带你了解51单片机AD/DA转换
本章对51单片机的AD/DA转换进行讲解
目录
1.AD/DA介绍
AD(Analog to Digital):模拟-数字转换,将模拟信号转换为计算机可操作的数字信号
DA(Digital to Analog):数字-模拟转换,将计算机输出的数字信号转换为模拟信号
AD/DA转换打开了计算机与模拟信号的大门,极大的提高了计算机系统的应用范围,也为模拟信号数字化处理提供了可能

2.硬件电路模型
AD转换通常有多个输入通道,用多路选择开关连接至AD转换器,以实现AD多路复用的目的,提高硬件利用率
AD/DA与单片机数据传送可使用并口(速度快、原理简单),也可使用串口(接线少、使用方便)
可将AD/DA模块直接集成在单片机内,这样直接写入/读出寄存器就可进行AD/DA转换,单片机的IO口可直接复用为AD/DA的通道
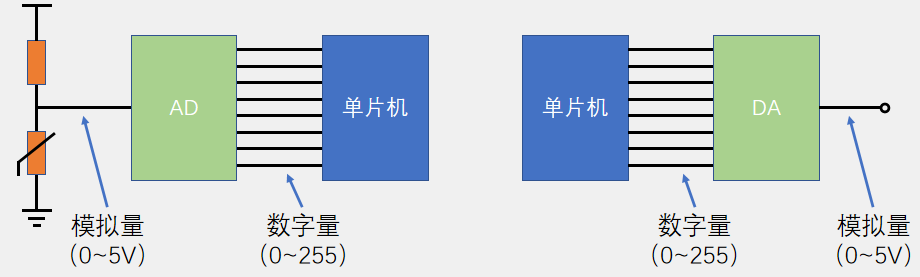
