蓝桥杯第十五届赛题满分代码(基于西风老师与柳离风老师模版)
蓝桥杯单片机第十五届省赛真题
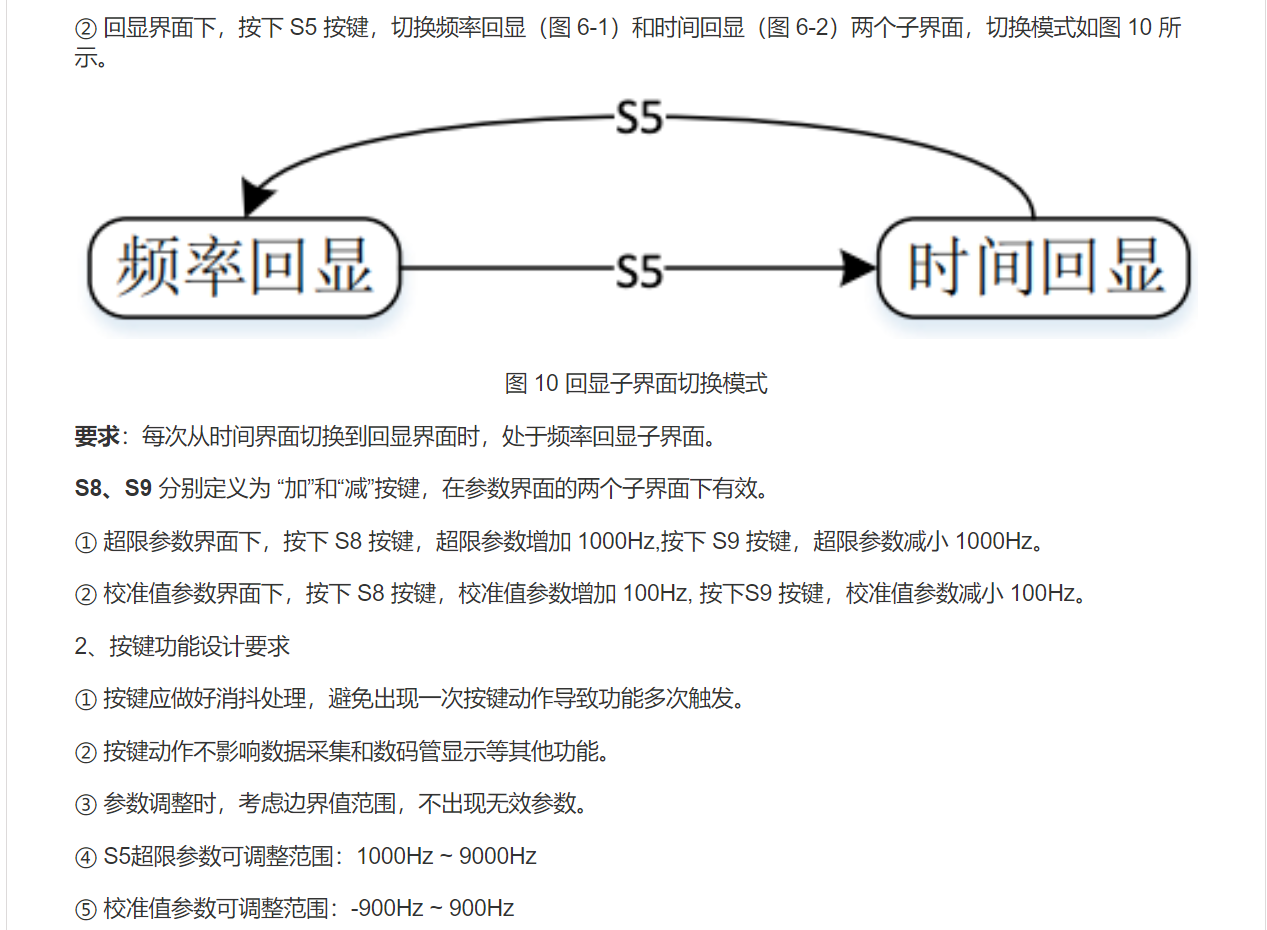
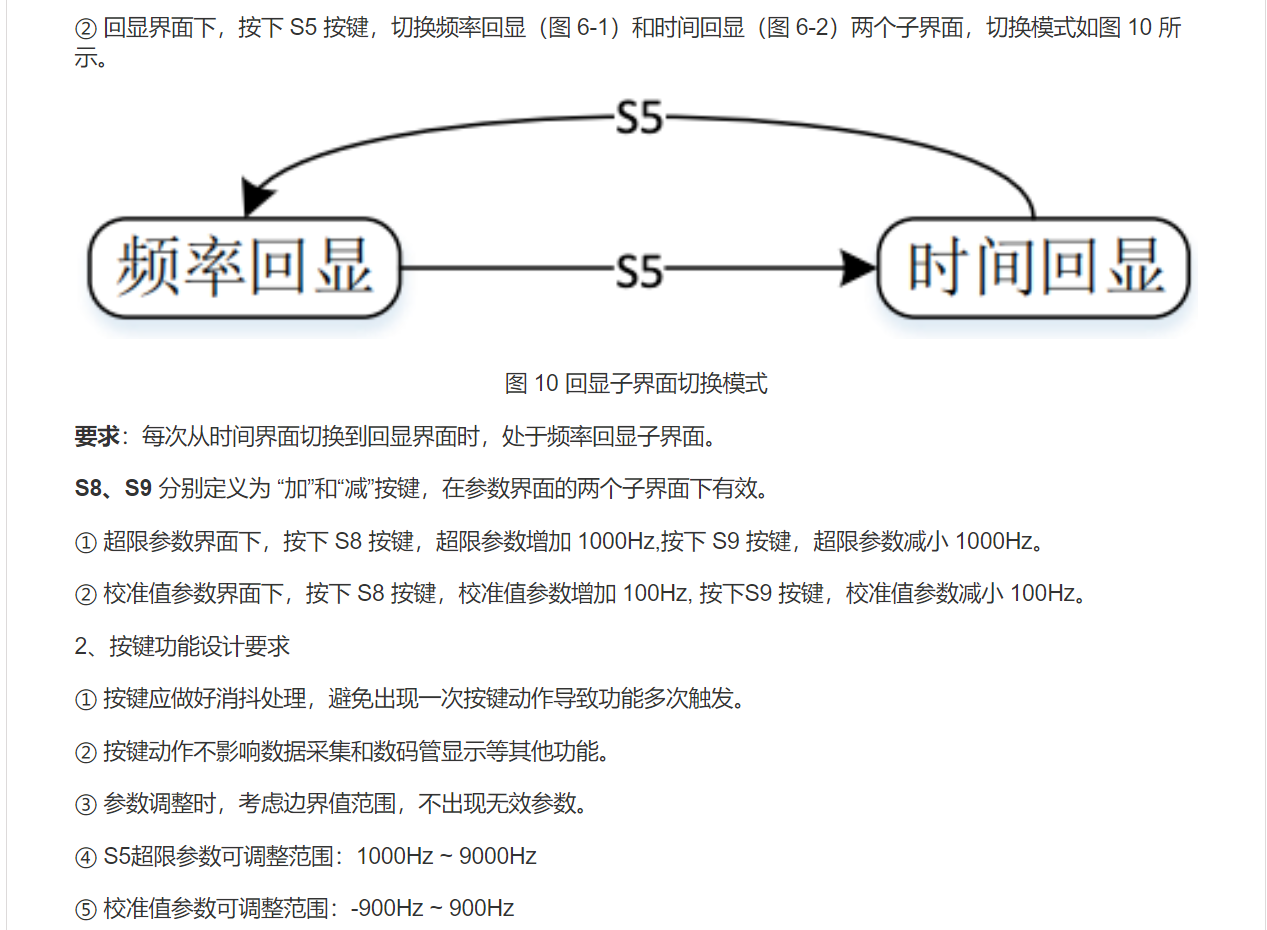
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
写的十五届赛题,供大家参考,还有不足的地方。
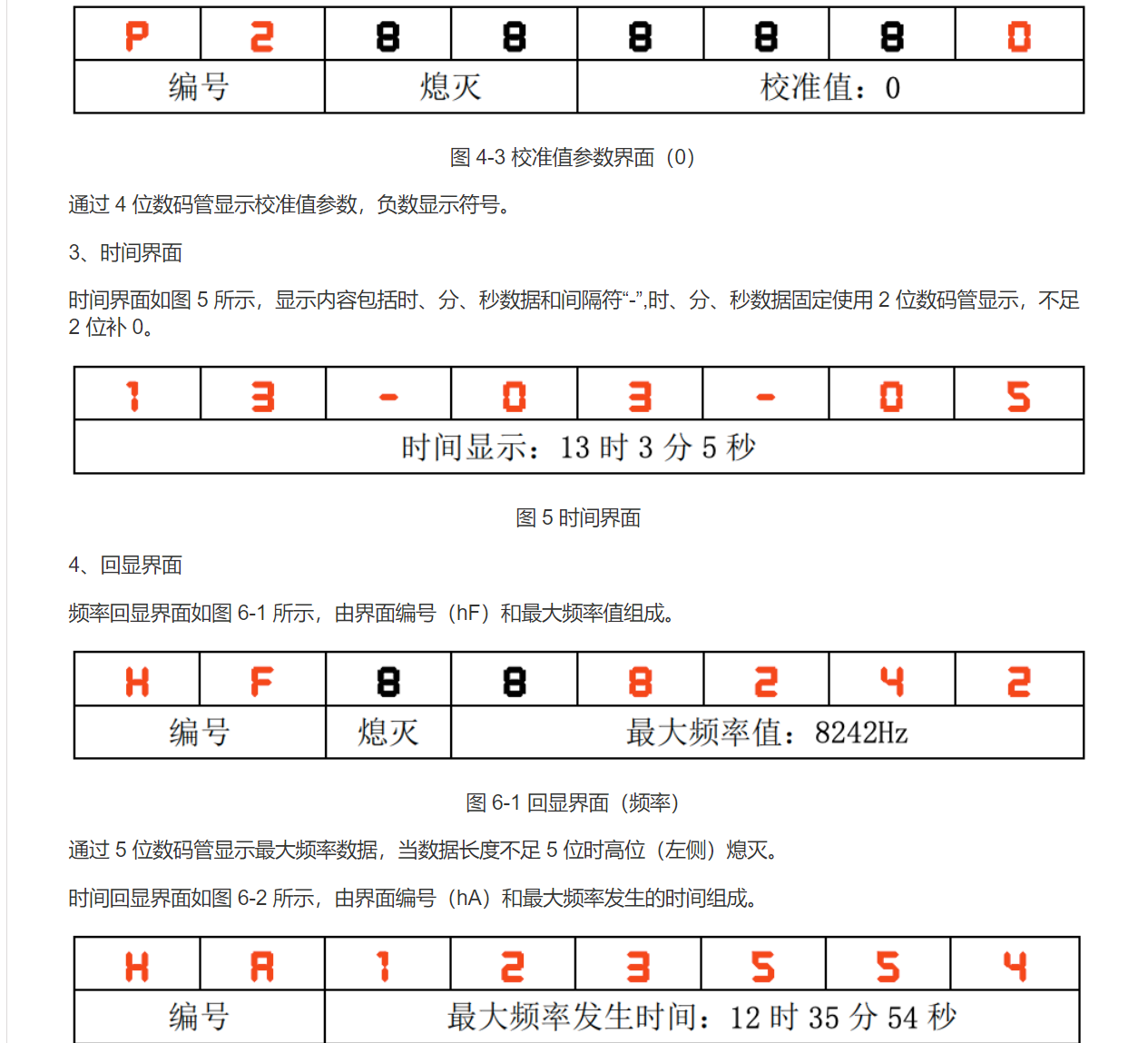
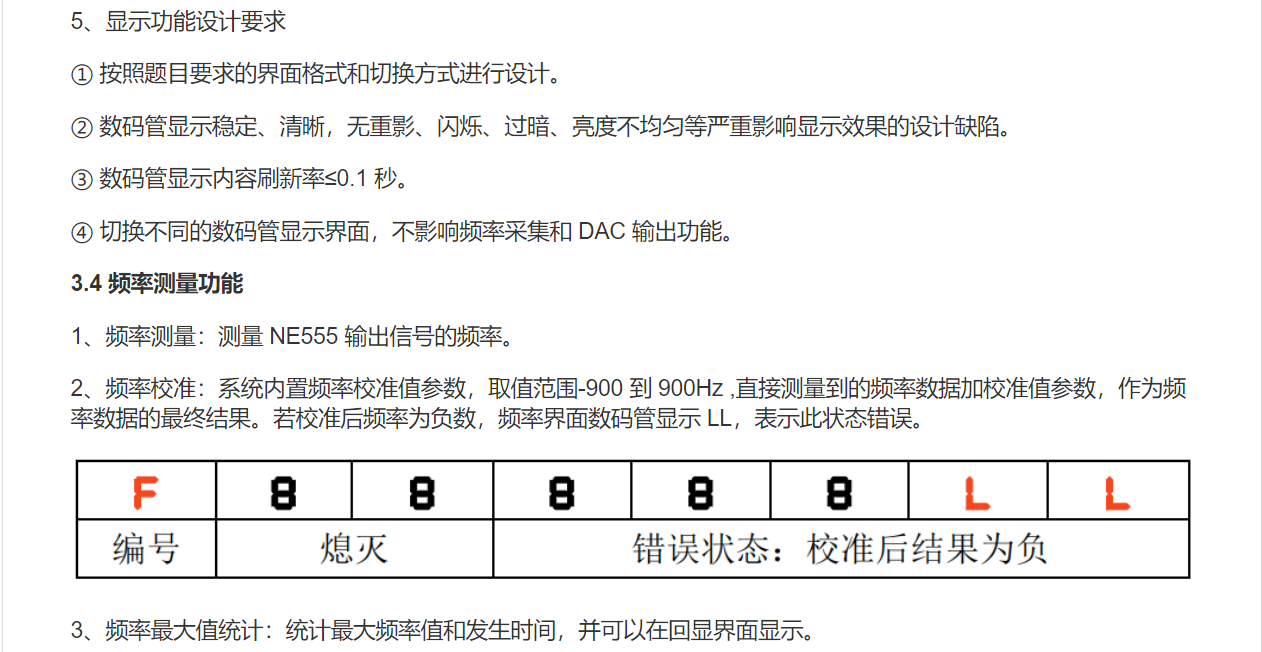
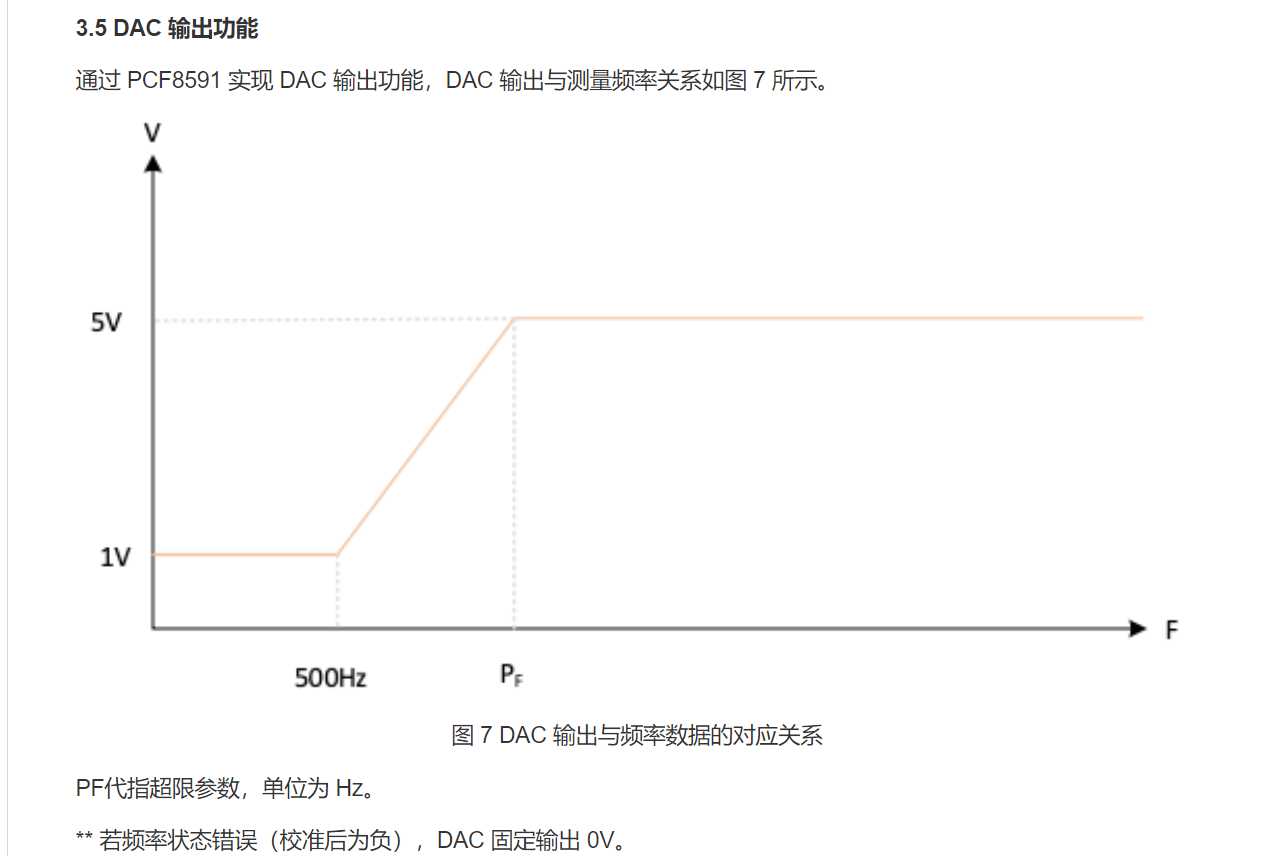
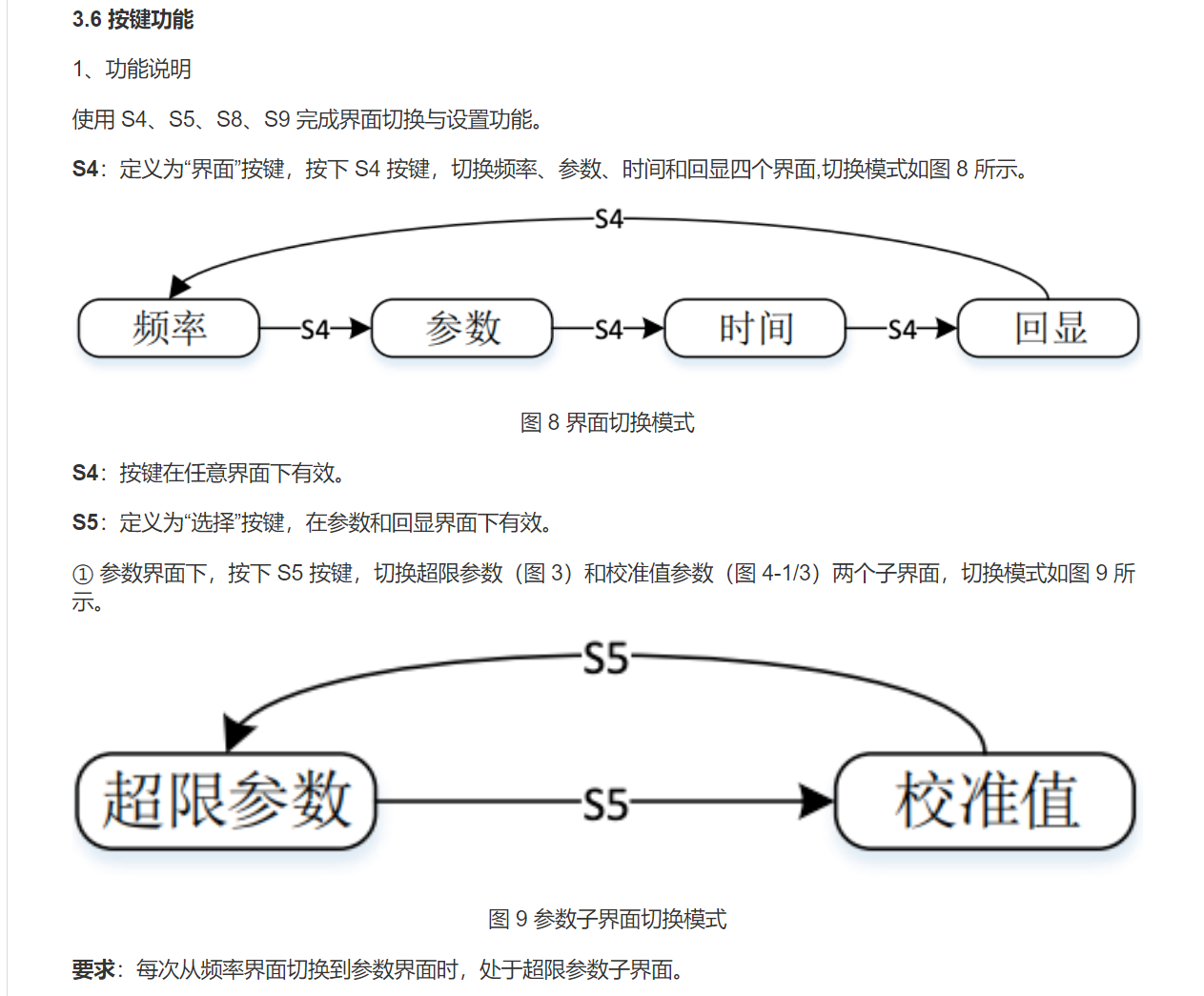
一、赛题题目

二、代码实现
一.main.c
#include "main.h"
uchar Key_Down,Key_up,Key_old,KeyNum;
uchar mode,Para_mode,Ecoh_mode;
int Para_PF=2000;
int jiaozhun=0;
uint fu_jiaozhun;
uchar ucRtc[3]={13,03,05};
float DAC;
void SMG_Desk()
{
if(SMG_Slow_Down<100)return;
SMG_Slow_Down=0;
DS1302_Read(ucRtc);
switch(mode)
{
case 0:
if(free>=0)
{
SMG[0]=15;
SMG[1]=16;
SMG[2]=16;
if(free_flag==1)
{
SMG[3]=(free<10000)?16:free/10000;
SMG[4]=(free<1000)?16:free/1000%10;
SMG[5]=(free<100)?16:free/100%10;
SMG[6]=(free<10)?16:free/10%10;
SMG[7]=free%10;
free_flag=0;
}
}
else
{
SMG[0]=15;
SMG[1]=16;
SMG[2]=16;
SMG[3]=16;
SMG[4]=16;
SMG[5]=16;
SMG[6]=20;
SMG[7]=20;//LL
}
break;
case 1:
switch(Para_mode)
{
case 0:
SMG[0]=17;
SMG[1]=1;
SMG[2]=16;
SMG[3]=16;
SMG[4]=Para_PF/1000;
SMG[5]=Para_PF/100%10;
SMG[6]=Para_PF/10%10;
SMG[7]=Para_PF%10;
break;
case 1:
if(jiaozhun>=0)
{
SMG[0]=17;
SMG[1]=2;
SMG[2]=16;
