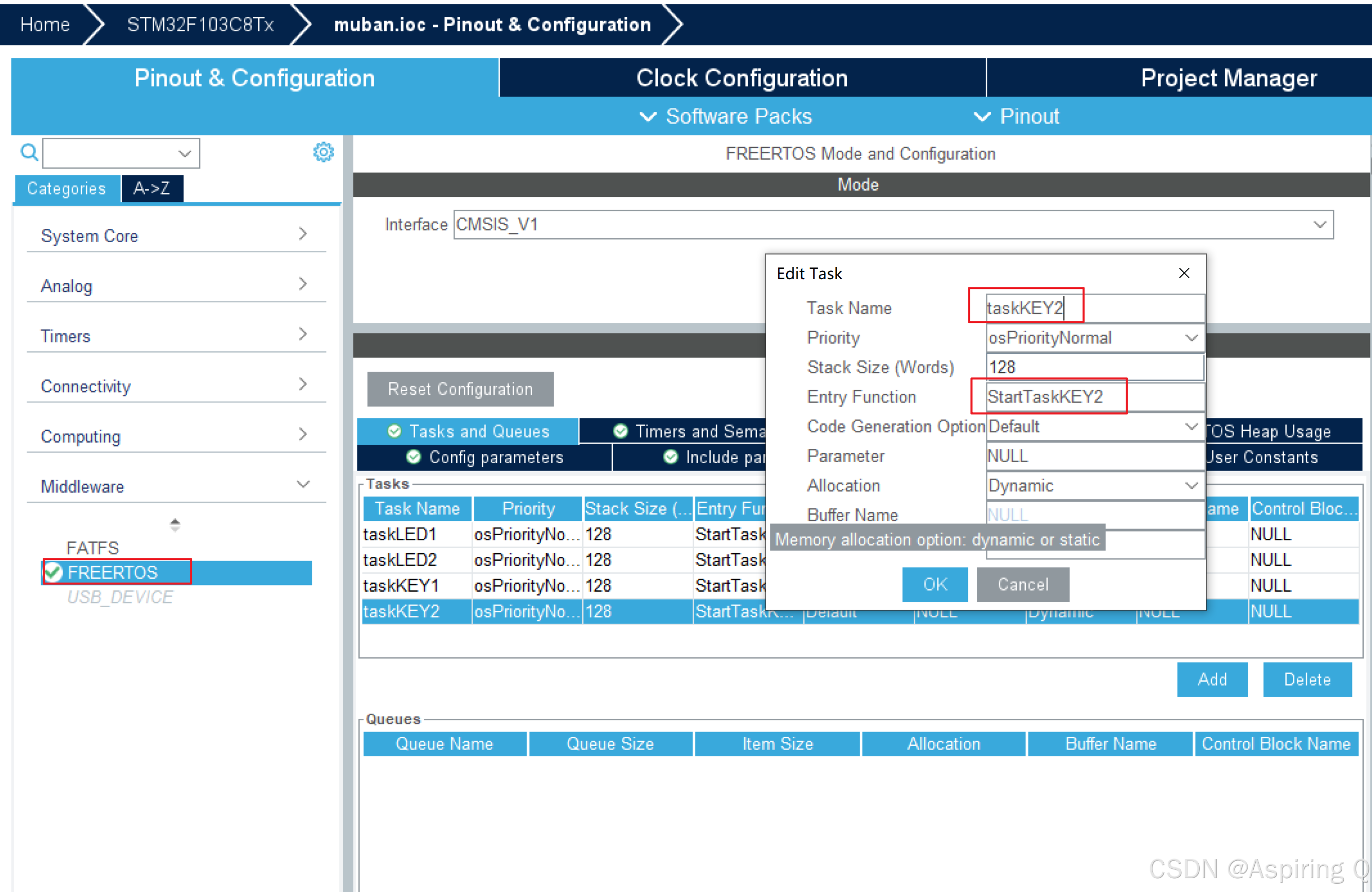
2.4 freertos.c中编写代码
/* USER CODE END Header_StartTaskLED1 */
void StartTaskLED1(void const * argument)
{
/* USER CODE BEGIN StartTaskLED1 */
/* Infinite loop */
for(;;)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_8);
osDelay(500);
}
/* USER CODE END StartTaskLED1 */
}
/* USER CODE END Header_StartTaskLED2 */
void StartTaskLED2(void const * argument)
{
/* USER CODE BEGIN StartTaskLED2 */
/* Infinite loop */
for(;;)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9);
osDelay(1000);
}
/* USER CODE END StartTaskLED2 */
}
/* USER CODE END Header_StartTaskKEY1 */
void StartTaskKEY1(void const * argument)
{
/* USER CODE BEGIN StartTaskKEY1 */
/* Infinite loop */
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(20);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) ==GPIO_PIN_RESET)
{
printf("KEY1按下!\r\n");
if(taskLED1Handle == NULL)
{
printf("任务1不存在,准备创建任务1\r\n");
osThreadDef(taskLED1, StartTaskLED1, osPriorityNormal, 0, 128);
taskLED1Handle = osThreadCreate(osThread(taskLED1), NULL);
if(taskLED1Handle != NULL)
printf("任务1创建完成!\r\n");
}
else
{
printf("删除任务\r\n");
osThreadTerminate(taskLED1Handle);
taskLED1Handle = NULL;
}
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskKEY1 */
}
/* USER CODE END Header_StartTaskKEY2 */
void StartTaskKEY2(void const * argument)
{
/* USER CODE BEGIN StartTaskKEY2 */
/* Infinite loop */
static int flag = 0;
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(20);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) ==GPIO_PIN_RESET)
{
printf("KEY2按下!\r\n");
if(flag == 0)
{
osThreadSuspend(taskLED2Handle);
printf("任务2已被暂停\r\n");
flag =1;
}
else
{
osThreadResume(taskLED2Handle);
printf("任务2已被恢复\r\n");
flag = 0;
}
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskKEY2 */
}
10 队列简介
(1)队列:又称消息队列,是一种常用于任务间通信的数据结构,队列可以在任务与任务间、中断和任务间传递信息。
队列项目:队列中的每一个数据;
队列长度:队列能够存储队列项目的最大数量;
(2)队列特点:1. 数据入队出队方式(通常采用先进先出(FIFO)的数据存储缓冲机制,也可以配置为后进先出(LIFO)方式)。
2.数据传递方式(采用实际值传递,即将数据拷贝到队列中进行传递,也可以传递指针,在传递较大的数据的时候采用指针传递)。
3.多任务访问(队列不属于某个任务,任何任务和中断都可以向队列发送/读取消息)。
4.出队、入队阻塞(当任务向一个队列发送消息时,可以指定一个阻塞时间,假设此时当队列已满无法入队)
阻塞时间如果设置为:0:直接返回不会等待;
0~port_MAX_DELAY:等待设定的阻塞时间,若在该时间内还无法入队,超时后直接返回不再等待;
port_MAX_DELAY:死等,一直等到可以入队为止。出队阻塞与入队阻塞类似;
(3)队列相关API函数:
1. 创建队列
例:QueueHandle_t xQueueCreate( UBaseType_t uxQueueLength,UBaseType_t uxItemSize );
参数:
uxQueueLength:队列可同时容纳的最大项目数 。
uxItemSize:存储队列中的每个数据项所需的大小(以字节为单位)。
返回值: 如果队列创建成功,则返回所创建队列的句柄 。 如果创建队列所需的内存无法分配 ,则返回 NULL。
2. 写队列
写队列函数:
xQueueSend() 往队列的尾部写入消息
xQueueSendToBack() 同 xQueueSend()
xQueueSendToFront() 往队列的头部写入消息
xQueueOverwrite() 覆写队列消息(只用于队列长度为 1 的情况)
xQueueSendFromISR() 在中断中往队列的尾部写入消息
xQueueSendToBackFromISR() 同 xQueueSendFromISR()
xQueueSendToFrontFromISR() 在中断中往队列的头部写入消息
xQueueOverwriteFromISR() 在中断中覆写队列消息(只用于队列长度为 1 的情况)
例:BaseType_t xQueueSend(QueueHandle_t xQueue,const void * pvItemToQueue,TickType_t xTicksToWait);
参数:
xQueue:队列的句柄,数据项将发送到此队列。
pvItemToQueue:待写入数据
xTicksToWait:阻塞超时时间
返回值:如果成功写入数据,返回 pdTRUE,否则返回 errQUEUE_FULL。
3. 读队列
读队列函数:
xQueueReceive() 从队列头部读取消息,并删除消息
xQueuePeek() 从队列头部读取消息,但是不删除消息
xQueueReceiveFromISR() 在中断中从队列头部读取消息,并删除消息
xQueuePeekFromISR() 在中断中从队列头部读取消息
例:BaseType_t xQueueReceive(QueueHandle_t xQueue,void *pvBuffer,TickType_t xTicksToWait);
参数:
