台达伺服电机B3位置模式PR控制
本文通过上位机软件进行台达电机的简单位置指令控制。
拥有台达B3电机和驱动器,如何借助ASDA-soft快速实现电机的简单位置指令控制?
前言
本文适用于通过上位机软件进行台达电机的简单位置指令控制。
电机软件安装、软件使用说明、电机使用说明资料↓
网盘链接:https://pan.baidu.com/s/1QbjBzWVdHPmHCtYvGmeuHA?pwd=maa9 提取码: maa9
一、准备工作
1.软件下载
在官网下载中心 - 台达官网下载ASDA-soft,或者网盘里也有
这里下载的V7.0.2.0版本,注意暂不支持win11系统
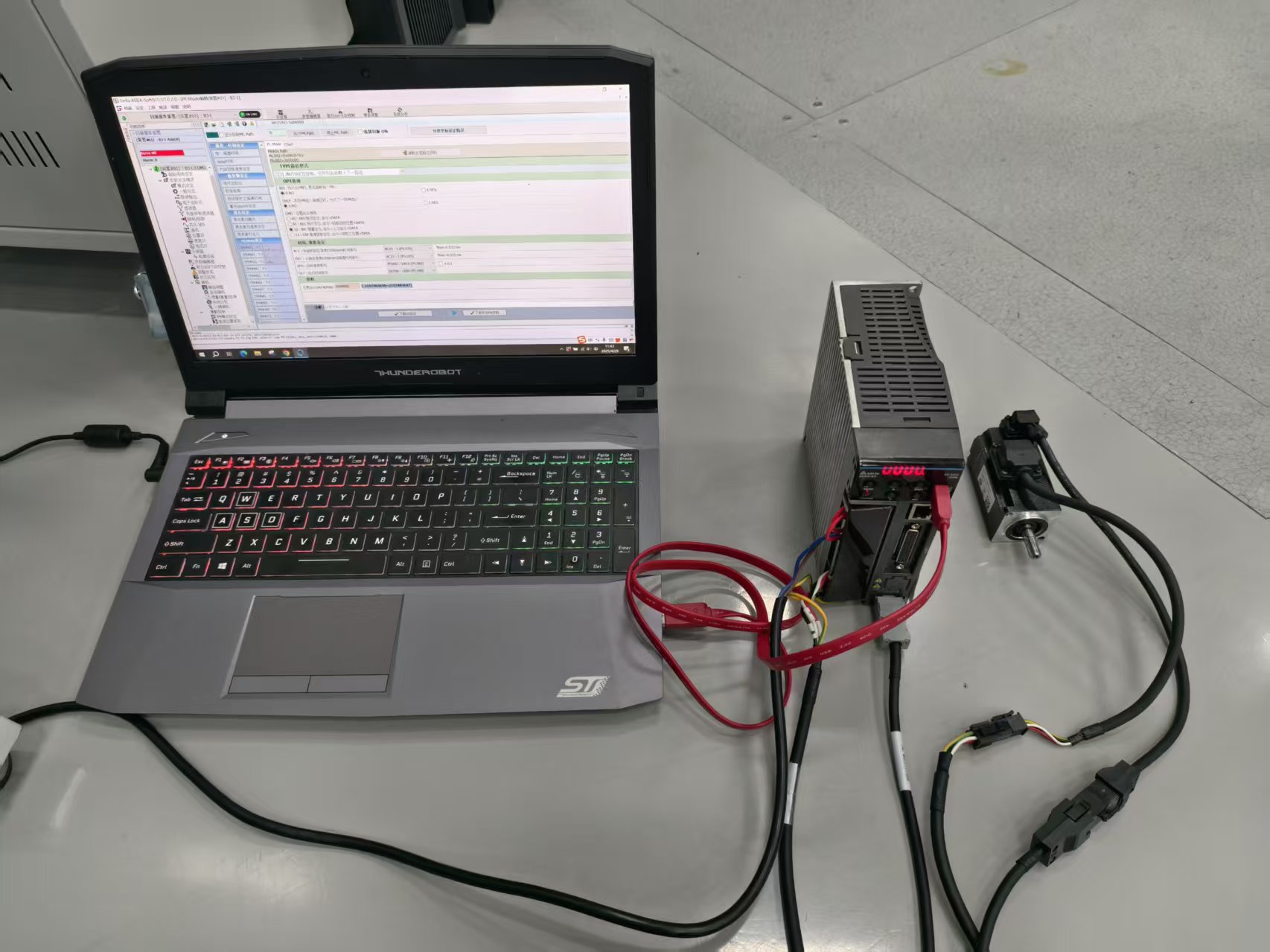
2.硬件连接
台达B3电机、驱动器、连接电脑和驱动器CN2接口的通信线