数字量和模拟量成正比关系
注:这里的串口和51单片机其他模块的串口不一样;DA使用比较少,AD使用比较多
3.硬件电路
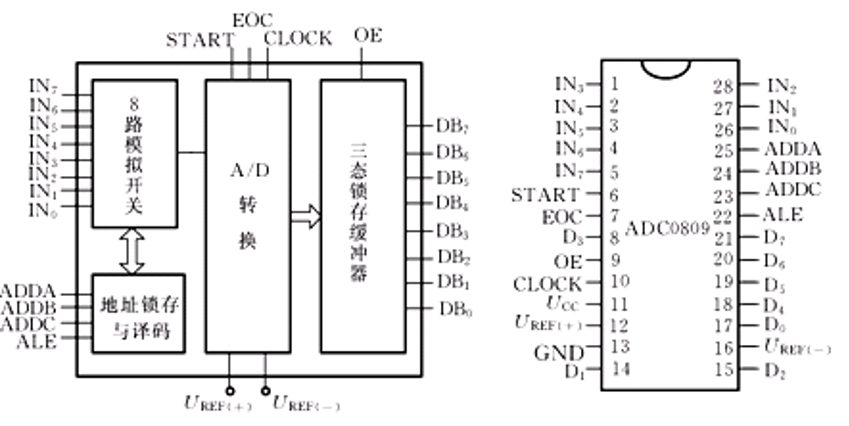
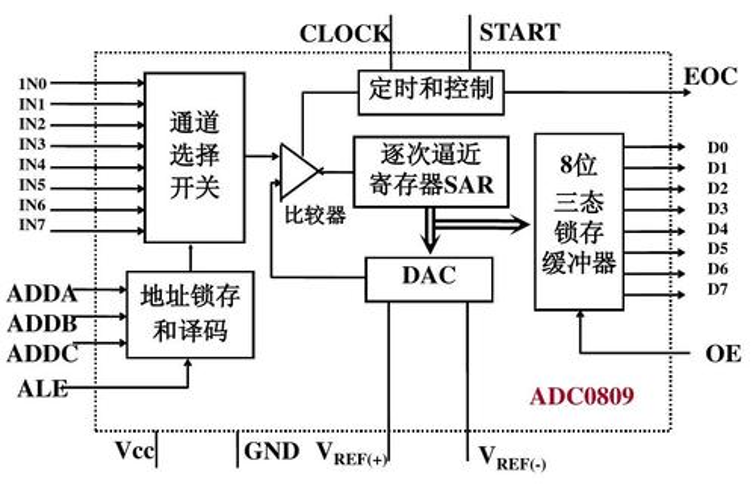
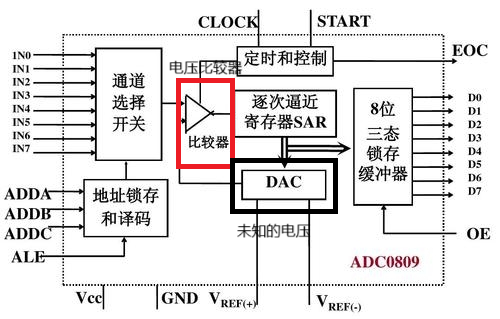
ADC0809:
通过IN0~IN7输入信号,具体要输入什么信号,就要靠地址锁存与译码,A/D转换信号要靠START(开始转换)、EOC(结束转换)、CLOCK(转换时序)将信号通过锁存器进行输出缓存,最后靠输出使能(OE)给输出出去DB0~DB7
DAC0832:
输入信号D0~D7,放在两个寄存器(8位输入寄存器、8位DAC寄存器)里面,再同时ILE~XFER这些发出输出信号,然后两个寄存器就能通过8位D/A转换器输出信号
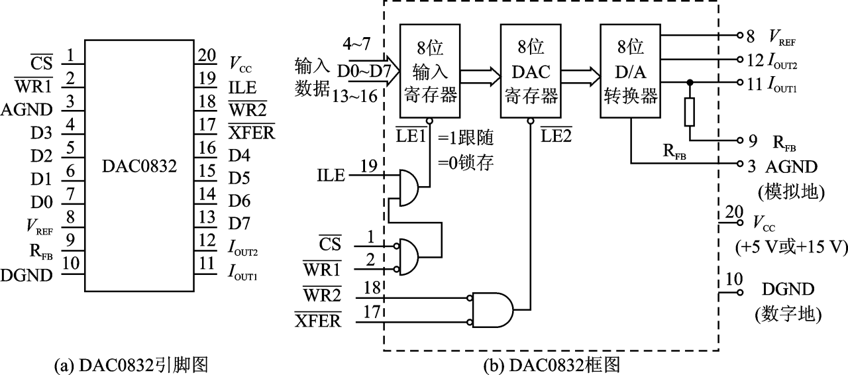
