论文review 点云配准 Quatro
《ASingleCorrespondenceIsEnough:RobustGlobalRegistrationtoAvoidDegeneracyinUrbanEnvironments》由HyungtaeLim等人提出,针对城市环境中的点云全局配准问题,特别是在退化场景下的鲁棒性。文章提出了一种名为QUATRO的方法,通过解耦旋转和平移的估计,简化了计算复杂度。利用平移不变测量(TIMs)消除平移对
基本信息
题目:《A Single Correspondence Is Enough: Robust Global Registration to Avoid Degeneracy in Urban Environments》
来源:2022 ICRA
作者:Hyungtae Lim
机构:KAIST
解决问题:点云配准分为全局配准和局部配准,ICP是局部配准的算法。该文研究重点为退化场景下,基于匹配点对的点云全局配准问题。
QUATRO: QUASI-SE(3) ESTIMATION
B. Decoupling Rotation and Translation Estimation
解耦的必要性
同时估计旋转 R 和平移 t 是一个非线性问题,复杂度较高。通过分离两者的估计(先求 R,再求 t),可以简化问题并降低计算成本。
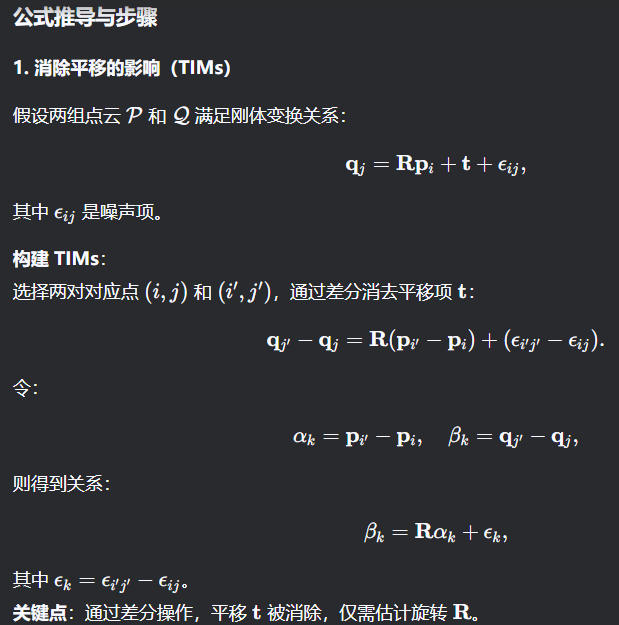
平移不变测量(TIMs)
通过构建平移不变测量(Translation-Invariant Measurements, TIMs),消除平移 t 对旋转估计的影响。具体做法是对点对进行差分操作,抵消平移项。
通过匹配对pi和qi之间两两相减,可以消除平移的影响.

则任意两匹配对αk和βk满足βk = Rαk + ek。

