虚拟机桥接mid360雷达,局域网配置步骤
本教程详细讲解如何在虚拟机中实现与Mid360激光雷达的桥接通信,解决开发者在虚拟化环境中部署雷达设备时常见的驱动兼容性、网络配置与实时数据传输难题
·
下面是配置mid360雷达的具体步骤:包括Livox-SDK2、Livox-ros-driver2、FAST-LIO算法
FXssthu/Sensor-communication-protocol: 介绍机器人中常见传感器的通信协议与配置
本文是前置网络需求配置:怎样使虚拟机和雷达进行局域网通信
备注:建议操作前先存个快照
大致步骤:
0.获取雷达IP(以mid360雷达为例:192.168.1.1xx,xx是S/N码最后两位)
1.配置主机以太网IP
2.配置虚拟机IP
3.雷达驱动配置,最终出现点云图像
1.配置主机以太网IP
控制面板---网络与Internet---网络与共享中心---更改适配器设置---打开以下页面
1.1找对雷达网线对应的以太网接口
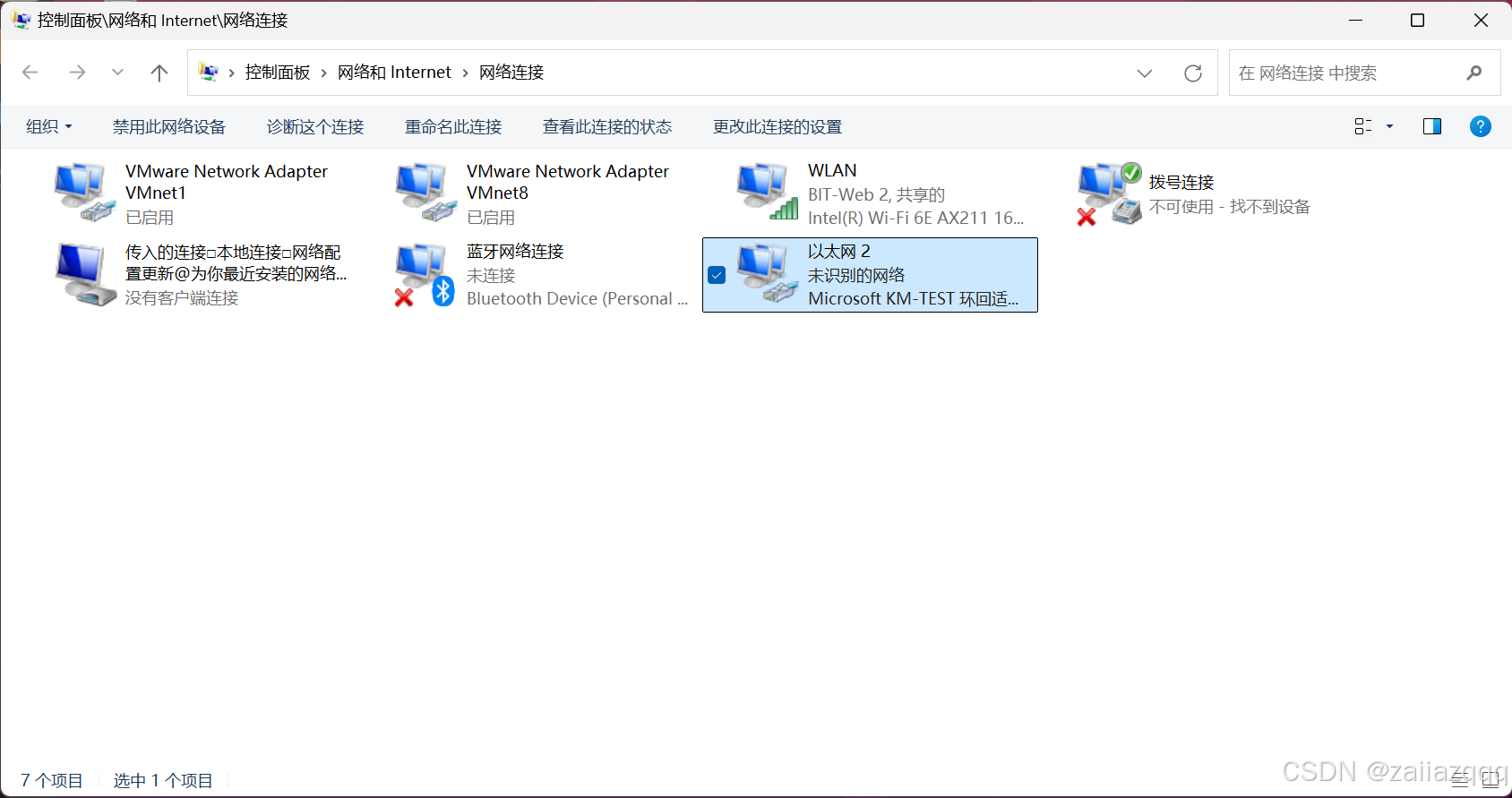
1.2双击对应以太网,选择属性

1.3选择IPV4选项,进行设置
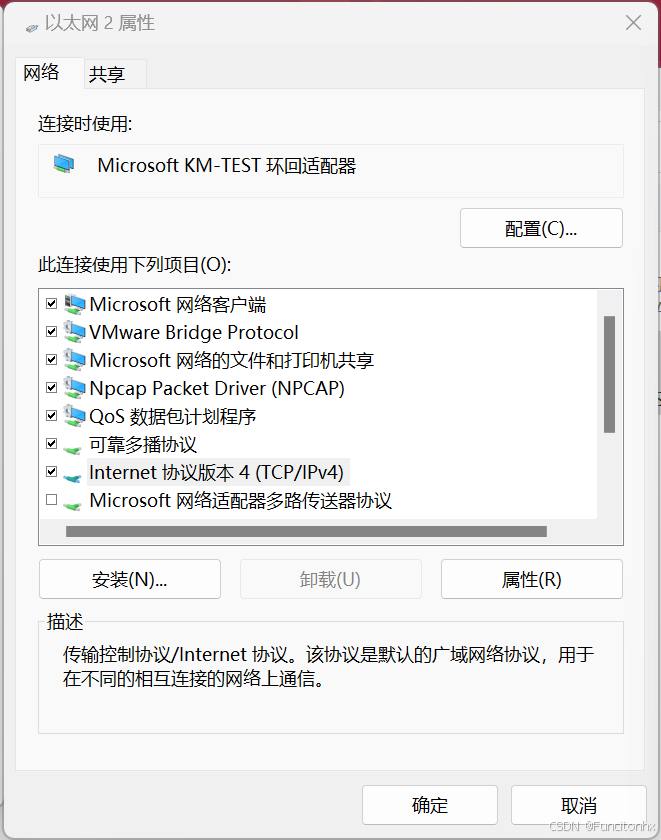
1.4手动配置IP地址和子网掩码,前三位和雷达IP相同,保证主机与雷达处于同一网段,最后一位什么都可以,其他配置选填

2.配置虚拟机IP
2.1改为桥接模式
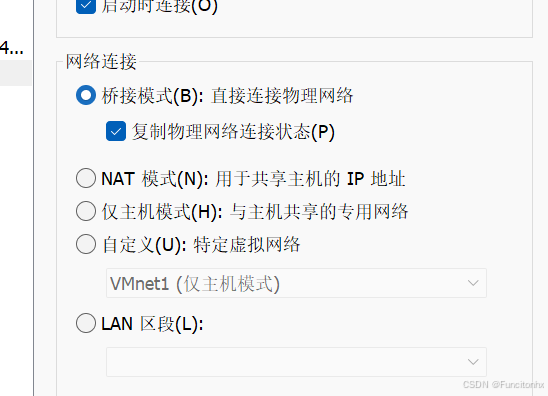
2.2修改虚拟网络编辑器桥接设置
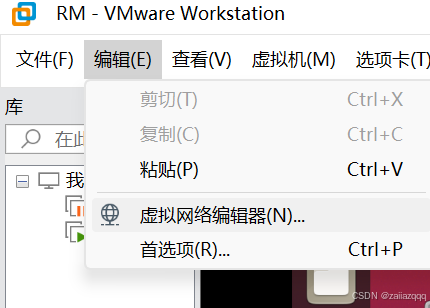
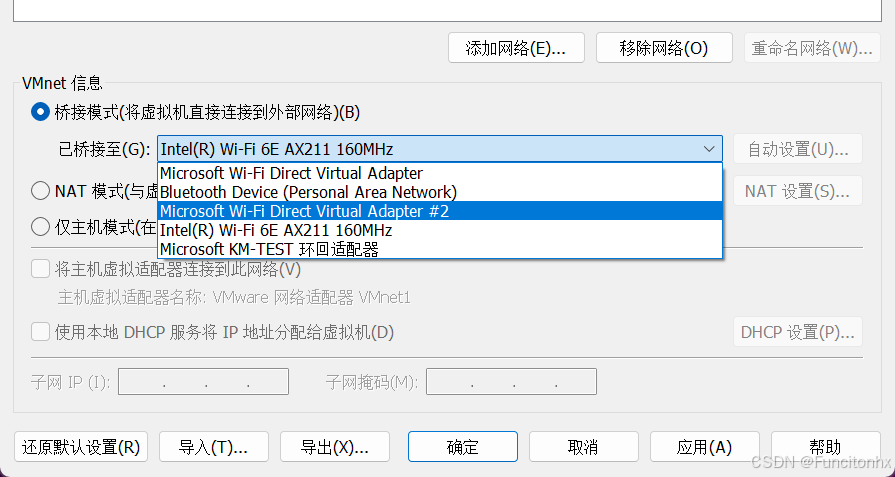