SMG[3]=16;
SMG[4]=16;
SMG[5]=(jiaozhun<100)?16:jiaozhun/100%10;
SMG[6]=(jiaozhun<10)?16:jiaozhun/10%10;
SMG[7]=jiaozhun%10;
}
else
{
fu_jiaozhun=-jiaozhun;
SMG[0]=17;
SMG[1]=2;
SMG[2]=16;
SMG[3]=16;
SMG[4]=18;
SMG[5]=(fu_jiaozhun<100)?16:fu_jiaozhun/100%10;
SMG[6]=(fu_jiaozhun<10)?16:fu_jiaozhun/10%10;
SMG[7]=fu_jiaozhun%10;
}
break;
}
break;
case 2:
SMG[0]=ucRtc[0]/10;
SMG[1]=ucRtc[0]%10;
SMG[2]=SMG[5]=18;
SMG[3]=ucRtc[1]/10;
SMG[4]=ucRtc[1]%10;
SMG[6]=ucRtc[2]/10;
SMG[7]=ucRtc[2]%10;
break;
case 3:
switch(Ecoh_mode)
{
case 0:
SMG[0]=19;
SMG[1]=15;
SMG[2]=16;
SMG[3]=(MAX_Free<10000)?16:MAX_Free/10000;
SMG[4]=(MAX_Free<1000)?16:MAX_Free/1000%10;
SMG[5]=(MAX_Free<100)?16:MAX_Free/100%10;
SMG[6]=(MAX_Free<10)?16:MAX_Free/10%10;
SMG[7]=MAX_Free%10;
break;
case 1:
if(free_flag)
{
SMG[0]=19;
SMG[1]=10;
SMG[2]=Ecoh_time[0]/10;
SMG[3]=Ecoh_time[0]%10;
SMG[4]=Ecoh_time[1]/10;
SMG[5]=Ecoh_time[1]%10;
SMG[6]=Ecoh_time[2]/10;
SMG[7]=Ecoh_time[2]%10;
}
break;
}
break;
}
}
void KEY_Desk()
{
if(KEY_Slow_Down<10)return;
KEY_Slow_Down=0;
KeyNum=Key();
Key_Down=KeyNum&(KeyNum^Key_old);
Key_up=~KeyNum&(KeyNum^Key_old);
Key_old=KeyNum;
if(Key_Down==4)
{
if(++mode==4)mode=0;
Para_mode=0;
Ecoh_mode=0;
}
if(Key_Down==5)
{
if(mode==1)
{
Para_mode^=1;
}
