永磁同步电机控制算法--零d轴电流IF控制
传统的开环I-f控制阻尼较差,只能在正d轴电流下稳定运行。采用了一种具有新电流补偿回路的I-f控制,以实现稳定的id=0操作。由于在切换到FOC之前已经实现了id=0操作,因此所提出的方法可用于无缝过渡到无传感器磁场定向控制(FOC)的启动。
·
一、原理介绍
传统的开环I-f控制阻尼较差,只能在正d轴电流下稳定运行。采用了一种具有新电流补偿回路的I-f控制,以实现稳定的id=0操作。由于在切换到FOC之前已经实现了id=0操作,因此所提出的方法可用于无缝过渡到无传感器磁场定向控制(FOC)的启动。
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
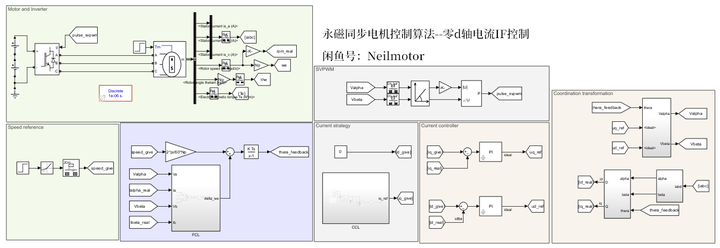
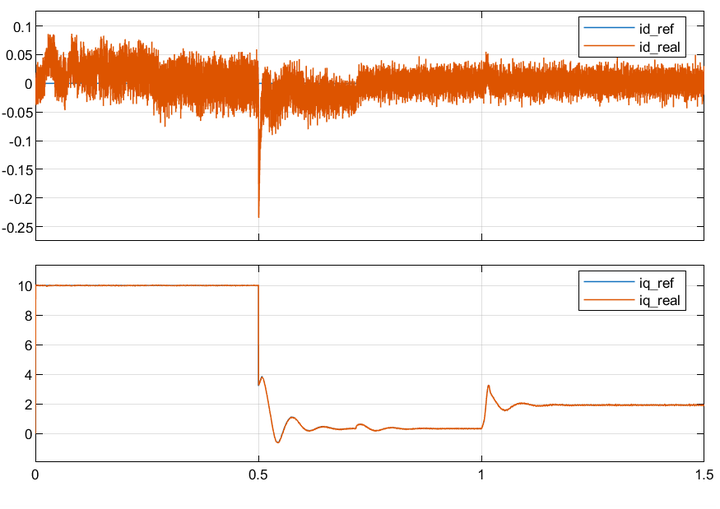
仿真工况:电机空载零速启动,给定转速为斜坡信号,0.25s到达给定转速500rpm,0.5s启动CCL,1s施加阶跃负载
2.1转速
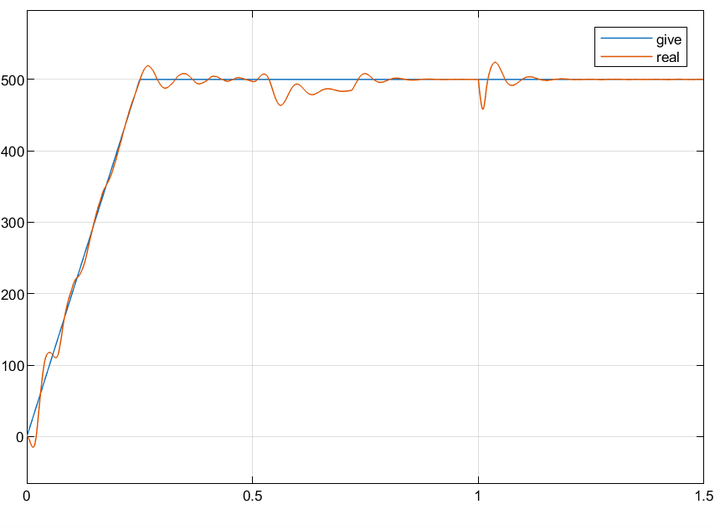
0.5s后启动CCL,开始调整dq轴电流的分配,实现id=0,在这个过程中导致转速略微下降。电流调整完毕后,转速准确跟踪给定值。
2.2dq轴电流
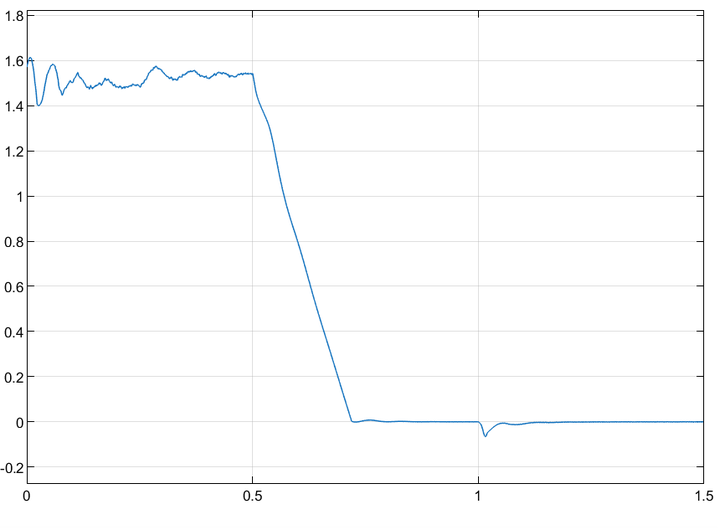
2.3虚拟坐标系与实际坐标系转角误差
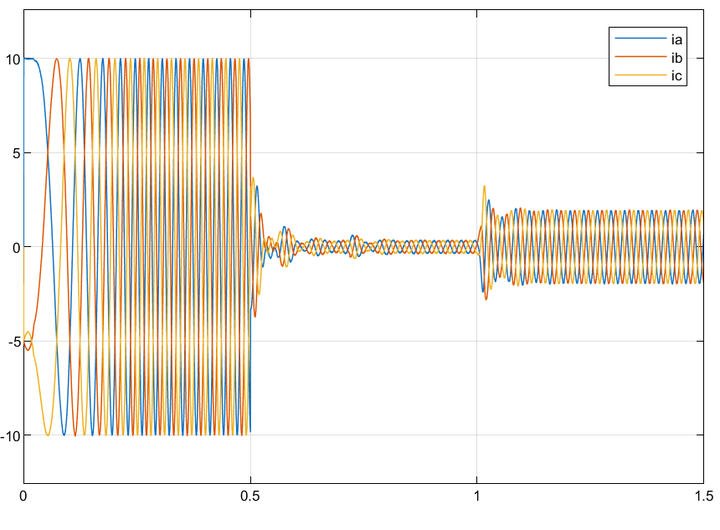
2.4三相电流
SPMSM驱动器的传统开环I-f控制阻尼较差,仅在正d轴电流下稳定。FCL可以提供额外的阻尼,但它不提供id=0操作。采用了一种具有FCL和新CCL的I-f控制,用于稳定SPMSM的id=0控制,所提出的I-f控制可以用作一种启动方案,与基于电流减少的现有过渡方法相比,可以平滑、更稳定地过渡到FOC。
PS:最后一个IF控制算法研究

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 4
4 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)