电机和驱动器之间的编码线和控制线也接好
3.软件和驱动安装
一路next安装好ASDA-soft软件,连接好通信线的情况下会直接检测驱动,都安装好。
二、基础设置
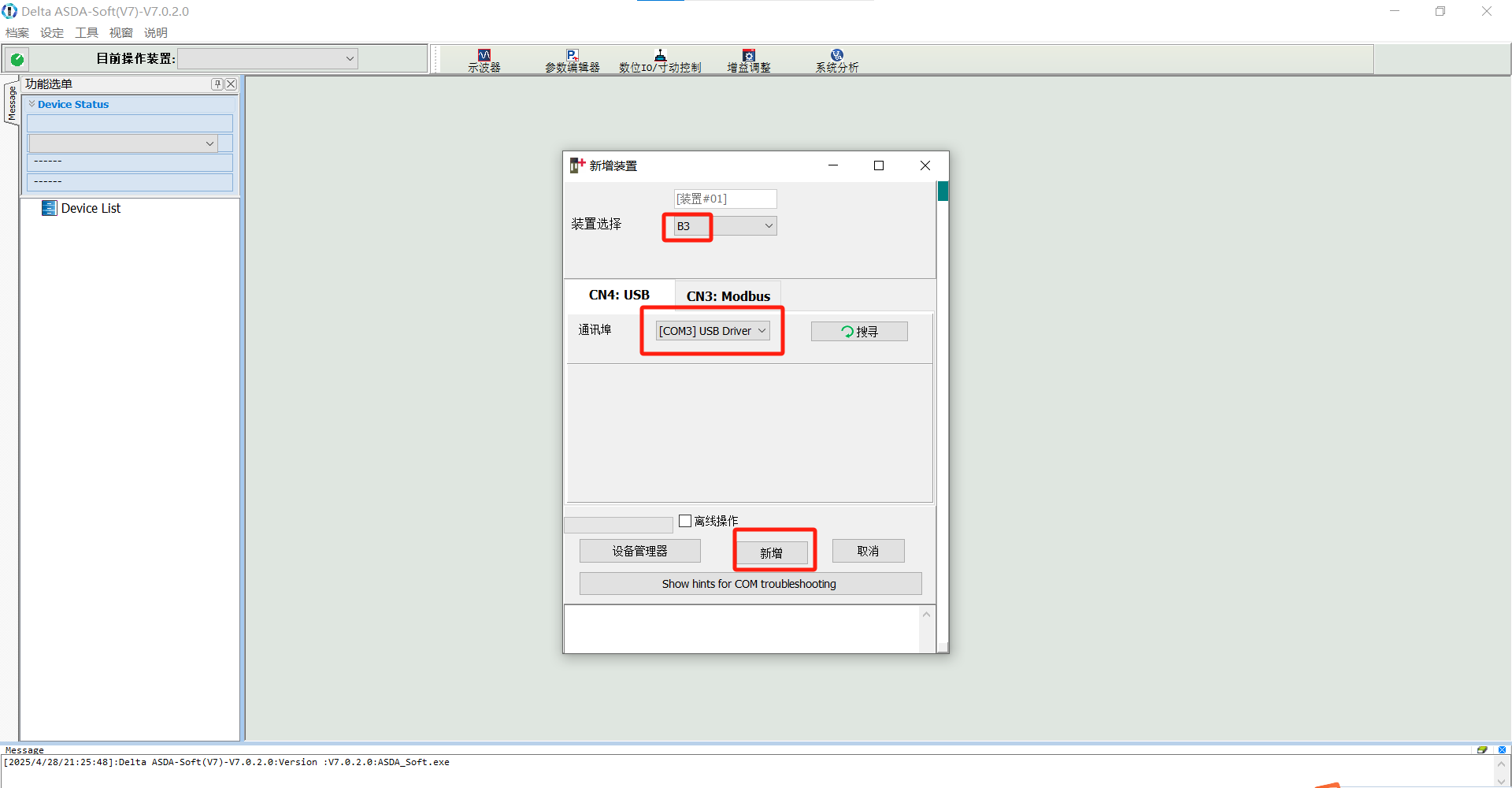
1.通信连接
前面都安装好后,打开软件可以检测到串口。点击:装置-串口--新增--载入全部参数。
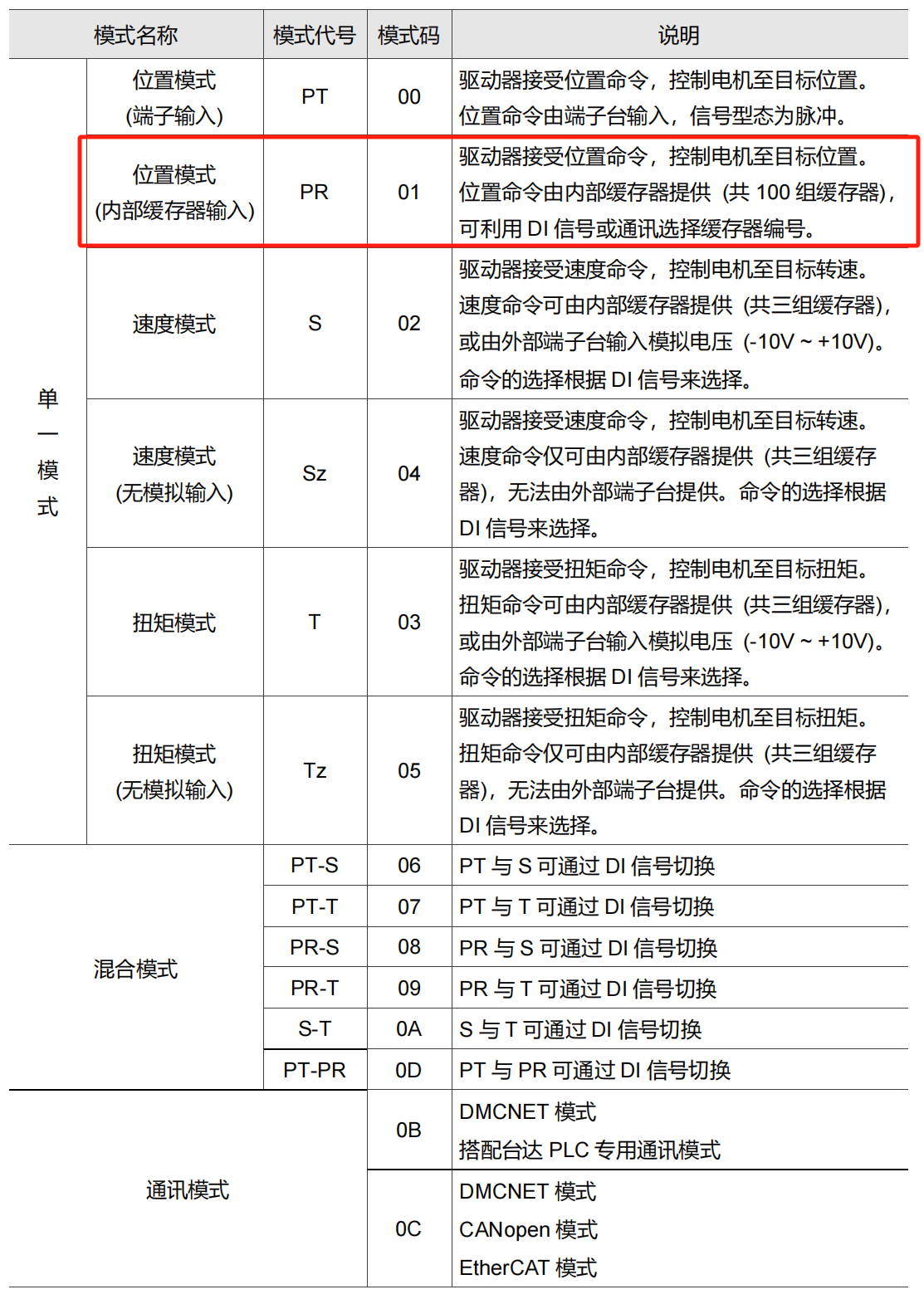
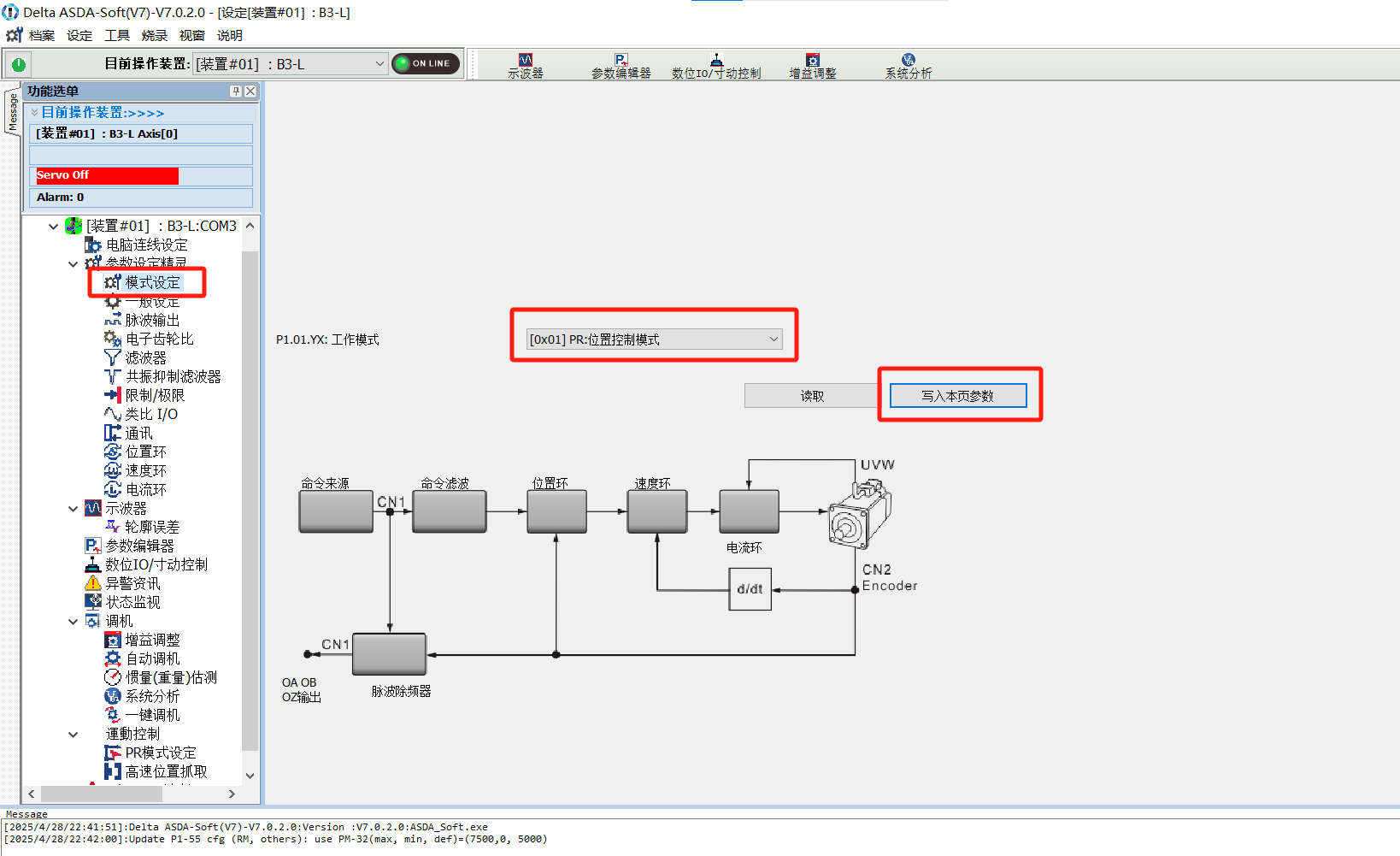
2.模式设置
根据B3电机说明书,有多种模式可以选择,这里采用PR模式,可以直接通过ASDA-soft软件把位置、转速、延时等参数(后面详细介绍)写入内部缓存器,操作非常方便。