if(mode==3)
{
Ecoh_mode^=1;
}
}
if(Key_Down==8)
{
if(mode==1&&Para_mode==0)
{
Para_PF=(Para_PF>=9000)?9000:Para_PF+1000;
}
if(mode==1&&Para_mode==1)
{
jiaozhun=(jiaozhun>=900)?900:jiaozhun+100;
}
}
if(Key_Down==9)
{
if(mode==1&&Para_mode==0)
{
Para_PF=(Para_PF<=1000)?1000:Para_PF-1000;
}
if(mode==1&&Para_mode==1)
{
jiaozhun=(jiaozhun<=-900)?-900:jiaozhun-100;
}
}
}
void UZ_Desk()
{
if(UZ_Slow_Down<100)return;
UZ_Slow_Down=0;
if(free_flag_dat==1)
DA_Write(0);
if(free>=0&&free<=500)
DA_Write(51);
if(free>Para_PF)
DA_Write(255);
if(free>500&&free<=Para_PF)
DA_Write(((4.0*(free-500.0))/(Para_PF-500)+1.0)*51);
}
/*主函数*/
void main()
{
SYS_Desk();
Timer1_Init();
Timer0_Init();
DS1302_Write(ucRtc);
while(1)
{
SMG_Desk();
KEY_Desk();
UZ_Desk();
}
}
//
一.main.h
#ifndef __MAIN_H__
#define __MAIN_H__
#include <STC15F2K60S2.H>
#define uchar unsigned char
#define uint unsigned int
#include "sys.h"
#include "timer.h"
#include "key.h"
#include "ds1302.h"
#include "iic.h"
extern uchar mode,Para_mode,Ecoh_mode;
extern int Para_PF;
#endif
//
二.sys.c
#include "sys.h"
code unsigned char Seg_Table[] =
{
0xc0, //0
0xf9, //1
0xa4, //2
0xb0, //3
0x99, //4
0x92, //5
0x82, //6
0xf8, //7
0x80, //8
0x90, //9
0x88, //A
0x83, //b
0xc6, //C
0xa1, //d
0x86, //E