xQueue:待读取的队列
pvItemToQueue:数据读取缓冲区
xTicksToWait:阻塞超时时间
返回值:成功返回 pdTRUE,否则返回 pdFALSE。
11 队列实操
(1)实验需求:创建一个队列,按下 KEY1 向队列发送数据,按下 KEY2 向队列读取数据。
(2)代码编写:复制模板工程(工程名:muban),点击进入CubeMX中创建2个任务及1个队列,按键1中写发送数据到队列,按键2中写从队列中读取数据。(工程名:queue_test)
2.1 PA0,PA两引脚设置为GPIO_Input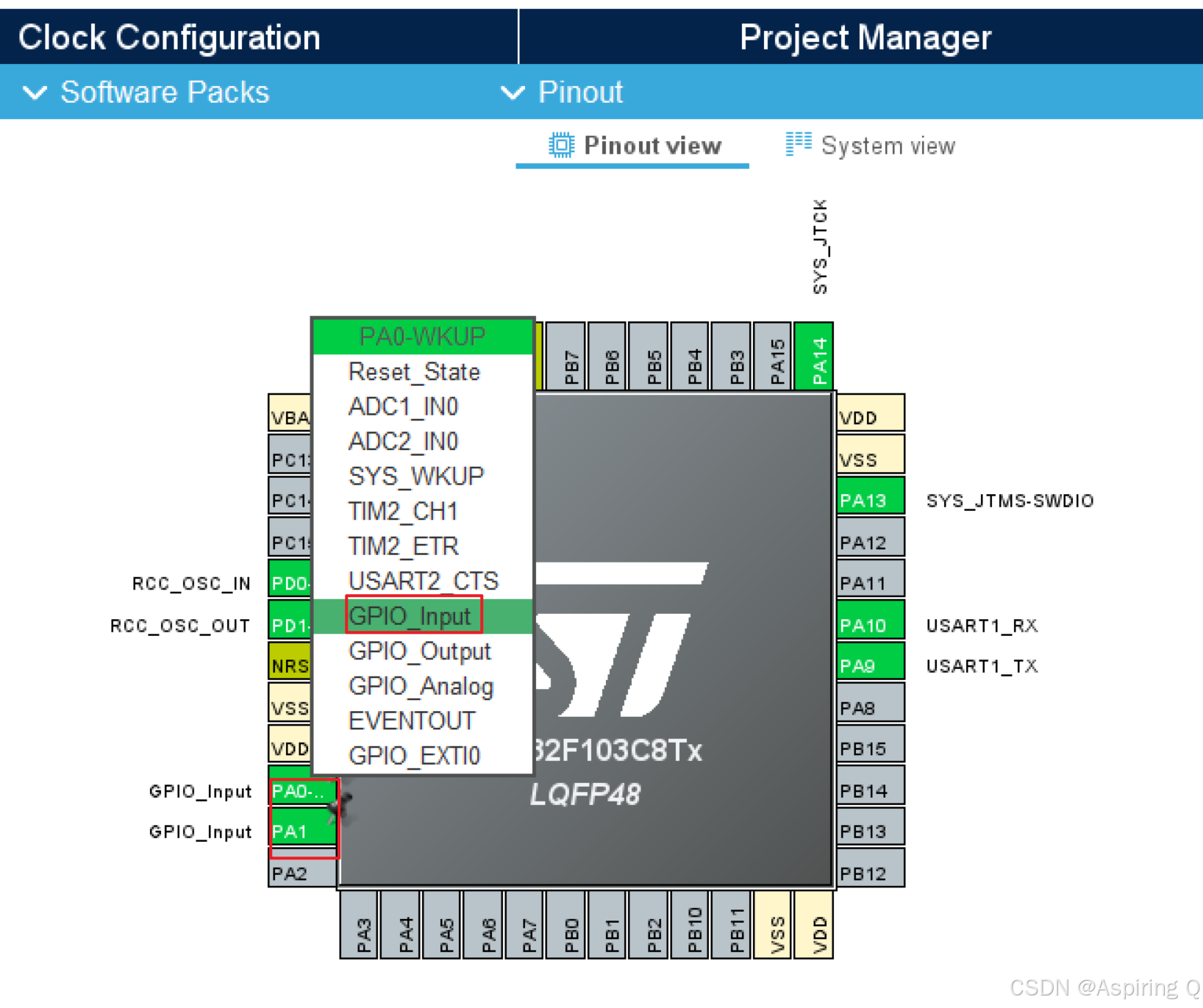
2.2 创建任务taskSend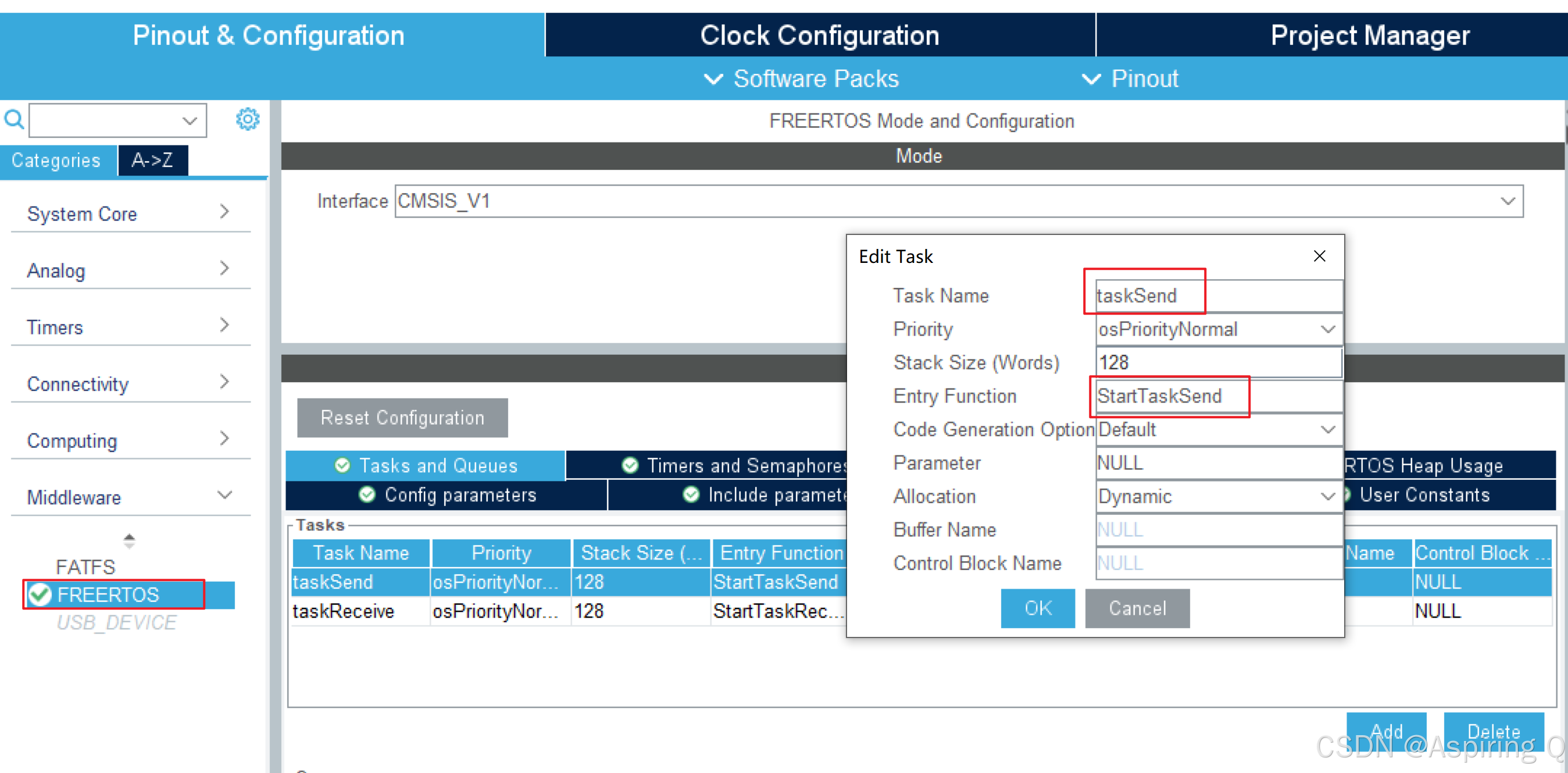
2.3 创建任务taskRecieve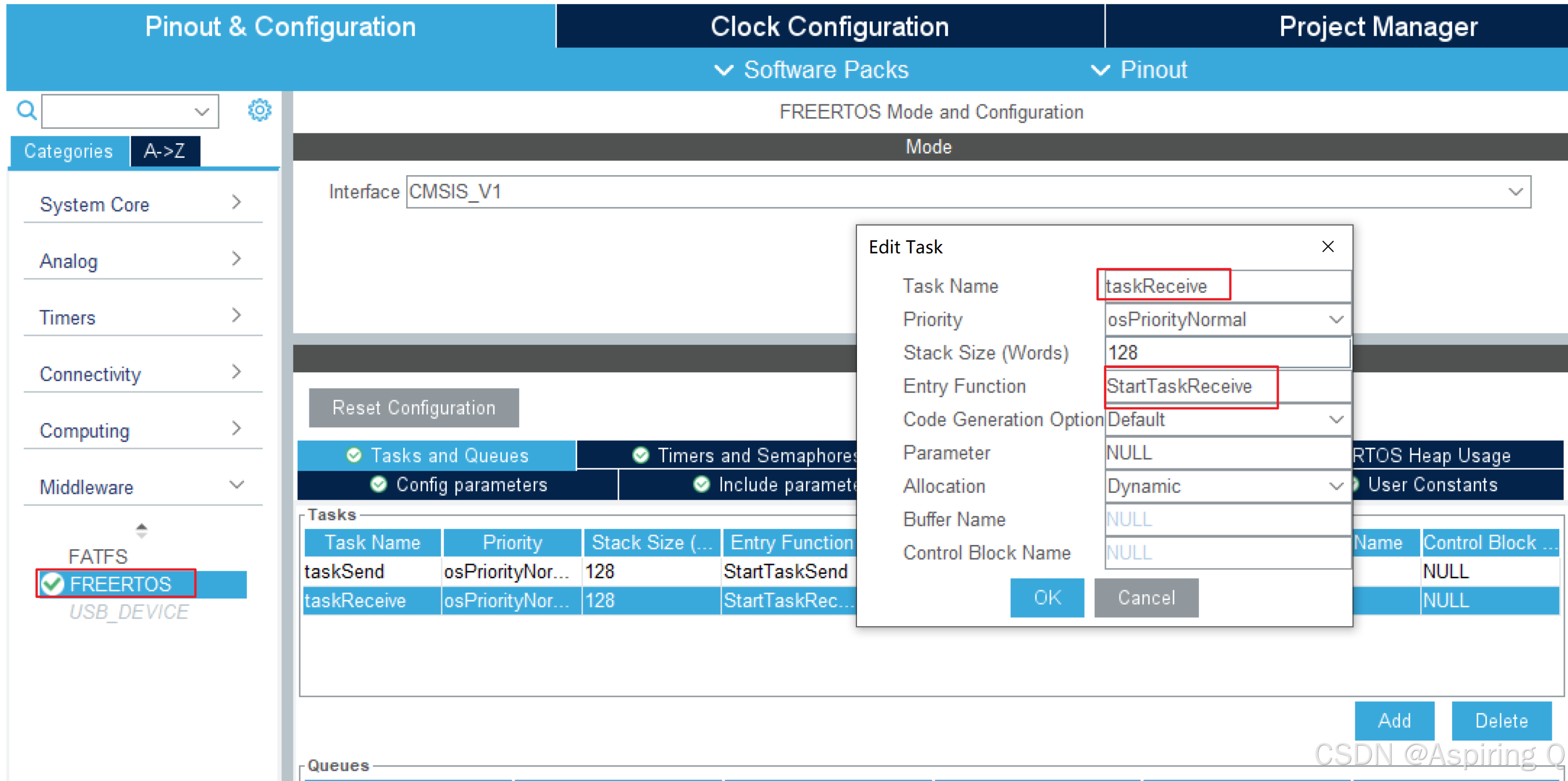
2.4 创建队列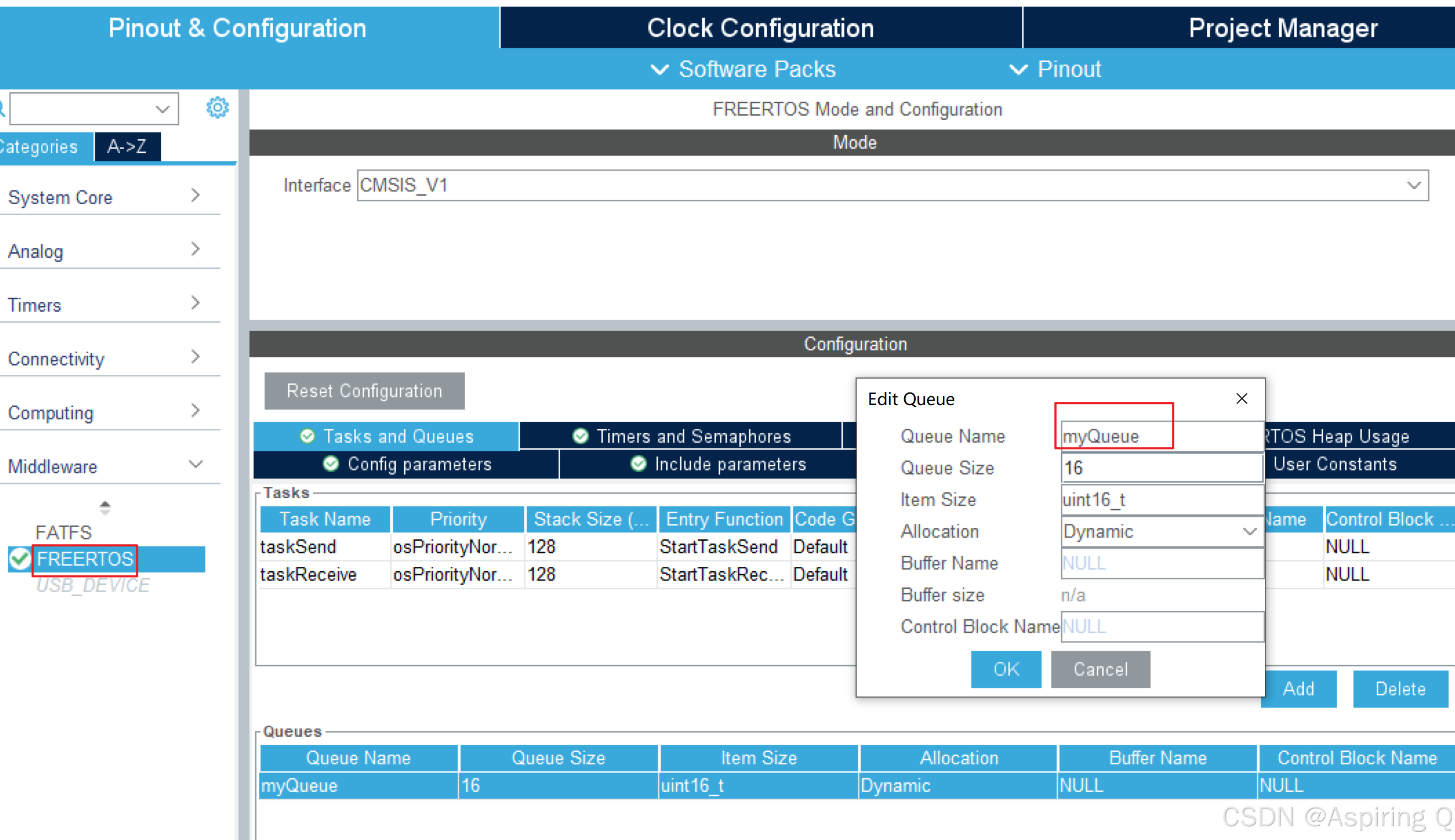
2.5 freertos.c中编写代码
/* USER CODE END Header_StartTaskSend */
void StartTaskSend(void const * argument)
{
/* USER CODE BEGIN StartTaskSend */
uint16_t buf = 100;
BaseType_t status;
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
status = xQueueSend(myQueueHandle, &buf, 0);
if (status == pdTRUE)
printf("写入队列成功,写入值%d\r\n", buf);
else
printf("写入队列失败\r\n");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskSend */
}
/* USER CODE END Header_StartTaskReceive */
void StartTaskReceive(void const * argument)
{
/* USER CODE BEGIN StartTaskReceive */
uint16_t buf;
BaseType_t status;
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
status = xQueueReceive(myQueueHandle, &buf, 0);
if (status == pdTRUE)
printf("读取队列成功,读出值%d\r\n", buf);
else
printf("读取队列失败\r\n");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskReceive */
}
12 二值信号量简介
(1)信号量(Semaphore)是在多任务环境下使用的一种机制,是可以用来保证两个或多个关键代码段不被并发调用。
二值信号量:一个长度为1,大小为零的队列,只有0和1两种状态;通常情况下,我们用它来进行互斥访问或任务同步。
(2)二值信号量函数:
xSemaphoreCreateBinary() 使用动态方式创建二值信号量
xSemaphoreCreateBinaryStatic() 使用静态方式创建二值信号量
xSemaphoreGive() 释放信号量
xSemaphoreGiveFromISR() 在中断中释放信号量
xSemaphoreTake() 获取信号量
xSemaphoreTakeFromISR() 在中断中获取信号量
创建二值信号量:SemaphoreHandle_t xSemaphoreCreateBinary( void )
参数:无
返回值:成功,返回对应二值信号量的句柄;失败,返回 NULL 。
释放二值信号量:BaseType_t xSemaphoreGive( SemaphoreHandle_t xSemaphore )
参数:xSemaphore:要释放的信号量句柄
返回值:成功,返回 pdPASS ;失败,返回 errQUEUE_FULL 。
获取二值信号量:BaseType_t xSemaphoreTake( SemaphoreHandle_t xSemaphore,TickType_t xTicksToWait );
参数:xSemaphore:要获取的信号量句柄
xTicksToWait:超时时间,0 表示不超时,portMAX_DELAY表示卡死等待;
返回值:成功,返回 pdPASS ;失败,返回 errQUEUE_FULL 。
13 二值信号量实操
(1)代码编写:复制模板工程(工程名:muban),点击进入CubeMX中创建2个任务及1个二值信号量,按键1中释放二值信号量,按键2中获取二值信号量。(项目名:semaphore_binary_test)
1.1 PA0,PA1引脚设置为GPIO_Input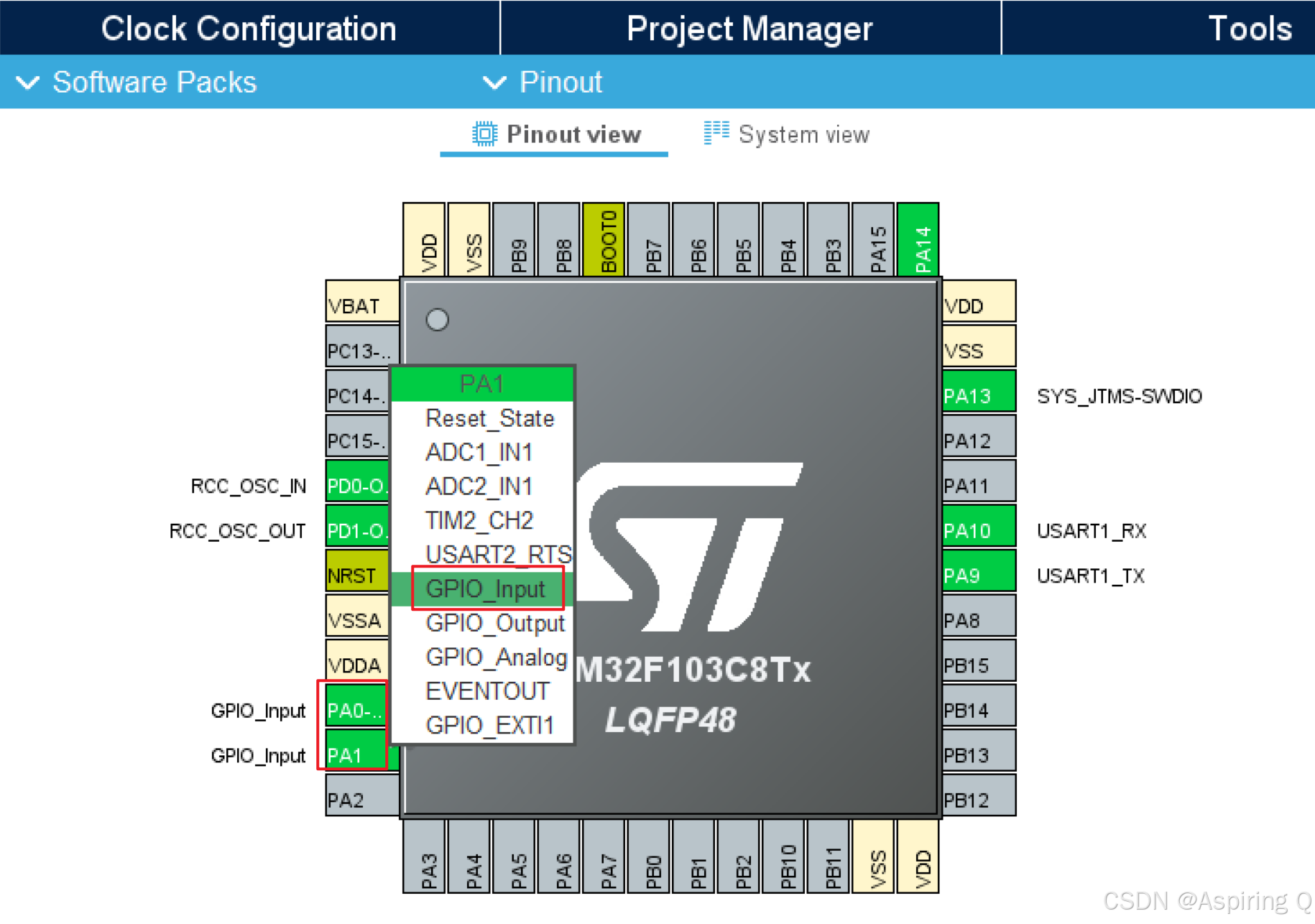
1.2 创建任务taskGive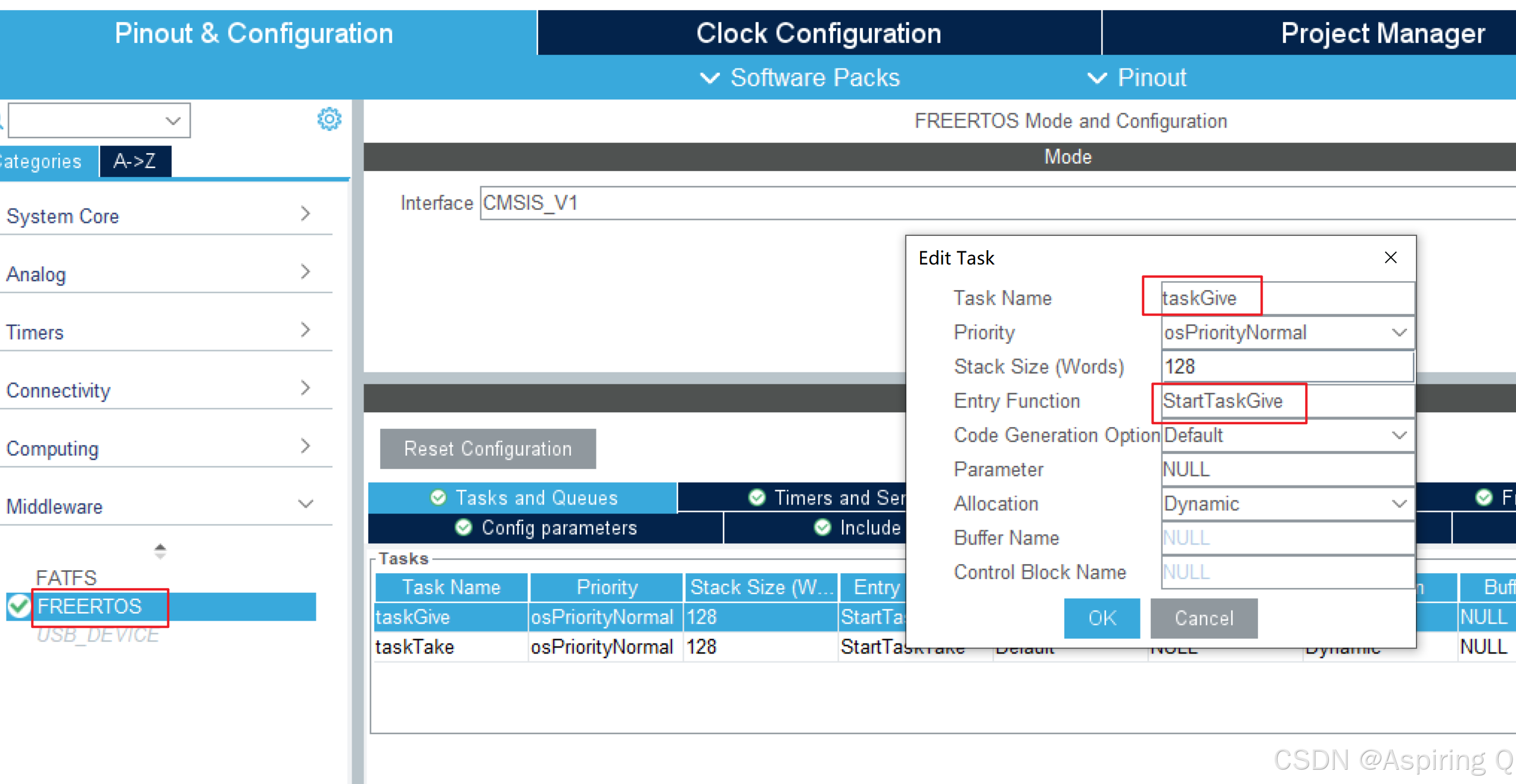
1.3 创建任务taskTake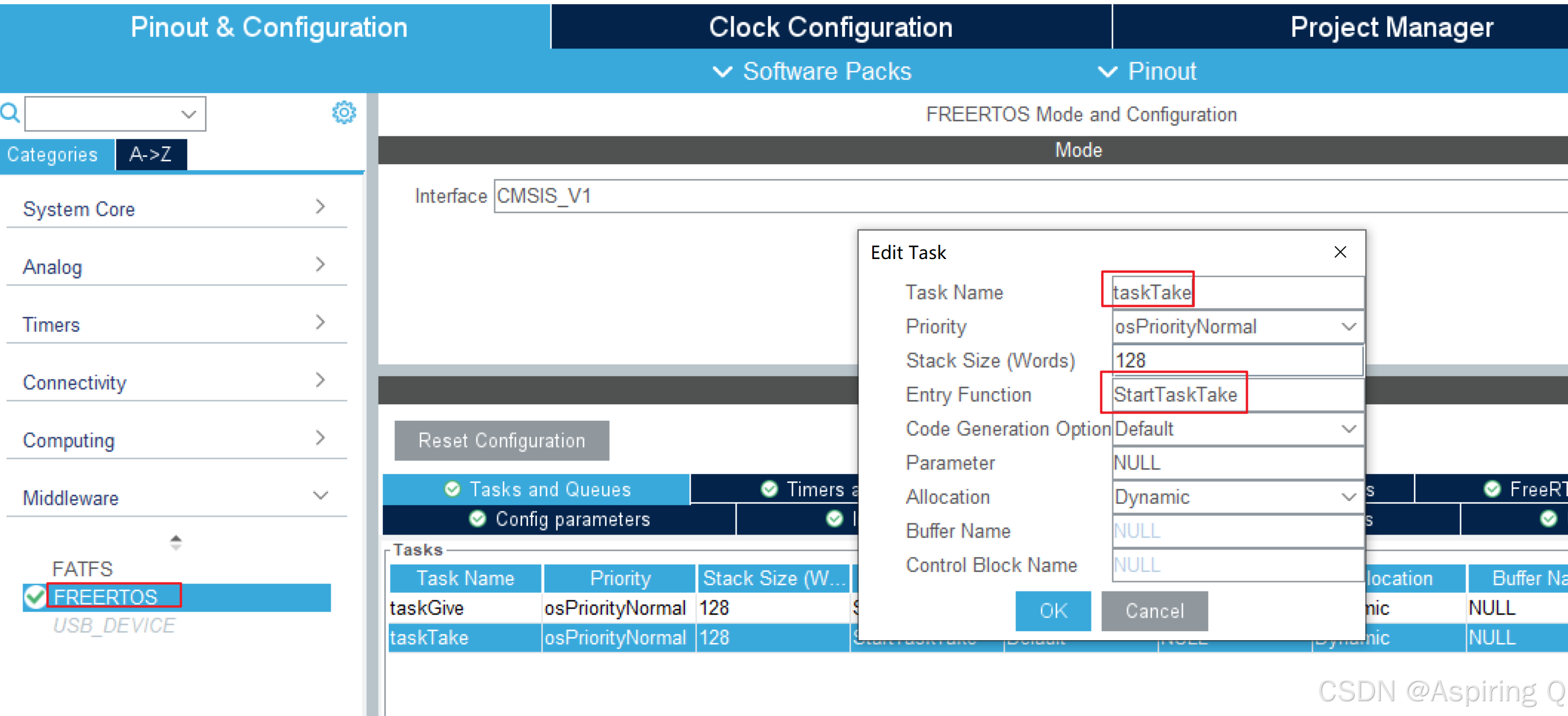
1.4 创建二值信号量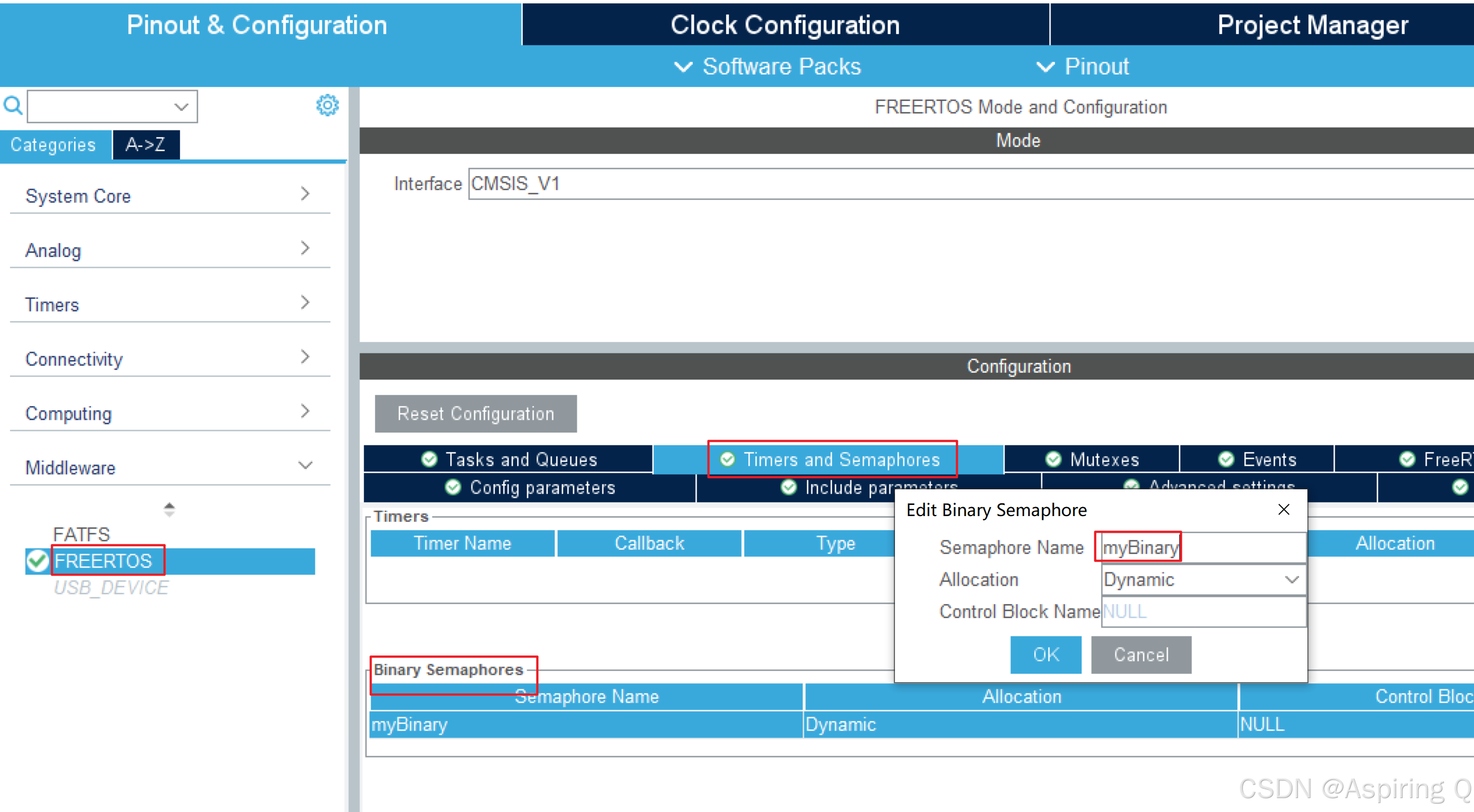
1.5 freertos.c中编写代码
//osSemaphoreDef(myBinary);
//myBinaryHandle = osSemaphoreCreate(osSemaphore(myBinary), 1);
myBinaryHandle = xSemaphoreCreateBinary();
osThreadDef(taskGive, StartTaskGive, osPriorityNormal, 0, 128);
taskGiveHandle = osThreadCreate(osThread(taskGive), NULL);
/* definition and creation of taskTake */
osThreadDef(taskTake, StartTaskTake, osPriorityNormal, 0, 128);
taskTakeHandle = osThreadCreate(osThread(taskTake), NULL);
/* USER CODE END Header_StartTaskGive */
void StartTaskGive(void const * argument)
{
/* USER CODE BEGIN StartTaskGive */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
if (xSemaphoreGive(myBinaryHandle) == pdTRUE)
printf("二值信号量放入成功\r\n");
else
printf("二值信号量放入失败\r\n");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskGive */
}
/* USER CODE END Header_StartTaskTake */