以上的ADC0809和DAC0832这两个芯片比较经典简单,比较容易理解,但不推荐使用这两个芯片,年代有点远。
PCF8591(推荐使用)
使用简单,用II2C总线的读写,就可以实现AD和DA的功能
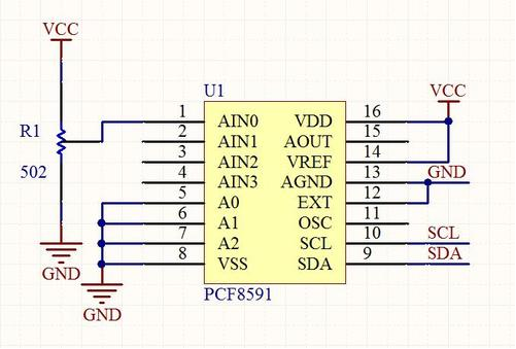
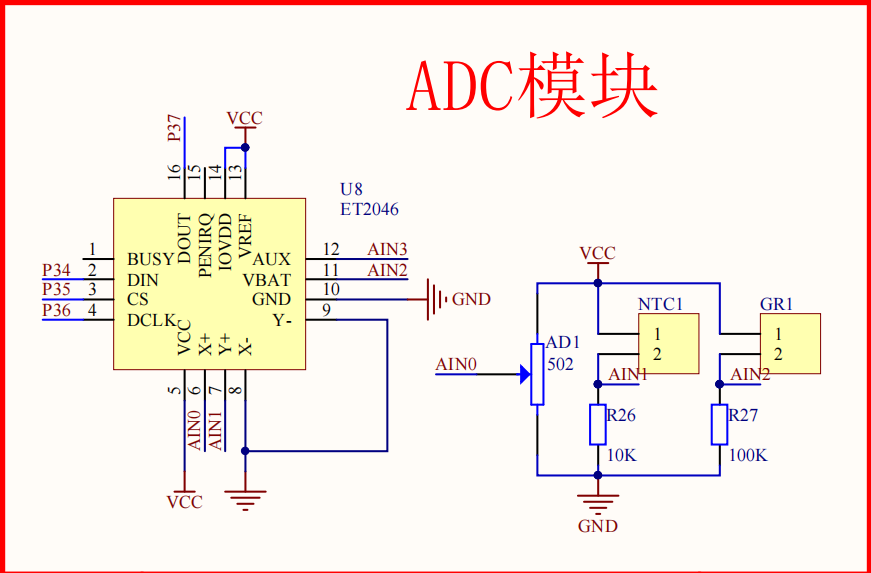
ADC模块:
AIN0\AIN1\AIN2:光敏、热敏、可调节;数字量(0-255)、模拟量(0-5V);ADC触摸屏芯片
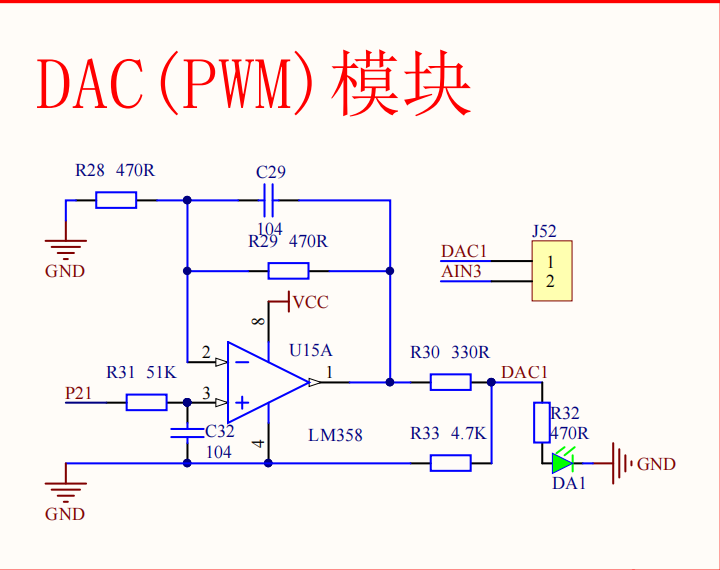
DAC模块:
在P21输出PWM波形,通过这个低通率波,就可以使用了
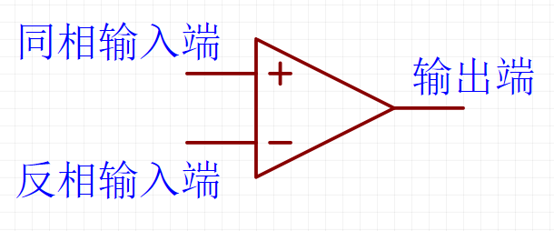
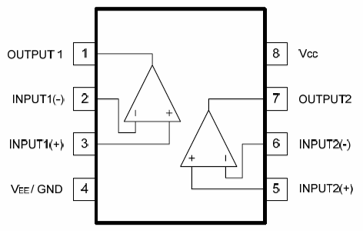