模式设定--PR位置控制模式--写入本页参数--驱动器重新上电
三、PR路径设置(实例详解)
这里,通过一个实例来展示:
电机以100rpm的速度正转3圈,静止1s,然后以100rpm的速度反转3圈,静止1s,循环上述过程
可以拆分成3段路径:
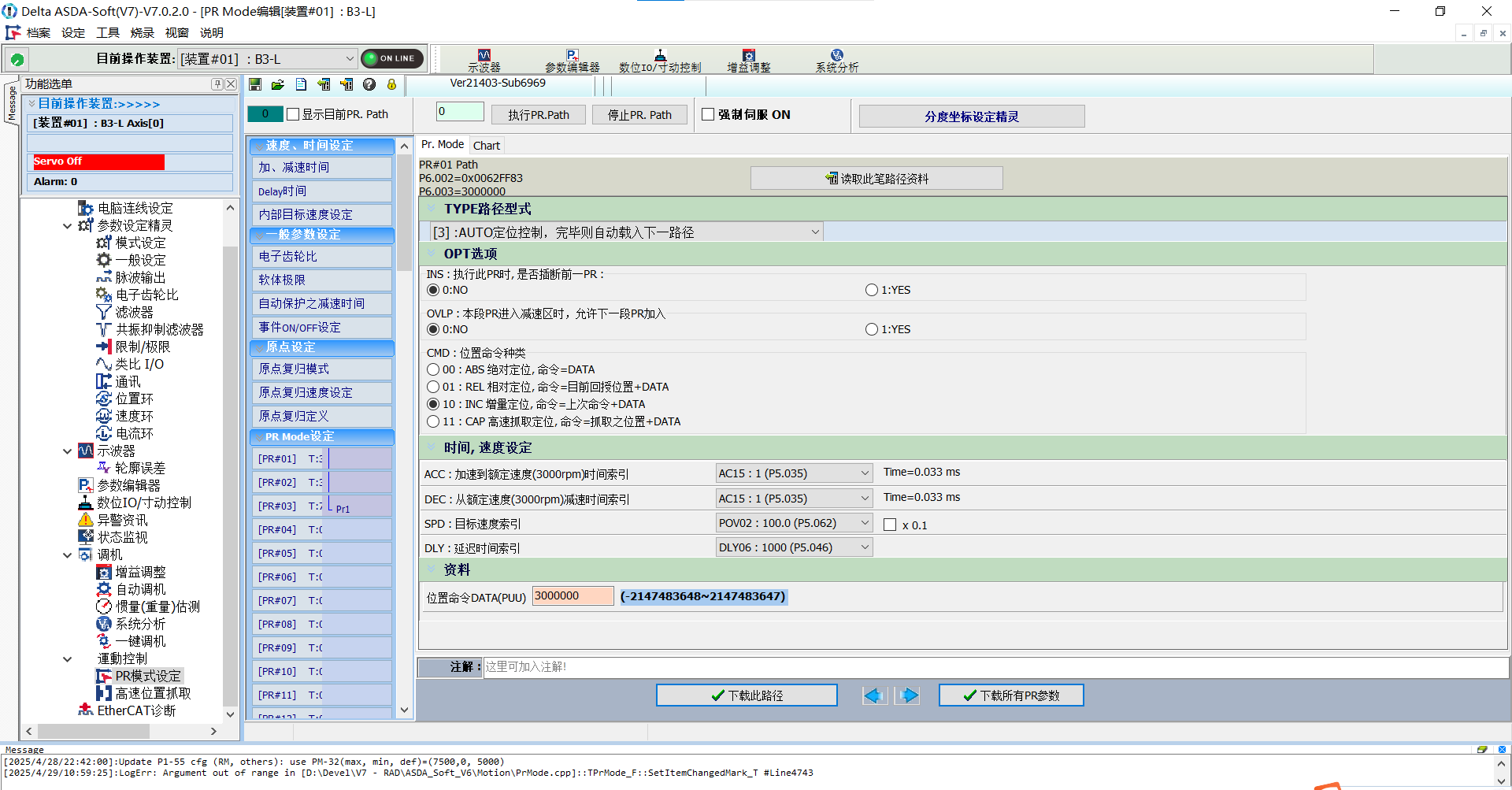
PR#01:速度设定:100rpm,位置命令:3圈,延时:1s;
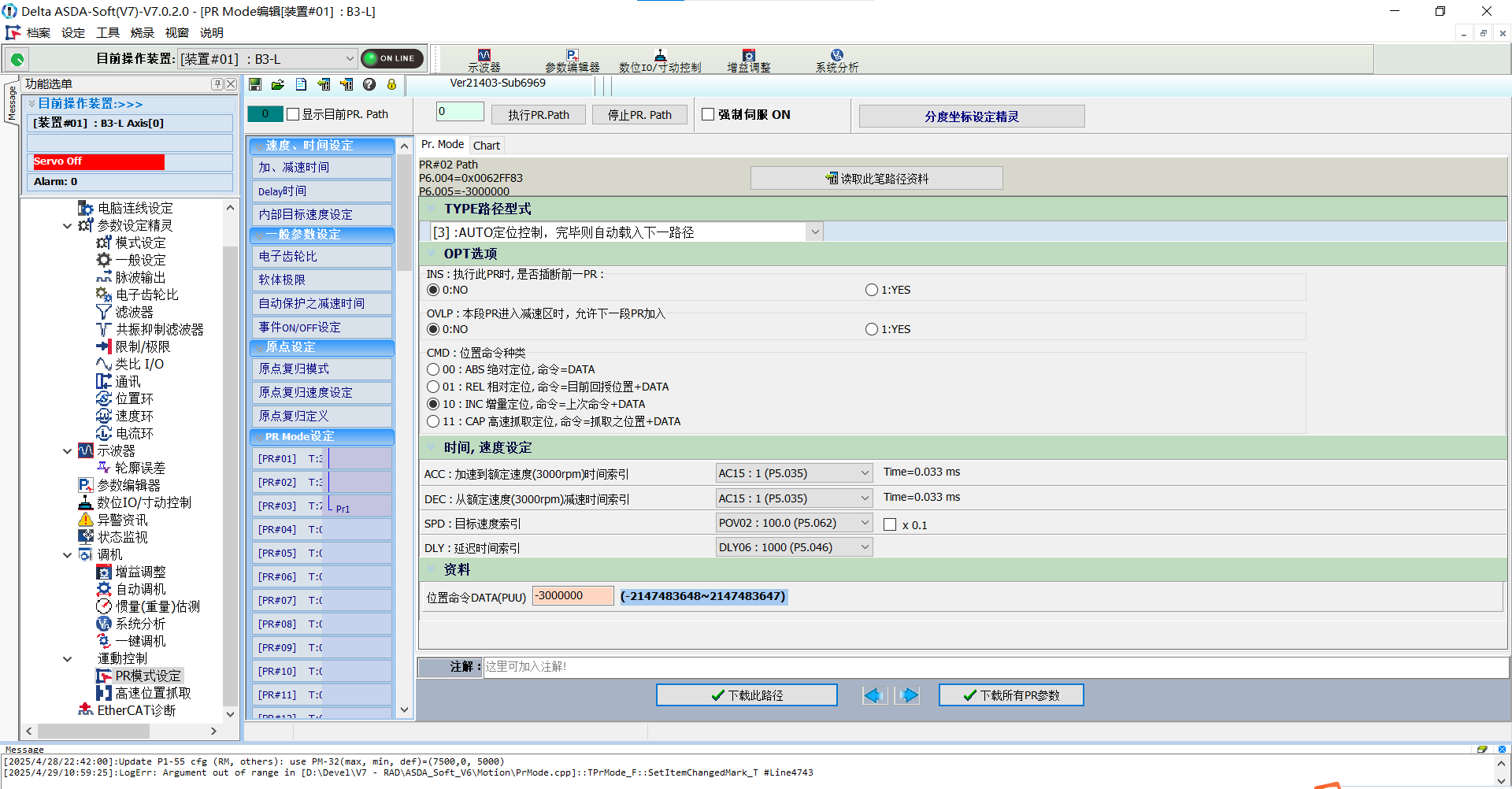
PR#02:速度设定:100rpm,位置命令:-3圈,延时:1s;
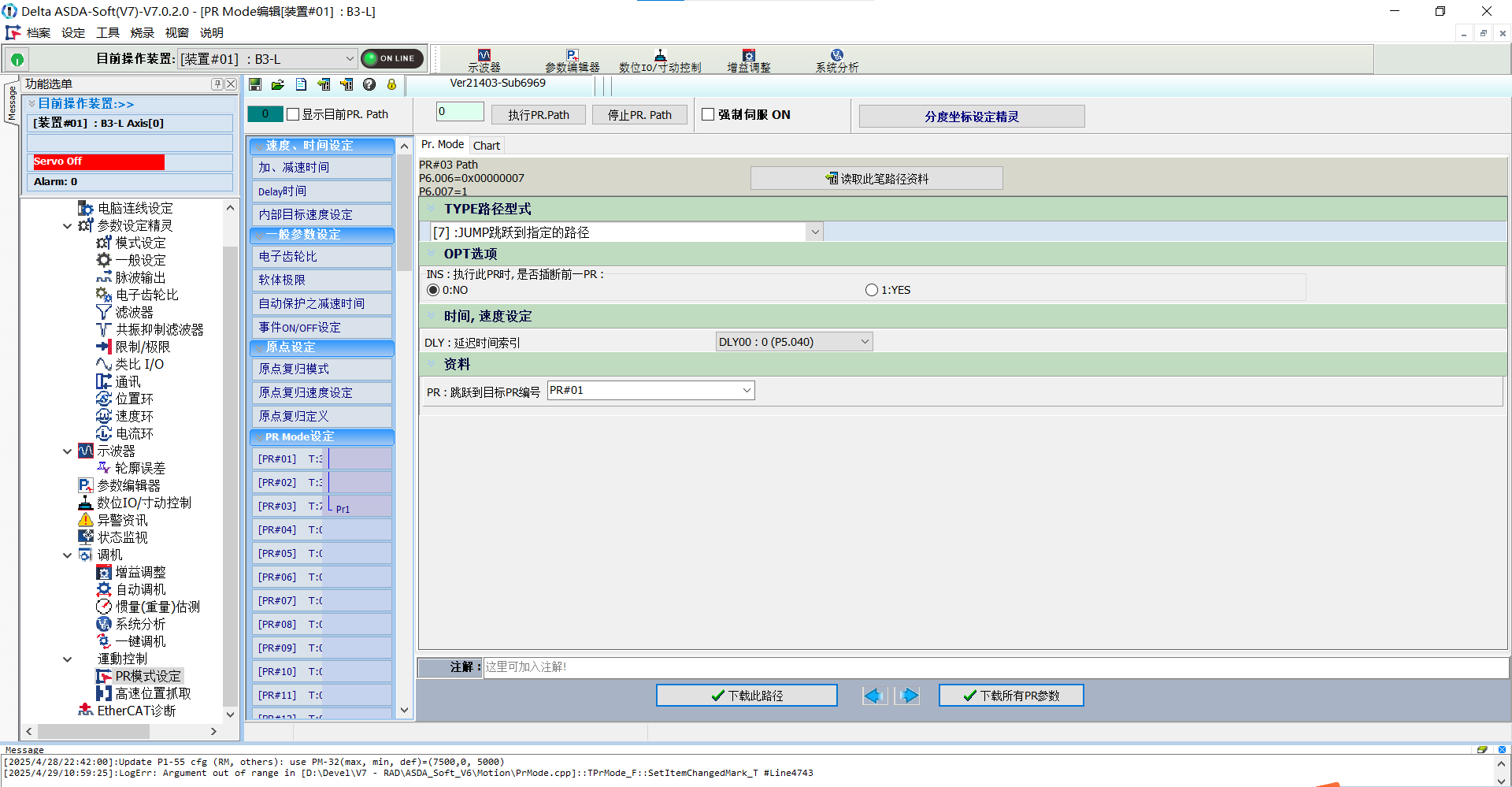
PR#03:跳转到PR#01.
1.路径参数
PR路劲设定--PR Mode设定,里面提供了100段路径的预设。