void StartTaskTake(void const * argument)
{
/* USER CODE BEGIN StartTaskTake */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
if (xSemaphoreTake(myBinaryHandle, portMAX_DELAY ) == pdTRUE)
printf("二值信号量获取成功\r\n");
else
printf("二值信号量获取失败\r\n");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskTake */
}
14 计数型信号量简介及实操
(1)计数型信号量:计数型信号量相当于队列长度大于1的队列,因此计数型信号量能够容纳多个资源。
(2)计数型信号量函数:
xSemaphoreCreateCounting() 使用动态方法创建计数型信号量。
xSemaphoreCreateCountingStatic() 使用静态方法创建计数型信号量
uxSemaphoreGetCount() 获取信号量的计数值
例:SemaphoreHandle_t xSemaphoreCreateCounting( UBaseType_t uxMaxCount,UBaseType_t uxInitialCount);
参数:uxMaxCount:可以达到的最大计数值
uxInitialCount:创建信号量时分配给信号量的计数值
返回值:成功,返回对应计数型信号量的句柄;失败,返回 NULL 。
(3)实验需求:创建一个计数型信号量,按下 KEY1 则释放信号量,按下 KEY2 获取信号量。
代码编写:参考二值信号量实操(项目名:semaphore_binary_test),点击进入CubeMX中开启计数型信号量,删除二值信号量,新建计数型信号量。函数中将创建二值信号量修改为创建计数型信号量。(项目名:semaphore_counting_test)
3.1 使用计数型信号量配置为Enabled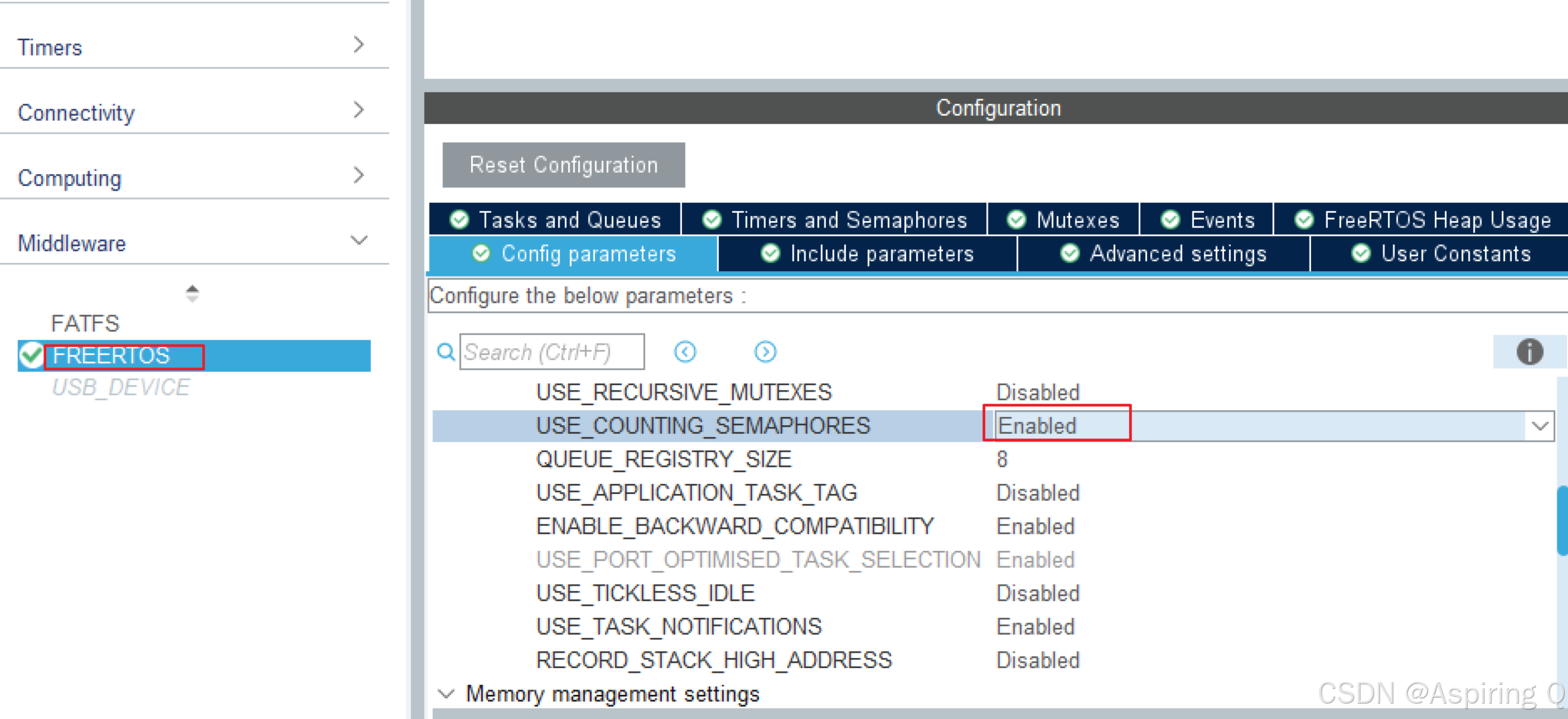
3.2 创建计数型信号量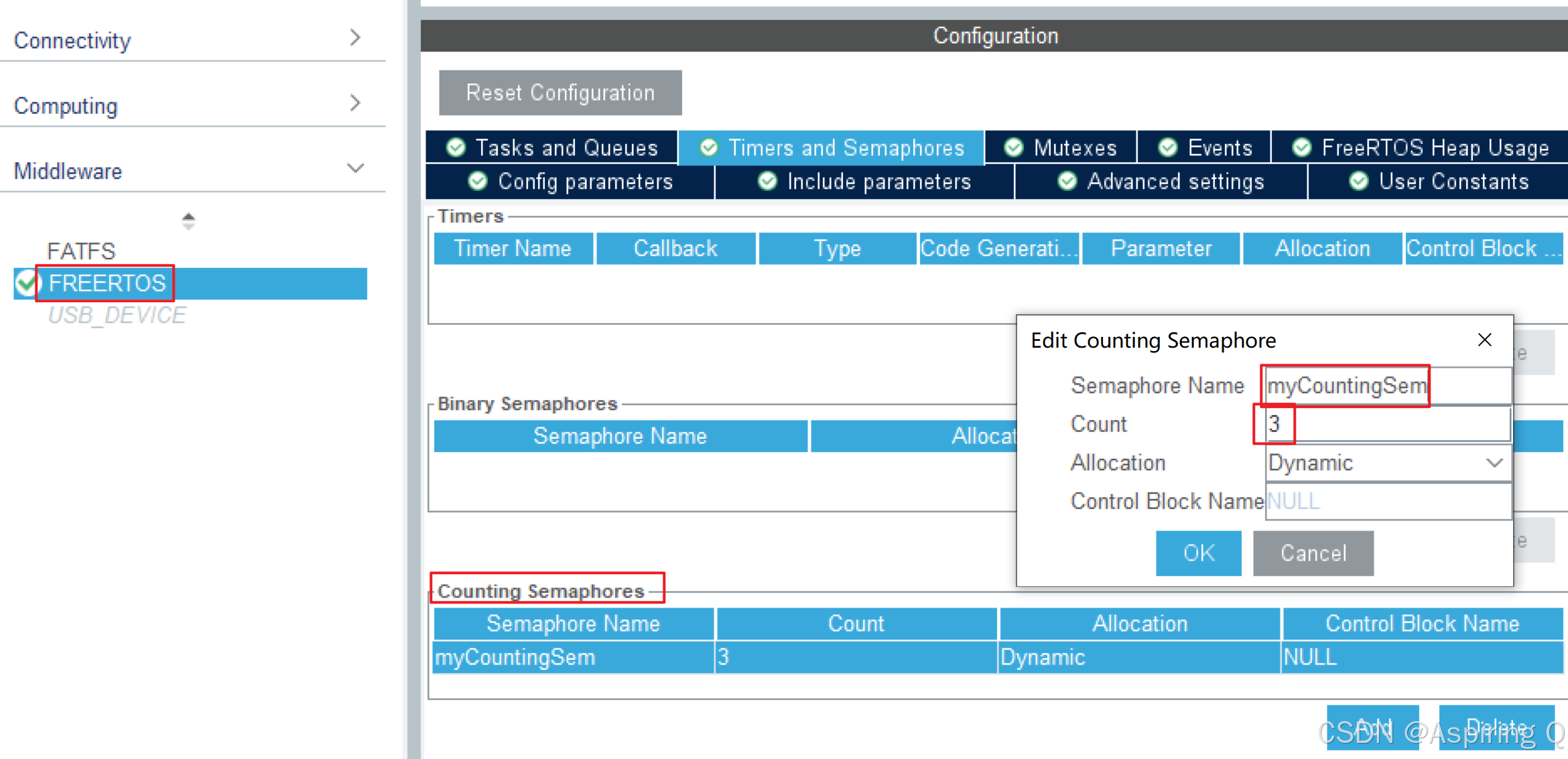
3.3 freertos.c中编写代码
// osSemaphoreDef(myCountingSem);
// myCountingSemHandle = osSemaphoreCreate(osSemaphore(myCountingSem), 3);
myCountingSemHandle= xSemaphoreCreateCounting(3,0);
/* USER CODE END Header_StartTaskGive */
void StartTaskGive(void const * argument)
{
/* USER CODE BEGIN StartTaskGive */
/* Infinite loop */
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(20);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) ==GPIO_PIN_RESET)
{
if(xSemaphoreGive(myCountingSemHandle) == pdPASS)
printf("计数型信号量释放成功\r\n");
else
printf("计数型信号量释放失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskGive */
}
/* USER CODE END Header_StartTaskTake */
void StartTaskTake(void const * argument)
{
/* USER CODE BEGIN StartTaskTake */
/* Infinite loop */
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(20);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) ==GPIO_PIN_RESET)
{
if(xSemaphoreTake(myCountingSemHandle,0) == pdPASS)
printf("计数型信号量获取成功\r\n");
else
printf("计数型信号量获取失败\r\n");
}
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskTake */
}
15 互斥量简介
(1)互斥型信号量和二值型信号量非常相似,但是从功能上二值型信号量用于同步,而互斥型信号量用于资源保护。
互斥型信号量和二值型信号量还有一个最大的区别,互斥型信号量可以有效解决优先级反转现象。
(2)优先级倒置或反转:例,系统中有3个不同优先级的任务H/M/L,最高优先级任务H和最低优先级任务L通过信号量机制,共享资源。目前任务L占有资源,锁定了信号量,Task H运行后将被阻塞,
直到TaskL释放信号量后,Task H才能够退出阻塞状态继续运行。但是Task H在等待Task L释放信号量的过程中,中等优先级任务M抢占了任务L,从而延迟了信号量的释放时间,
导致Task H阻塞了更长时间,这种现象称为优先级倒置或反转。
(即H/M/L这3个优先级任务,H,L共用一个信号量,L执行H被阻塞,由于M优先级高于L,L信号量还未释放完,M抢占,所以先执行M,再执行完L,再执行H)
(3)优先级继承:当一个互斥信号量正在被一个低优先级的任务持有时, 如果此时有个高优先级的任务也尝试获取这个互斥信号量,那么这个高优先级的任务就会被阻塞。不过这个高优先级的任务
会将低优先级任务的优先级提升到与自己相同的优先级。(即H/M/L这3个优先级任务,H,L共用一个互斥信号量,那么L优先级提升到跟H一样,先执行L,再执行H,再执行M)。
优先级继承并不能完全的消除优先级翻转的问题,它只是尽可能的降低优先级翻转带来的影响。
(4)互斥量相关函数:
xSemaphoreCreateMutex() 使用动态方法创建互斥信号量。
xSemaphoreCreateMutexStatic() 使用静态方法创建互斥信号量。
例:SemaphoreHandle_t xSemaphoreCreateMutex( void )
参数:无
返回值:成功,返回对应互斥量的句柄;失败,返回 NULL 。
16 互斥量实操
(1)实验需求:1. 演示优先级翻转;2. 使用互斥量优化优先级翻转问题
(2)代码编写:1.复制模板工程,点击进入CubeMX中创建3个优先级分别为高,中,低的任务及1个二值信号量,高,低优先级任务共用一个二值信号量。
2.1 创建任务taskH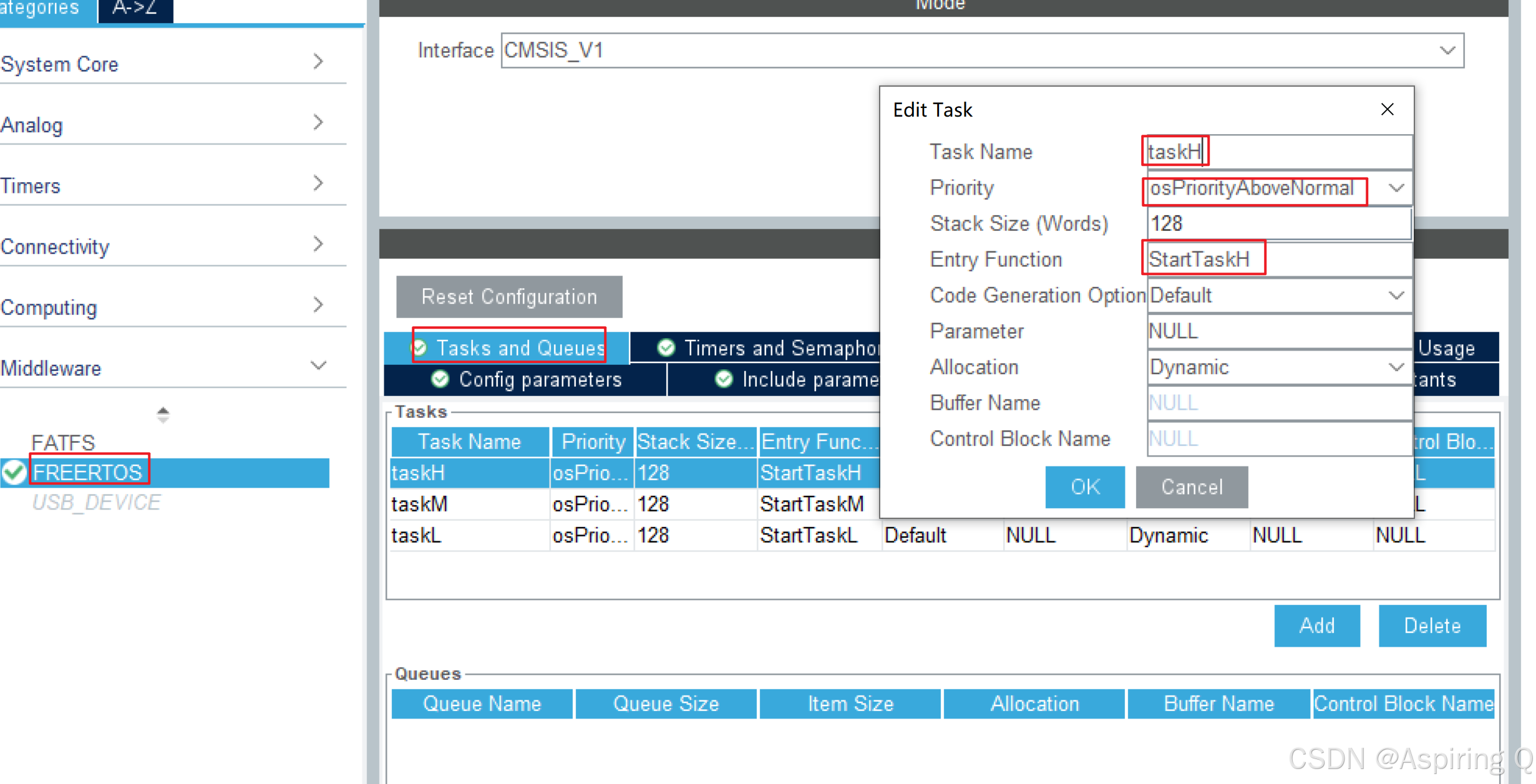
2.2 创建任务taskM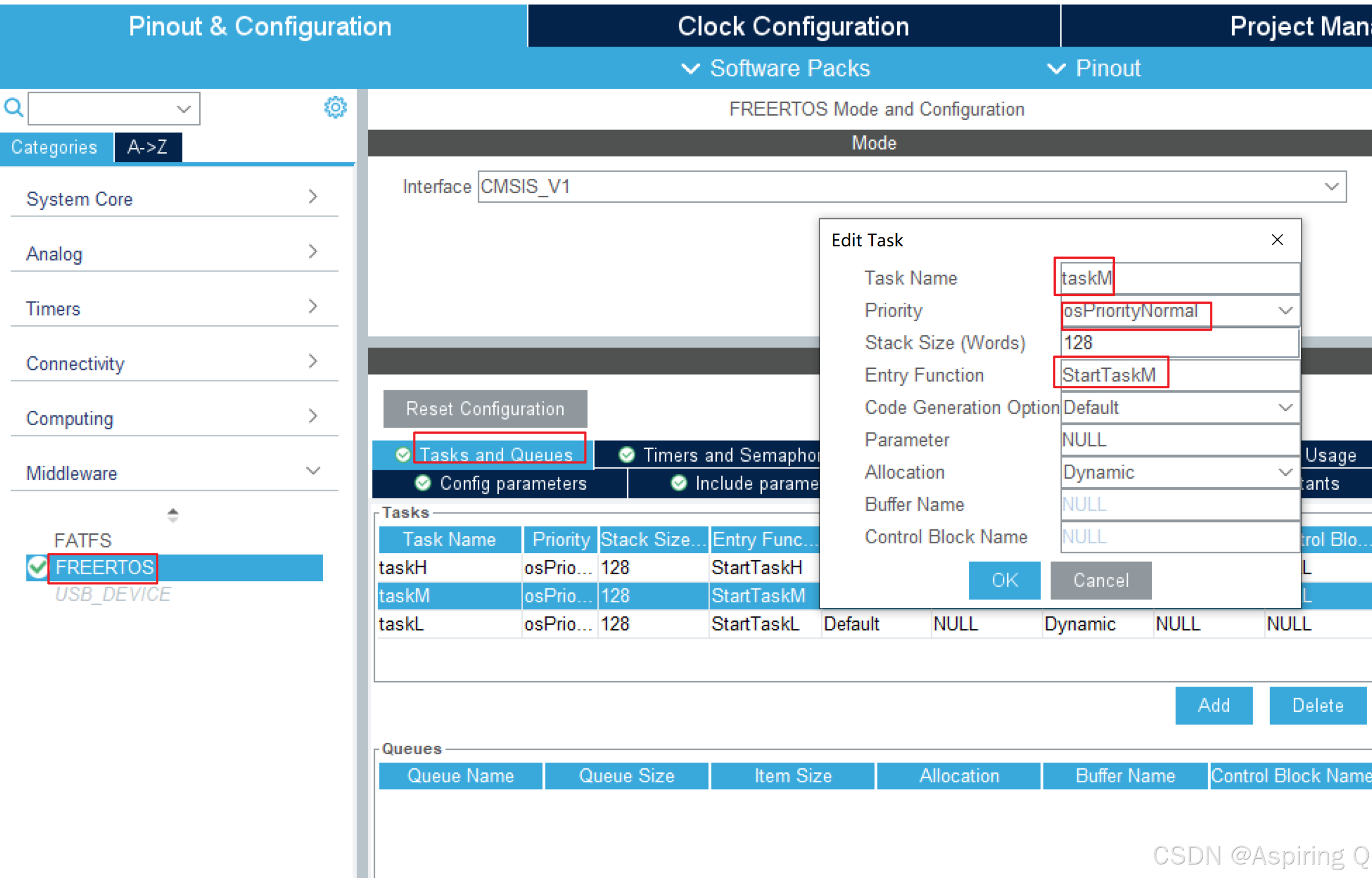
2.3 创建任务taskL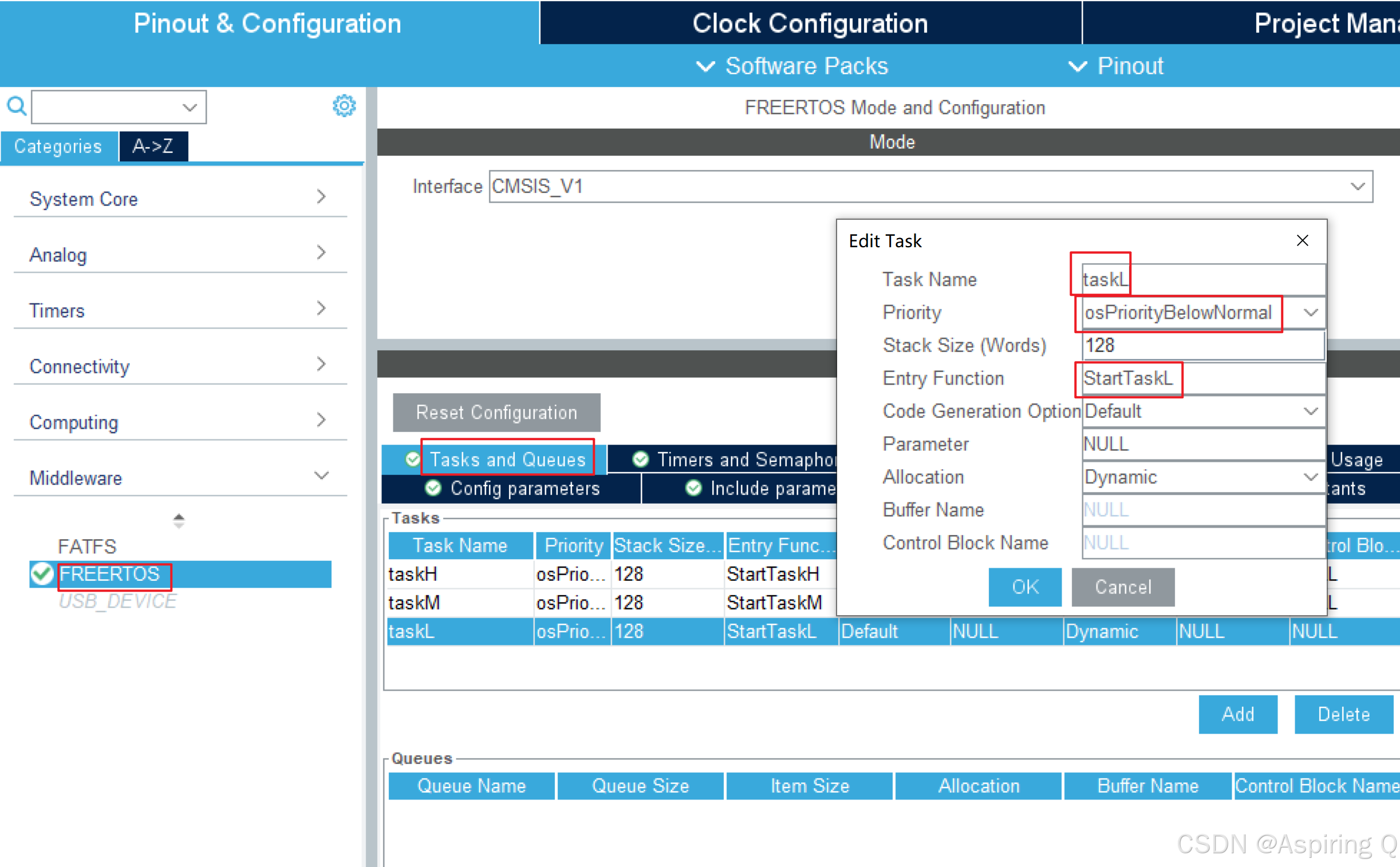
2.4 创建二值信号量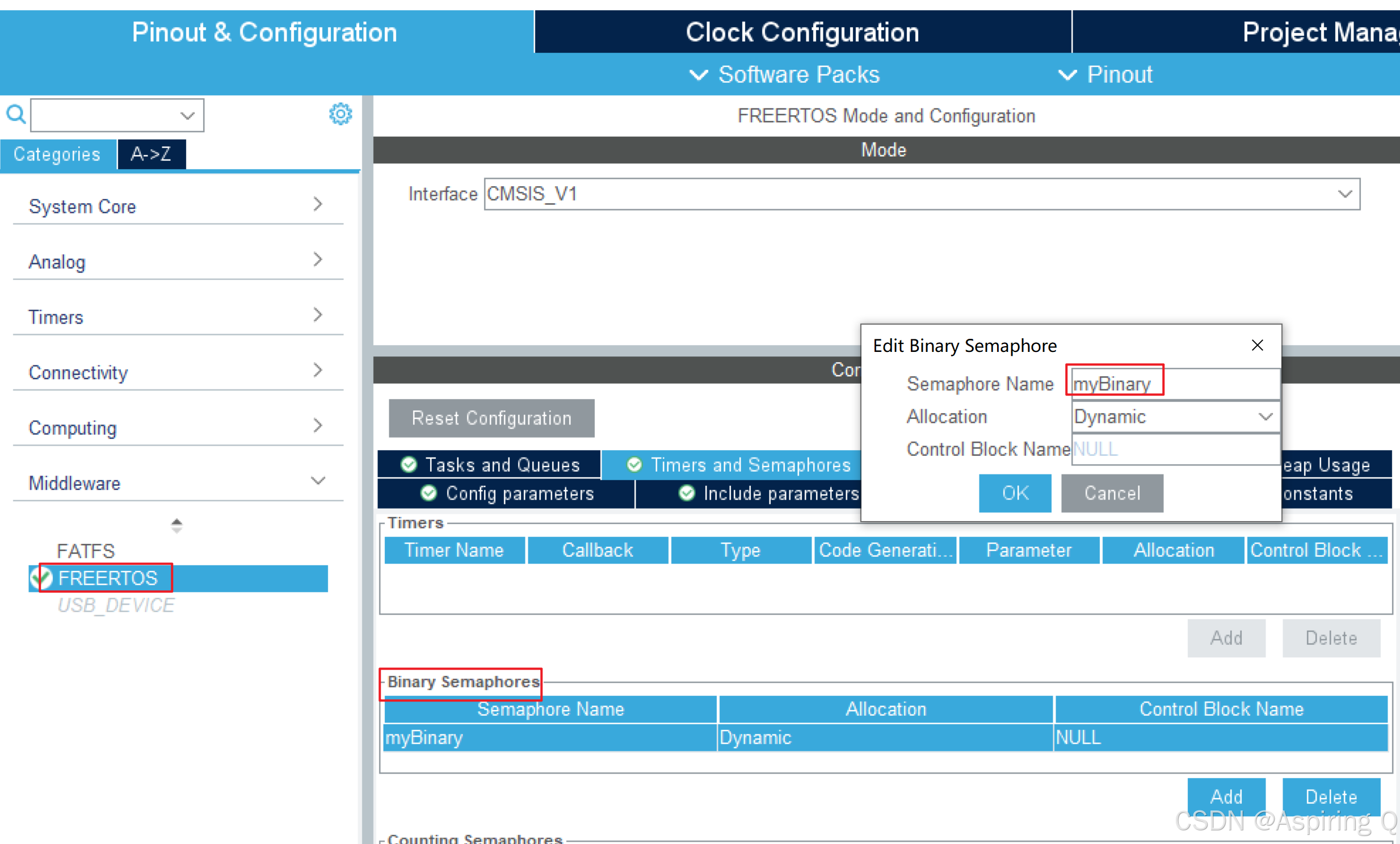
2.5 在freertos.c中编写代码
/* USER CODE END Header_StartTaskH */