4.运算放大器
运算放大器(简称“运放”)是具有很高放大倍数的放大电路单元。内部集成了差分放大器、电压放大器、功率放大器三级放大电路,是一个性能完备、功能强大的通用放大电路单元,由于其应用十分广泛,现已作为基本的电路元件出现在电路图中
运算放大器可构成的电路有:电压比较器、反相放大器、同相放大器、电压跟随器、加法器、积分器、微分器等
运算放大器电路的分析方法:虚短、虚断(负反馈条件下)
虚短:在电路负反馈的状态下,负极电压等于正极电压;虚断:在负反馈电路中输入阻抗大的时候无法流入和流出
5.运放电路
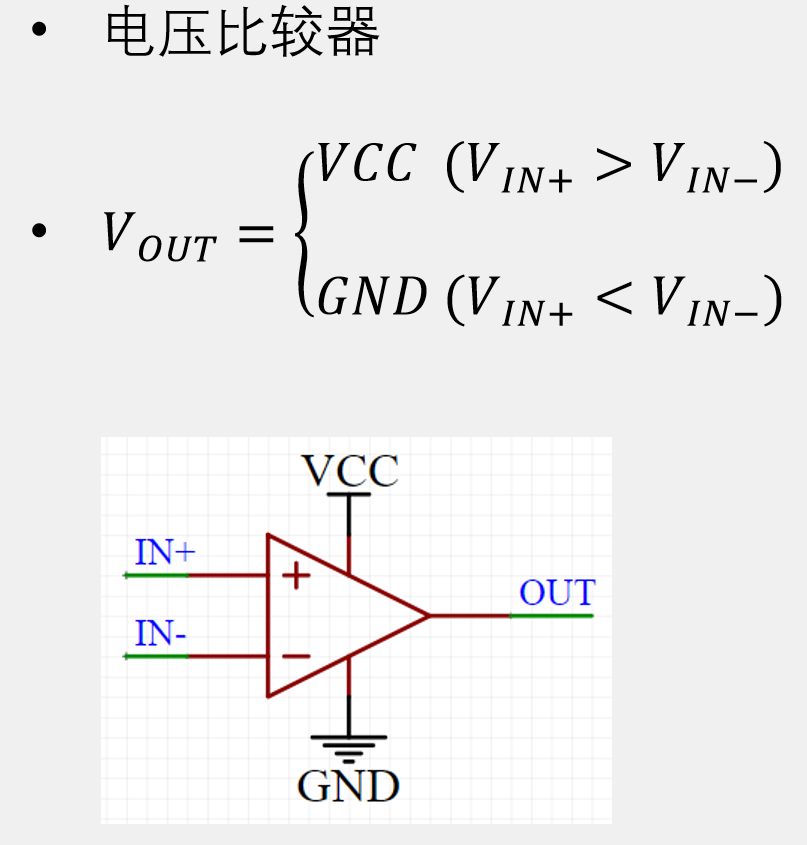
电压比较器
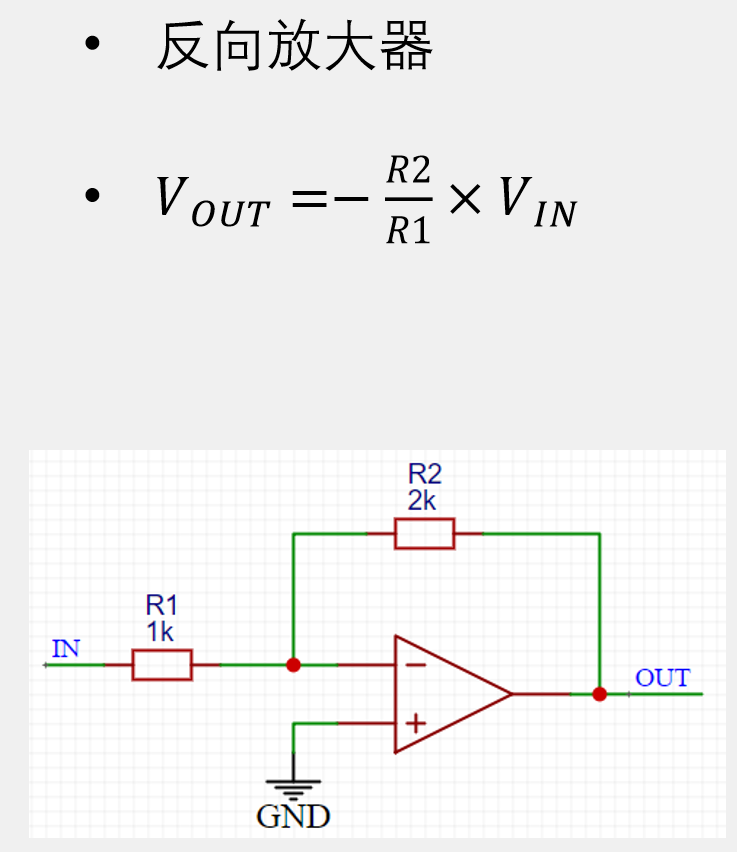
反向放大器:
负反馈电路性质:V负>V正→VOUT=负,VOUT会负反馈V负,抑制,当V负=V正时,电路稳定了VOUT就停止反馈了。V负<V正→VOUT=正,VOUT一样会正反馈V负,同理。
