STM32F103C8T6单片机开发:使用GPIO输入模式完成按键的检测(HAL库版本)
上一节博客中,我们使用了GPIO的推完输出模式,完成了LED的驱动,我们基本上见识道了GPIO中的“输出”功能,但是这个还没有完事,我们还有一个输入没有说明呢!因此,我们这个文档,实际上就是在说明输入模式的使用。
目录
前言
上一节博客中,我们使用了GPIO的推完输出模式,完成了LED的驱动,我们基本上见识道了GPIO中的“输出”功能,但是这个还没有完事,我们还有一个输入没有说明呢!因此,我们这个文档,实际上就是在说明输入模式的使用。
GPIO的输入模式
我们下面就来完成GPIO的输入模式的样例编程。还是一样,为了理解,我们需要好好设计一下实验完成我们的工作。笔者需要再强调一次——对任何外设器件编程,你首先需要关心它的编程模型是什么,换而言之,你需要理解它的引脚的特性。对于按钮,我们知道,按钮在默认的情况下是断开的,由按钮,引脚,单片机的VCC或GND构成了一个断开的通路,你看:
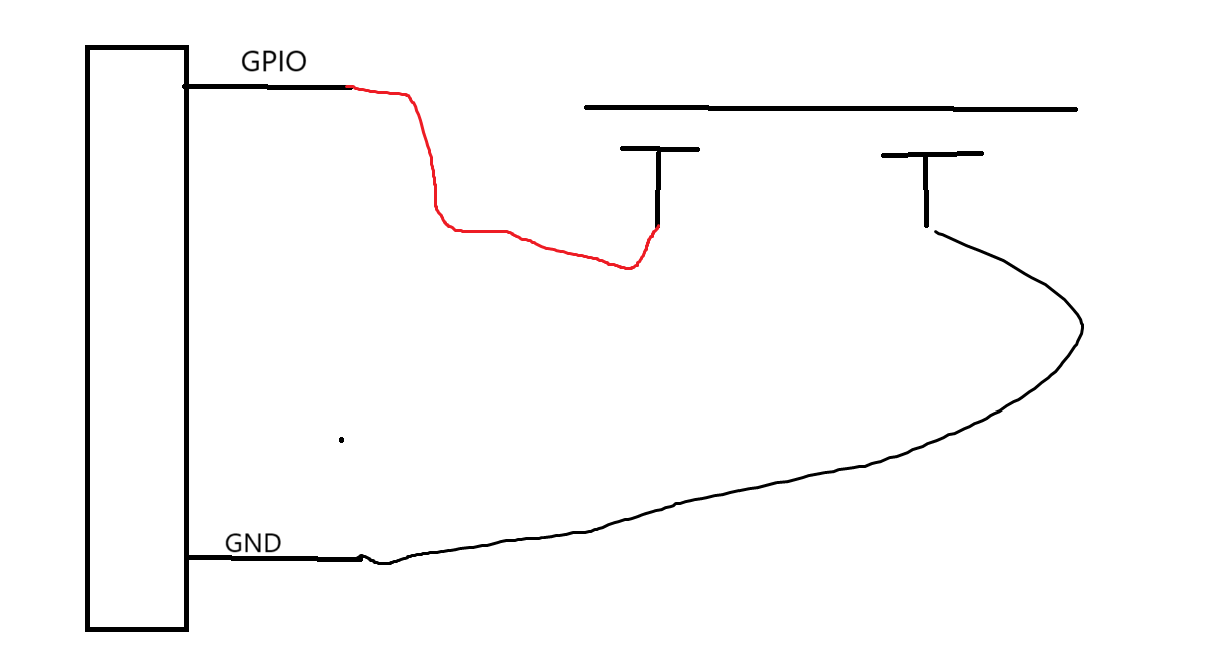
当我们的弹片摁下去之后,很显然,回路导通,这个时候,我们亲爱的GPIO就会收到一个低电平。这个毫无疑问,所以,我们得到了一个重要的结论,在上面这个图示的情况下,我们的按钮按下,等价于GPIO接受到了一个低电平,当我们的程序逻辑判断得到了——GPIO读取道了一个低电平的时候,我们就认为按钮摁下,我们的程序也就跟现实的物理电路联系了起来!
