unitree_guide,ROS仿真学习笔记
基于宇树《四足机器人控制算法》学习笔记
·
unitree_guide/ros/sdk 安装参考:(我的环境跟博主是一样的)
基于宇树《四足机器人控制算法》学习笔记
1.电机控制模式
- 位置模式:电机输出转到一个固定的目标位置
- 速度模式:电机固定速度转动
- 阻尼模式:开机时自动进入,固定扭矩无法转动
- 力矩模式:输出恒定力矩
- 零力矩模式:转轴力矩为0,阻力很小
- 混合控制:同时输出力矩,速度和位置,应用最多
- 电机运行模式(mode):0:停转;5:开环;10:伺服闭环
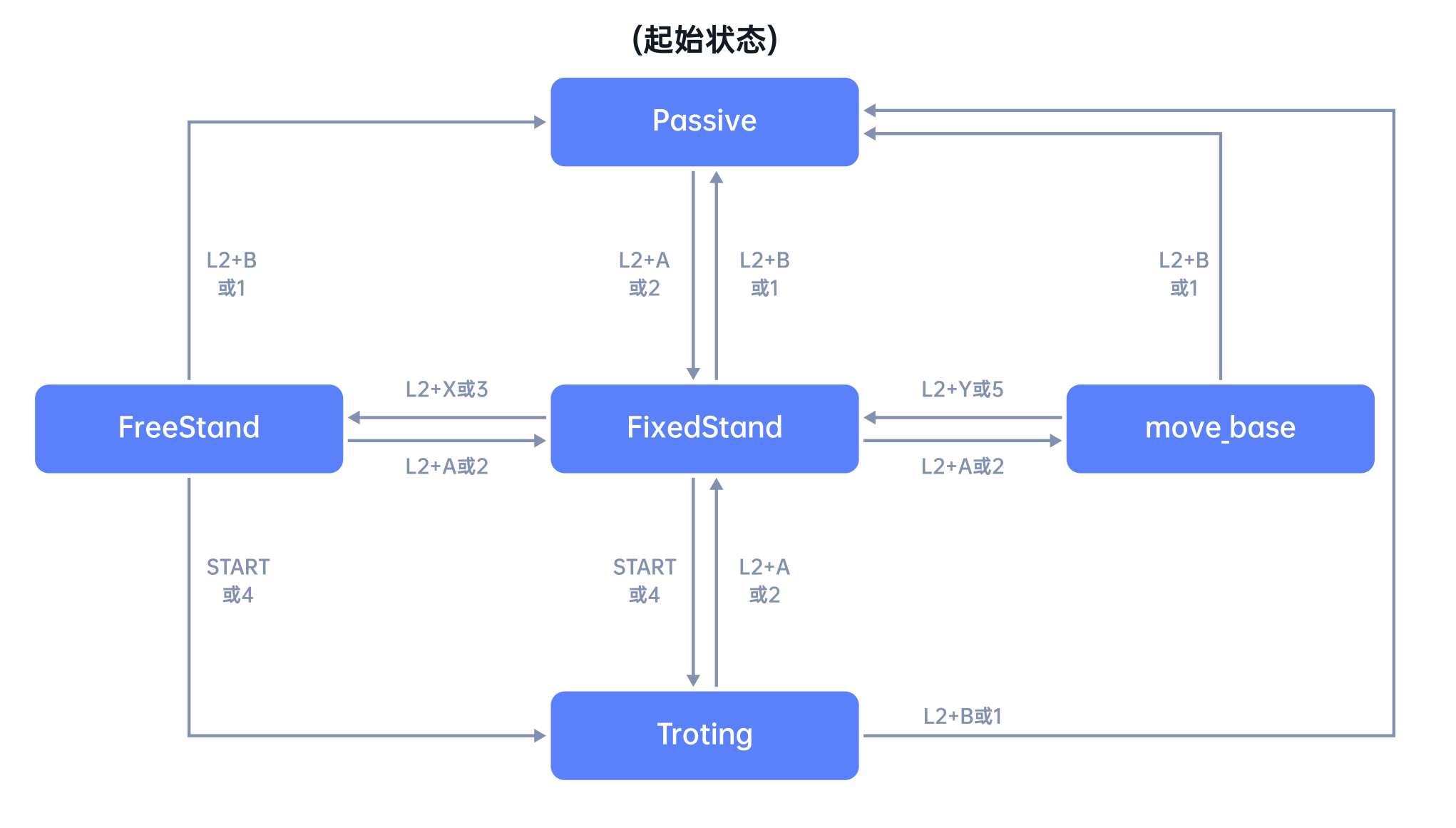
2.机器狗状态机
- 启动时为passive (阻尼模式):机器狗为趴下状态
- 按键2为fixedStand(固定站立模式):关节电机转至给定值锁死。
- 按键3为freeStand(自由站立):可以根据手柄或键盘命令更改姿态。
- 按键4为trotting(对脚步态模式):使用键盘或手柄控制时,用对角步态行走。
- 按键5为moveBase(导航避障模式):将move_base的命令转为机器狗运动指令
- 状态机执行函数:
- 在FSMState.h头文件中定义了基类其中关键的函数如下
virtual void enter() = 0;//进入状态(切换状态时执行) virtual void run() = 0;//运行状态(一直循环执行) virtual void exit() = 0;//退出状态(退出该状态时执行) virtual FSMStateName checkChange() {return FSMStateName::INVALID;}//检查状态转换条件(是否需要切换其他步态)
- 在FSMState.h头文件中定义了基类其中关键的函数如下
3.关节零角度定义
遵循右手坐标系,机器人正前方为 X,向左为Y,向上为Z
小腿大腿垂直于地面为0角度(小腿大腿平行,实际并不能到达0角度,只作为定义)
4. 固定站立模式
-
在unitree_guide\include\FSM\FSMState.h 中定义了FSMState 的基类
-
class FSMState{ public: FSMState(CtrlComponents *ctrlComp, FSMStateName stateName, std::string stateNameString); virtual void enter() = 0;//进入状态函数,切换状态后执行一次 virtual void run() = 0;//状态循环函数,没有检测到切换状态,就一直在这个函数循环 virtual void exit() = 0;//检测到切换状态时退出此状态 virtual FSMStateName checkChange() {return FSMStateName::INVALID;}//检查状态变更 FSMStateName _stateName; std::string _stateNameString; protected: CtrlComponents *_ctrlComp; FSMStateName _nextStateName; LowlevelCmd *_lowCmd; LowlevelState *_lowState; UserValue _userValue; };
-
-
State_FixedStand.cpp中继承了FSMState类。它用于控制一个机器人在固定站立状态下的行为。
