Hi3861 通过串口控制 SG90 舵机转动角度
说明:2根线号线,TXD(发送),RXD(接收),TXD要接到单片机的RXD上,RXD要接到单片机的TXD上,GND(接地)要跟单片机的GND端连接。用串口通信工具连接控制舵机的串口,输入1个数值,点击发送,只要是0-180,单片机会控制舵机转到输入的角度,并把结果通过串口回传回来。说明:舵机有3条线,2条(VCC, GND)接单片机的电源接口上,VCC接在5V端口上,1条(脉冲信号)接单片机的端
完整接线图
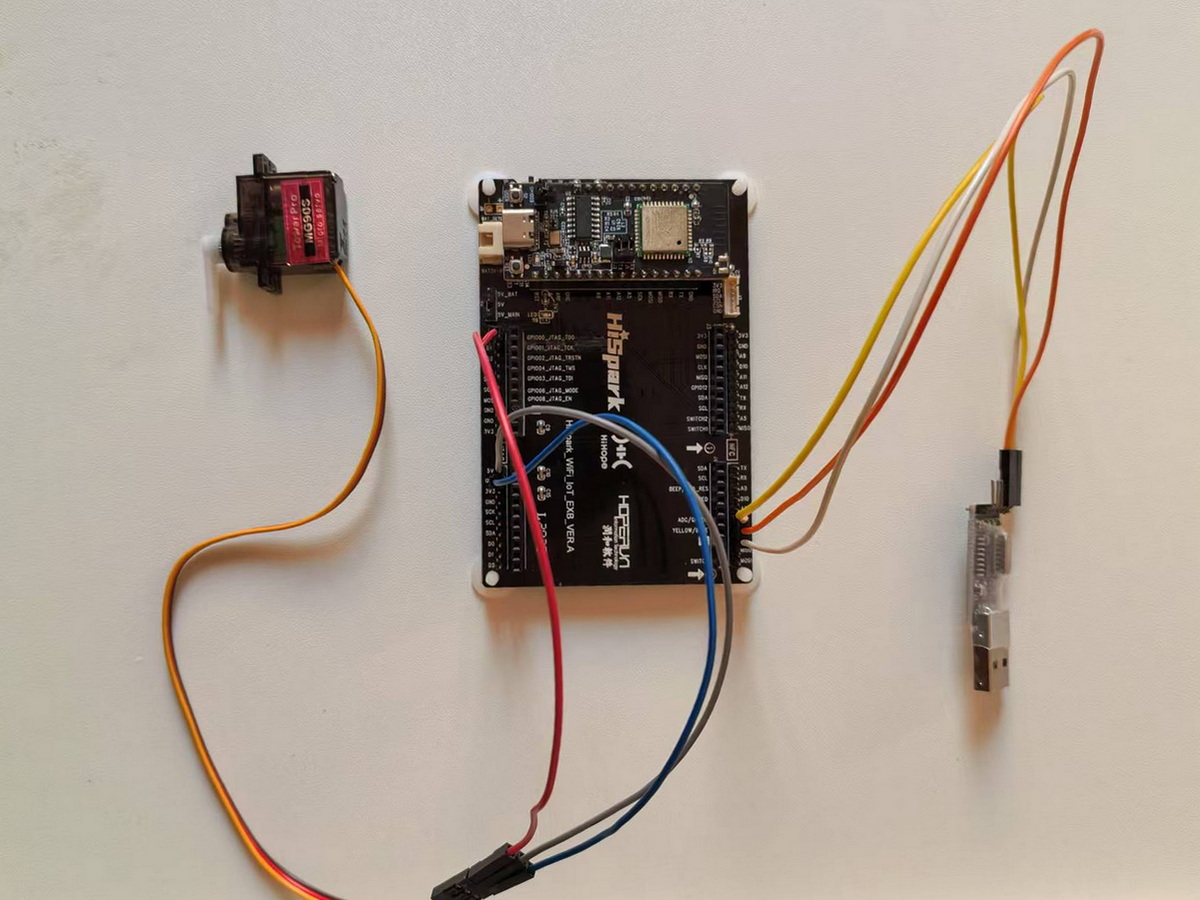
接线
串口模块接线:
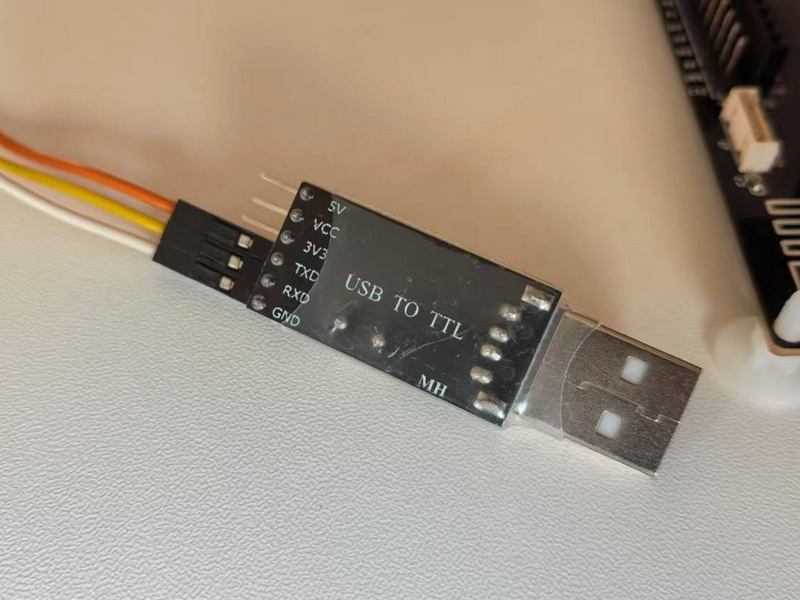
说明:2根线号线,TXD(发送),RXD(接收),TXD要接到单片机的RXD上,RXD要接到单片机的TXD上,GND(接地)要跟单片机的GND端连接。
舵机接线:
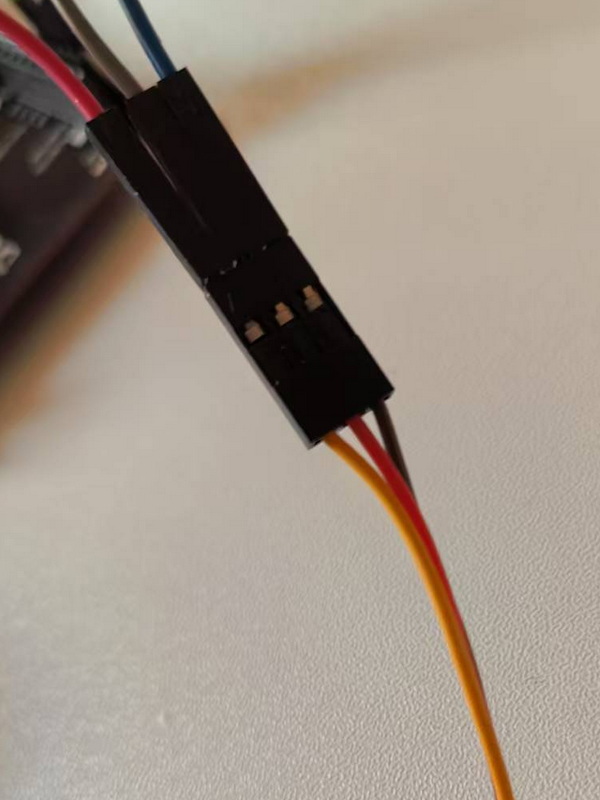
说明:舵机有3条线,2条(VCC, GND)接单片机的电源接口上,VCC接在5V端口上,1条(脉冲信号)接单片机的端口上。
代码
目录结构
└─uart_sg90_test
BUILD.gn
entry.c
sg90.c
sg90.h
uart.c
uart.h串口设置 uart.h
#ifndef __UART_H__
#define __UART_H__
// 串口 端口
#define UART_IDX HI_UART_IDX_2
// 串口 TX 管脚编号
#define UART_TXD_NAME HI_IO_NAME_GPIO_11
#define UART_TXD_FUNC HI_IO_FUNC_GPIO_11_UART2_TXD
// 串口 RX 管脚编号
#define UART_RXD_NAME HI_IO_NAME_GPIO_12
#define UART_RXD_FUNC HI_IO_FUNC_GPIO_12_UART2_RXD
// 串口 设置
void Uart_Init(void);
// 串口 读数据 buff 读入数据缓存 size 缓存大小
int Uart_Read_Data(char *buff, int size);
// 串口 输出数据 data 要输出的字符串 size 输出字符串大小
int Uart_Write_Data(char *data, int size);
#endif使用的端口是,TX (GPIO 11), RX (GPIO 12), 11 接 串口模块 RX, 12接 串口模块 TX。
uart.c
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "ohos_init.h"
#include "cmsis_os2.h"
#include "iot_gpio.h"
#include "hi_types_base.h"
#include "hi_errno.h"
