蓝桥杯单片机刷题——NE555和光敏的采集与显示
通过PCF8591获取光敏电阻的电压数值。通过单片机的P34引脚测量NE555输出的脉冲信号。通过数码管完成试题要求的界面显示功能。通过指示灯实现界面指示功能。
·
要求:
设计要求
通过PCF8591获取光敏电阻的电压数值。
通过单片机的P34引脚测量NE555输出的脉冲信号。
通过数码管完成试题要求的界面显示功能。
通过指示灯实现界面指示功能。
显示要求
键值显示
数码管的第2、第3位固定显示当前按下的按键键值。

频率界面
频率界面由标识符(F)和频率值组成,频率单位为Hz,保留整数。显示如下图所示:

固定使用5位数码管显示频率数值,不足5位,高位(左侧)熄灭。
光照度界面
光照度界面由标识符(E)和光敏电阻电压值组成。电压单位为V,保留小数点后1位。显示如下图所示:

固定使用2位数码管显示光敏电阻电压值。
按键功能
有效按键:S8、S9、S12、S13,其余按键无任何功能。
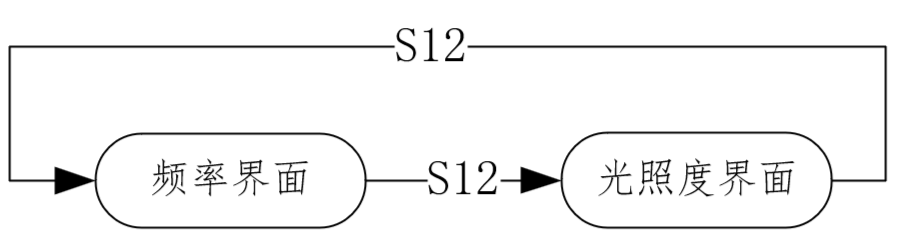
S12:“界面”按键,按下按键S12,实现“频率界面”和“光照度界面”界面切换功能,切换模式如下图所示:
指示灯功能
L1:频率界面指示灯,在“频率界面下”,指示灯L1点亮,否则熄灭;
L2:光照度界面指示灯,在“光照度界面下”,指示灯L2点亮,否则熄灭;
初始状态
处于频率界面。
无按键按下,即数码管第2、3位处于熄灭状态。
备注
单片机IRC振荡器频率设置为12MHz;
扩展模式:IO模式;
键盘模式:矩阵键盘。
代码:
sys.h
#ifndef __SYS_H__
#define __SYS_H__
#include <STC12C5A60S2.H>
#include "intrins.h"
extern bit UI;//界面标志
extern unsigned char Seg_Buff[8];//数码管缓冲区
extern unsigned int ne555_count;//NE555计数值即频率
extern float pcf8591_count;//PCF8591计数值即光敏电阻电压值
extern unsigned char keynum;//按键值
void init74hc138(unsigned char n);//选通
void init();//系统初始化
float V_rd1();//电压转换
void Seg_Loop();//数码管刷新
void seg_ui();//数码管界面显示
void seg_key();//数码管按键显示
void Key_Loop();//按键动态扫描
void led_ui();//led界面标记
#endifmain.c
#include "sys.h"
bit flag_ne=0;
bit flag_v=0;
bit flag_seg=0;
bit flag_key=0;
//定时器0作为计数器
void Timer0_Init(void) //100微秒@12.000MHz
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x05;//设置为计数器模式
TL0 = 0x00;
TH0 = 0x00;
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
EA=1;
}
void Timer1_Init(void) //1毫秒@12.000MHz
{
AUXR |= 0x40; //定时器时钟1T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x20; //设置定时初始值
TH1 = 0xD1; //设置定时初始值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
ET1 = 1; //使能定时器1中断
EA=1;
}
unsigned int get_count(){
unsigned int temp;
temp=TH0<<8|TL0;
TH0=0x00;
TL0=0x00;
if(TF0){//说明溢出
TF0=0;
return 0xffff;
}else{
return temp;
}
}
void main(){
init();
Timer0_Init();
Timer1_Init();
while(1){
if(flag_key){
flag_key=0;
Key_Loop();
seg_key();
led_ui();
}
if(flag_seg){
flag_seg=0;
Seg_Loop();
}
if(flag_ne){
flag_ne=0;
ne555_count=get_count();
seg_ui();
}
if(flag_v){
flag_v=0;
pcf8591_count=V_rd1();
seg_ui();
}
}
}