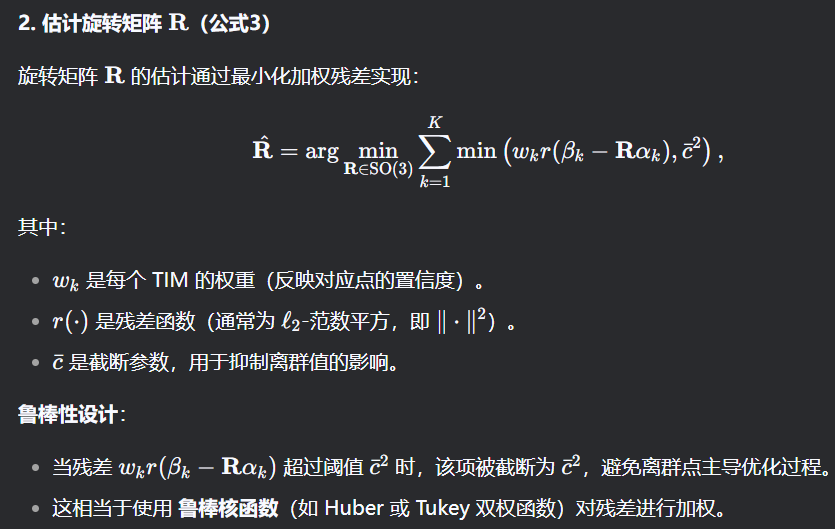
将左右匹配对根据不同的权重累加,得到R的cost function

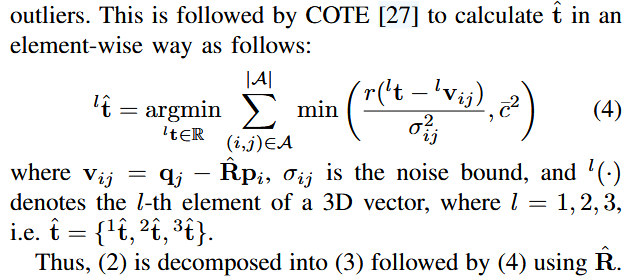
最后,根据R的残差,分离坐标轴计算t:

C. Quasi-SO(3) in Urban Environments
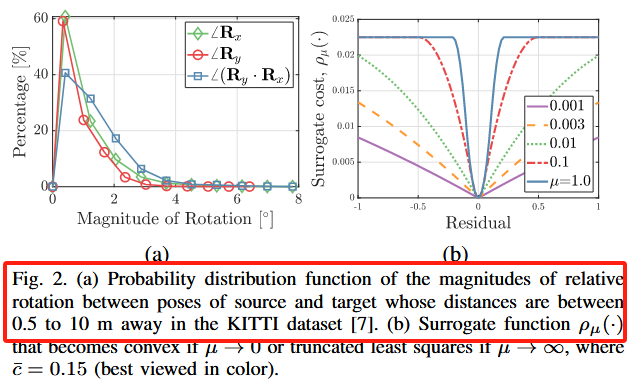
接下来,我们引入quasi - SO ( 3 )的概念。相对旋转可以近似为城市环境中的纯偏航旋转。这是因为,即使城市环境不是平坦的,基于亚特兰大世界假设,源和目标云对应的两个姿态也可以局部近似为共面。因此,偏航旋转被认为比滚转和俯仰旋转占主导地位。
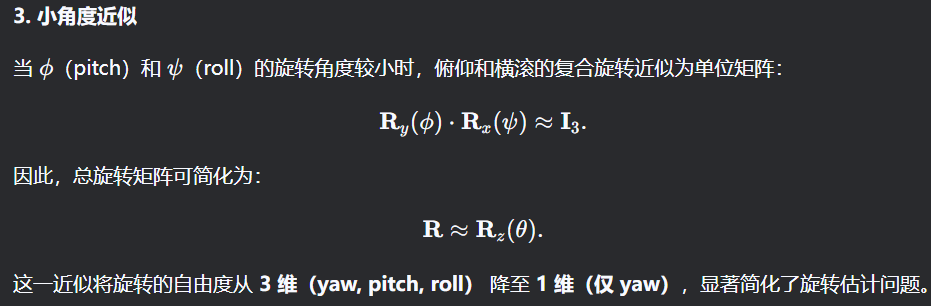