0x8e, //F
0xff, //Ãð 16
0x8c, //P 17
0xbf, //- 18
0x89, //H 19
0xc7, //L 20
};
void hc573(uchar chane)
{
switch(chane)
{
case 4:P2=P2&0x1f|0x80;break;
case 5:P2=P2&0x1f|0xa0;break;
case 6:P2=P2&0x1f|0xc0;break;
case 7:P2=P2&0x1f|0xe0;break;
}
P2=P2&0x1f;
}
void SYS_Desk()
{
P0=0x00;
hc573(5);
P0=0xff;
hc573(4);
}
void led(uchar *LED,uchar pos)
{
static uchar temp=0xff;
if(LED[pos])
temp&=~(0x01<<pos);
else
temp|=0x01<<pos;
P0=temp;
hc573(4);
}
void smg(uchar *temp,uchar *dot,uchar pos)
{
P0=0xff;
hc573(7);
P0=0x01<<pos;
hc573(6);
if(dot[pos])
P0=Seg_Table[temp[pos]] & 0x7f;
else
P0=Seg_Table[temp[pos]];
hc573(7);
}
//
二.sys.h
#ifndef __SYS_H__
#define __SYS_H__
#include <STC15F2K60S2.H>
#define uchar unsigned char
#define uint unsigned int
void hc573(uchar chane);
void SYS_Desk();
void led(uchar *LED,uchar pos);
void smg(uchar *temp,uchar *dot,uchar pos);
#endif
//
三.timer.c
#include "timer.h"
#include "main.h"
#include "sys.h"
uchar SMG[]={16,16,16,16,16,16,16,16};
uchar LED[]={0,0,0,0,0,0,0,0};
uchar dot[]={0,0,0,0,0,0,0,0};
uchar pos;
uchar SMG_Slow_Down;//减速函数
uchar KEY_Slow_Down;
uchar UZ_Slow_Down;
/*数据变量*/
uint freetime;
int free;
int MAX_Free;
bit free_flag=0;
int free_old;
uchar Ecoh_time[3];
uchar time200ms;
uchar time200ms1;