公式的推导:因为这个电路是负反馈的,有虚短的性质,运算放大器负极和正极都等于0V,输入VIN电压,电流等于VIN/R1,因为流入阻抗大,有虚断的性质,无法流入运算放大器,所以只能流过R2,所以电流R2等于R1的电流,R2的电压等于VIN/R1×R2,VOUT等于R2左边的节点-VIN/R1×R2,最后推导公式为-R2/R1×VIN。有时这个电路也不方便,因为需要双电源
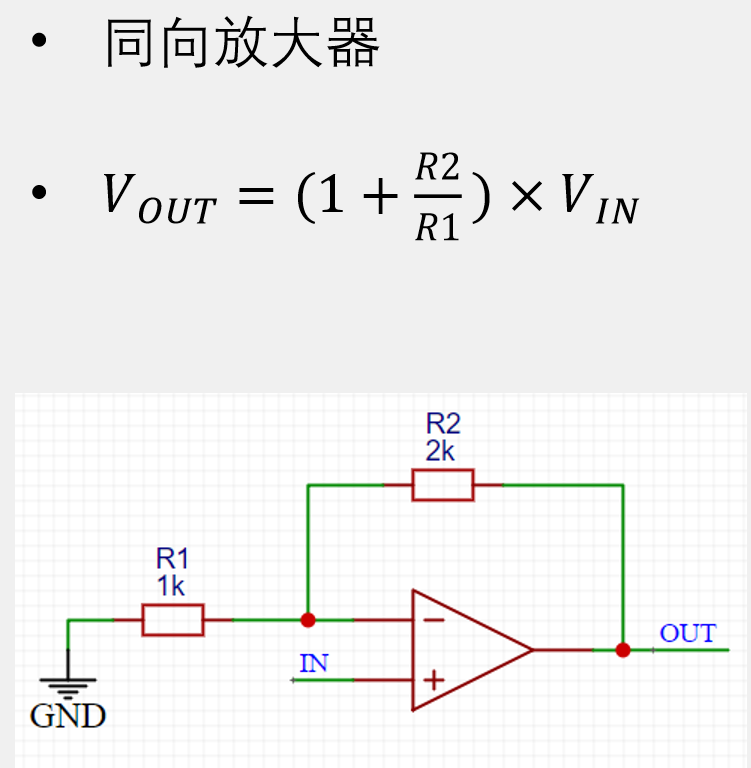
同向放大器:
因为这个电路也是负反馈电路,也拥有虚短和虚断的性质,因为虚短性质运算放大器的负极等于正极等于VIN,运算放大器的负极的电流会流向R1和R2,R2的电流为VIN/R1,因为R2的极性是右正左负,产生一个和R1相同的电流,这样VOUT等于VIN/R1×R2+VIN。会方便很多,不需要双电源
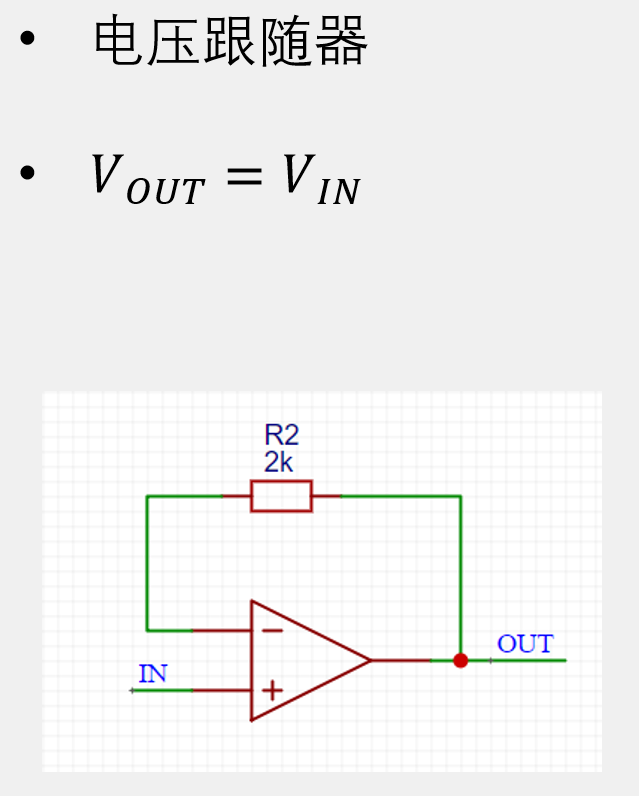