旋转矩阵R=Rx*Ry*Rz,但是Rx*Ry的值非常小,根据小角度近似,R≈Rz,此时旋转的自由度从3降低为1,使此方法对退化场景具备鲁棒性,计算公式为:
但是本方法会被质疑,该方法在非平坦的区域不成立,或者两帧相距距离太大导致两帧不处于同一个共视平面。然而,目前大多数测绘/导航系统采用惯性导航系统( INS )。因此,通过从重力向量估计水平面,横滚角和俯仰角是完全可观测的。因此,横滚和俯仰可以表示为世界坐标下的绝对状态,这意味着它们是无漂移的。因此,这仍然允许我们的目标是有效的,同时将相对旋转限制为相对偏航旋转(见第四节D)。
D. Quasi-SO(3) Estimation using Graduated Non-Convexity
为了估计R+(只有Rz的R),引入GNC(Graduated Non-Convexity)。对原来的cost function重写,采用 Black-Rangarajan duality(对偶)。通过引入权重 wk 将问题分解为可交替优化的子问题。
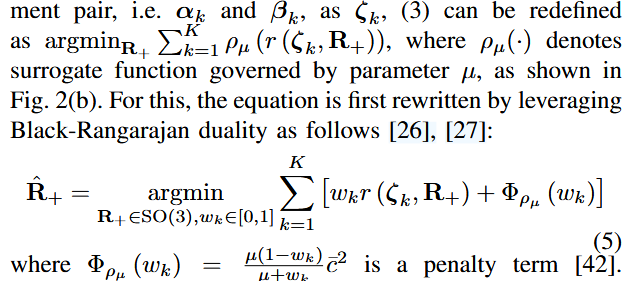
则公式5,可通过以下公式进行交替优化:
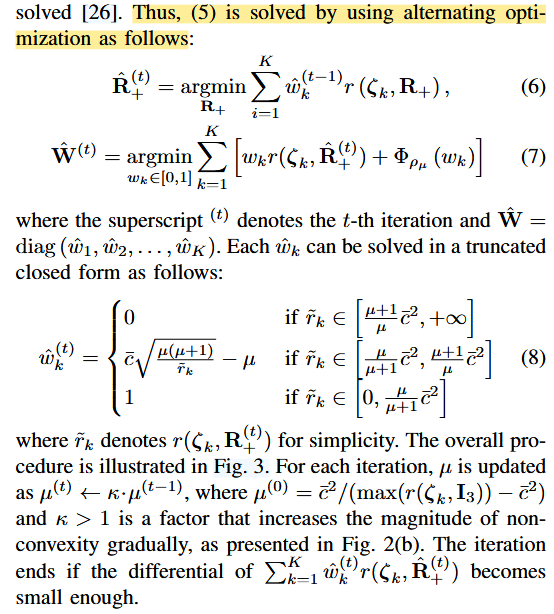
交替优化过程:
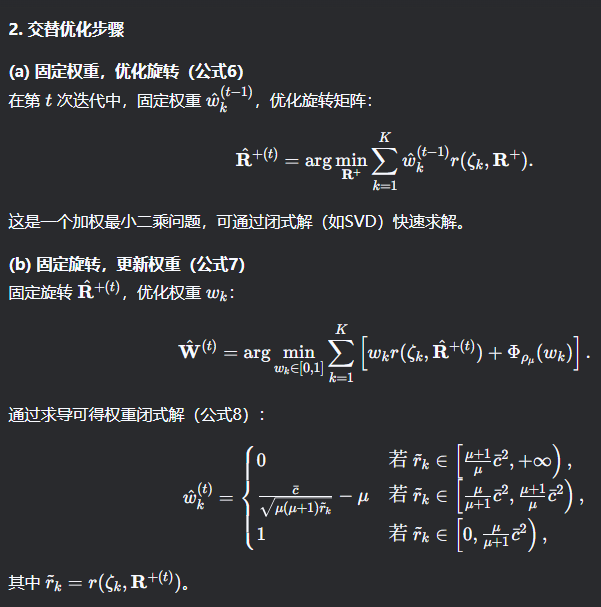
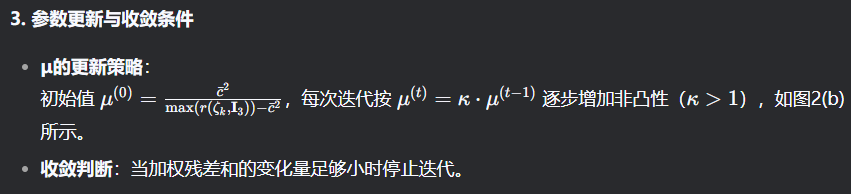
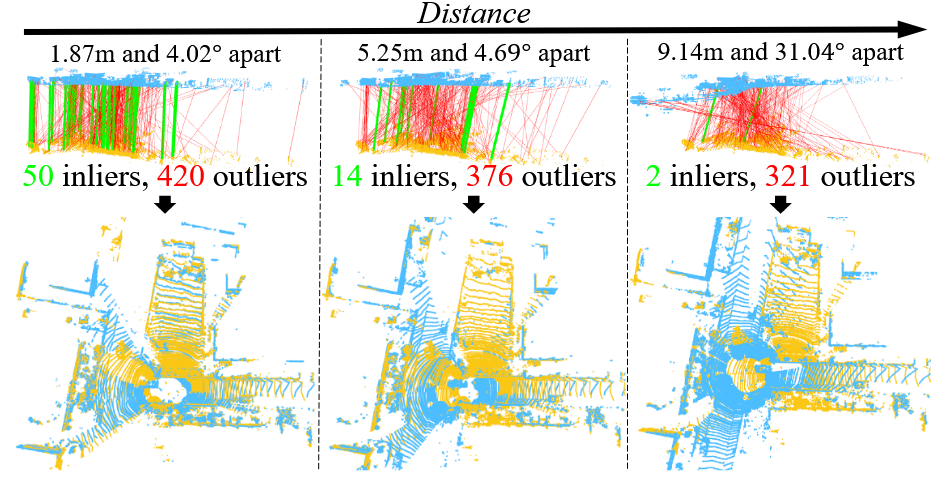
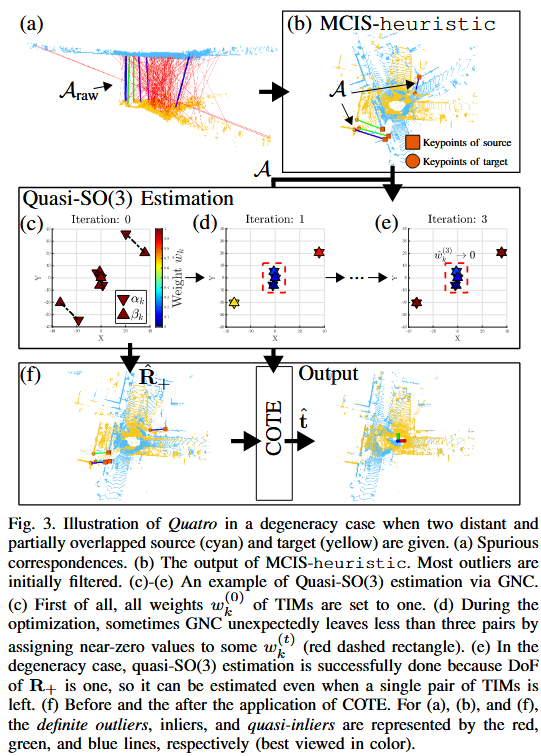
图3(c)表明,在第一次迭代中,外点对优化有直接的影响,但是随着迭代进行权重重新分配,大部分权重变成0,如图3(d),导致系统退化。R+存在三点优势:
- R+的计算方式解决了退化问题,R+ 仅需1自由度,相比全旋转矩阵(3自由度)更少依赖测量数量,避免因有效数据不足导致的退化(如远距离场景)。