已桥接至(选择雷达对应以太网对应网卡),完成后点击“应用”。
2.3设置IPV4为手动,填写IP和子网掩码
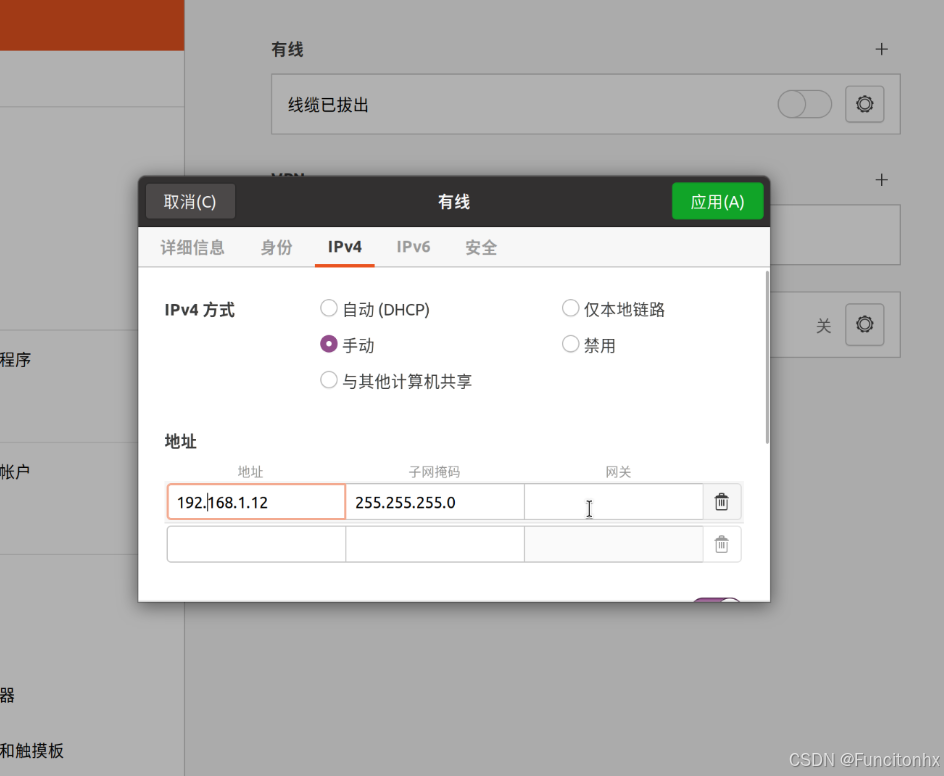
配置IP和子网掩码,IP第四段与雷达和主机IP不同,前三段相同,子网掩码为255.255.255.0
3.切换回NAT模式,重新连接网络
3.1.先切换回NAT模式
3.2.移除刚才的网络配置
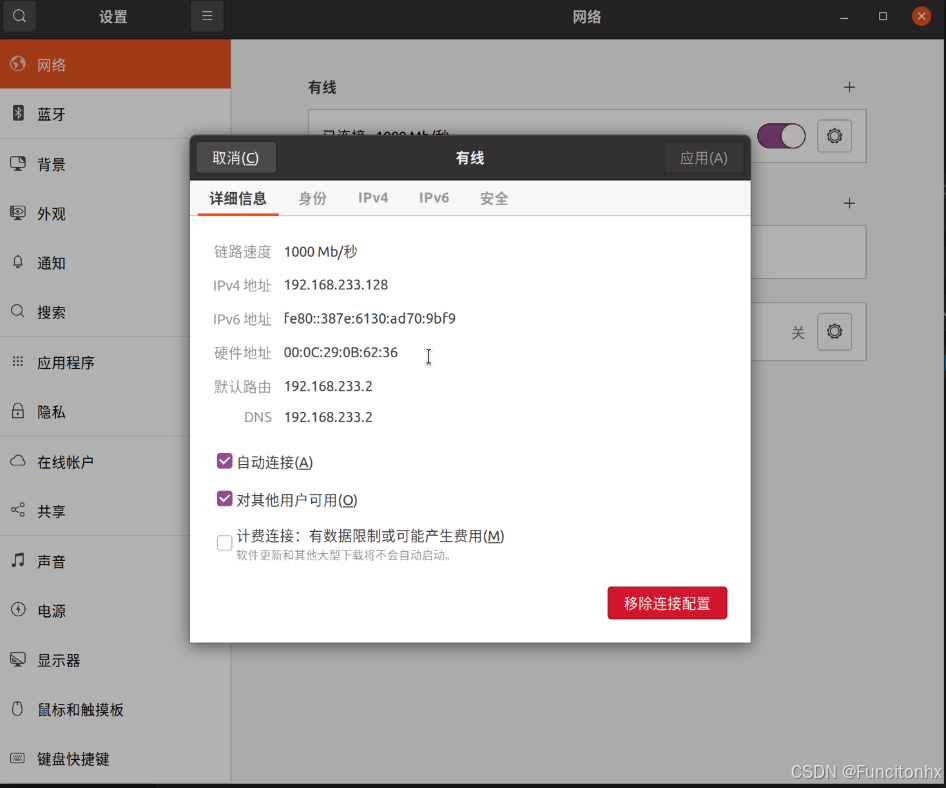
3.3 验证网络连接
方法一: ping www.baidu.com
方法二:sudo apt-get update

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 13
13 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)