那问题来了,我们如何设置GPIO为输入模式呢?答案也是简单的,只需要更改我们的GPIO_Mode就好了,对于按钮,我们选择上一个博客中谈到的:GPIO_Mode_IPU就好了,还是一样,为什么是这个,我们会在后面进行说明。
从头捋一次:我们操作GPIO,实际上就是按照如下的步骤:
-
打开GPIO对应的时钟
-
对于标准库,使用GPIO_InitTypeDef来配置GPIO,之后使用GPIO_Init提交我们的修改
-
使用GPIO来驱动简单的外设或者是接受我们外部电路的变化电平信号
下面我们就会来尝试一下我们的功能。笔者列写我们的电路连接清单。
| 器件的引脚 | 连接到的端口 |
|---|---|
| LED的长引脚(正极) | PA1 |
| LED的短引脚(负极) | GND |
| 按钮的一个引脚(无所谓正负极) | PB1 |
| 按钮的另一个引脚(无所谓正负极) | GND |
笔者修改了一下连接的端口,就是想考察你对端口和引脚的关系有没有正确理解。好,我们下面就开始编程吧。
编程启动!
void init_bsp_key()
{
GPIO_InitTypeDef gpio_init_struct;
__HAL_RCC_GPIOB_CLK_ENABLE();
gpio_init_struct.Pin = GPIO_PIN_1;
gpio_init_struct.Mode = GPIO_MODE_INPUT;
gpio_init_struct.Pull = GPIO_PULLUP;
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &gpio_init_struct);
}这里需要注意两个重要的点:
-
第一个点:模式需要选择GPIO_Mode_IPU,这里的I是Input, PU是什么?PullUp,我可以先告诉你,当然这里的上拉(一个相似的词是下拉)是什么意思,如果你电路学的好估计已经搞懂了,不懂不着急,GPIO的原理部分我会好好讲述的。
-
我们的按钮是GPIOB的Pin1引脚,请注意,千万不要写错地方了
检测按钮触发
按钮触发检测是一个很大的话题,实际上,甚至直到我们完成了GPIO原理说明后的GPIO中断,我们还会回来讨论这个话题,按钮的按下状态检测更是一个设计到状态机编程的话题,这个就属于笔者比较擅长的领域了,我会在其他文件中好好分析这个事情,但不是现在,我怕把萌新吓跑了就没意思了。
在这里,我们思考,如何检测,何时检测按钮按下呢?先不要想着那么复杂。假设你是一个保安,你的工作就是轮询着站在岗位上,观察周边的情况。如果你还记得微机原理,这就是轮循的检测手法
while(1)
{
uint8_t isdone = detect_done(); // 你做了吗
if(isdone) do_done_issue(); // 触发了,处理逻辑
else do_undone_issue(); // 没有触发,做其他逻辑
}当然代价是显然的——没有办法做任何其他更加分神的事情,哦,也许躺一下是可以的,但是睡着那是不行的。因为do_undone_issue或者是detect_done拖的过长,你没法检测频繁的按钮输入,在一些场景下又是不被接受的。这个事情我们还会有其他的解决方案,这里我们只是一个点灯小子,没必要在这里絮絮叨叨。
我猜测会有单片机大蛇来这里炸鱼,笔者说说我的看法:
轮循是最糟糕的编程方案,它简直把CPU分身了
使用GPIO中断是一个尚可的方案,因为我们的按钮是突发事件,而不是一个每时每刻发生的事情,就像没有人喜欢一个神经病絮絮叨叨问你“你吃没吃饭啊,我这里有一个面包”,你说没有后立马又问“你吃没吃饭啊,我这里有一个面包”。。。GPIO中断通知引脚的电平变化,向单片机传递了一个事件后,我们只需要处理事件发生后需要作什么即可
定时器中断是一个更好的方案,因为,GPIO中断是存在相同Pin引脚无法区分,总会存在这样的场景,我们把按钮接入到了PB0和PA0上,我们无法依靠GPIO中断本身来薄记到底是哪一个Pin引脚整活了,但是定时器中断却没有这个问题,只需要在触发溢出/更新中断的时候直接执行定时器的Callback(回调函数)就好了
如果存在RTOS对单片机时间片的分时机制,那我们采用轮循也许更是一个好办法,这也算是大道轮回了,我们只需要分出时间片来检测我们的按钮是否活跃(被按下)即可。
萌新可能看不大懂我在说什么,不需要着急,所有的内容很快就会讲授,GPIO中断在GPIO原理分析的下一个章节,定时器在GPIO中断之后,RTOS是额外的篇章部分。
下一步,我们按照轮循的编程模型,进一步完成对单片机的逻辑书写
while(1)
{
if(isKeyPressed()){
led_flippings();
}