class State_FixedStand : public FSMState {//State_FixedStand`继承自`FSMState public: State_FixedStand(CtrlComponents *ctrlComp) : FSMState(ctrlComp, FSMStateName::FIXEDSTAND, "fixed stand") {} //初始化状态的基本信息,包括控制组件、状态名称
-
enter()方法
- 循环遍历四个腿,根据当前控制平台(Gazebo或real)设置相应的kp/kd。
- 将每个腿的速度(dq)和力矩(tau)设为零。(位置模式不需要力矩和转速,只需要角度值)
- 循环遍历12个电机,将每个电机的目标角度设为当前角度,并记录起始位置。
- 调用setAllStance(),用于设置机器人的整体姿态。
- 循环遍历四个腿,根据当前控制平台(Gazebo或real)设置相应的kp/kd。
void State_FixedStand::enter() {//进入状态时的初始化函数
for(int i=0; i<4; i++) {
if(_ctrlComp->ctrlPlatform == CtrlPlatform::GAZEBO) {
_lowCmd->setSimStanceGain(i);
} else if(_ctrlComp->ctrlPlatform == CtrlPlatform::REALROBOT) {
_lowCmd->setRealStanceGain(i);
}
_lowCmd->setZeroDq(i);//转速设0
_lowCmd->setZeroTau(i);//力矩设0
}
for(int i=0; i<12; i++) {
_lowCmd->motorCmd[i].q = _lowState->motorState[i].q;
_startPos[i] = _lowState->motorState[i].q;//记录起始位置
}
_ctrlComp->setAllStance();
}
```
/*循环遍历四个腿,根据当前控制平台(Gazebo或real)设置相应的kp/kd。
- 将每个腿的速度(dq)和力矩(tau)设为零。
- 循环遍历12个电机,将每个电机的目标角度设为当前角度,并记录起始位置。
- 调用setAllStance(),用于设置机器人的整体姿态。*/
include\message\LowlevelCmd.h
void setSimStanceGain(int legID){
motorCmd[legID*3+0].mode = 10;
motorCmd[legID*3+0].Kp = 180;
motorCmd[legID*3+0].Kd = 8;
motorCmd[legID*3+1].mode = 10;
motorCmd[legID*3+1].Kp = 180;
motorCmd[legID*3+1].Kd = 8;
motorCmd[legID*3+2].mode = 10;
motorCmd[legID*3+2].Kp = 300;//小腿力臂最大,负载也最大值调高
motorCmd[legID*3+2].Kd = 15;
}-
run()方法
- 从起始角度到目标角度进行线性插值,使关节缓慢运行至目标角度
void State_FixedStand::run() {
_percent += (float)1/_duration;
_percent = _percent > 1 ? 1 : _percent;
for(int j=0; j<12; j++) {
_lowCmd->motorCmd[j].q = (1 - _percent)*_startPos[j] + _percent*_targetPos[j];
}
}
/*持续执行的行为:
- 增加完成百分比:根据状态持续时间(`_duration`)线性增加完成度(`_percent`),最多达到1。