void StartTaskH(void const * argument)
{
/* USER CODE BEGIN StartTaskH */
/* Infinite loop */
for(;;)
{
xSemaphoreTake(myBinarySemHandle,portMAX_DELAY);
printf("taskH:获取信号量中\r\n");
HAL_Delay(1000);
printf("taskH:获取到了信号量\r\n");
xSemaphoreGive(myBinarySemHandle);
osDelay(1000);
}
/* USER CODE END StartTaskH */
}
/* USER CODE END Header_StartTaskM */
void StartTaskM(void const * argument)
{
/* USER CODE BEGIN StartTaskM */
/* Infinite loop */
for(;;)
{
printf("taskM:路过而已\r\n");
osDelay(1000);
}
/* USER CODE END StartTaskM */
}
/* USER CODE END Header_StartTaskL */
void StartTaskL(void const * argument)
{
/* USER CODE BEGIN StartTaskL */
/* Infinite loop */
for(;;)
{
xSemaphoreTake(myBinarySemHandle,portMAX_DELAY);
printf("taskL:获取信号量中\r\n");
HAL_Delay(3000);
printf("taskL:获取到了信号量\r\n");
xSemaphoreGive(myBinarySemHandle);
osDelay(1000);
}
/* USER CODE END StartTaskL */
}
2.6 演示优先级翻转,taskL被taskM抢占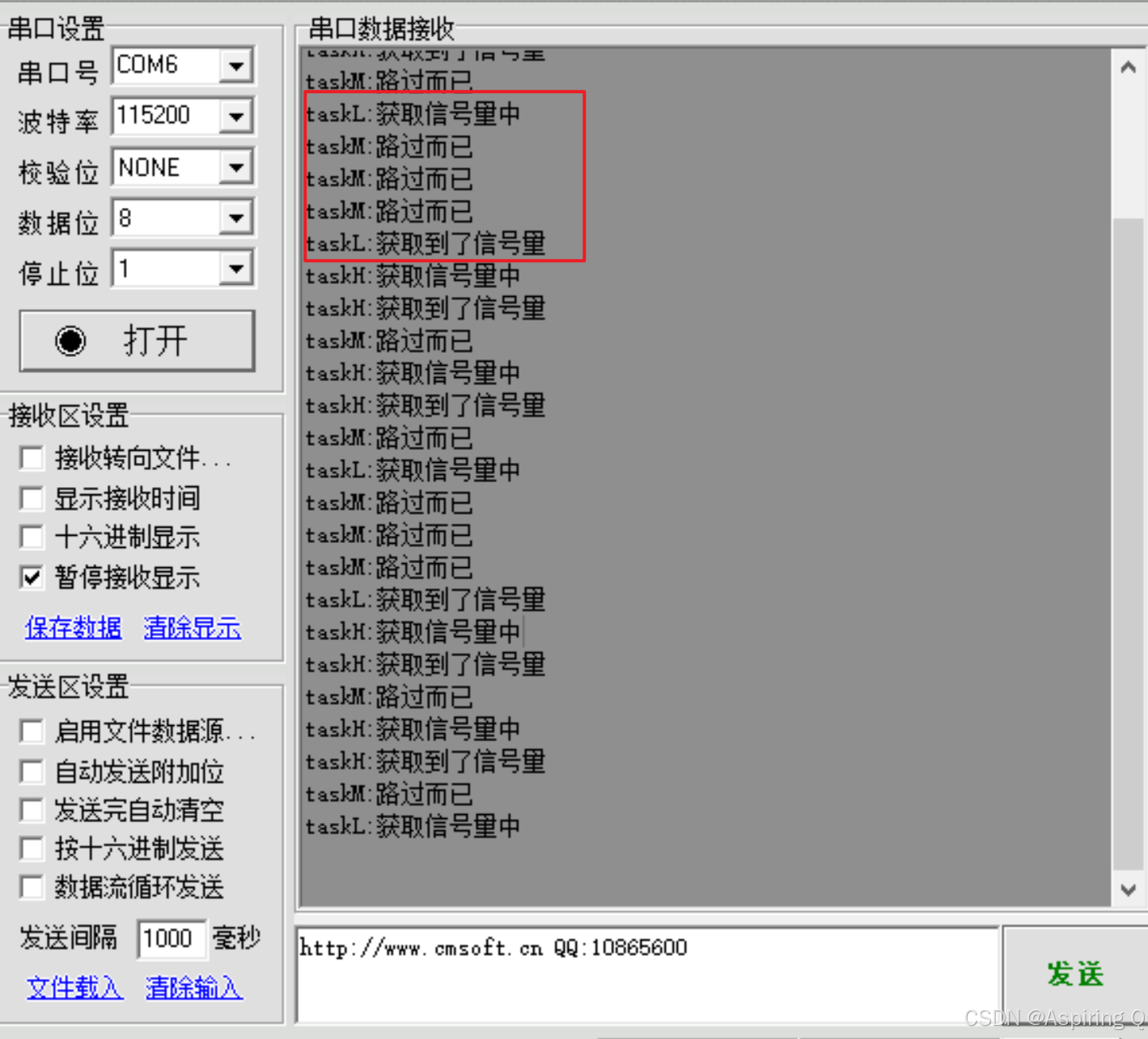
2.复制模板工程,点击进入CubeMX中创建3个优先级分别为高,中,低的任务及1个互斥信号量,高,低优先级任务共用一个互斥信号量。
2.1 将上述实验创建的二值信号量删除,创建互斥信号量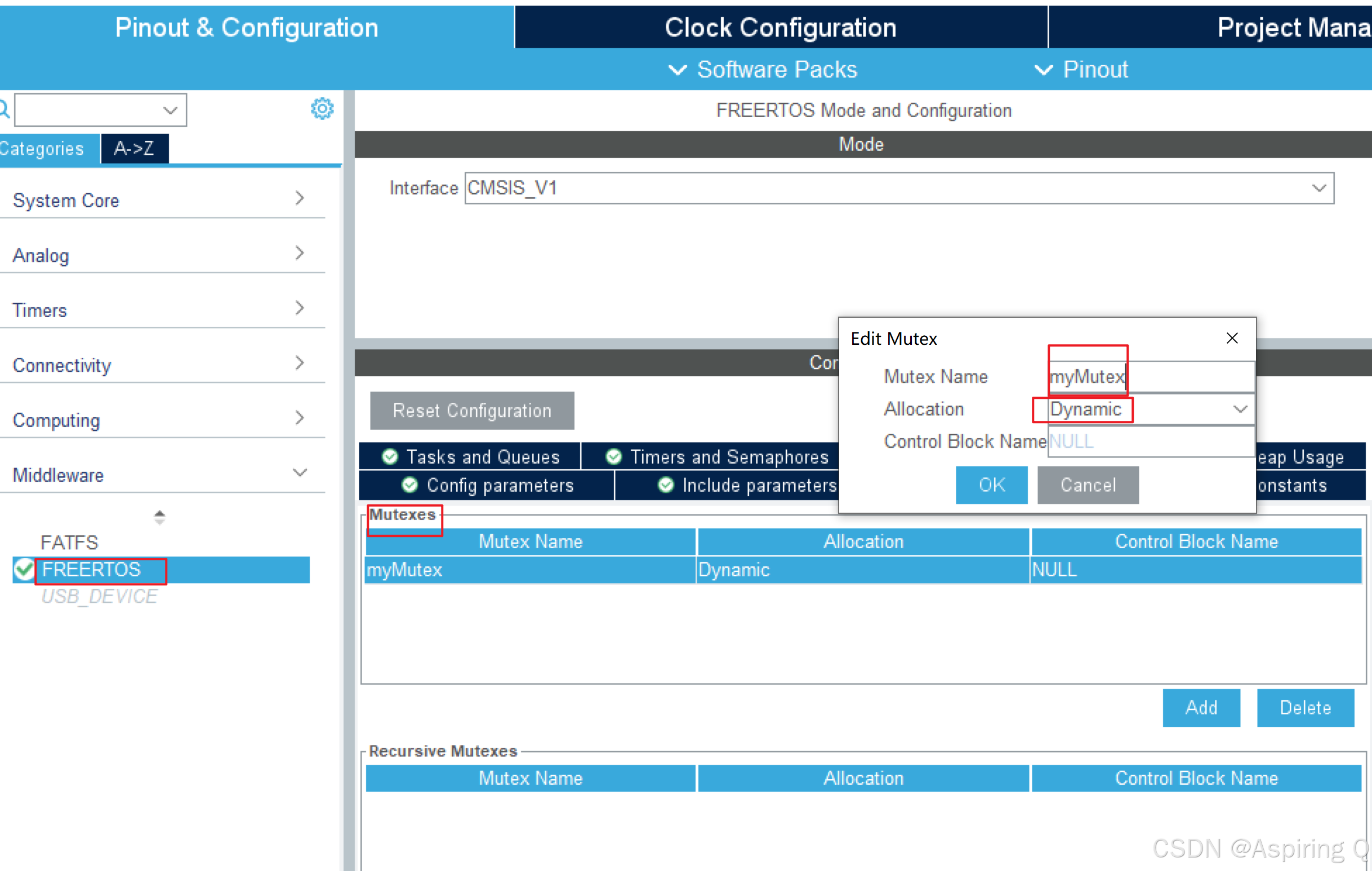
2.2 在freertos.c中编写代码
/* USER CODE END Header_StartTaskH */
void StartTaskH(void const * argument)
{
/* USER CODE BEGIN StartTaskH */
/* Infinite loop */
for(;;)
{
xSemaphoreTake(myMutexHandle,portMAX_DELAY);
printf("taskH:获取信号量中\r\n");
HAL_Delay(1000);
printf("taskH:获取到了信号量\r\n");
xSemaphoreGive(myMutexHandle);
osDelay(1000);
}
/* USER CODE END StartTaskH */
}
/* USER CODE END Header_StartTaskM */
void StartTaskM(void const * argument)
{
/* USER CODE BEGIN StartTaskM */
/* Infinite loop */
for(;;)
{
printf("taskM:路过而已\r\n");
osDelay(1000);
}
/* USER CODE END StartTaskM */
}
/* USER CODE END Header_StartTaskL */
void StartTaskL(void const * argument)
{
/* USER CODE BEGIN StartTaskL */
/* Infinite loop */
for(;;)
{
xSemaphoreTake(myMutexHandle,portMAX_DELAY);
printf("taskL:获取信号量中\r\n");
HAL_Delay(3000);
printf("taskL:获取到了信号量\r\n");
xSemaphoreGive(myMutexHandle);
osDelay(1000);
}
/* USER CODE END StartTaskL */
}
2.3 使用互斥量优化优先级翻转问题,无taskL抢占taskM的现象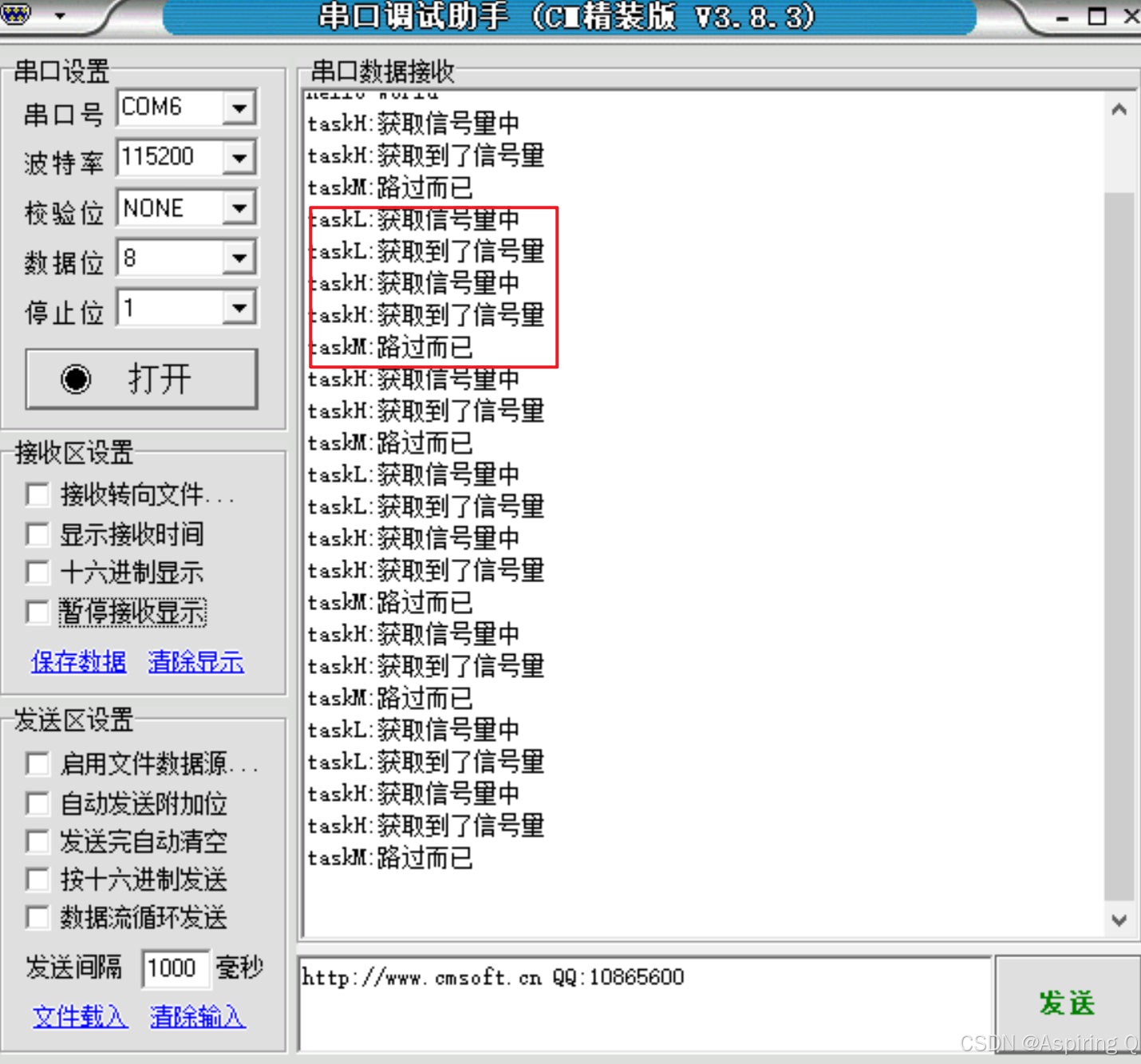
17 事件标志组简介
(1)事件标志位:表明某个事件是否发生;通常按位表示,每一位表示一个事件;
(2)事件标志组:一组事件标志位的集合;本质是一个16位或32位无符号的数据类型 EventBits_t ,由 configUSE_16_BIT_TICKS决定。
其中32位无符号的数据类型变量来存储事件标志,但其中的高8位用作存储事件标志组的控制信息,低24位用作存储事件标志。
(3)事件标志组相关函数:
xEventGroupCreate() 使用动态方式创建事件标志组
xEventGroupCreateStatic() 使用静态方式创建事件标志组
xEventGroupClearBits() 清零事件标志位
xEventGroupClearBitsFromISR() 在中断中清零事件标志位
xEventGroupSetBits() 设置事件标志位
xEventGroupSetBitsFromISR() 在中断中设置事件标志位
xEventGroupWaitBits() 等待事件标志位
创建事件标志组:EventGroupHandle_t xEventGroupCreate( void );
参数:无
返回值:成功,返回对应事件标志组的句柄;失败,返回NULL。
设置事件标志位:EventBits_t xEventGroupSetBits( EventGroupHandle_t xEventGroup,const EventBits_t uxBitsToSet );
参数:xEventGroup:对应事件组句柄。 uxBitsToSet:指定要在事件组中设置的一个或多个位的按位值。
返回值:设置之后事件组中的事件标志位值。
清除事件标志位:EventBits_t xEventGroupClearBits(EventGroupHandle_t xEventGroup,const EventBits_t uxBitsToClear );
参数:xEventGroup:对应事件组句柄。 uxBitsToClear:指定要在事件组中清除的一个或多个位的按位值。
返回值:清零之前事件组中事件标志位的值。
等待事件标志位:EventBits_t xEventGroupWaitBits(const EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToWaitFor,
const BaseType_t xClearOnExit,
const BaseType_t xWaitForAllBits,
TickType_t xTicksToWait );
参数:xEventGroup:对应的事件标志组句柄