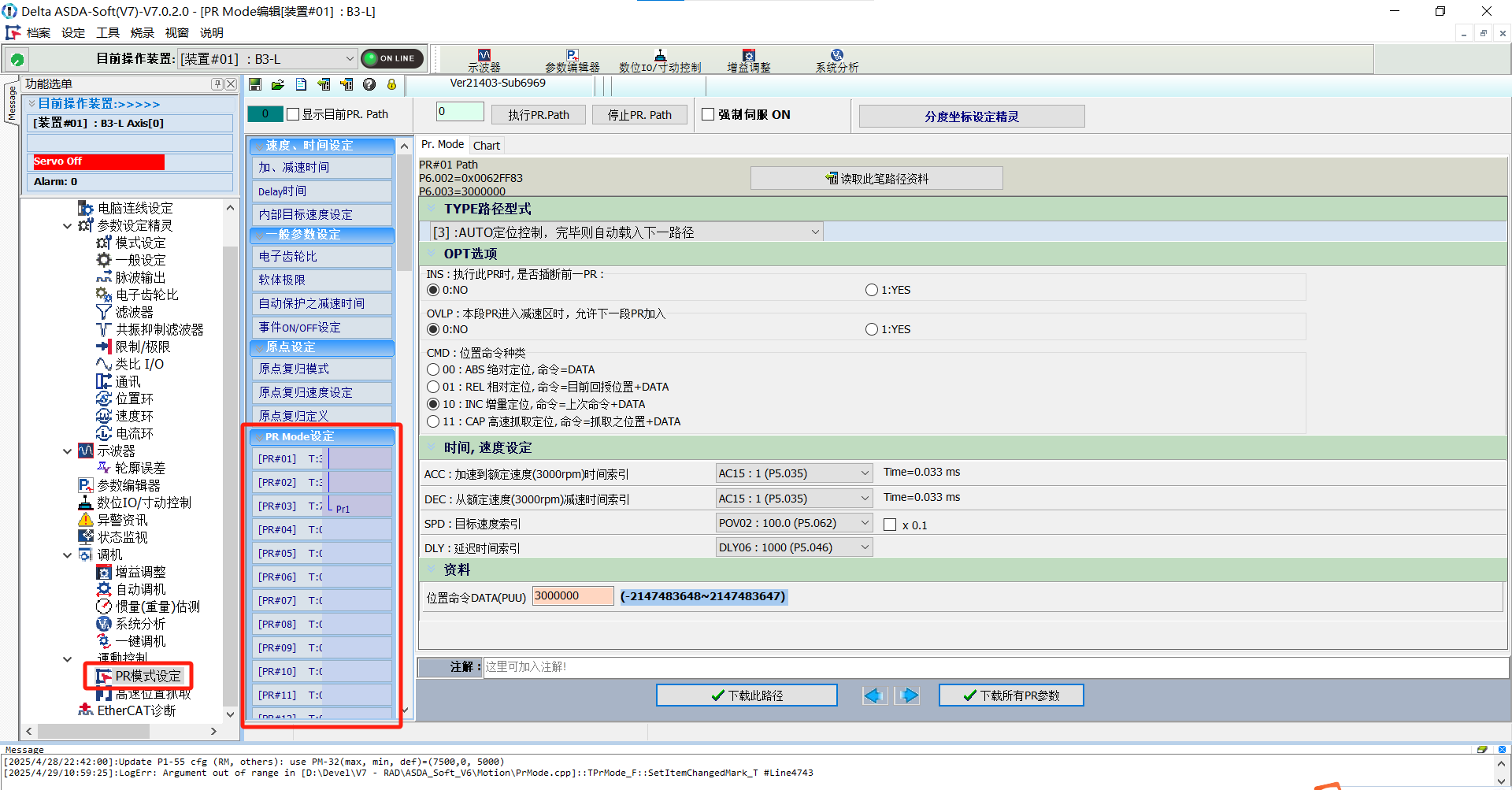
参数介绍如下:
(1)TYPE路径型式
[0]N/A:不做操作;
[1]SPEED定速控制:一直按指定速度匀速转;
[2]SINGLE定速控制:指定速度转到指定位置,完成后停止;
[3]AUTO定速控制:指定速度转到指定位置,完成后按顺序进入下一段路径;
[7]JUMP跳跃:跳到指定路径;
[8]写入指定参数到指定路径;
[0xA]分度定位控制;
PR#01:选[3],执行完进入PR#02;
PR#02:选[3],执行完进入PR#03;
PR#03:选[8],跳转到PR#01.
(2)OPT选项
INS:是否插断;这里3段路径都选no;
OVLP:减速时加入;这里3段路径都选no;