- 插值目标位置:每个电机的目标角度根据起始位置(`_startPos`)和目标位置(`_targetPos`)进行线性插值,逐步移动到目标位置。*/-
exit()方法
```cpp
void State_FixedStand::exit() {
_percent = 0;
}
```
//离开状态时的清理:重置完成百分比,以便下次进入状态时重新开始。-
checkChange()方法
FSMStateName State_FixedStand::checkChange() {
if(_lowState->userCmd == UserCommand::L2_B) {
return FSMStateName::PASSIVE;
} else if(_lowState->userCmd == UserCommand::L2_X) {
return FSMStateName::FREESTAND;
} else if(_lowState->userCmd == UserCommand::START) {
return FSMStateName::TROTTING;
} else if(_lowState->userCmd == UserCommand::L1_X) {
return FSMStateName::BALANCETEST;
} else if(_lowState->userCmd == UserCommand::L1_A) {
return FSMStateName::SWINGTEST;
} else if(_lowState->userCmd == UserCommand::L1_Y) {
return FSMStateName::STEPTEST;
}
#ifdef COMPILE_WITH_MOVE_BASE
else if(_lowState->userCmd == UserCommand::L2_Y) {
return FSMStateName::MOVE_BASE;
}
#endif // COMPILE_WITH_MOVE_BASE
else {
return FSMStateName::FIXEDSTAND;
}
}
/*状态转换检查:
- 根据用户命令(`userCmd`)判断是否需要转换到其他状态。
- 返回对应的状态枚举值,如`PASSIVE`、`FREESTAND`等。
- 如果没有有效命令,保持当前状态(`FIXEDSTAND`)。*/5.编译选项
文件目录:unitree_guide\CMakeLists.txt
cmake_minimum_required(VERSION 3.14)
project(unitree_guide)
set(ROBOT_TYPE Go1) # 机器人型号, support Go1 and A1 currently
set(PLATFORM amd64) #上位机环境架构 to compile, support amd64 and arm64
set(CATKIN_MAKE ON) # Use CATKIN_MAKE or not, ON or OFF
set(SIMULATION ON) # Use Gazebo or not, ON or OFF
set(REAL_ROBOT OFF) # Link real robot or not, ON or OFF
set(DEBUG OFF) # Use debug functions or not, ON or OFF
set(MOVE_BASE OFF) # 是否使用导航模式6.

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 26
26 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)