- R+有效抑制了外点的影响。通过公式8分段剔除大残差对应权重,结合GNC逐步收紧非凸性,平衡离群值排除与模型稳定性。准内点利用:垂直方向误差不影响偏航角估计,扩大有效内点范围。
- 提升内殿比例:准内点的加入提高有效数据比例,避免GNC因离群过多而发散(有文献指出高离群率易导致发散)。
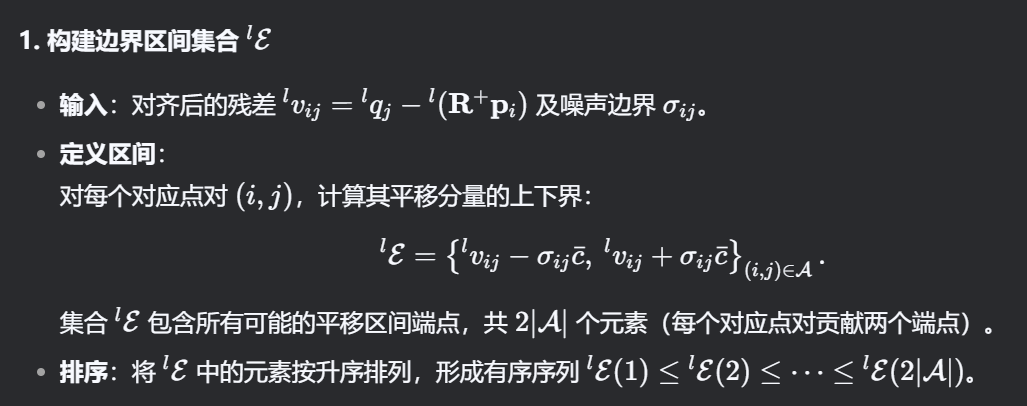
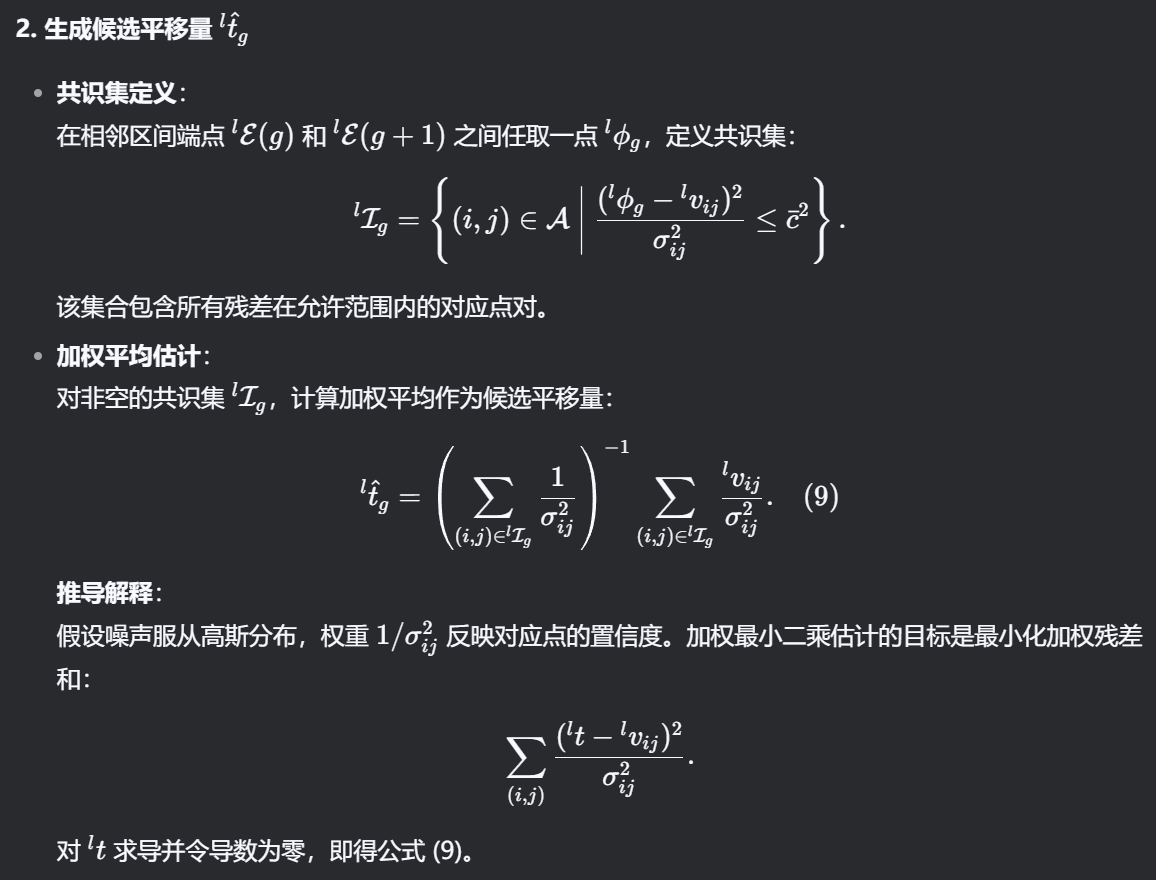
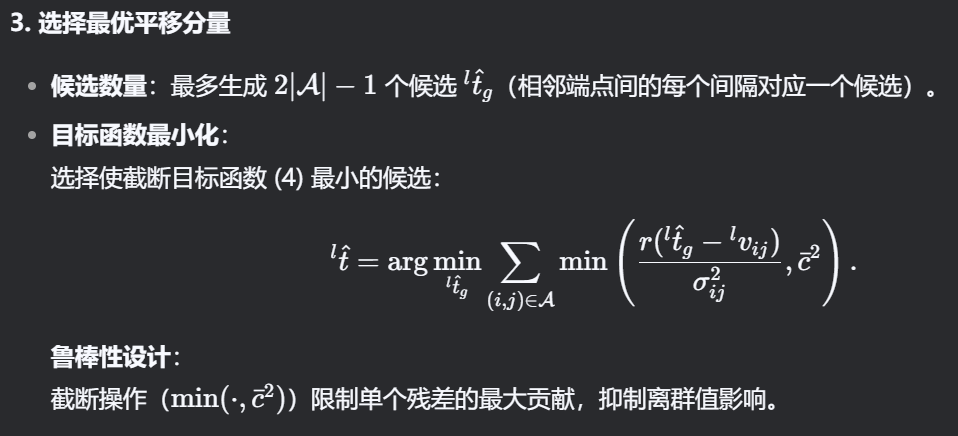
E. Component-wise Translation Estimation
在旋转矩阵 R+已精确估计的前提下,平移向量 t 的每个坐标轴分量(x,y,z)被独立估计。该方法通过构建候选平移区间并选择最优解,避免全局优化中的离群值干扰,具体步骤如下:
