DC-DC 电压环(3)
控制算法保证了输出电压Vo在面对干扰时的稳定性。本文介绍几种基本的控制算法及其优缺点,并具体讲解电压环控制的基本流程。
控制算法保证了输出电压Vo在面对干扰时的稳定性。接下来介绍几种基本的控制算法及其优缺点,并具体讲解电压环控制的基本流程。
1、DCDC中的控制算法
1.1 滞环控制(bang bang控制器)
其核心利用一个电压比较器,输出低就加压,输出高就减压,把输出稳定在两个阈值之间。
优点:实现简单、相应快速、鲁棒性强
缺点:开关频率Fsw不固定、纹波大、对高频噪声敏感
1.2 恒定导通时间控制(COT,Constant ON-Time)
在滞环控制的基础上控制MOS导通时间恒定不变,只调节关断时间。
优点:动态响应迅速、设计简单无需补偿
缺点:开关频率Fsw不固定、纹波大、对高频噪声敏感
目前针对COT的缺点也提出了自适应COT、增强型COT等控制模式来固定频率,减小纹波。
1.3 电压环控制
开关电源最早的控制形式,把反馈带入了DCDC中,通过环路来调节DCDC的稳定性(SW jitter)、纹波和动态响应(过冲和下冲)。
优点:固定Fsw、通过环路补偿实现精确控制、抗干扰能力好
缺点:设计过程复杂,环路参数计算复杂,动态响应差
1.4 电流环控制
针对电压模式控制的不足,增加了电流环,通过控制电感电流(IL)来保持稳压。通过电流采样的位置:电感、上管(Mh)、下管(Ml)来把电流控制分为:峰值电流、平均电流、谷值电流等,其实就是控制IL的不同点。
优点:固定Fsw、消除电感极点使环路更容易控制、改善动态响应
缺点:电压环加电流环,难以建模、峰值电流控制会发散干扰,不加斜坡补偿会产生次斜坡震荡、引入电流信号的噪声需消除
2、电压环控制逻辑
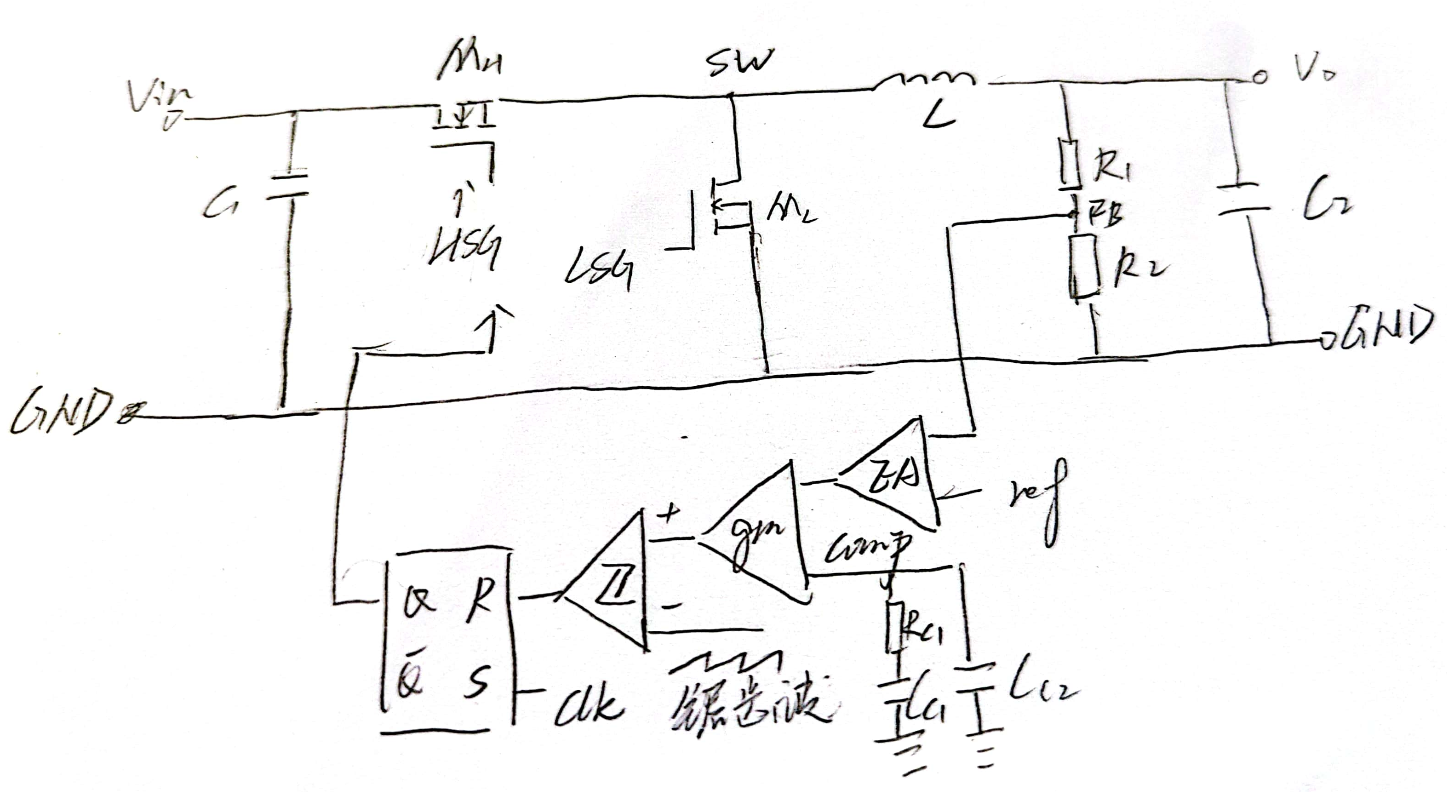
输出电压Vo通过R1、R2分压得到VFB,将其与参考电压Vref进行比较,通过EA误差放大器得到误差电压Vc,Vc经过三型补偿消除了Buck存在的LC二阶极点与输出电容C2 ESR高频零点。将得到的补偿电压Vcomp与锯齿波进行比较控制SR触发器进而控制上下管驱动电压HSG、LSG实现电压反馈。
为了保证输出的稳定性、纹波与动态响应,需要调节补偿网络参数得到合适的穿越频率与增益,三型补偿其实就是一个PID补偿,具体参数应根据控制理论进行进一步计算。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 5
5 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)