#include "hi_io.h"
#include "hi_gpio.h"
#include "hi_time.h"
#include "hi_uart.h"
#include "uart.h"
// 串口 设置
void Uart_Init(void)
{
// 设置 端口 功能
hi_io_set_func(UART_TXD_NAME, UART_TXD_FUNC);
hi_io_set_func(UART_RXD_NAME, UART_RXD_FUNC);
// 串口 通信 设置
hi_uart_attribute uart_attr = {
.baud_rate = 115200, // 波特率
.data_bits = 8, // 数据位
.stop_bits = 1, // 停止位
.parity = 0, // 奇偶校验位
};
// 非 阻塞 模式
hi_uart_extra_attr extra_attr = {
.tx_block = HI_UART_BLOCK_STATE_NONE_BLOCK, // TX 非阻塞传输
.rx_block = HI_UART_BLOCK_STATE_NONE_BLOCK, // RX 非阻塞传输
};
// 串口 初始化
if(hi_uart_init(UART_IDX, &uart_attr, &extra_attr) != HI_ERR_SUCCESS)
{
printf(" [hi_uart_init ] FAILURE! \n");
return;
}
}
// 串口 读取数据 buff 读入数据缓存 size 缓存大小
int Uart_Read_Data(char *buff, int size)
{
int len = hi_uart_read(UART_IDX, buff, size);
if(len > 0)
{
printf(" [Uart_Read_Data] len = %d , buff = %s \n", len, buff);
}
return len;
}
// 串口 输出数据 data 要输出的字符串 size 输出字符串大小
int Uart_Write_Data(char *data, int size)
{
int len = hi_uart_write(UART_IDX, data, size);
if(len > 0)
{
printf(" [Uart_Write_Data] len = %d , data = %s \n", len, data);
}
// 输出 换行符
char lf[2] = {'\r', '\n'};
hi_uart_write(UART_IDX, lf, 2);
return len;
}
舵机设置 sg90.h
#ifndef __SG90_H__
#define __SG90_H__
// 针脚 端口 功能 配置
#define SG90_IO_NAME HI_IO_NAME_GPIO_0