-
退化的鲁棒性:即使仅剩一对有效对应(∣A∣=1∣A∣=1),仍可通过区间估计避免完全失败。
-
计算效率:分量独立估计将三维问题分解为三个一维问题,复杂度从 O(∣A∣3)O(∣A∣3) 降至 O(∣A∣)O(∣A∣)。
F. Preprosessing of Correspondences
原始FPFH对64线激光雷达点云计算耗时过长(数十秒)。采用体素降采样之后再使用FPFH。
FPFH的结果包含大量错误点,通过特征匹配生成初始对应关系(图3(a)。采用最大团内点选择(MCIS):使用最大团算法筛选内点,输出净化后的对应集 A(图3(b))。
实验
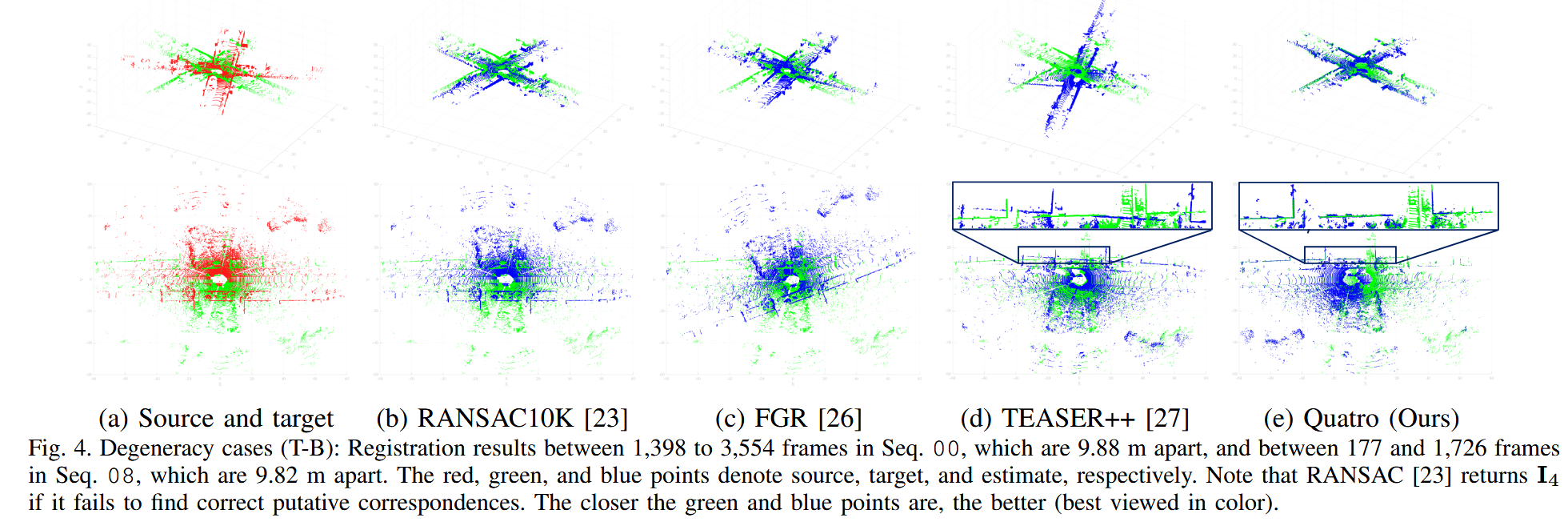
匹配结果的定性分析:
匹配成功率: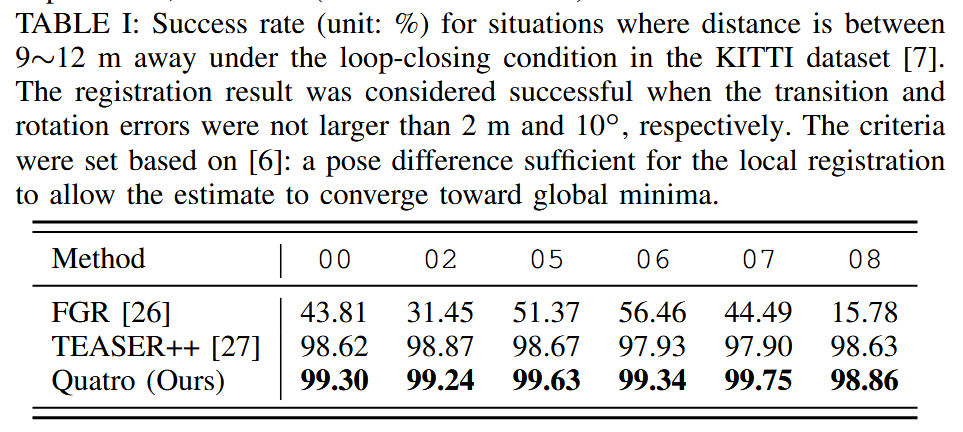