uxBitsToWaitFor:指定事件组中要等待的一个或多个事件位的按位值
xClearOnExit:pdTRUE——清除对应事件位,pdFALSE——不清除
xWaitForAllBits:pdTRUE——所有等待事件位全为1(逻辑与),pdFALSE——等待的事件位有一个为1(逻辑或)
xTicksToWait:超时
返回值:
等待的事件标志位值:等待事件标志位成功,返回等待到的事件标志位
其他值:等待事件标志位失败,返回事件组中的事件标志位
18 事件标志组实操
(1)实验需求:创建一个事件标志组和两个任务(task1和task2),task1检测按键,如果检测到 KEY1和KEY2都按过,则执行task2。
(2)代码编写:复制模板工程(工程名:muban),点击进入CubeMX中创建2个任务;任务1检测key1跟key2是否按过,key1按过设置事件标志位0x01,key2按过设置事件标志位0x02; 任务2则进行等待事件标志位,当第一位跟第二位都为1时,才执行响应操作;(工程名:events_test)
2.1 创建任务Task1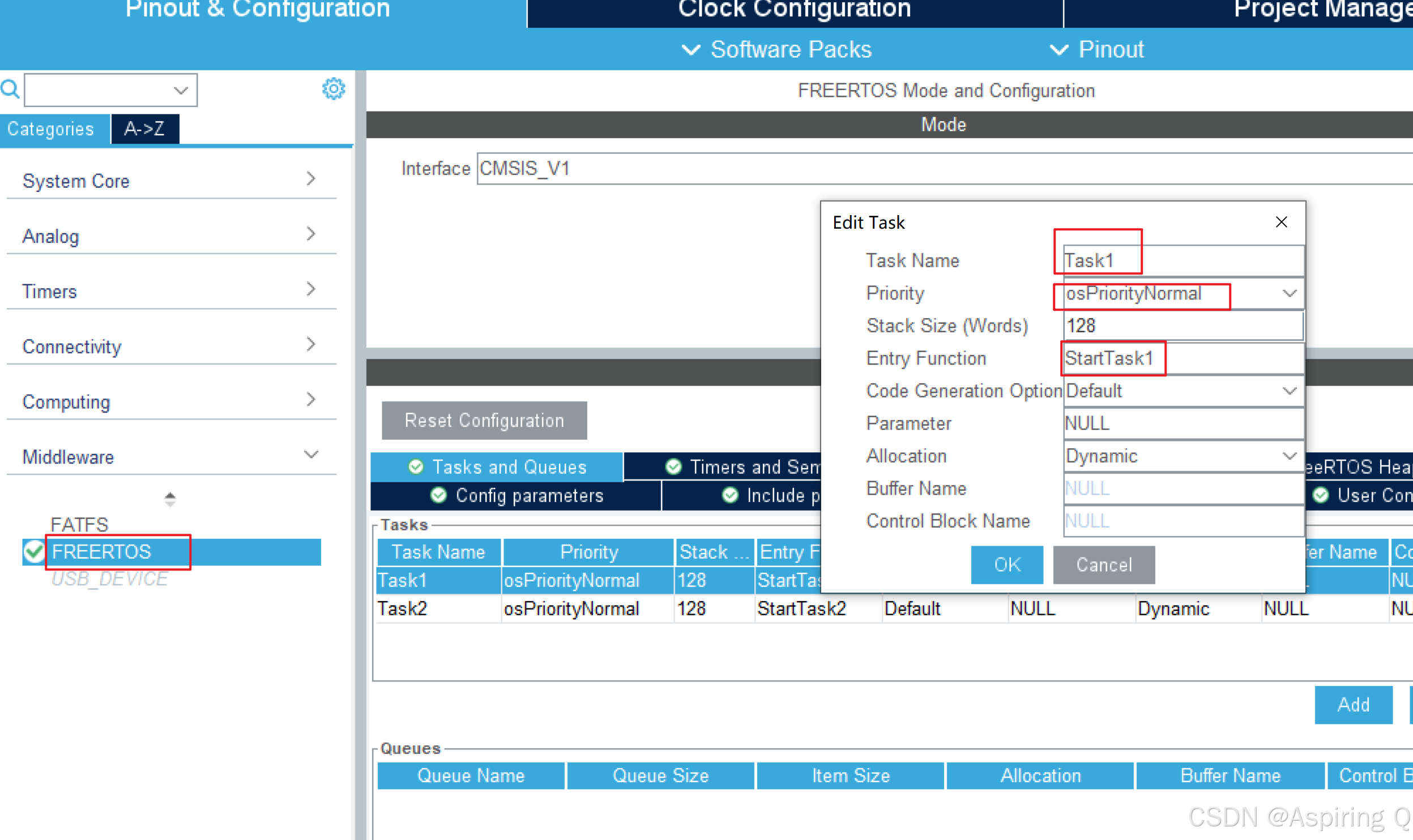
2.2 创建任务Task2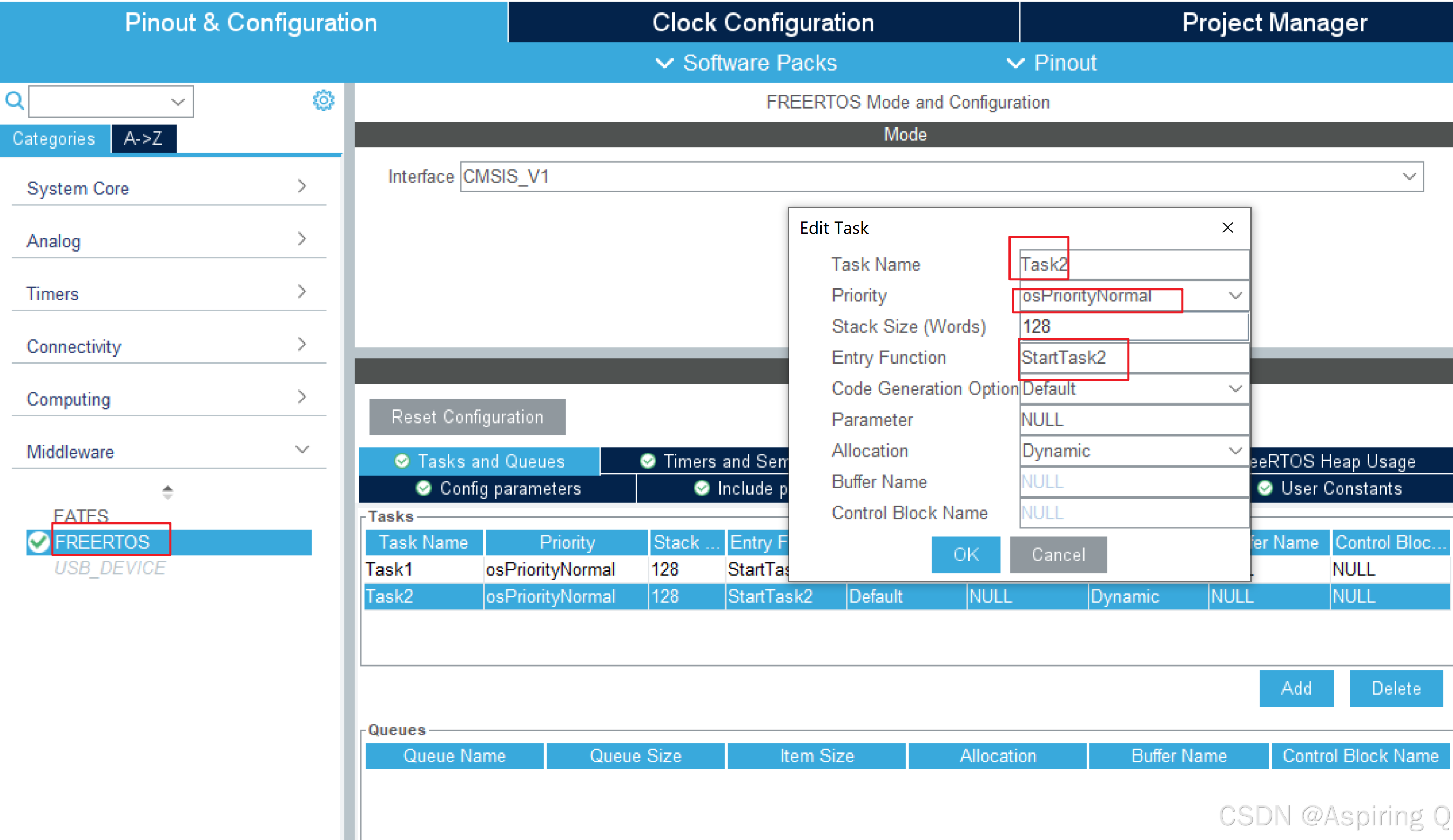
2.3 在freertos.c中编写代码
EventGroupHandle_t eventgroup_handle;
eventgroup_handle = xEventGroupCreate();
/* USER CODE END Header_StartTask1 */
void StartTask1(void const * argument)
{
/* USER CODE BEGIN StartTask1 */
/* Infinite loop */
for(;;)
{
// 等待 KEY1 按下
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
xEventGroupSetBits(eventgroup_handle,0x01);
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET);
}
// 等待 KEY2 按下
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
xEventGroupSetBits(eventgroup_handle,0x02);
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(1);
}
/* USER CODE END StartTask1 */
}
/* USER CODE END Header_StartTask2 */
void StartTask2(void const * argument)
{
/* USER CODE BEGIN StartTask2 */
/* Infinite loop */
EventBits_t event_bit = 0;
for(;;)
{
event_bit = xEventGroupWaitBits(eventgroup_handle,0x01 | 0x02,pdTRUE,pdTRUE,portMAX_DELAY);
printf("返回值为%#x\r\n",event_bit);
osDelay(1);
}
/* USER CODE END StartTask2 */
}
2.4 结果检测到 KEY1和KEY2都按过,返回事件组中的事件标志位值为0x3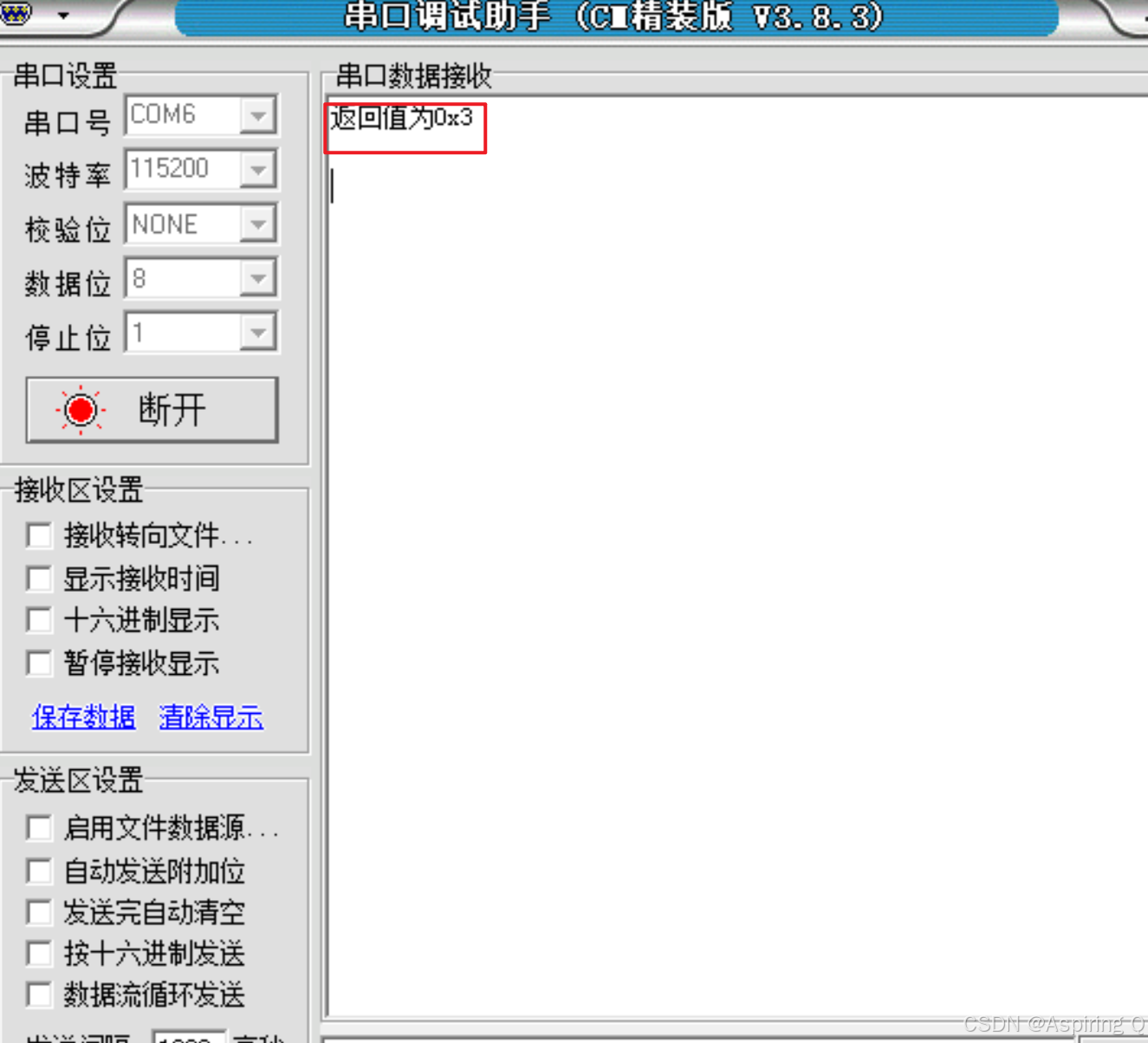
19 任务通知简介
(1)任务通知:每个任务都有一个32位的通知值,任务通知可以替代二值信号量、计数信号量、事件标志组,可以替代长度为1的队列(可以保存一个32位整数或指针值),并且任务通知速度更快、使用的RAM更少。
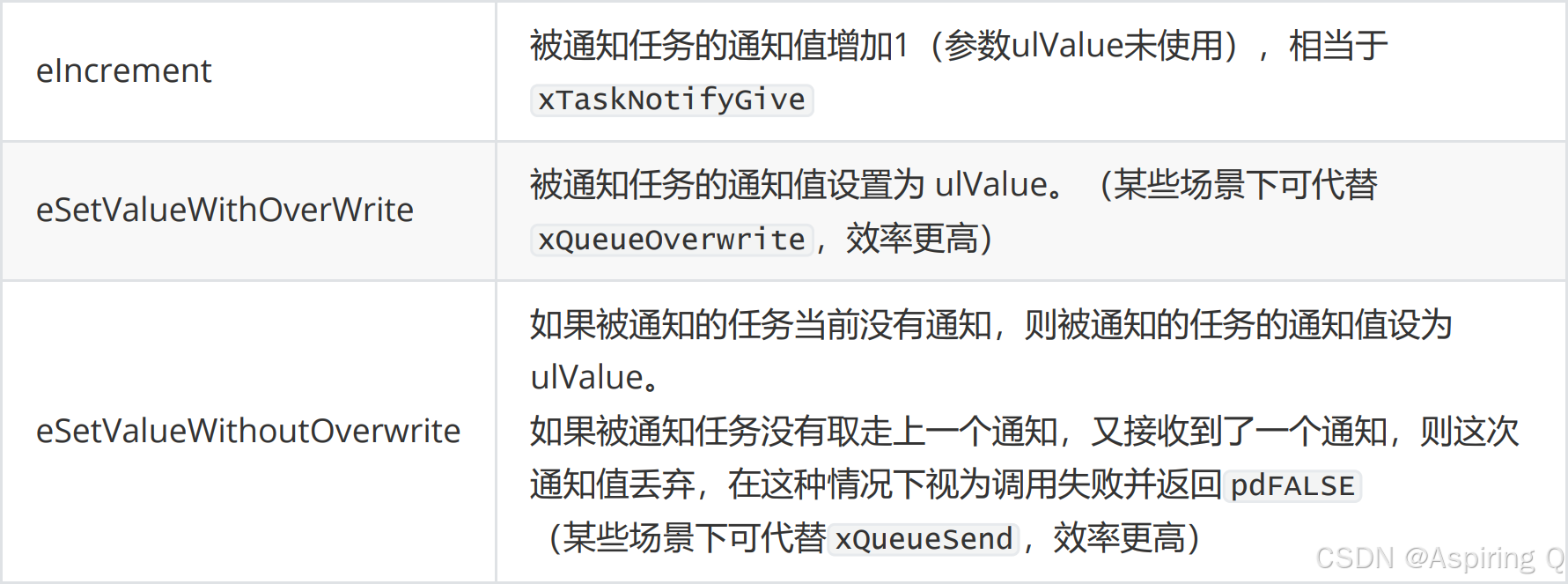
(2)任务通知值的更新方式:
1.发送消息给任务,如果有通知未读, 不覆盖通知值
2.发送消息给任务,直接覆盖通知值
3.发送消息给任务,设置通知值的一个或者多个位
4.发送消息给任务,递增通知值
(3)任务通知的优势:
1. 使用任务通知向任务发送事件或数据,比使用队列、事件标志组或信号量快得多。
2. 使用其他方法时都要先创建对应的结构体,使用任务通知时无需额外创建结构体。
(4)任务通知的劣势:
1. 只有任务可以等待通知,中断服务函数中不可以,因为中断没有TCB 。
2. 通知只能一对一,因为通知必须指定任务。
3. 等待通知的任务可以被阻塞, 但是发送消息的任务,任何情况下都不会被阻塞等待。
4. 任务通知是通过更新任务通知值来发送数据的,任务结构体中只有一个任务通知值,只能保持一个数据。
(5)任务通知相关函数:
1.发送通知函数:
xTaskNotify() 发送通知,带有通知值
xTaskNotifyAndQuery() 发送通知,带有通知值并且保留接收任务的原通知值
xTaskNotifyGive() 发送通知,不带通知值
xTaskNotifyFromISR() 在中断中发送任务通知
xTaskNotifyAndQueryFromISR() 在中断中发送任务通知
vTaskNotifyGiveFromISR() 在中断中发送任务通知
例1:BaseType_t xTaskNotify( TaskHandle_t xTaskToNotify,uint32_t ulValue,eNotifyAction eAction );
参数:
xTaskToNotify:需要接收通知的任务句柄;
ulValue:用于更新接收任务通知值, 具体如何更新由形参 eAction 决定;
eAction:一个枚举,代表如何使用任务通知的值;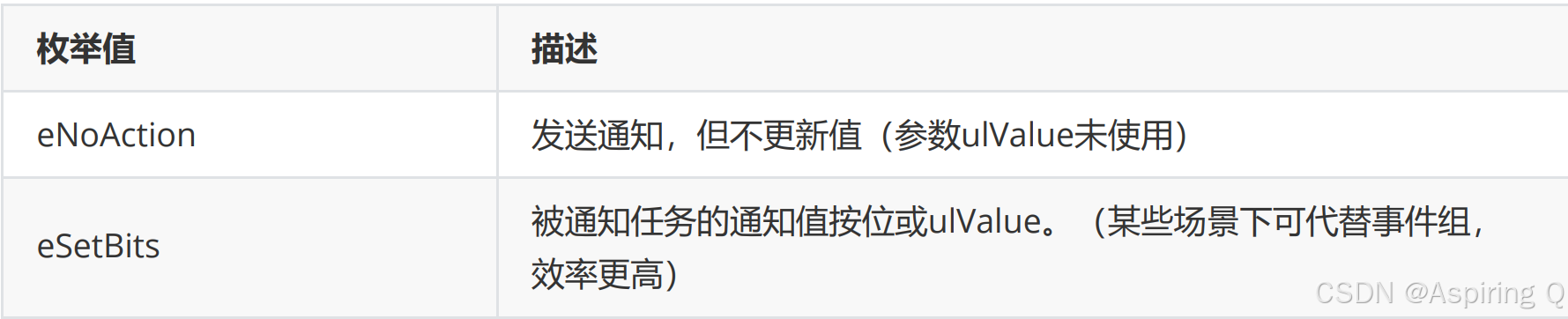
返回值:如果被通知任务还没取走上一个通知,又接收了一个通知,则这次通知值未能更新并返回pdFALSE, 而其他情况均返回pdPASS。
例2:BaseType_t xTaskNotifyAndQuery( TaskHandle_t xTaskToNotify,uint32_t ulValue,eNotifyAction eAction,uint32_t *pulPreviousNotifyValue );
参数:
xTaskToNotify:需要接收通知的任务句柄;
ulValue:用于更新接收任务通知值, 具体如何更新由形参 eAction 决定;
eAction:一个枚举,代表如何使用任务通知的值;
pulPreviousNotifyValue:对象任务的上一个任务通知值,如果为 NULL, 则不需要回传, 这个时候就等价于函数 xTaskNotify()。
返回值:
如果被通知任务还没取走上一个通知,又接收了一个通知,则这次通知值未能更新并返回pdFALSE, 而其他情况均返回pdPASS。
例3:BaseType_t xTaskNotifyGive( TaskHandle_t xTaskToNotify );
参数:xTaskToNotify:接收通知的任务句柄, 并让其自身的任务通知值加 1。
返回值:总是返回 pdPASS。
2.等待通知函数:
ulTaskNotifyTake() 获取任务通知,可以设置在退出此函数的时候将任务通知值清零或者减一。当任务通知用作二值信号量或者计数信号量的时候,使用此函数来获取信号量。