bit free_flag_dat;
//
void Timer1_Init(void) //1毫秒@12.000MHZ
{
AUXR &= 0xBF;
TMOD &= 0x0F;
TL1 = 0x18;
TH1 = 0xFC;
TF1 = 0;
TR1 = 1;
ET1=1;
EA=1;
}
void Timer0_Init(void) //1毫秒@12.000MHZ
{
AUXR &= 0x7F;
TMOD &= 0xF0;
TMOD |=0x05;
TL0 = 0x00;
TH0 = 0x00;
TF0 = 0;
TR0 = 1;
}
void timer1() interrupt 3
{
if(++freetime==1000)
{
free_flag=1;
freetime=0;
free=((TH0<<8)|TL0)+jiaozhun;
TL0=0;
TH0=0;
}
//
if(free_flag)
{
if(free_old<free)
{
MAX_Free=free;
free_old=free;
DS1302_Read(Ecoh_time);
}
}
//
if(mode==0)
{
if(++time200ms==200)
{
time200ms=0;
LED[0]=~LED[0];
}
}
else
{
LED[0]=0;
}
//
if(free>Para_PF)
{
if(++time200ms1==200)
{
time200ms1=0;
LED[1]=~LED[1];
}
}
else if(free>=0&&free<Para_PF)
{
LED[1]=0;
}
else if(free<0)
{
LED[1]=1;
}
//
if(free<=0)
{
free_flag_dat=1;
}
else
{
free_flag_dat=0;
}
SMG_Slow_Down++;
KEY_Slow_Down++;
UZ_Slow_Down++;
smg(SMG,dot,pos);
led(LED,pos);
if(++pos==8)pos=0;
}
//
三.timer.h
#ifndef __TIMER_H__
#define __TIMER_H__
#include <STC15F2K60S2.H>
#define uchar unsigned char
#define uint unsigned int
void Timer1_Init(void);
void Timer0_Init(void);
extern uchar SMG[];
extern uchar LED[];
extern uchar dot[];
extern uchar pos;
extern uchar SMG_Slow_Down;
extern uchar KEY_Slow_Down;
extern uchar UZ_Slow_Down;