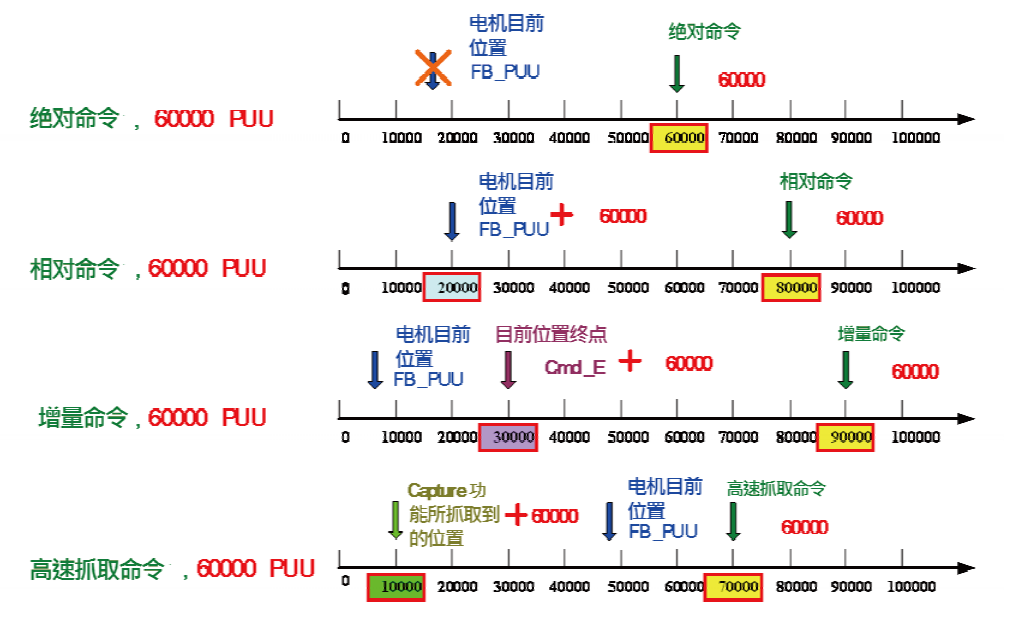
CMD:四种命令类型图解如下,这里3段路径都选增量定位。
(3)时间速度设定
ACC:加速阶段的加速度,指加速到3000rpm所需的时间,注意不是加速到目标速度的时间,例如这里目标速度是100rpm,ACC选30ms,那么实际加速阶段的时间是100rpm/3000rpm×30ms=1ms,不过软件会在旁边显示换算后的时间。
DEC:减速阶段的加速度,和上面ACC类似。
SPD:目标速度,这里PR#01和PR#02都是100rpm。可选是否×0.1,乘的话就是10rpm了。
DLY:延迟时间ms,是指完成路径的指令后静止等待的时间,这里PR#01和PR#02都是1000ms。
(4)资料
PUU:输入的脉冲数,要换算成实际电机的圈数和电子齿轮比相关(后面会介绍)。