xTaskNotifyWait() 获取任务通知,比 ulTaskNotifyTak()更为复杂,可获取通知值和清除通知值的指定位
例1:uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit,TickType_t xTicksToWait );
参数:xClearCountOnExit:指定在成功接收通知后,将通知值清零或减 1,pdTRUE:把通知值清零(二值信号量);pdFALSE:把通知值减一(计数型信号量);
xTicksToWait:阻塞等待任务通知值的最大时间;
返回值:0:接收失败 非0:接收成功,返回任务通知的通知值
例2:BaseType_t xTaskNotifyWait( uint32_t ulBitsToClearOnEntry,uint32_t ulBitsToClearOnExit,uint32_t pulNotificationValue,TickType_t xTicksToWait );
参数:
ulBitsToClearOnEntry:函数执行前清零任务通知值那些位 。
ulBitsToClearOnExit:表示在函数退出前,清零任务通知值那些位,在清0前,接收到的任务通知值会先被保存到形参pulNotificationValue 中。
pulNotificationValue:用于保存接收到的任务通知值。 如果 不需要使用,则设置为 NULL 即可 。
xTicksToWait:等待消息通知的最大等待时间。
20 任务通知实操
(1)实验需求:1. 模拟二值信号量
2. 模拟计数型信号量
3. 模拟事件标志组
4. 模拟邮箱
(2)代码实现:复制模板工程,点击进入CubeMX中创建2个任务;任务1为任务发送,任务2为任务接收;
1.模拟二值信号量的话,任务1中按下按键1用xTaskNotifyGive()发送通知,任务2中按下按下按键2用ulTaskNotifyTake()接收通知,其中xClearCountOnExit为pdTRUE。(工程名:notify_binary_test)
1.1 PA0,PA1两引脚设置为GPIO_input 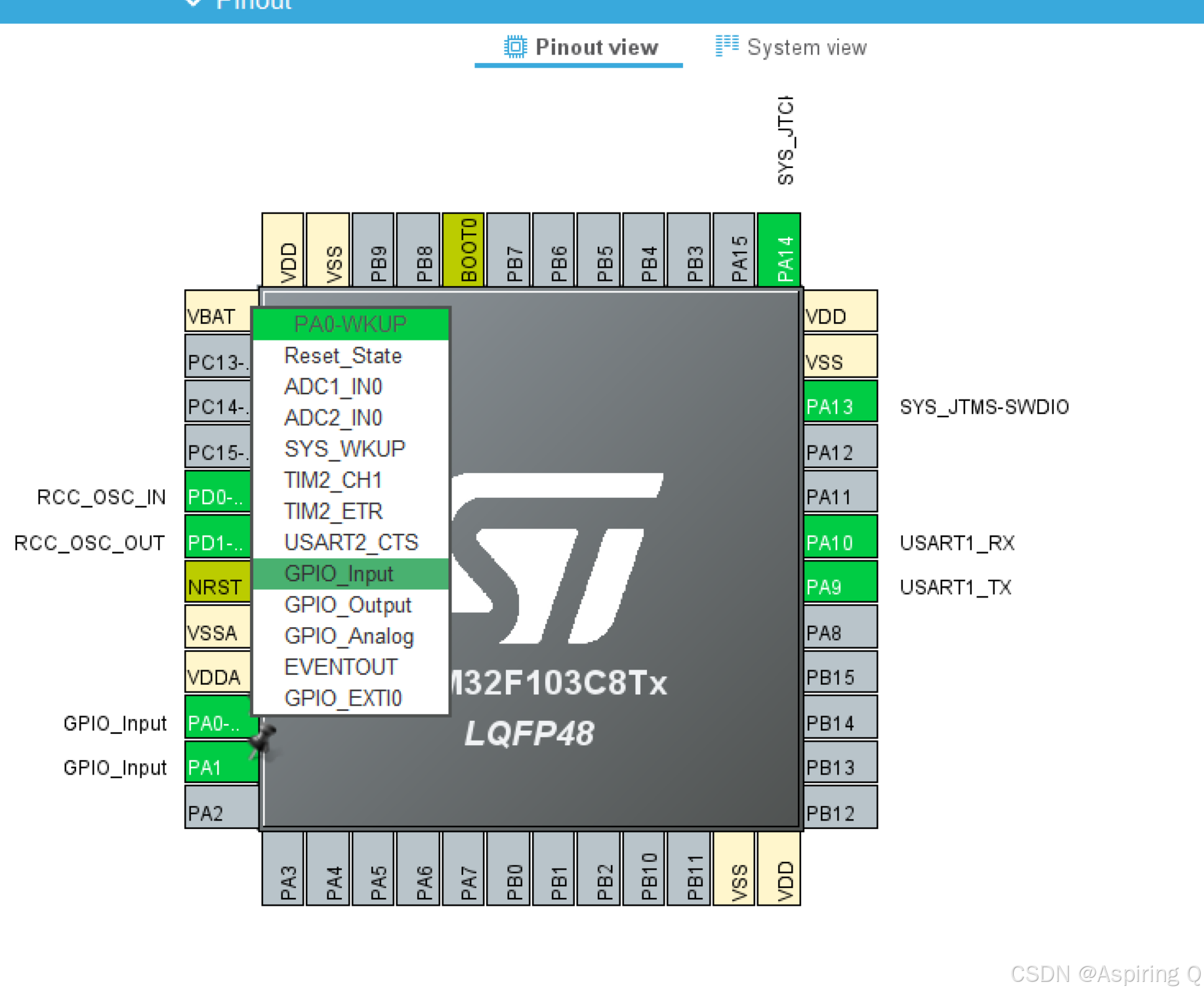
1.2 创建任务taskSend 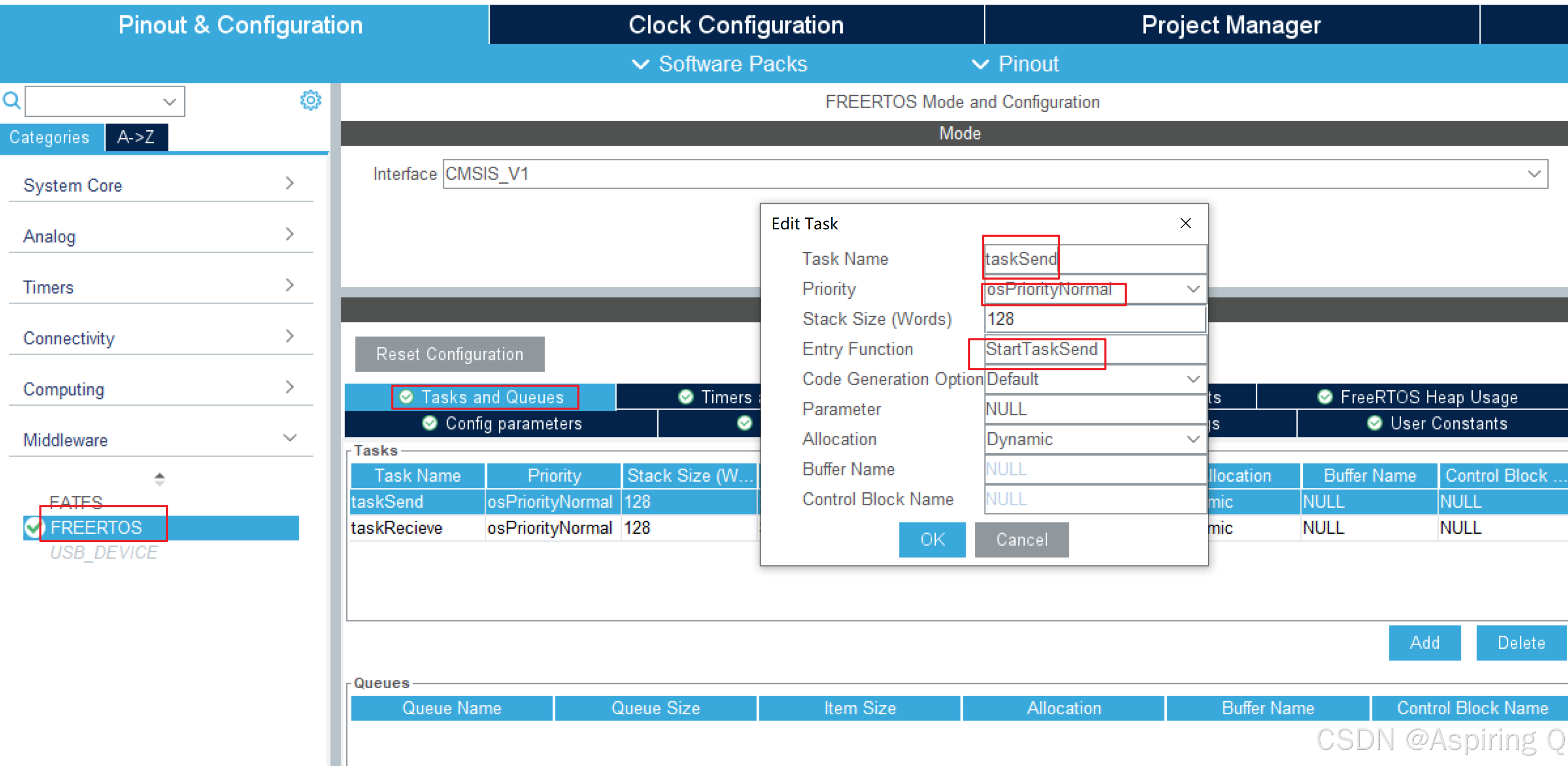
1.3 创建任务taskRecieve 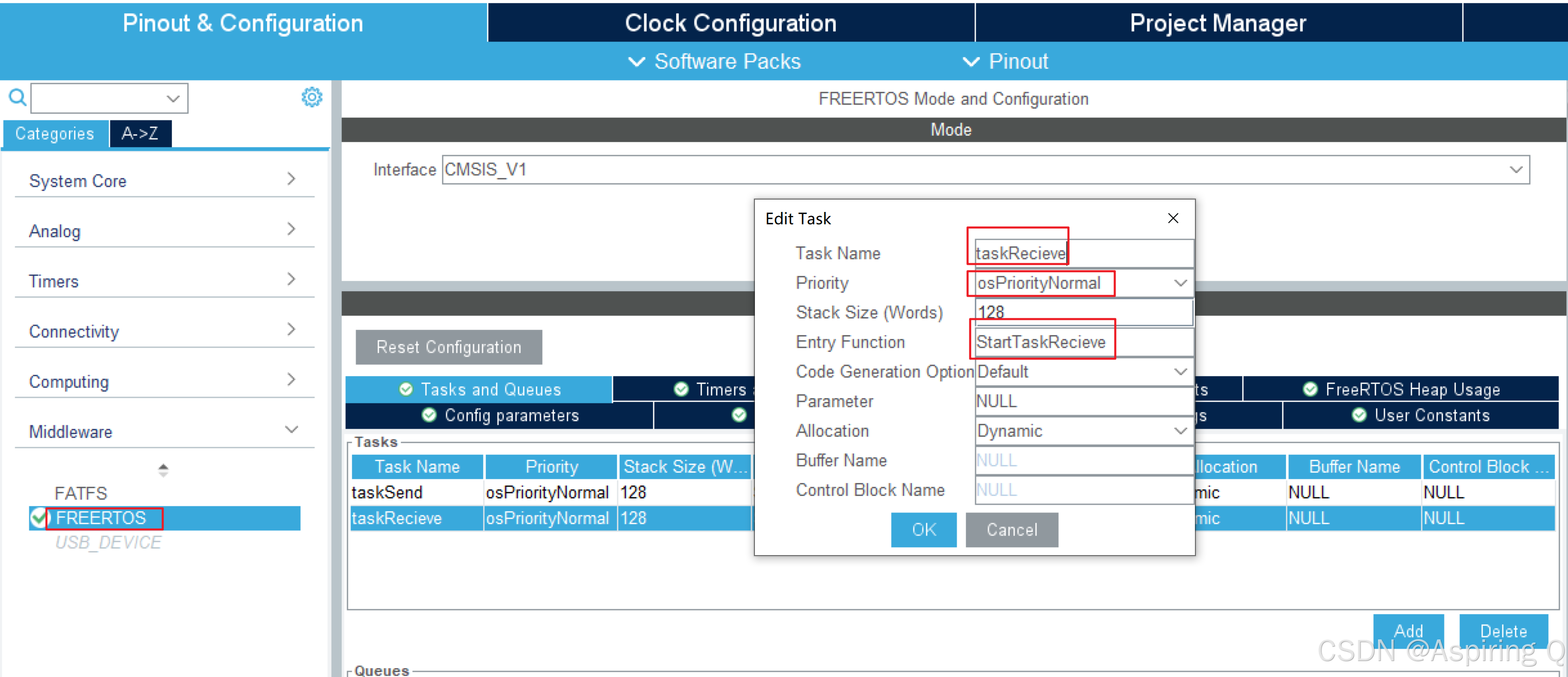
1.4 在freertos.c中编写代码
/* USER CODE END Header_StartTaskSend */
void StartTaskSend(void const * argument)
{
/* USER CODE BEGIN StartTaskSend */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
xTaskNotifyGive(taskRecieveHandle);
printf("任务通知:模拟二值信号量发送成功\r\n");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskSend */
}
/* USER CODE END Header_StartTaskRecieve */
void StartTaskRecieve(void const * argument)
{
/* USER CODE BEGIN StartTaskRecieve */
/* Infinite loop */
uint32_t rev = 0;
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
rev = ulTaskNotifyTake(pdTRUE,portMAX_DELAY);
if(rev != 0)
{
printf("任务通知:模拟二值信号量接收成功\r\n");
}
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskRecieve */
}
1.5 模拟二值信号量成功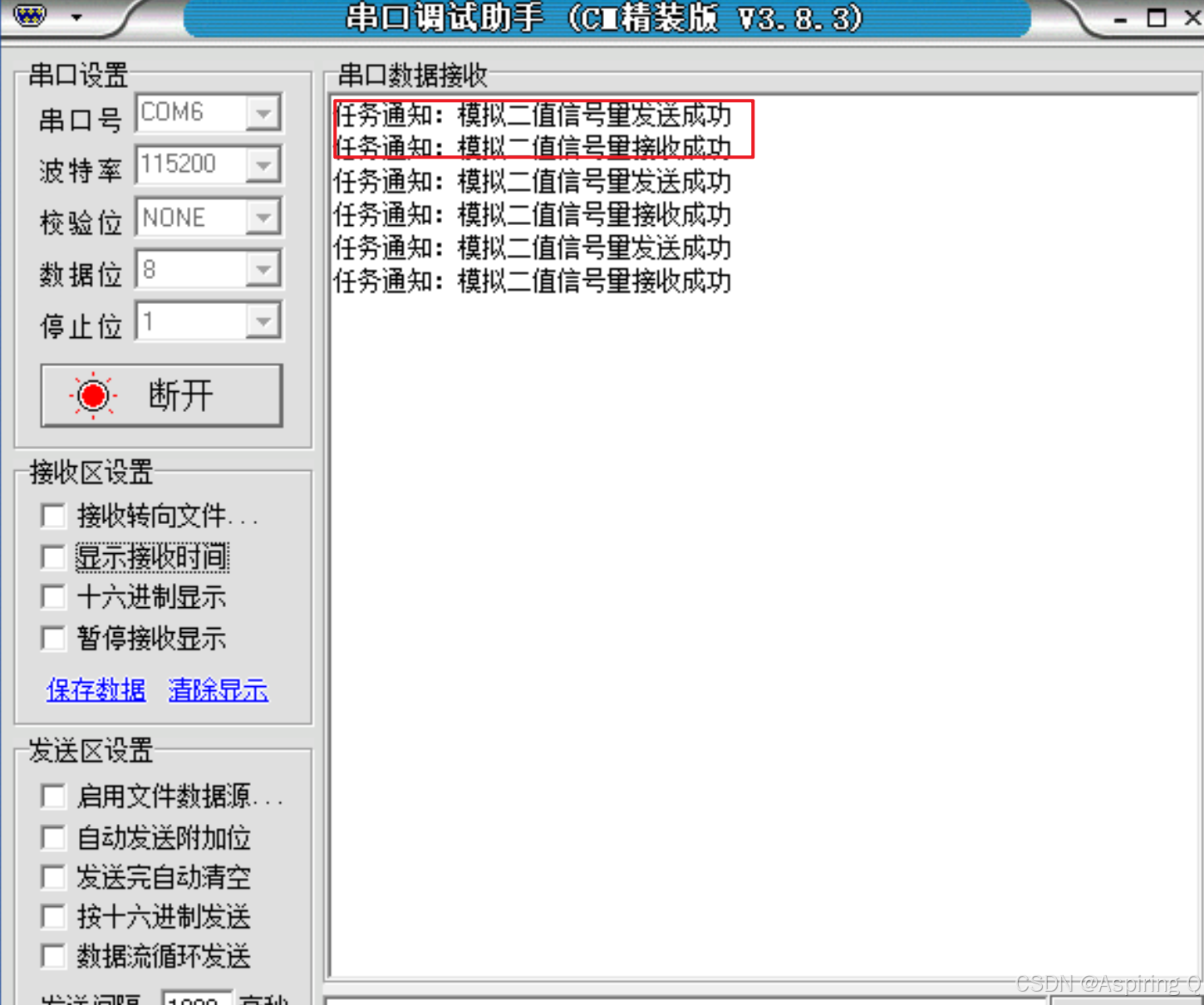
2.模拟计数型信号量的话,任务1中按下按键1用xTaskNotifyGive()发送通知,任务2中按下按下按键2用ulTaskNotifyTake()接收通知,其中xClearCountOnExit为pdFALSE。(工程名:notify_counting_test)
2.1 在freertos.c中编写代码
/* USER CODE END Header_StartTaskSend */
void StartTaskSend(void const * argument)
{
/* USER CODE BEGIN StartTaskSend */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
xTaskNotifyGive(taskRecieveHandle);
printf("任务通知:模拟计数型信号量发送成功\r\n");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskSend */
}
/* USER CODE END Header_StartTaskRecieve */
void StartTaskRecieve(void const * argument)
{
/* USER CODE BEGIN StartTaskRecieve */
/* Infinite loop */
uint32_t rev = 0;
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
rev = ulTaskNotifyTake(pdFALSE,portMAX_DELAY);
if(rev != 0)
{
printf("任务通知:模拟计数型信号量接收成功,rev=%d\r\n",rev);
}
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskRecieve */
}
2.2 模拟计数型信号量成功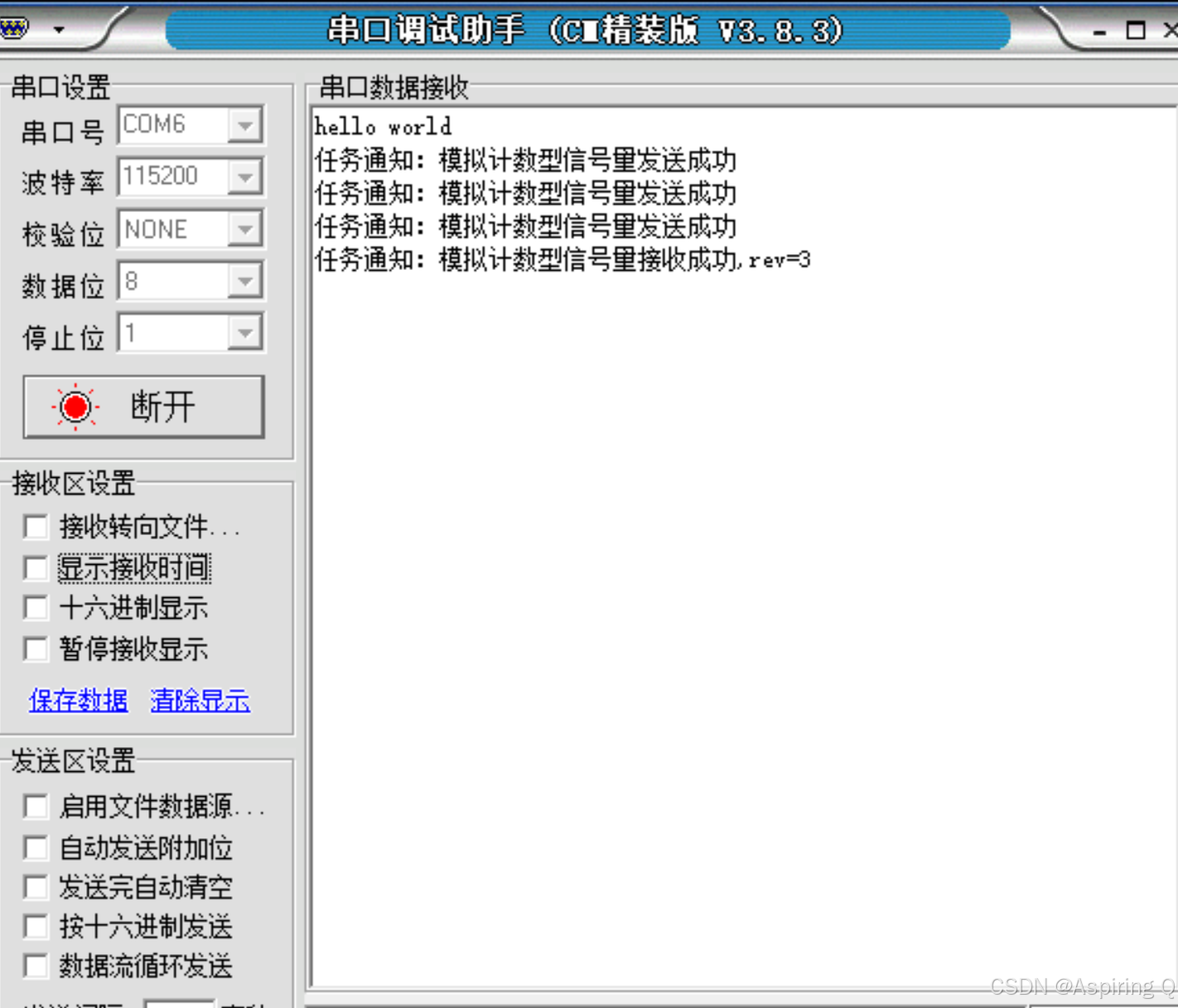
3.模拟事件标志组的话,任务1中按下按键1用xTaskNotify()发送通知,第0位置1,按下按键2用xTaskNotify()发送通知,第1位置1,其中eAction为eSetBits;任务2用xTaskNotifyWait()接收通知;(工程名:notify_events_test)
3.1 在freertos.c中编写代码
/* USER CODE END Header_StartTaskSend */
void StartTaskSend(void const * argument)
{
/* USER CODE BEGIN StartTaskSend */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
printf("把bit0位置1\r\n");
xTaskNotify(taskRecieveHandle,0x01,eSetBits);
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET);