extern uint freetime;
extern int free;
extern int MAX_Free;
extern int free_old;
extern bit free_flag;
extern uchar Ecoh_time[3];
extern int jiaozhun;
extern uchar time200ms;
extern uchar time200ms1;
extern bit free_flag_dat;
#endif
//
四.key.c
#include "key.h"
uchar Key()
{
uchar temp=0;
P44=0;P42=1;P35=1;
if(P33==0)temp=4;
if(P32==0)temp=5;
if(P31==0)temp=6;
if(P30==0)temp=7;
P44=1;P42=0;P35=1;
if(P33==0)temp=8;
if(P32==0)temp=9;
if(P31==0)temp=10;
if(P30==0)temp=11;
P44=1;P42=1;P35=0;
if(P33==0)temp=12;
if(P32==0)temp=13;
if(P31==0)temp=14;
if(P30==0)temp=15;
P44=1;P42=1;P35=1;
//P34=0;
if(P33==0)temp=16;
if(P32==0)temp=17;
if(P31==0)temp=18;
if(P30==0)temp=19;
return temp;
}
//
四.key.h
#ifndef __KEY_H__
#define __KEY_H__
#include <STC15F2K60S2.H>
#define uchar unsigned char
#define uint unsigned int
uchar Key();
#endif
//
五.ds1302.c
//官方底层代码
#include "ds1302.h"
#include "intrins.h"
sbit SDA=P2^3;
sbit SCK=P1^7;
sbit RST=P1^3;
//
void Write_Ds1302(unsigned char temp)
{
unsigned char i;
for (i=0;i<8;i++)
{
SCK = 0;
SDA = temp&0x01;
temp>>=1;
SCK=1;
}
}
//
void Write_Ds1302_Byte( unsigned char address,unsigned char dat )
{
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
Write_Ds1302(dat);
RST=0;
}
//