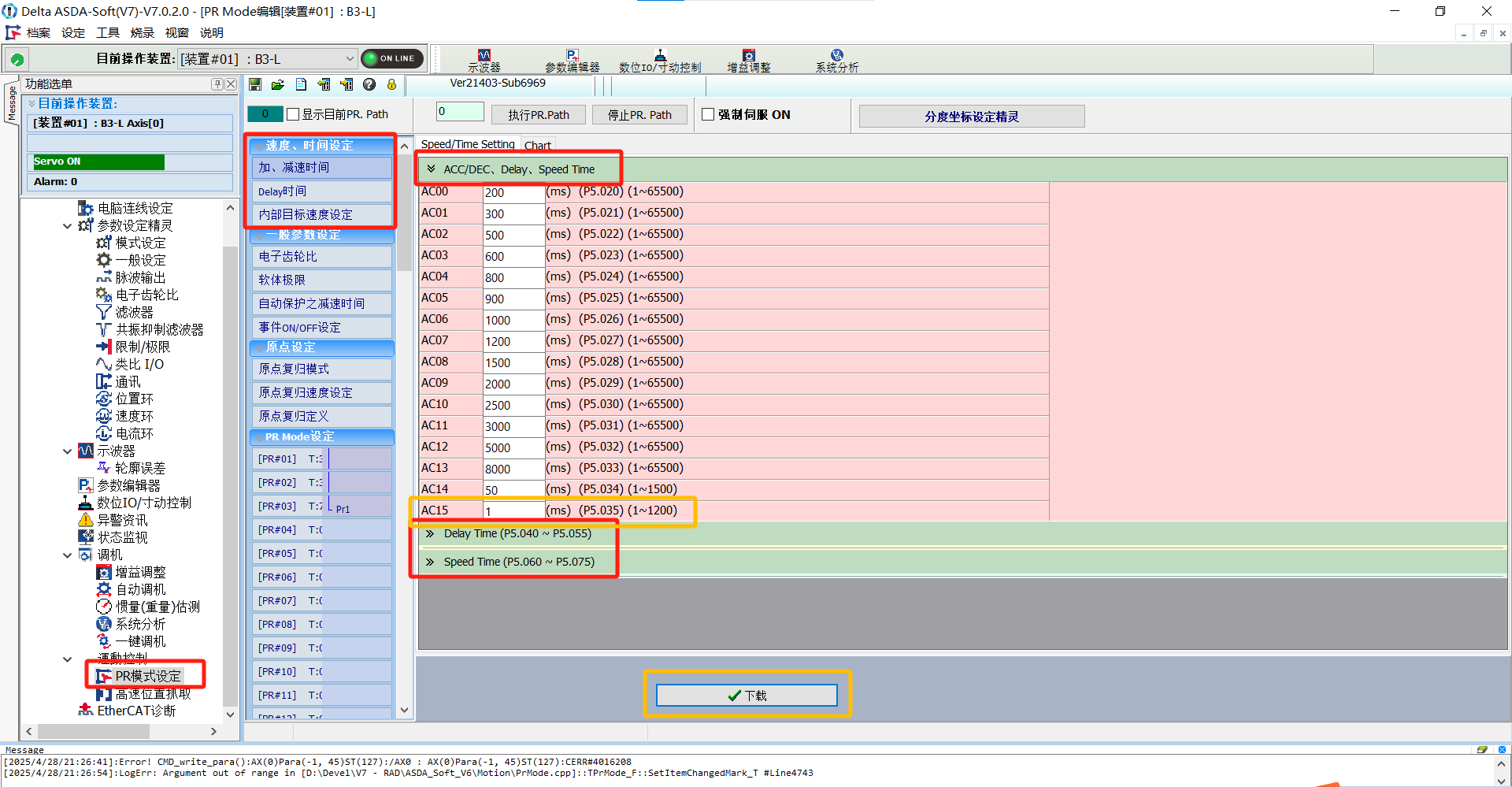
2.速度时间参数
在速度、时间设定板块里预先设置了很多可选的数值,事先写入缓存区,那么刚刚设置的ACC、DEC、SPD和DLY实际上是数据索引,也就是读取对应位置的速度、时间值。
如果默认可选的数据不满足要求,可以自己修改,比如ACC想要设置成1ms,默认的最短ACC只有20ms,那么可以在这里把其中一个数据(比如AC15)改成1,注意所有索引到AC15的时间都会变成1ms,然后点击“下载”,就更改好了,同时记得在设置PR路径时,选AC15。
Delay Time和Speed Time的设置与此类似,不再赘述。
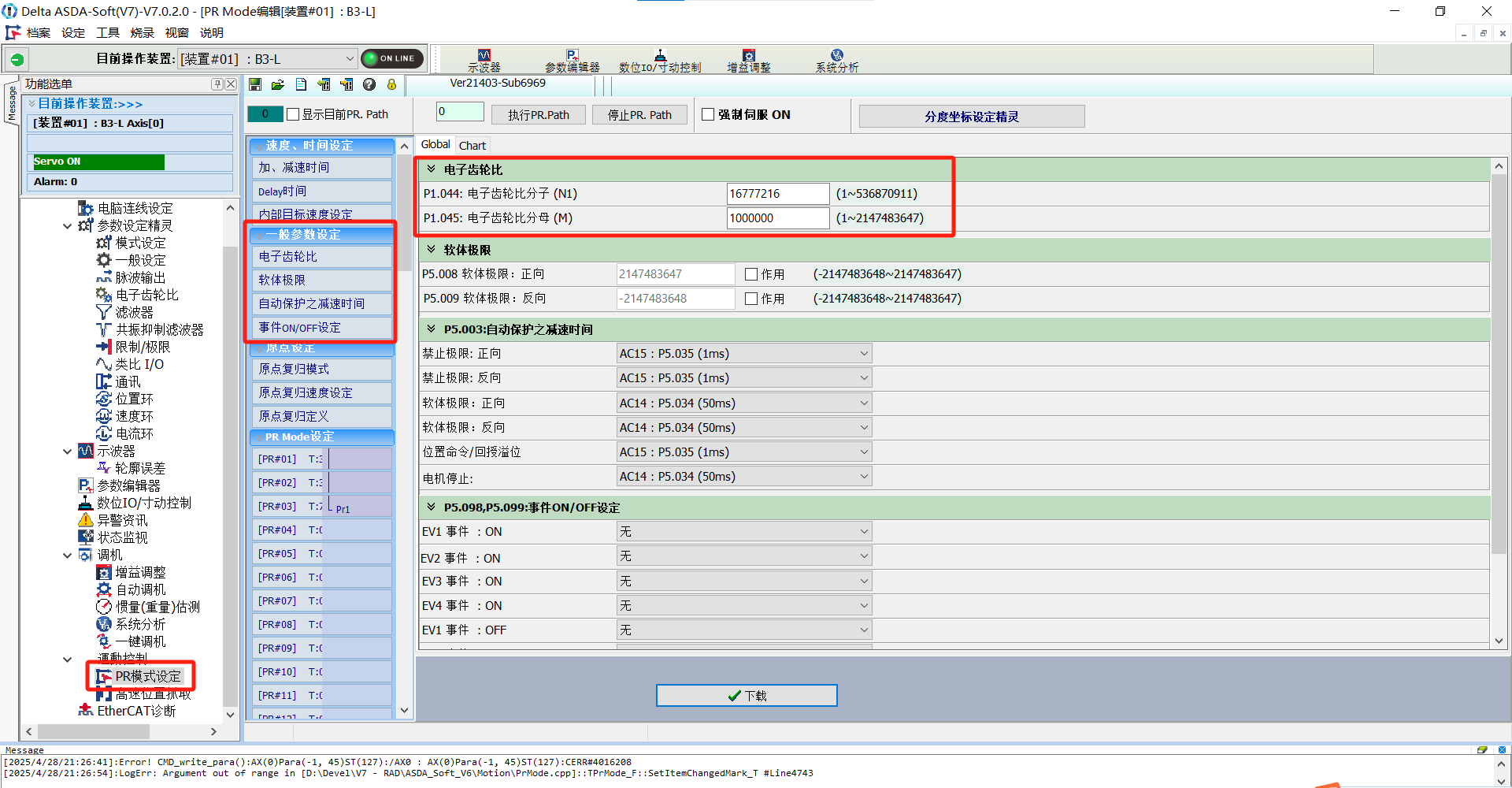
3.电子齿轮比