}
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
printf("把bit1位置1\r\n");
xTaskNotify(taskRecieveHandle,0x02,eSetBits);
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskSend */
}
/* USER CODE END Header_StartTaskRecieve */
void StartTaskRecieve(void const * argument)
{
/* USER CODE BEGIN StartTaskRecieve */
/* Infinite loop */
uint32_t notify_val = 0,event_bit = 0;
for(;;)
{
xTaskNotifyWait(0,0xFFFFFFFF,¬ify_val,portMAX_DELAY);
if(notify_val & 0x01)
event_bit |= 0x01;
if(notify_val & 0x02)
event_bit |= 0x02;
if(event_bit ==(0x01 | 0x02))
{
printf("任务通知:模拟事件标志组成功\r\n");
event_bit = 0;
}
osDelay(10);
}
/* USER CODE END StartTaskRecieve */
}
3.2 模拟事件标志组成功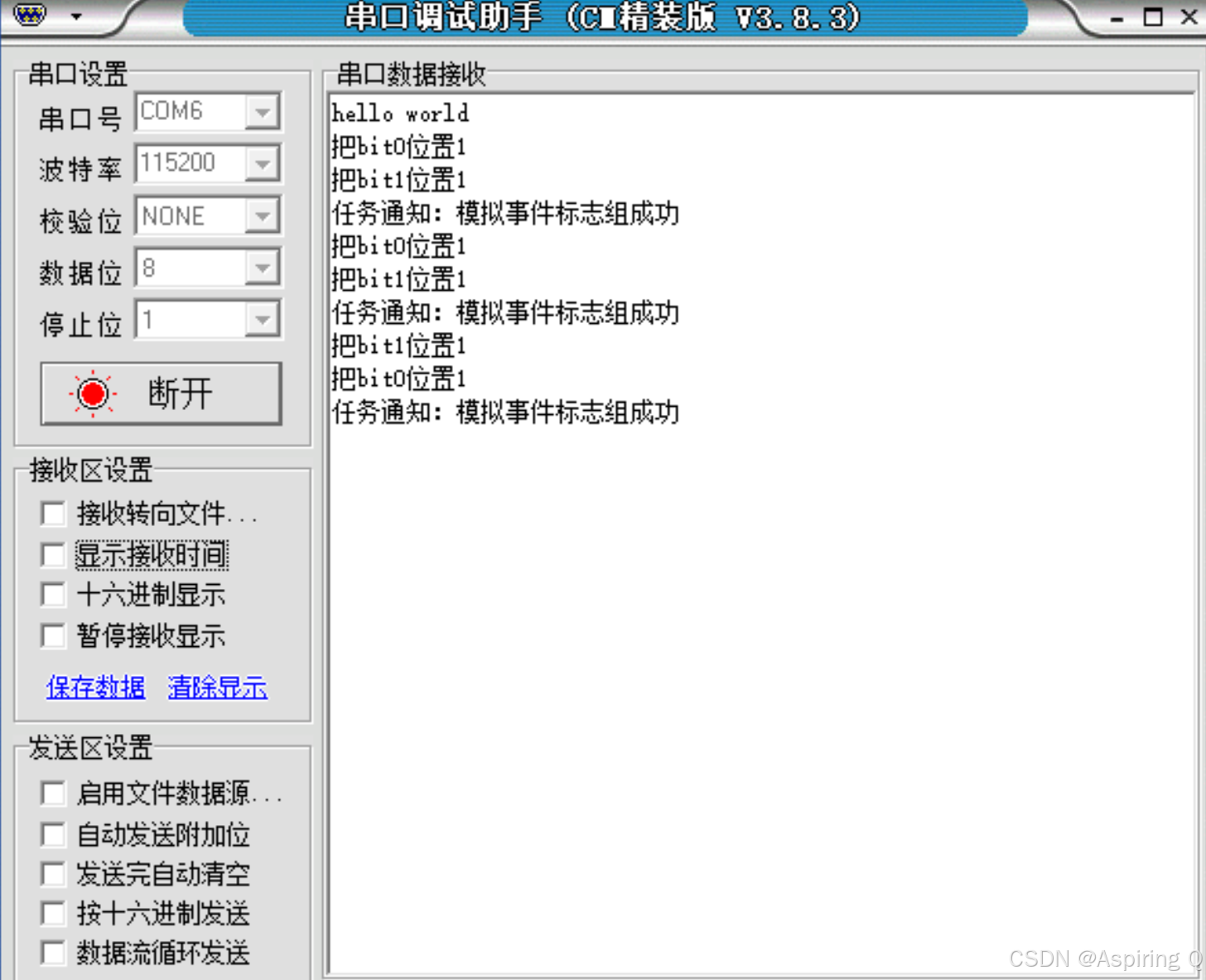
4.模拟邮箱的话,任务1中按下按键1用xTaskNotify()发送通知,按下按键2也用xTaskNotify()发送通知,其中eAction为eSetValueWithOverWrite(覆写)或eSetValueWithoutOverwrite(不覆写);任务2用xTaskNotifyWait()接收通知;
(工程名:notify_queue_test)
4.1 在freertos.c中编写代码
/* USER CODE END Header_StartTaskSend */
void StartTaskSend(void const * argument)
{
/* USER CODE BEGIN StartTaskSend */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
printf("按键1按下\r\n");
xTaskNotify(taskRecieveHandle,0x01,eSetValueWithOverwrite);
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET);
}
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
printf("按键2按下\r\n");
xTaskNotify(taskRecieveHandle,0x02,eSetValueWithOverwrite);
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskSend */
}
/* USER CODE END Header_StartTaskRecieve */
void StartTaskRecieve(void const * argument)
{
/* USER CODE BEGIN StartTaskRecieve */
/* Infinite loop */
uint32_t notify_val = 0;
for(;;)
{
xTaskNotifyWait(0,0xFFFFFFFF,¬ify_val,portMAX_DELAY);
printf("接收到的通知值为:%d\r\n",notify_val);
osDelay(10);
}
/* USER CODE END StartTaskRecieve */
}
4.2 模拟邮箱成功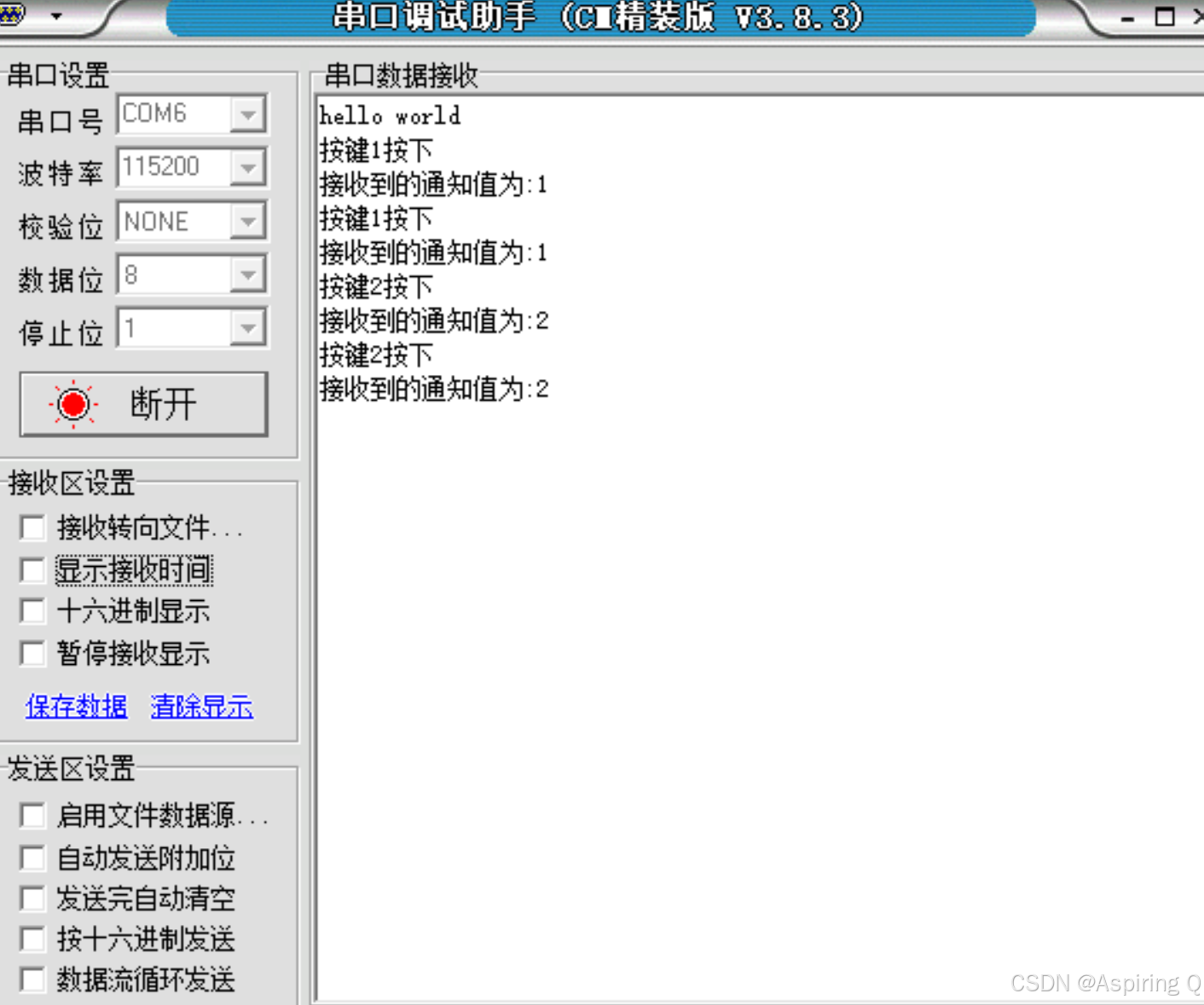
21 延时函数
(1)延时函数分类:
相对延时:vTaskDelay,起点是从调用延时函数开始;
绝对延时:vTaskDelayUntil,第2次调用延时函数的起点是第一次调用延时函数的终点;
(2)vTaskDelay与HAL_Delay的区别:
vTaskDelay 作用是让任务阻塞,任务阻塞后,RTOS系统调用其它处于就绪状态的优先级最高的任务来执行。
HAL_Delay 一直不停的调用获取系统时间的函数,直到指定的时间流逝然后退出,故其占用了全部CPU时间。
22 软件定时器简介
(1)硬件定时器:STM32 芯片自带硬件定时器,精度较高,达到定时时间后会触发中断,也可以生成 PWM 、输入捕获、输出比较,等等,功能强大,但是由于硬件的限制,个数有限。
软件定时器:软件定时器也可以实现定时功能,达到定时时间后可调用回调函数,可以在回调函数里处理信息。
(2)软件定时器服务任务:在调用函数 vTaskStartScheduler() 开启任务调度器的时候,会创建一个用于管理软件定时器的任务,这个任务就叫做软件定时器服务任务。
软件定时器服务任务作用:1. 负责软件定时器超时的逻辑判断 2. 调用超时软件定时器的超时回调函数 3. 处理软件定时器命令队列
定时器命令队列:FreeRTOS提供了很多定时器有关的API函数,这些API函数大多都使用FreeRTOS的队列发送命令给定时器服务任务。这个队列叫做定时器命令队列。
(3)软件定时器相关配置:
1.configUSE_TIMERS 设置为1的话定时器服务任务就会在启动FreeRTOS调度器的时候自动创建
2.configTIMER_TASK_PRIORITY 设置软件定时器服务任务的任务优先级,可以为0~(configMAX_PRIORITIES-1)
3.configTIMER_QUEUE_LENGTH 此宏用来设置定时器命令队列的队列长度。
4.configTIMER_TASK_STACK_DEPTH 此宏用来设置定时器服务任务的任务堆栈大小。
(4)单次定时器和周期定时器:
单次定时器: 只超时一次,调用一次回调函数。可手动再开启定时器;
周期定时器: 多次超时,多次调用回调函数。
(5)软件定时器相关API函数:
xTimerCreate() 动态方式创建软件定时器
xTimerCreateStatic() 静态方式创建软件定时器
xTimerStart() 开启软件定时器定时
xTimerStop() 停止软件定时器定时
xTimerReset() 复位软件定时器定时
xTimerChangePeriod() 更改软件定时器的定时超时时间
xTimerStartFromISR() 在中断中开启软件定时器定时
xTimerStopFromISR() 在中断中停止软件定时器定时
xTimerResetFromISR() 在中断中复位软件定时器定时
xTimerChangePeriodFromISR() 在中断中更改定时超时时间
1. 创建软件定时器:TimerHandle_t xTimerCreate( const char * const pcTimerName, const TickType_t xTimerPeriod,const UBaseType_t uxAutoReload,void * const pvTimerID, TimerCallbackFunction_t pxCallbackFunction );