unsigned char Read_Ds1302_Byte ( unsigned char address )
{
unsigned char i,temp=0x00;
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
for (i=0;i<8;i++)
{
SCK=0;
temp>>=1;
if(SDA)
temp|=0x80;
SCK=1;
}
RST=0; _nop_();
SCK=0; _nop_();
SCK=1; _nop_();
SDA=0; _nop_();
SDA=1; _nop_();
return (temp);
}
void DS1302_Write(uchar *ucRtc)
{
uchar i;
Write_Ds1302_Byte(0x8e,0x00);//关闭写保护
for(i=0;i<3;i++)
{
Write_Ds1302_Byte(0x84-2*i,ucRtc[i]/10%10<<4|ucRtc[i]%10);
}
Write_Ds1302_Byte(0x8e,0x80);//打开
}
void DS1302_Read(uchar *ucRtc)
{
uchar i;
for(i=0;i<3;i++)
{
ucRtc[i]=Read_Ds1302_Byte(0x85-2*i);
ucRtc[i]=((ucRtc[i]/16)*10)+(ucRtc[i]%16);
}
}
//
五.ds1302.h
#ifndef __DS1302_H__
#define __DS1302_H__
#include <STC15F2K60S2.H>
#define uchar unsigned char
#define uint unsigned int
void DS1302_Write(uchar *ucRtc);
void DS1302_Read(uchar *ucRtc);
#endif
//
六.iic.c
//官方底层代码
#include "iic.h"
#include "intrins.h"
sbit scl=P2^0;
sbit sda=P2^1;
#define DELAY_TIME 10
//
static void I2C_Delay(unsigned char n)
{
do
{
_nop_();_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();_nop_();
}
while(n--);
}
//
void I2CStart(void)
{
sda = 1;
scl = 1;
I2C_Delay(DELAY_TIME);
sda = 0;
I2C_Delay(DELAY_TIME);
scl = 0;
}
//
void I2CStop(void)
{
sda = 0;
scl = 1;
I2C_Delay(DELAY_TIME);