void Timer1_Isr(void) interrupt 3
{
static unsigned int count1=0,count2=0;
static unsigned char count3=0,count4=0;
count1++;count2++;count3++;count4++;
if(count1==1000){//计时1s
count1=0;
flag_ne=1;
}
if(count2==500){
count2=0;
flag_v=1;
}
if(count3==2){
count3=0;
flag_seg=1;
}
if(count4==50){
count4=0;
flag_key=1;
}
}sys.c
#include "sys.h"
unsigned int ne555_count;
float pcf8591_count;
void init74hc138(unsigned char n){
P2=(P2&0x1f)|(n<<5);
P2=0x1f;
}
void init(){
P0=0x00;
init74hc138(5);
P0=0xff;
init74hc138(4);
}
void led(unsigned char n){
P0=0x01<<n-1;
P0=~P0;
init74hc138(4);
P0=0xff;
}
void led_ui(){
if(UI){
led(2);
}else{
led(1);
}
}seg_ui.c
#include "sys.h"
code unsigned char Seg_Table[] =
{
0xc0, //0
0xf9, //1
0xa4, //2
0xb0, //3
0x99, //4
0x92, //5
0x82, //6
0xf8, //7
0x80, //8
0x90, //9
0x86, //E 10
0x8e, //F 11
0xff //熄灭 12
};
unsigned char Seg_Buff[]={12,12,12,12,12,12,12,12};
bit UI=0;//界面标志
void seg(unsigned char addr,unsigned char num){
P0=0xff;
init74hc138(7);
P0=0x01<<addr;
init74hc138(6);
P0=Seg_Table[num];
if(UI&&addr==6){
P0&=0x7f;
}
init74hc138(7);
}
void seg_key(){
if(keynum==0)return;
if(keynum>=10)
Seg_Buff[1]=keynum/10;
else
Seg_Buff[1]=12;
Seg_Buff[2]=keynum%10;
}
//void no_seg_key(){
// Seg_Buff[1]=12;
// Seg_Buff[2]=12;
//}
void seg_u1(){//UI=0时,处于频率界面
Seg_Buff[7]=ne555_count%10;
if(ne555_count>=10)
Seg_Buff[6]=ne555_count/10%10;
else
Seg_Buff[6]=12;
if(ne555_count>=100)
Seg_Buff[5]=ne555_count/100%10;
else
Seg_Buff[5]=12;
if(ne555_count>=1000)
Seg_Buff[4]=ne555_count/1000%10;
else
Seg_Buff[4]=12;
if(ne555_count>=10000)
Seg_Buff[3]=ne555_count/10000%10;
else
Seg_Buff[3]=12;
Seg_Buff[0]=11;//F
}
void seg_u2(){//UI=1时,处于光照界面
Seg_Buff[7]=(unsigned char)(pcf8591_count*10)%10;
Seg_Buff[6]=(unsigned char)(pcf8591_count*10)/10;
Seg_Buff[5]=12;
Seg_Buff[4]=12;
Seg_Buff[3]=12;
Seg_Buff[0]=10;//E
}
void seg_ui(){
if(UI){
seg_u2();
}else{
seg_u1();
}
}
void Seg_Loop(){
static unsigned char i=0;
seg(i,Seg_Buff[i]);
i++;
if(i==8)i=0;
}key.c
#include "sys.h"
unsigned char keyval,keyold,keyup,keydown,keynum=0;
unsigned char Key_Scan(){
P42=0;P35=1;
if(P33==0)return 8;
if(P32==0)return 9;