}你看,我们的编程模型就是被化简成这样的——如果我们的按钮按下了,那就执行翻转GPIO的逻辑,反之,不做任何事情,立马回来检测按钮是否被嗯下了。思考这样的逻辑的时候,想象你就是单片机,你一行一行的看C代码,观察你要执行什么,你要做什么,这样就会对程序发生了什么存在掌控力了。
基于上述事情,我们的工作流被分成两个部分——一个是我们早就写好的翻转PA1的GPIO,这个熟悉C语言的大伙只需要做如下的事情就完事了
static void led_flippings()
{
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_1);
HAL_Delay(500);
}但是按键检测呢,我们上面说过,我们的编程模型是——检测到低电平就说明了按键被按下了。因此,使用一个函数来读取GPIO电平的高低,我们的事情就解决了。
在库函数中,使用HAL_GPIO_ReadPin来完成对一个引脚高低电平的读取,
static uint8_t isKeyPressed()
{
return HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1) == GPIO_PIN_RESET;
}HAL_GPIO_ReadPin将我们的引脚电平读入进来,低电平,我们在上一篇博客就说过了,就是0,所以判断的最好办法就是判断它是不是为0.笔者这里却没有写0,而是GPIO_PIN_RESET,这个是从哪里看出来的呢?
如何保证自己写的程序一定不会出现语义缺失?那就是使用库编程约束的规范——使用人家的东西就用到底,不要想当然!
typedef enum { GPIO_PIN_RESET = 0u, GPIO_PIN_SET } GPIO_PinState;GPIO_PinState是HAL库对GPIO电平的抽象,显然,GPIO_PIN_RESET态就是低电平,反之,GPIO_PIN_SET就是高电平,这个没啥好说的。
整个程序的全貌变得非常的显然
#include "stm32f1xx_hal.h"
#include "system_clock.h"
void init_led()
{
GPIO_InitTypeDef gpio_init_struct;
__HAL_RCC_GPIOA_CLK_ENABLE();
gpio_init_struct.Pin = GPIO_PIN_1; /* LED0引脚 */
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(GPIOA, &gpio_init_struct); /* 初始化LED0引脚 */
}
void init_bsp_key()
{
GPIO_InitTypeDef gpio_init_struct;
__HAL_RCC_GPIOB_CLK_ENABLE();
gpio_init_struct.Pin = GPIO_PIN_1;
gpio_init_struct.Mode = GPIO_MODE_INPUT;
gpio_init_struct.Pull = GPIO_PULLUP;
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &gpio_init_struct);
}
static uint8_t isKeyPressed()
{
return HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1) == GPIO_PIN_RESET;
}
static void led_flippings()
{
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_1);
HAL_Delay(500);
}
int main()
{
HAL_Init();
sys_stm32_clock_init(RCC_PLL_MUL9);
init_led();
init_bsp_key();
while(1)
{
if(isKeyPressed()){
led_flippings();
}
}
}-
下载程序,默认的行为上,灯并不会亮,直到你按下按钮,你会发现LED开始闪烁,按一下,闪一次。(没有放置图像是因为不太好拍)
-
在1s内的按钮按下,你会发现程序并不会理睬,因为我们使用的是轮循,当CPU跑去做别的事情的时候,他并不会检测按钮的事件,直到它回来了。
到这里,我们的GPIO的输入和输出算是做完了。我们下一个篇章,就是对GPIO的介绍了。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 18
18 0
0- 0



 已为社区贡献64条内容
已为社区贡献64条内容

所有评论(0)