sda = 1;
I2C_Delay(DELAY_TIME);
}
//
void I2CSendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++){
scl = 0;
I2C_Delay(DELAY_TIME);
if(byt & 0x80){
sda = 1;
}
else{
sda = 0;
}
I2C_Delay(DELAY_TIME);
scl = 1;
byt <<= 1;
I2C_Delay(DELAY_TIME);
}
scl = 0;
}
//
unsigned char I2CReceiveByte(void)
{
unsigned char da;
unsigned char i;
for(i=0;i<8;i++){
scl = 1;
I2C_Delay(DELAY_TIME);
da <<= 1;
if(sda)
da |= 0x01;
scl = 0;
I2C_Delay(DELAY_TIME);
}
return da;
}
//
unsigned char I2CWaitAck(void)
{
unsigned char ackbit;
scl = 1;
I2C_Delay(DELAY_TIME);
ackbit = sda;
scl = 0;
I2C_Delay(DELAY_TIME);
return ackbit;
}
//
void I2CSendAck(unsigned char ackbit)
{
scl = 0;
sda = ackbit;
I2C_Delay(DELAY_TIME);
scl = 1;
I2C_Delay(DELAY_TIME);
scl = 0;
sda = 1;
I2C_Delay(DELAY_TIME);
}
void DA_Write(uchar addr)
{
I2CStart();
I2CSendByte(0x90);
I2CWaitAck();
I2CSendByte(0x41);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CStop();
}
//
六.iic.h
#ifndef __IIC_H__
#define __IIC_H__
#include <STC15F2K60S2.H>
#define uchar unsigned char
#define uint unsigned int
void DA_Write(uchar addr);
#endif
//如有侵权请联系私信。
总结
总体来说难度还是可以的,主要注意题目细节上的问题。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 29
29 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)