P35=0;P42=1;
if(P33==0)return 12;
if(P32==0)return 13;
return 0;
}
void Key_Loop(){
keyval=Key_Scan();
keydown=keyval&(keyold^keyval);
keyup=~keyval&(keyold^keyval);
if(keyval==8&&keyold!=keyval){keynum=8;keyold=keyval;return;}
if(keyval==9&&keyold!=keyval){keynum=9;keyold=keyval;return;}
if(keyval==13&&keyold!=keyval){keynum=13;keyold=keyval;return;}
if(keyval==12&&keyold!=keyval){UI=~UI;keynum=12;keyold=keyval;return;}
keynum=0;
keyold=keyval;
}iic.c
#include "sys.h"
#define DELAY_TIME 5
sbit scl=P2^0;
sbit sda=P2^1;
static void I2C_Delay(unsigned char n)
{
do
{
_nop_();_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();_nop_();
}
while(n--);
}
void I2CStart(void)
{
sda = 1;
scl = 1;
I2C_Delay(DELAY_TIME);
sda = 0;
I2C_Delay(DELAY_TIME);
scl = 0;
}
void I2CStop(void)
{
sda = 0;
scl = 1;
I2C_Delay(DELAY_TIME);
sda = 1;
I2C_Delay(DELAY_TIME);
}
void I2CSendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++){
scl = 0;
I2C_Delay(DELAY_TIME);
if(byt & 0x80){
sda = 1;
}
else{
sda = 0;
}
I2C_Delay(DELAY_TIME);
scl = 1;
byt <<= 1;
I2C_Delay(DELAY_TIME);
}
scl = 0;
}
unsigned char I2CReceiveByte(void)
{
unsigned char da;
unsigned char i;
for(i=0;i<8;i++){
scl = 1;
I2C_Delay(DELAY_TIME);
da <<= 1;
if(sda)
da |= 0x01;
scl = 0;
I2C_Delay(DELAY_TIME);
}
return da;
}
unsigned char I2CWaitAck(void)
{
unsigned char ackbit;
scl = 1;
I2C_Delay(DELAY_TIME);
ackbit = sda;
scl = 0;
I2C_Delay(DELAY_TIME);
return ackbit;
}
void I2CSendAck(unsigned char ackbit)
{
scl = 0;
sda = ackbit;
I2C_Delay(DELAY_TIME);
scl = 1;
I2C_Delay(DELAY_TIME);
scl = 0;
sda = 1;
I2C_Delay(DELAY_TIME);
}
//从ADC读取数值
unsigned char adc(unsigned char addr){
unsigned char temp;
EA=0;
I2CStart();
I2CSendByte(0x90);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CStart();
I2CSendByte(0x91);
I2CWaitAck();
temp=I2CReceiveByte();
I2CWaitAck();
I2CSendAck(1);
I2CStop();
EA=1;
return temp;
}
//将读到的数值转化为电压值
float V_rd1(){
float vrd1;
vrd1=(float)adc(1)*5.0/255+0.05;
return vrd1;
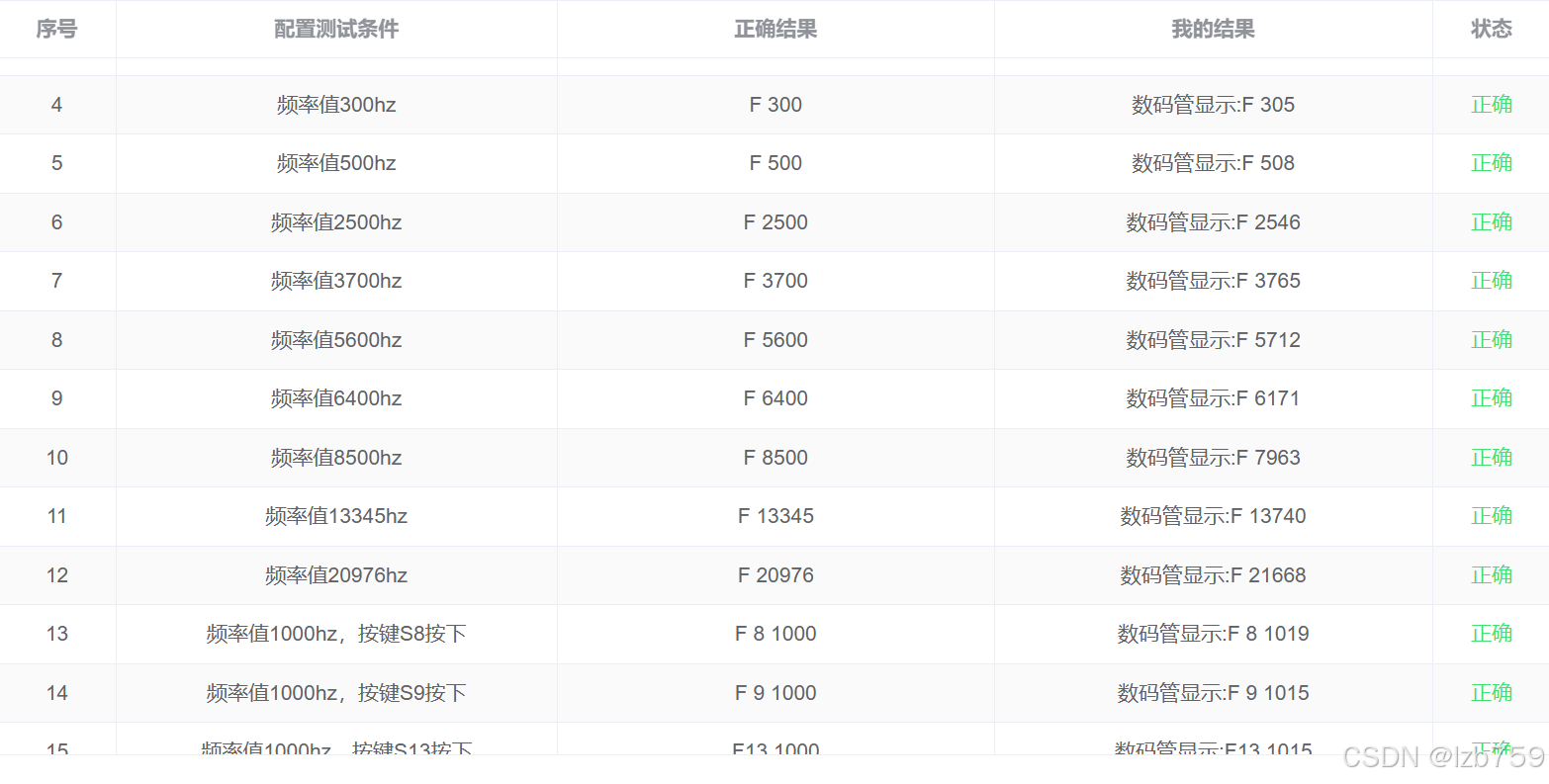
}测试结果

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 21
21 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)