参数:pcTimerName:软件定时器名称
xTimerPeriodInTicks:定时超时时间,单位:系统时钟节拍。宏pdMS_TO_TICKS() 可用于将以毫秒为单位指定的时间转换为以 tick 为单位指定的时间。
uxAutoReload:定时器模式, pdTRUE:周期定时器, pdFALSE:单次定时器
pvTimerID:软件定时器 ID,用于多个软件定时器公用一个超时回调函数
pxCallbackFunction:软件定时器超时回调函数
返回值:成功:定时器句柄 失败:NULL
2.开启软件定时器:BaseType_t xTimerStart( TimerHandle_t xTimer, TickType_t xBlockTime );
参数:xTimer:待开启的软件定时器的句柄 xTickToWait:发送命令到软件定时器命令队列的最大等待时间
返回值:pdPASS:开启成功 pdFAIL:开启失败
3. 停止软件定时器:BaseType_t xTimerStop( TimerHandle_t xTimer,TickType_t xBlockTime );
参数与返回值同上。
4. 复位软件定时器:BaseType_t xTimerReset( TimerHandle_t xTimer, TickType_t xBlockTime );
参数与返回值同上。
5. 更改软件定时器定时时间:BaseType_t xTimerChangePeriod( TimerHandle_t xTimer, TickType_t xNewPeriod,TickType_t xBlockTime );
xNewPeriod:新的定时超时时间,单位:系统时钟节拍。其余参数与返回值同上。
23 软件定时器实操
(1)实验需求:创建两个定时器,定时器1,周期定时器,每1秒打印一次A;定时器2,单次定时器,启动后 2 秒打印一次B
(2)代码实现:复制模板工程(工程名:muban),点击进入CubeMX中设定USE_TIMERS为Enable,创建一个周期定时器,一个单次定时器;
代码中用 osTimerStart(myTimer01Handle, 1000)或xTimerChangePeriod(myTimer01Handle, pdMS_TO_TICKS(1000), 0)开启定时器,定时器1回调函数中打印A,定时器2回调函数中打印B;(工程名:timer_test)
2.1 配置使用定时器为Enabled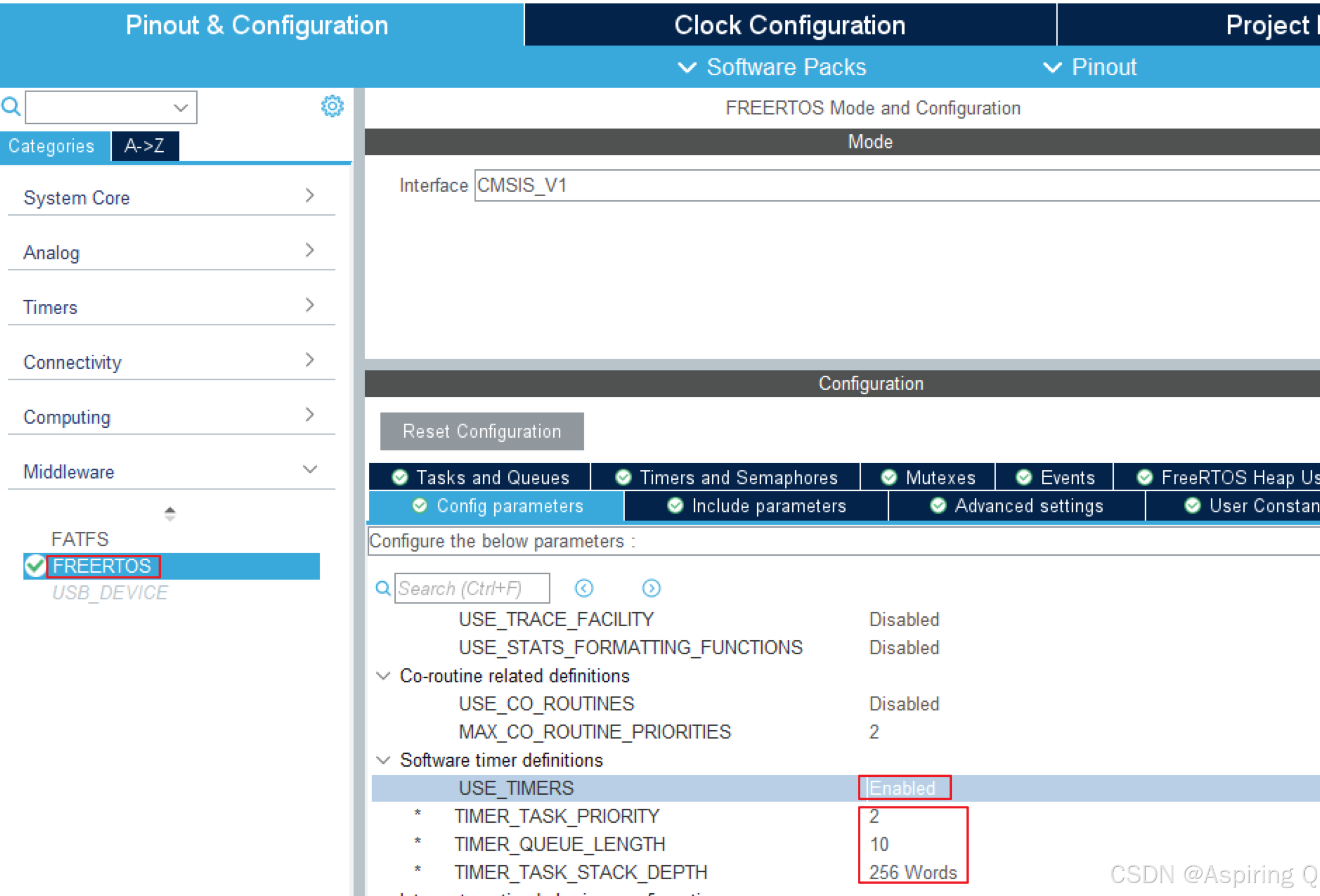
2.2 创建定时器1为周期定时器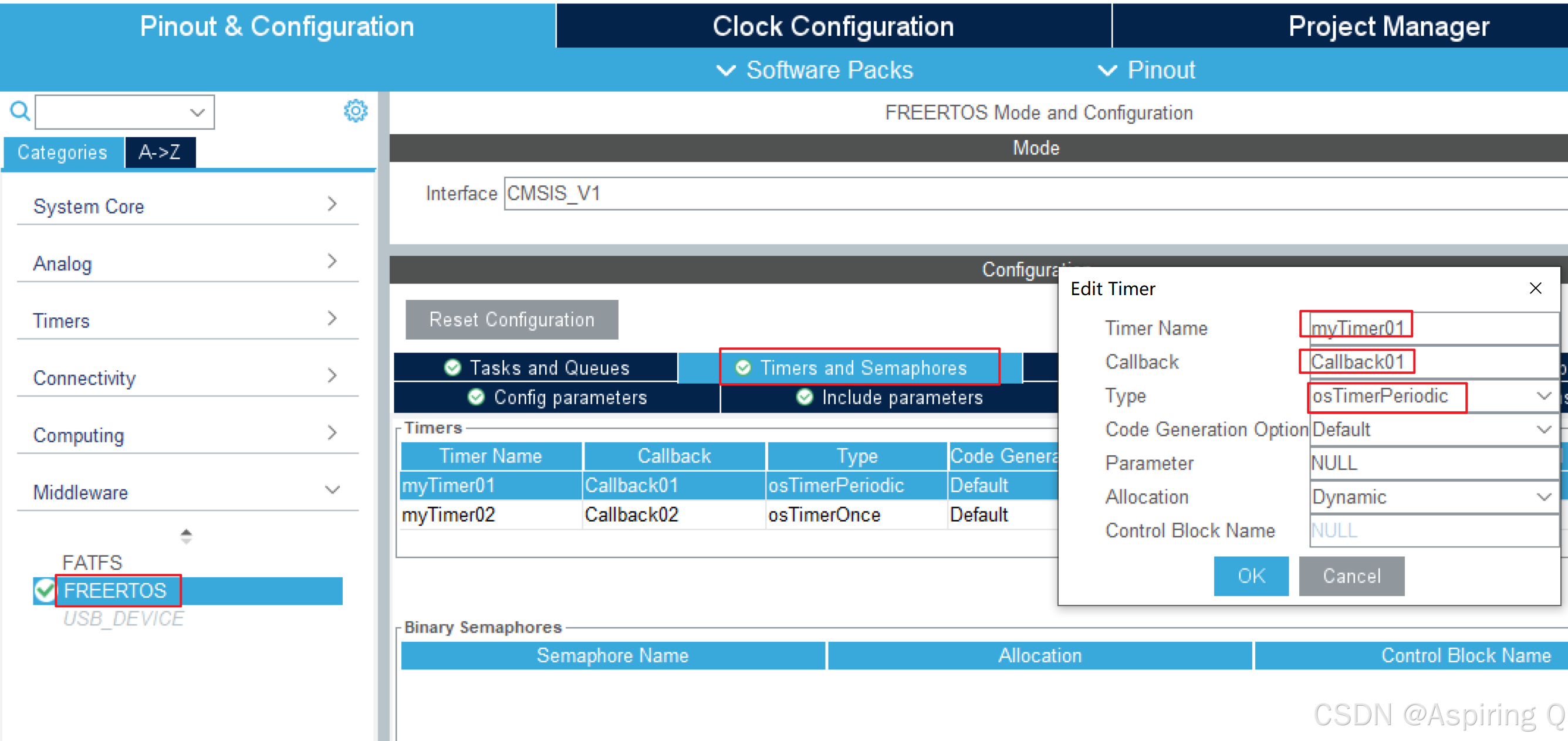
2.3 创建定时器2为单次定时器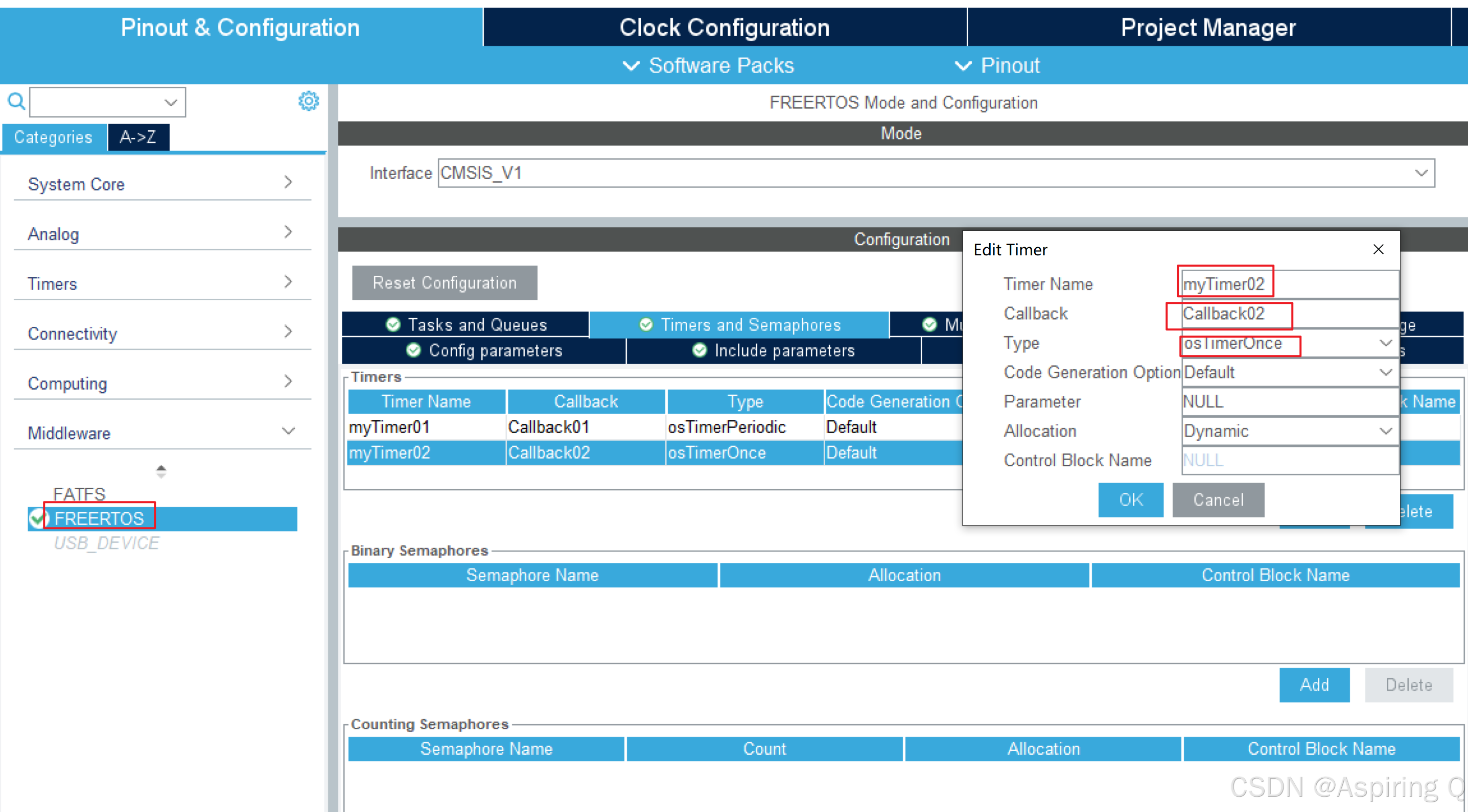
2.4 在freertos.c中编写代码
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
// osTimerStart(myTimer01Handle,1000);
xTimerChangePeriod(myTimer01Handle,pdMS_TO_TICKS(1000),0);//更改软件定时器定时时间来开启定时
osTimerStart(myTimer02Handle,2000);//自带封装了的开启软件定时器函数
for(;;)
{
osDelay(1);
}
/* USER CODE END StartDefaultTask */
}
/* Callback01 function */
void Callback01(void const * argument)
{
/* USER CODE BEGIN Callback01 */
printf("timer01:A");
/* USER CODE END Callback01 */
}
/* Callback02 function */
void Callback02(void const * argument)
{
/* USER CODE BEGIN Callback02 */
printf("timer02:B");
/* USER CODE END Callback02 */
}
2.5显示结果:定时器1启动后每隔1秒打印A,定时器2启动2秒后仅打印一次B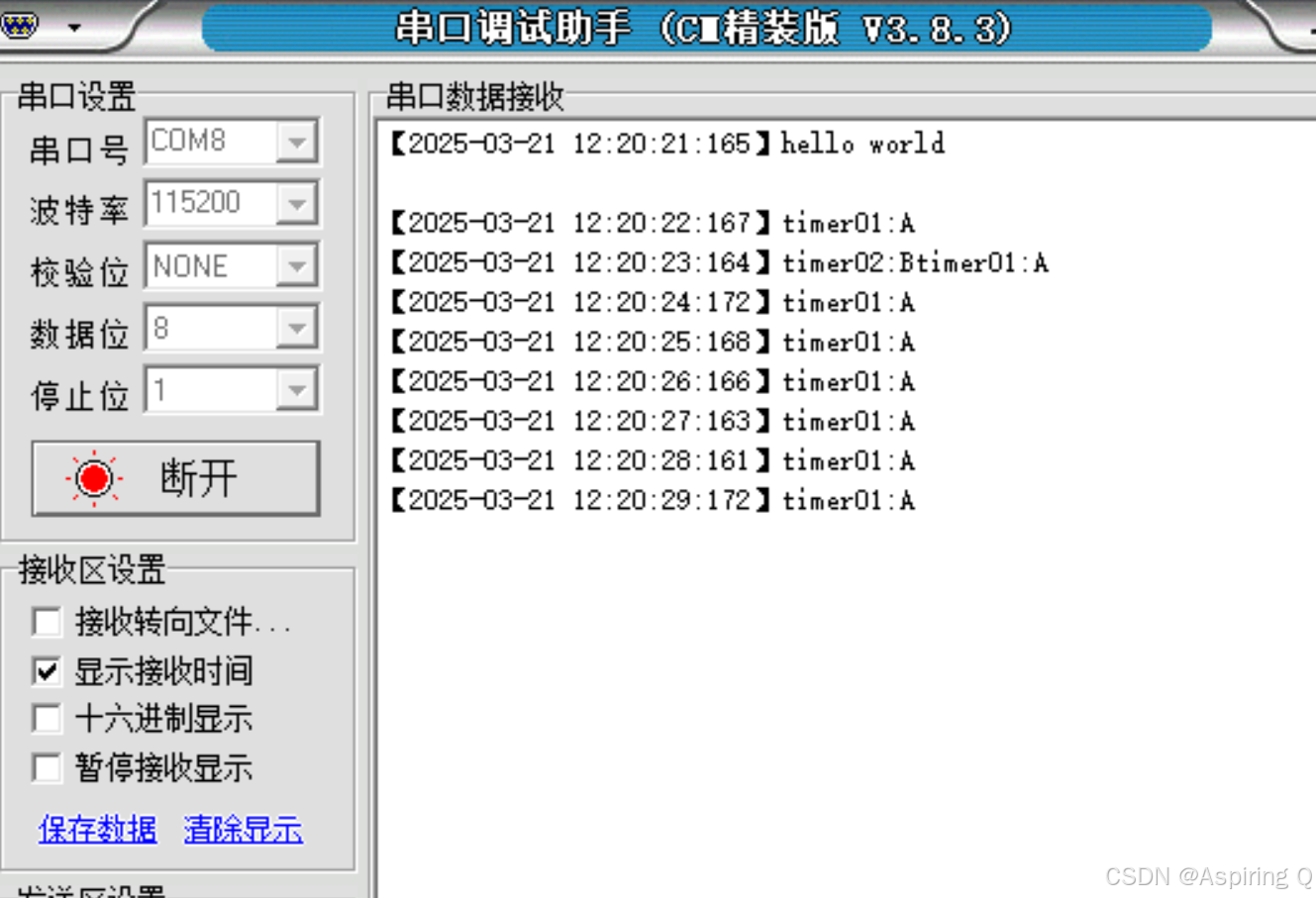
24 中断管理
(1)实验需求:创建一个队列及一个任务,按下按键 KEY1 触发中断,在中断服务函数里向队列里发送数据,任务则阻塞接收队列数据。
(2)代码实现:复制模板工程(工程名:muban),点击进入CubeMX中配置中断引脚,勾选中断使能,创建1个任务和一个队列,重写中断回调函数HAL_GPIO_EXTI_Callback(),回调函数中用xQueueSendFromISR(myQueue01Handle, &snd, NULL)向队列中发送数据,然后在任务中用xQueueReceive(myQueue01Handle, &rev, portMAX_DELAY)接收数据。(工程名:int_test)
2.1 PA0设定为GPIO_EXTI0 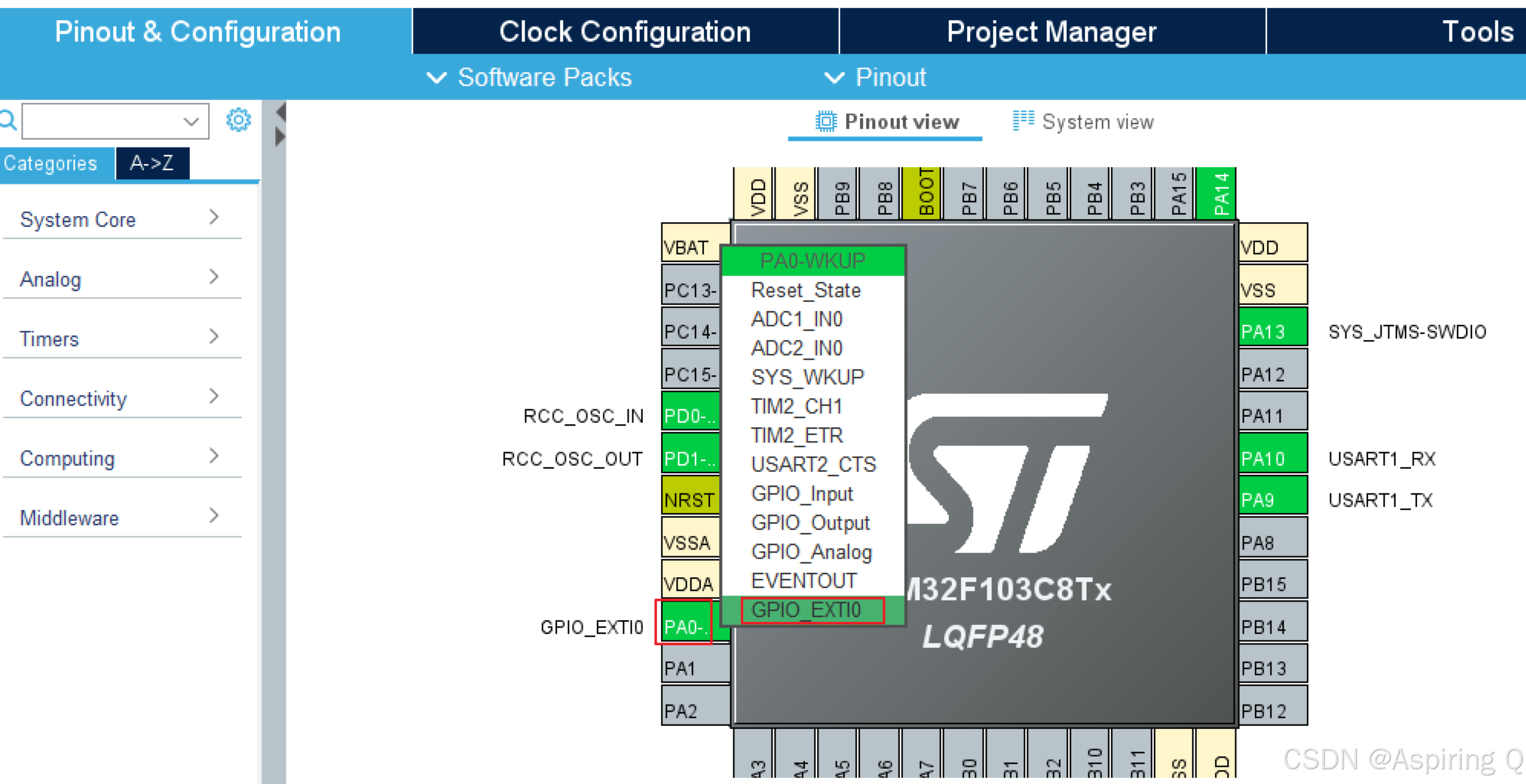
2.2 中断控制器NVIC中外部中断0设定为enable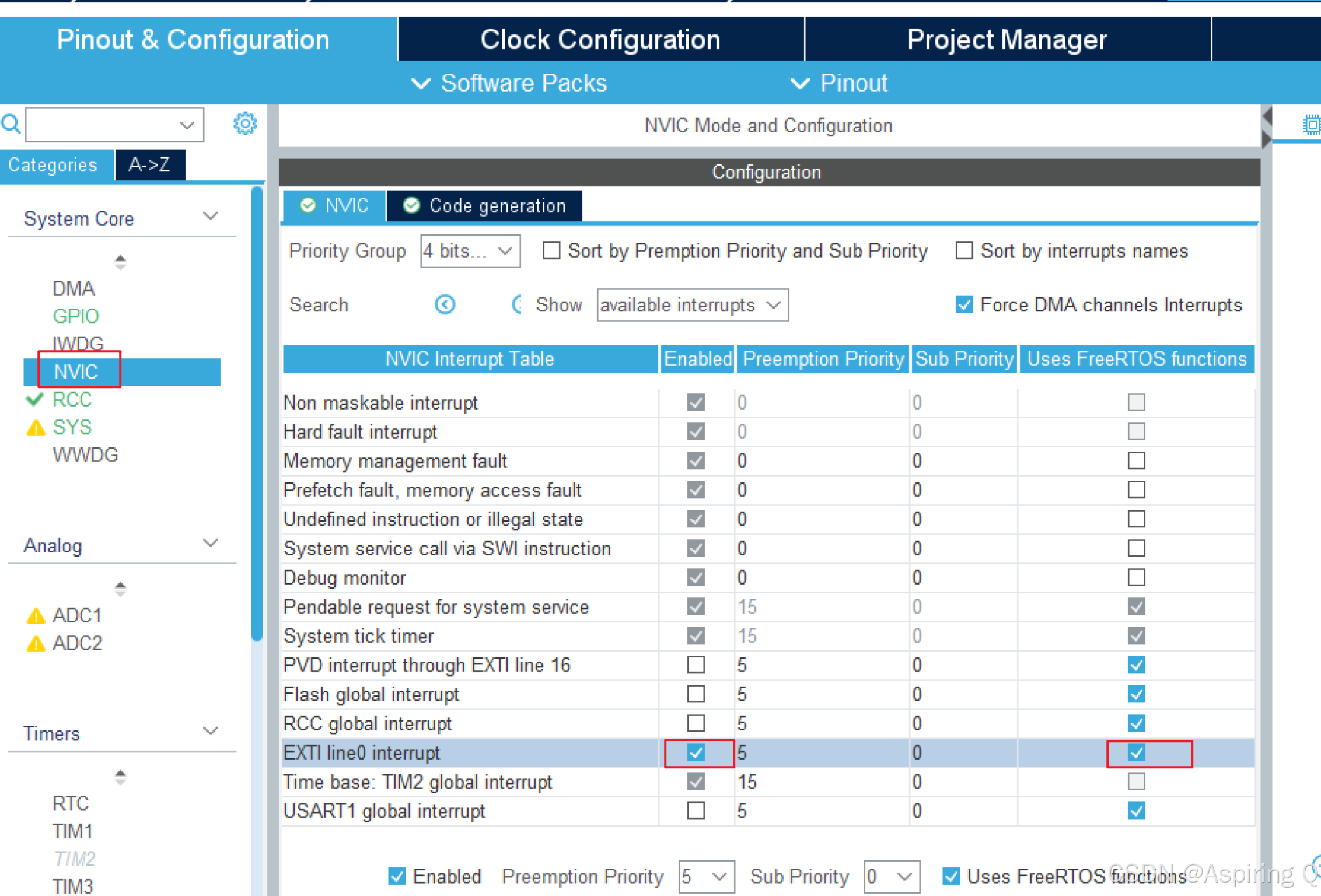
2.3 创建任务defaultTask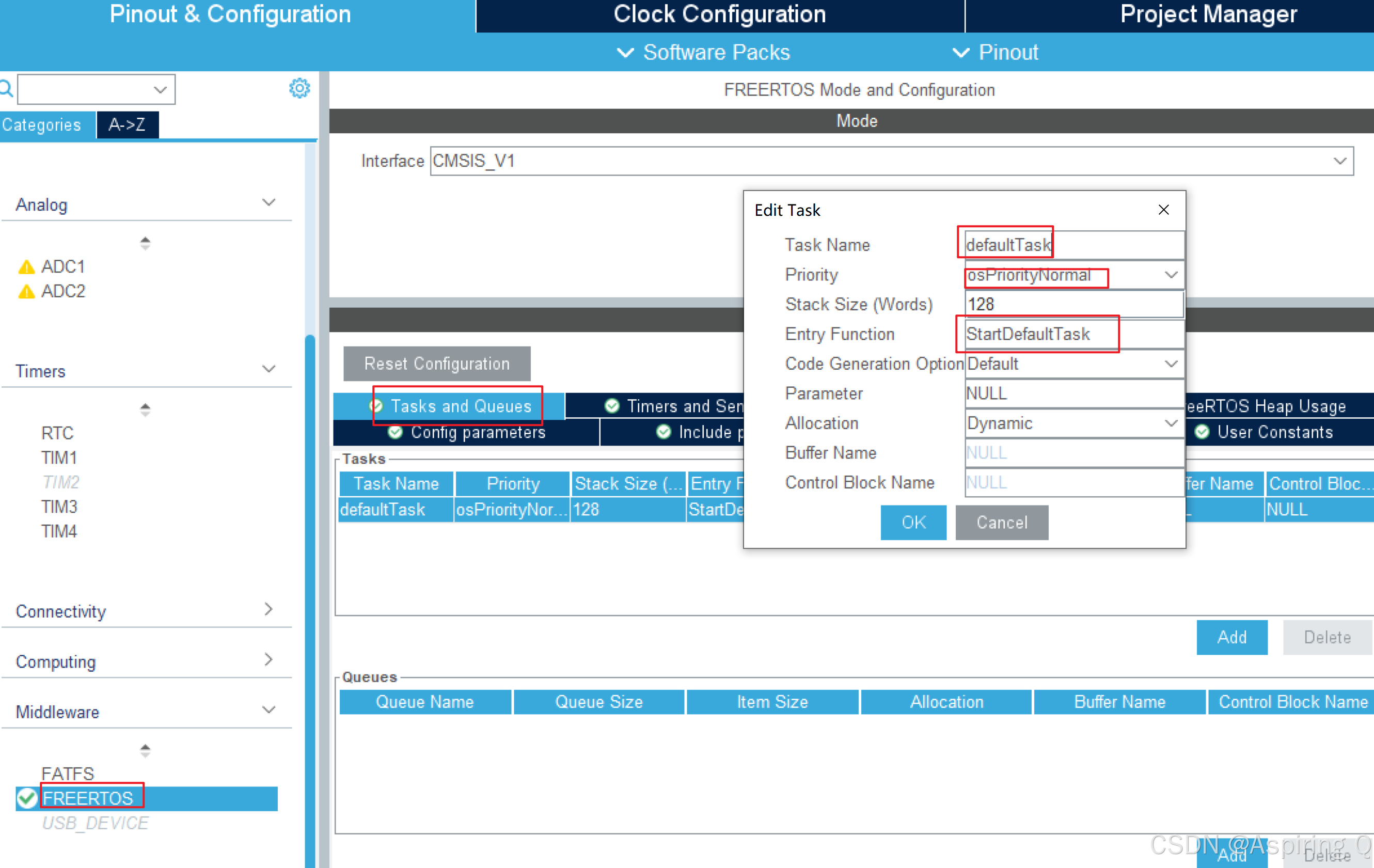
2.4 创建队列myQueue01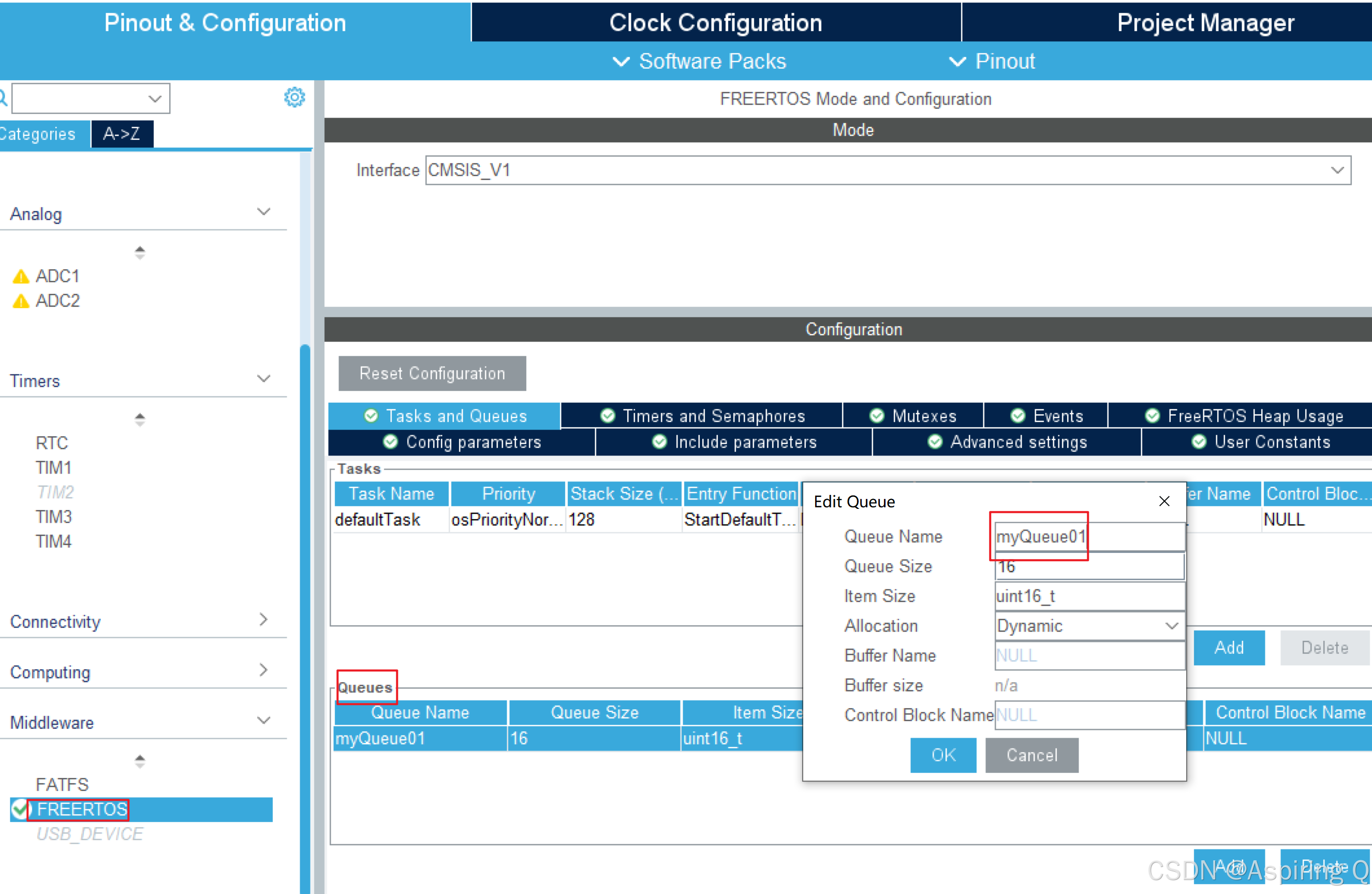
2.5 在freertos.c中编写代码
#include "stdio.h"
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
for(;;)
{
uint32_t rev = 0;
if(xQueueReceive(myQueue01Handle,&rev,portMAX_DELAY) == pdTRUE)
printf("rev=%d\r\n",rev);
osDelay(1);
}
/* USER CODE END StartDefaultTask */
}
在stm32f1xx_it.c中编写代码
#include "cmsis_os.h"
extern osMessageQId myQueue01Handle;
/* USER CODE BEGIN 1 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
uint32_t snd = 1;
xQueueSendFromISR(myQueue01Handle,&snd,NULL);
}
/* USER CODE END 1 */
2.6 结果显示:中断函数向队列中发送数据1,任务接收到队列中的数据1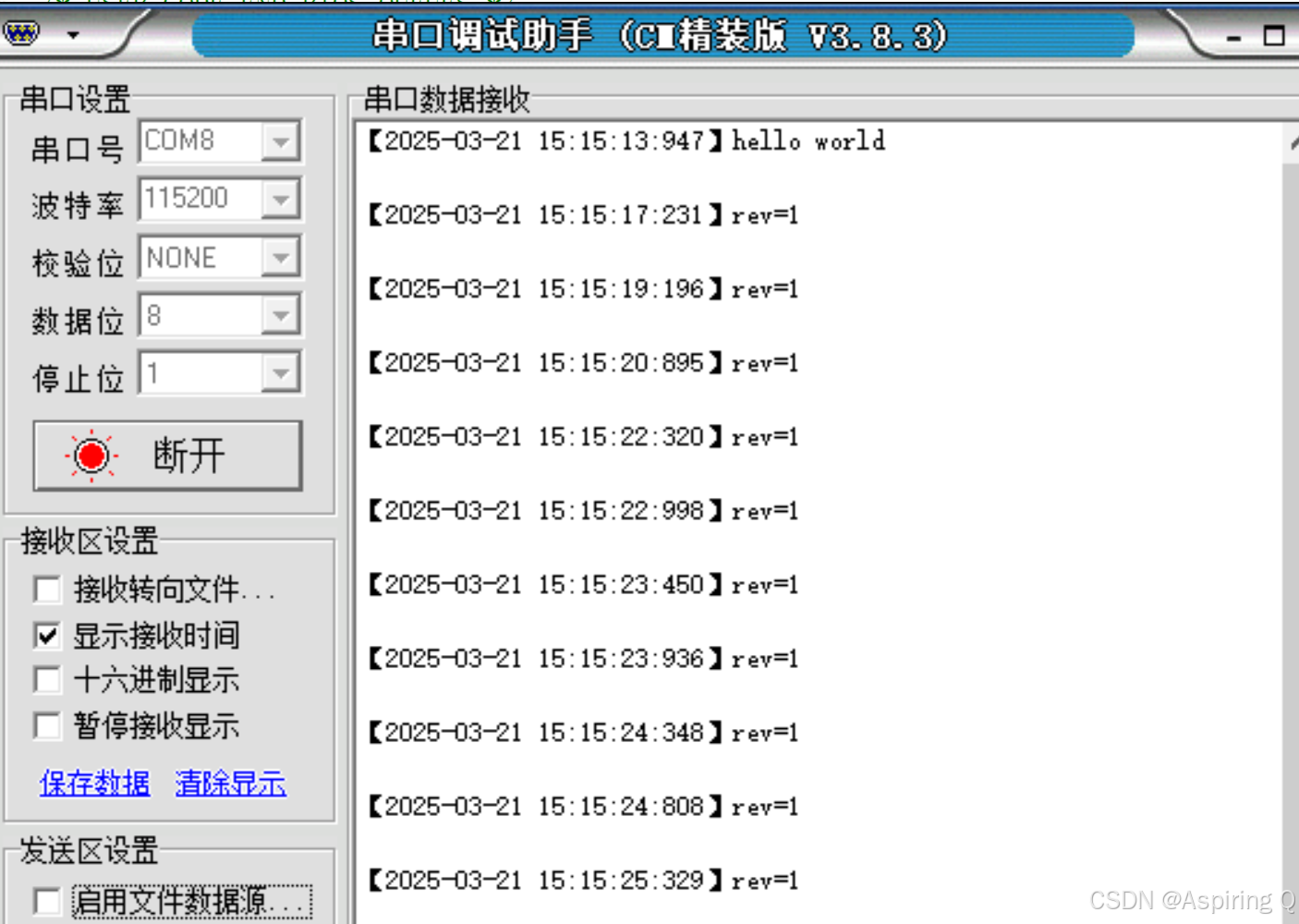

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 26
26 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)