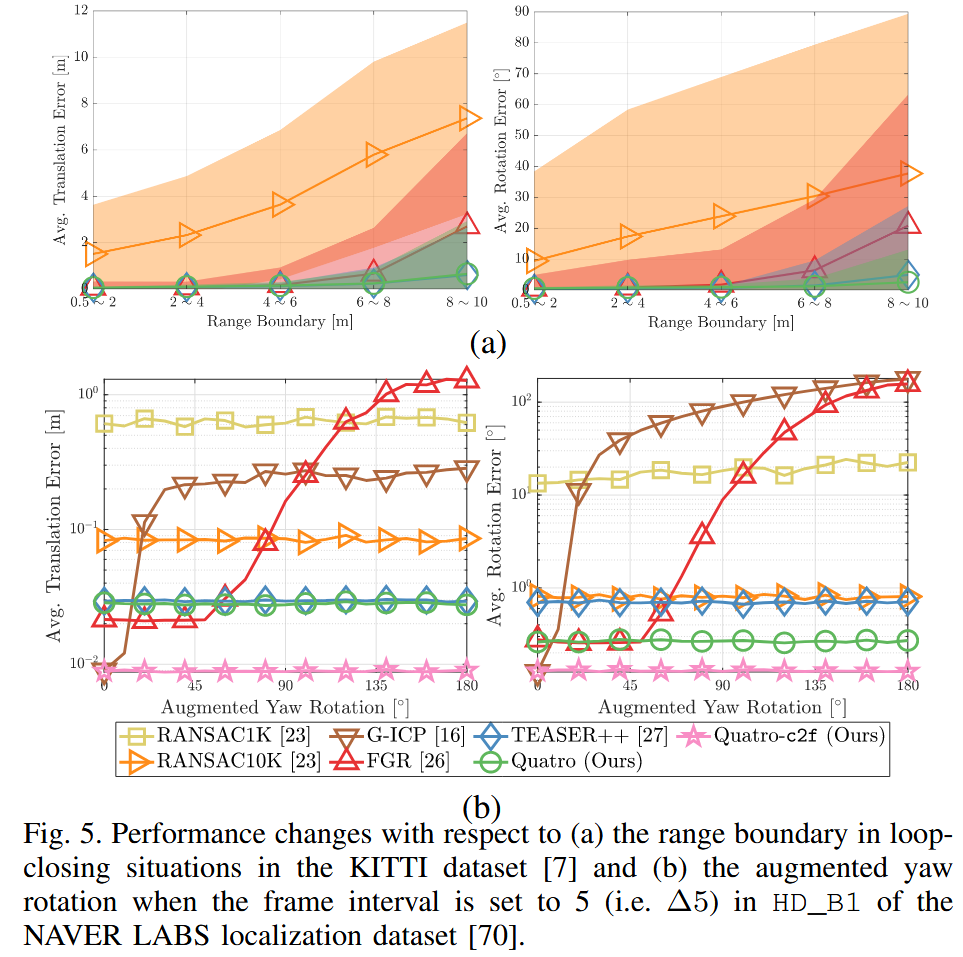
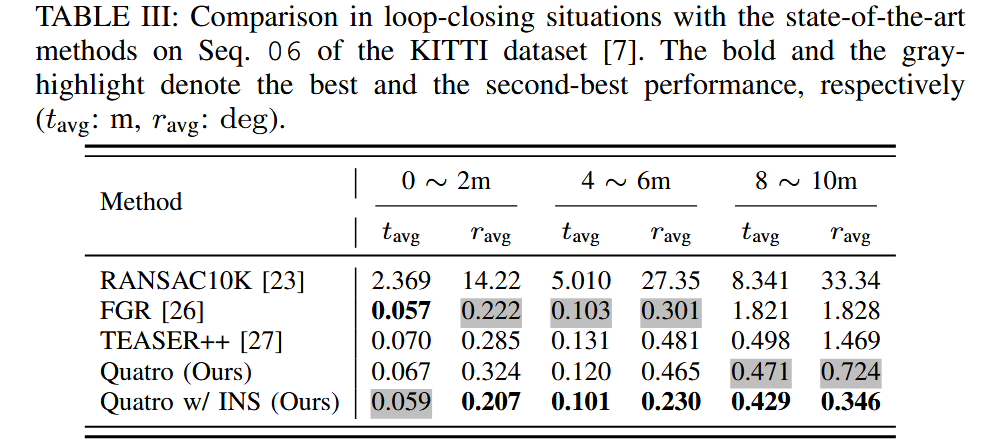
匹配精度:
 使用quatro作为配准初值,再使用精配准之后的指标都非常理想:
使用quatro作为配准初值,再使用精配准之后的指标都非常理想: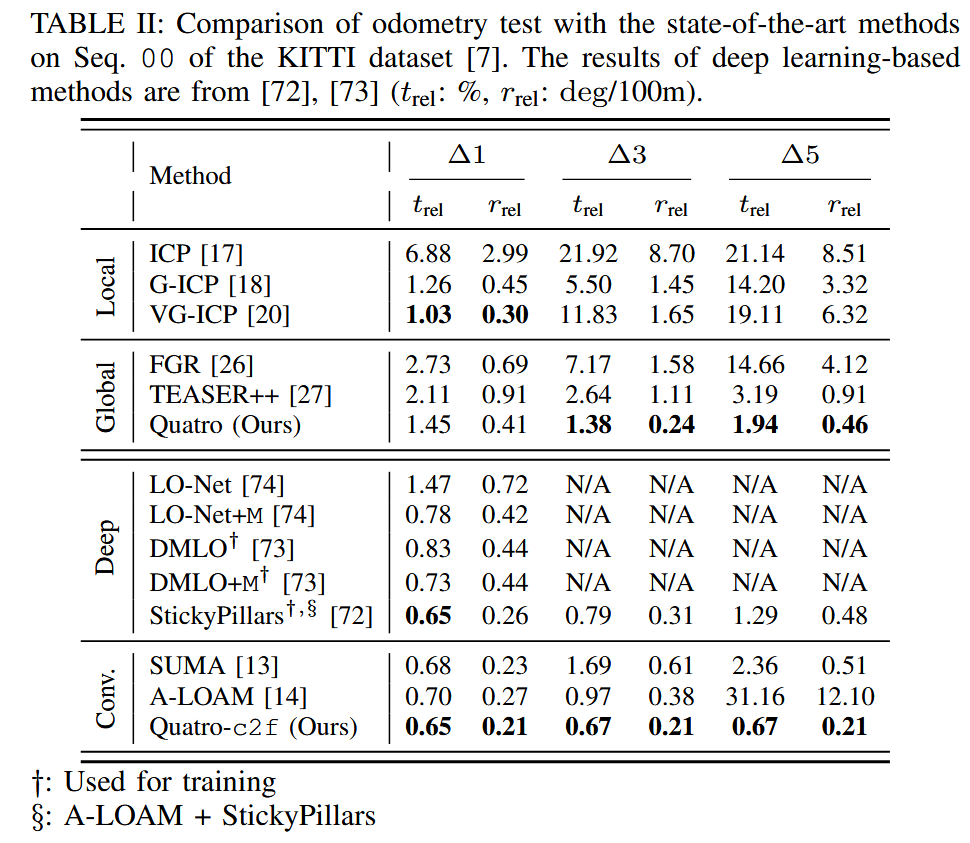
使用IMU作为辅助,匹配结果会更加准确
 运行速度在5ms左右,满足实时性要求。
运行速度在5ms左右,满足实时性要求。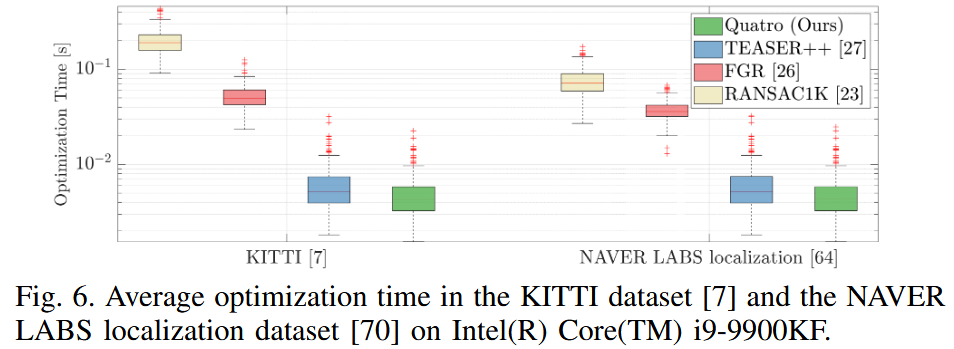

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 15
15 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)