#define SG90_IO_FUNC HI_IO_FUNC_GPIO_0_GPIO
#define SG90_GPIO_ID HI_GPIO_IDX_0
// sg90 舵机 端口 初始化
void SG90_Init(void);
// sg90 舵机 角度
void SG90_Angel(hi_gpio_idx id, int angel);
#endif我使用的舵机信号端口是 GPIO 0, 功能就是普通的 GPIO口。
sg90.c 代码
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "hi_types_base.h"
#include "hi_errno.h"
#include "hi_io.h"
#include "hi_gpio.h"
#include "hi_time.h"
#include "sg90.h"
// sg90 舵机 端口 初始化
void SG90_Init(void)
{
hi_io_set_func(SG90_IO_NAME, SG90_IO_FUNC);
hi_gpio_set_dir(SG90_GPIO_ID, HI_GPIO_DIR_OUT);
hi_gpio_set_ouput_val(SG90_GPIO_ID, HI_GPIO_VALUE0);
}
// sg90 舵机 角度
void SG90_Angel(hi_gpio_idx id, int angel)
{
// hi_u16 t = 20000;
// hi_u16 t0 = 500;
// hi_u16 t180 = 2500;
// hi_u16 t1 = (hi_u16)((t180 - t0)/180 + 0.5); = 11.11111
// 高 低 时间
int high = (int)(500 + angel * 11.11 + 0.5);
int low = 20000 - high;
printf(" [SG90_Angel] high = %d , low = %d, 20ms = %d \n", high, low, (high+low));
// 输出
hi_gpio_set_ouput_val(id, HI_GPIO_VALUE1);
hi_udelay(high);
hi_gpio_set_ouput_val(id, HI_GPIO_VALUE0);
hi_udelay(low);
// 等待 转完
hi_udelay(100000);
}
先求出走1度所用的时间,结果是11.1111111..., 然后输入角度数 * 这个时间 ,就是运行所要的时间。
主函数 entry.c 代码
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "ohos_init.h"
#include "cmsis_os2.h"
#include "iot_gpio.h"
#include "hi_types_base.h"