电子齿轮比 = 编码器一圈的脉冲数 / 电机一圈的脉冲数。
B3电机的分辨率是24bit,因此分子设置为2^24=16777216 pulse/rev
分母可以自己设置,例如这里设置为1000000 pulse/rev,那么电机转1圈需要1000000个脉冲,如果要转3圈,那么PR路径中资料一栏,位置命令DATA(PUU)设置为3000000,如果要反方向旋转就设置为-3000000。
4.下载运行
三段路径的设置如下:
PR#01:
PR#02:
PR#03:
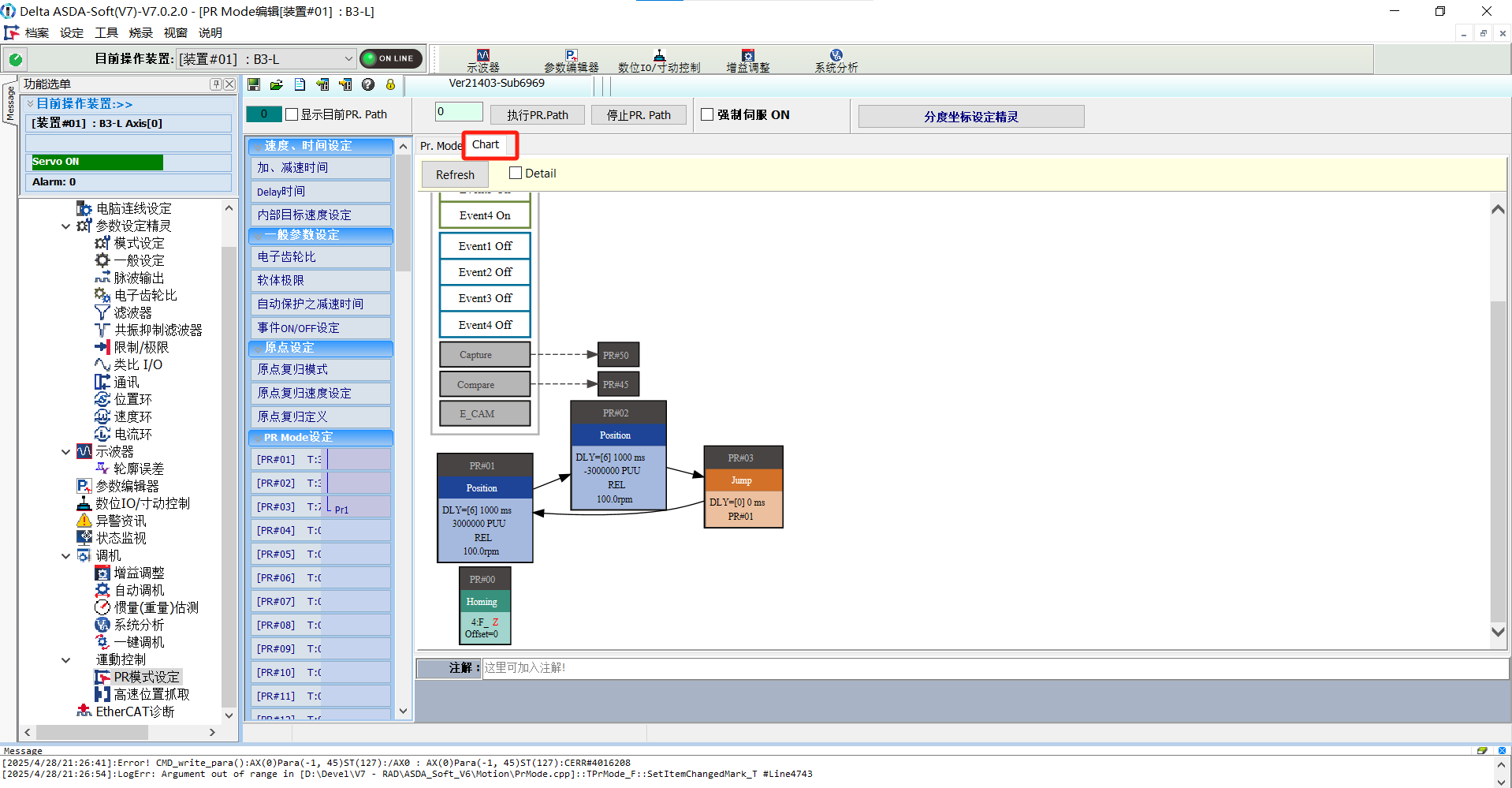
选择Chart模式的看到所有PR路径的逻辑,此时三条路径已经是循环状态了
最后回到Mode模式,下载全部路径,点击“下载所有PR参数”。
最上面一栏勾选“强制伺服ON”,输入要执行的PR路径编号“1”,点击“执行PR.Path”,点击按照设置的逻辑转起来了!点击“停止PR.Path”,就会停下来。
电机运转视频
如果前面勾选了“显示目前PR.Path”,那么灯会变成浅绿色,显示当前所处的路径编号。

此外,点击左上角的保存按钮,把设置的全部参数存储起来,下次使用就可以直接导入全部参数。
总结
本文仅仅利用ASDA-soft软件做了简单的伺服电机位置控制PR,还有很多其他的控制方式和写入指令方法,例如外部脉冲输入控制,DI触发等等,如果有更复杂的需求可以具体看说明书。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 15
15 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)