#include "hi_errno.h"
#include "hi_io.h"
#include "hi_gpio.h"
#include "hi_time.h"
#include "hi_uart.h"
#include "sg90.h"
#include "uart.h"
#define TASK_SIZE 4096
#define TASK_PRIO 25
// 舵机 角度
int se_angel = 0;
// 舵机 状态
int se_state = 0;
// 整型 转 字符串
static char *Int_To_String(int num)
{
int int_length = sizeof(num);
char *result = (char *)malloc((int_length + 1) * sizeof(char));
if(result == NULL)
{
return NULL;
}
sprintf(result, "%d", num);
return result;
}
// 连接 字符串
static char *Connection_String(char *str1, char *str2)
{
size_t len1 = strlen(str1);
size_t len2 = strlen(str2);
char *result = (char *)malloc((len1 + len2 + 1) * sizeof(char));
if(result == NULL)
{
return NULL;
}
strcpy(result, str1);
strcpy(result + len1, str2);
return result;
}
// 串口 发送 舵机 角度
void Uart_Send_SE_Angel(void)
{
char *se_angel_str = Connection_String("se angel = ", Int_To_String(se_angel));
int str_size = strlen(se_angel_str);
printf(" [Uart_Send_SE_Angel] se_angel_str = %s , str_size = %d \n", se_angel_str, str_size);
Uart_Write_Data(se_angel_str, str_size);
}
static void *Uart_SG90_Task(const char *arg)
{
(void)arg;
printf(" [Uart SG90 test] Start \n");
// 关狗
hi_watchdog_disable();
// 端口初始化
hi_gpio_init();
// 舵机初始化
SG90_Init();
// 串口初始化
Uart_Init();
// 读取数据
char read_data[32] = {0};
// 返回值
int uart_ret = 0;
while(1)
{
// 读取串口
uart_ret = Uart_Read_Data(read_data, 32);
// 如果有数据
if(uart_ret > 0)
{
if(strlen(read_data) < 4)
{
char *re;
int angel_num = (int)(strtol(read_data, &re, 10));
printf(" [Array to integer] angel number = %d \n", angel_num);
if(angel_num >=0 && angel_num <= 180)
{
se_angel = angel_num;
se_state = 1;
printf(" [SE angle] angel = %d , state = %d \n", se_angel, se_state);
}
else
{
// 如果不符合继续循环
continue;
}
}
// 清空 数组
memset(read_data, 0, sizeof(read_data));
}
if(se_state == 1)
{
SG90_Angel(SG90_GPIO_ID, se_angel);
se_state = 0;
Uart_Send_SE_Angel();
}
hi_udelay(500000);
}
return NULL;
}
static void Uart_SG90_Entry(void)
{
osThreadAttr_t attr;
attr.name = "UartSG90Task";
attr.attr_bits = 0U;
attr.cb_mem = NULL;
attr.cb_size = 0U;
attr.stack_mem = NULL;
attr.stack_size = TASK_SIZE;
attr.priority = TASK_PRIO;
if (osThreadNew((osThreadFunc_t)Uart_SG90_Task, NULL, &attr) == NULL)
{
printf(" [Uart_SG90_Task] Falied! \n");
}
}
SYS_RUN(Uart_SG90_Entry);运行状态
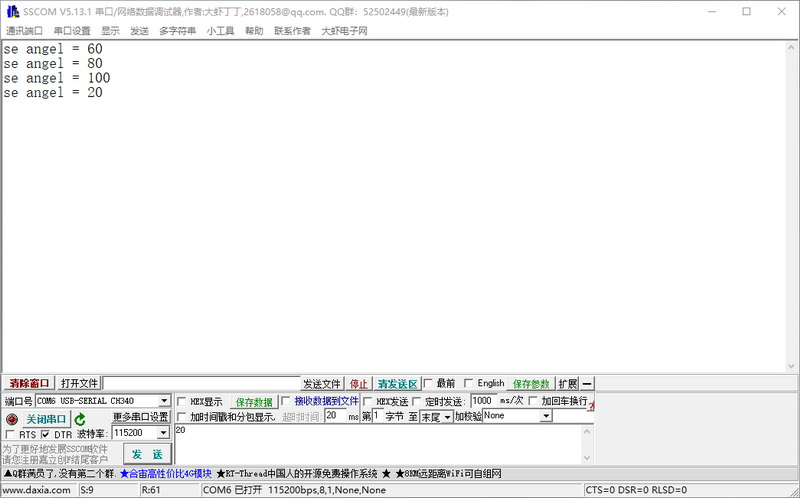
用串口通信工具连接控制舵机的串口,输入1个数值,点击发送,只要是0-180,单片机会控制舵机转到输入的角度,并把结果通过串口回传回来。
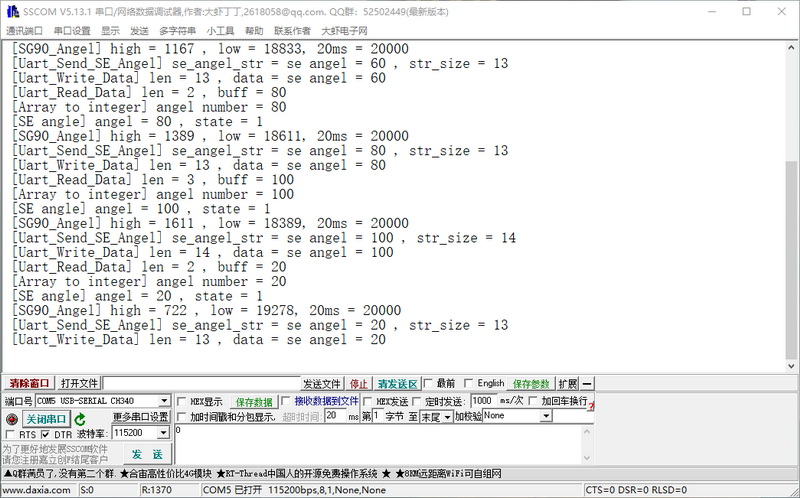
再开一个串口通信端,连接单片机通讯端口。
会打印单片机运行过程。
OK 结束。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 5
5 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)