电压跟随器:
是同向放大器的一个变形,可以增加信号的驱动能力
6.DA原理
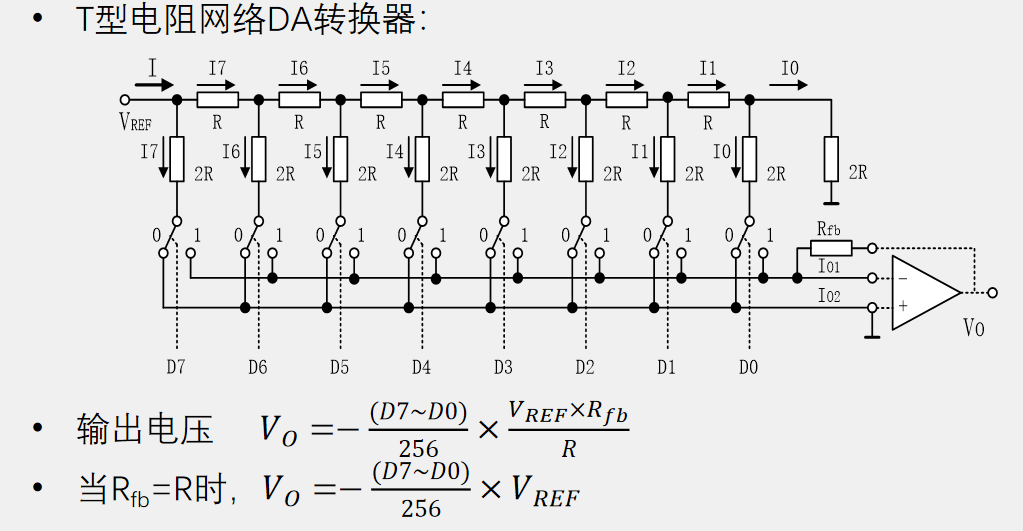
T型电阻网络DA转换器:
DAC0832中的8位D/A转换器的具体电路图。D7~D0给高电平,控制模拟开关的断开闭合;运算放大器处于一个负反馈电路,拥有虚短和虚断的性质,运算放大器正极接地,因为虚短负极电压为0,所以,两跟线电压为0;电路总电阻为R,电流关系:I1 = 2 I0, I2 = 2 I1……I7 = 2 I6 ---> Ix = 2^x I0,故而达到了二进制的位权的效果,所以有了下面的公式。I0 = 1/256*VREF/R ,当Rfb = R时,输入多少就输出多少
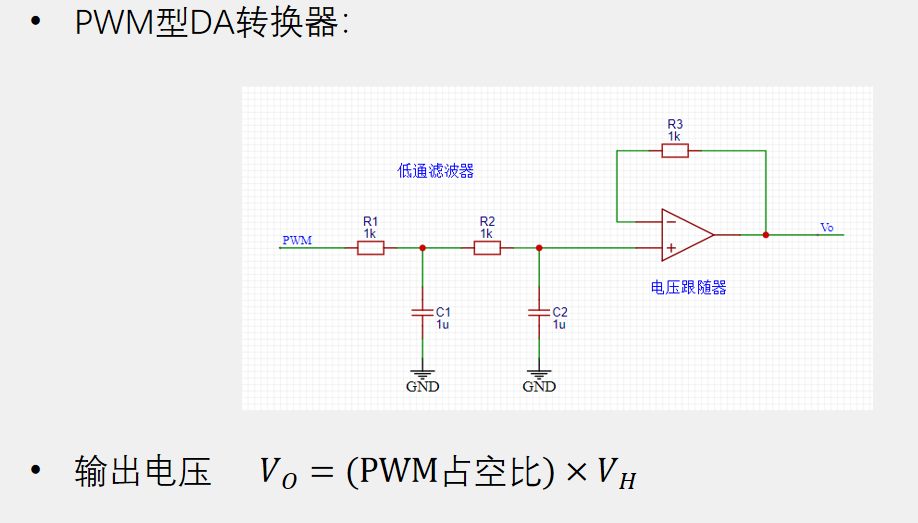
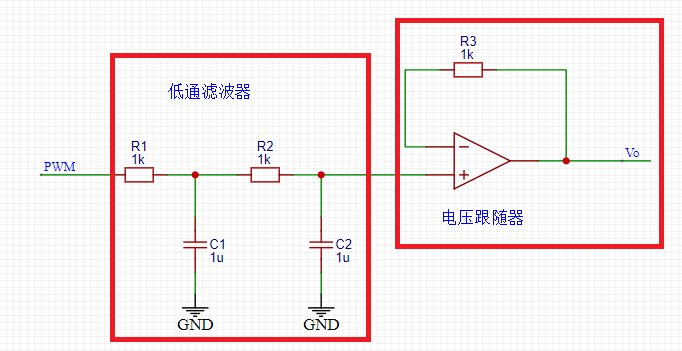
PWM型DA转换器:
低通滤波器用于过滤交流分量;电压跟随器用于增加信号的驱动能力;占空比:开始时间/总时间(开始时间+结束时间)
7.AD原理
AD大概思路:就是我不知道这个输入的电压的大小,就接一个已知的电压,与未知的电压进行比较,这样就间接的就用已知电压表示未知的电压
逐次逼近型AD转换器:
输出数字量 (D7~D0)=V_IN/V_REF×256 …… 结果取整
8.AD/DA性能指标
有很多这里只列举了两个,这两个比较常用
分辨率:
指AD/DA数字量的精细程度,通常用位数表示。例如,对于5V电源系统来说,8位的AD可将5V等分为256份,即数字量变化最小一个单位时,模拟量变化5V/256=0.01953125V,所以,8位AD的电压分辨率为0.01953125V,AD/DA的位数越高,分辨率就越高
转换速度:
表示AD/DA的最大采样/建立频率,通常用转换频率或者转换时间来表示,对于采样/输出高速信号,应注意AD/DA的转换速度
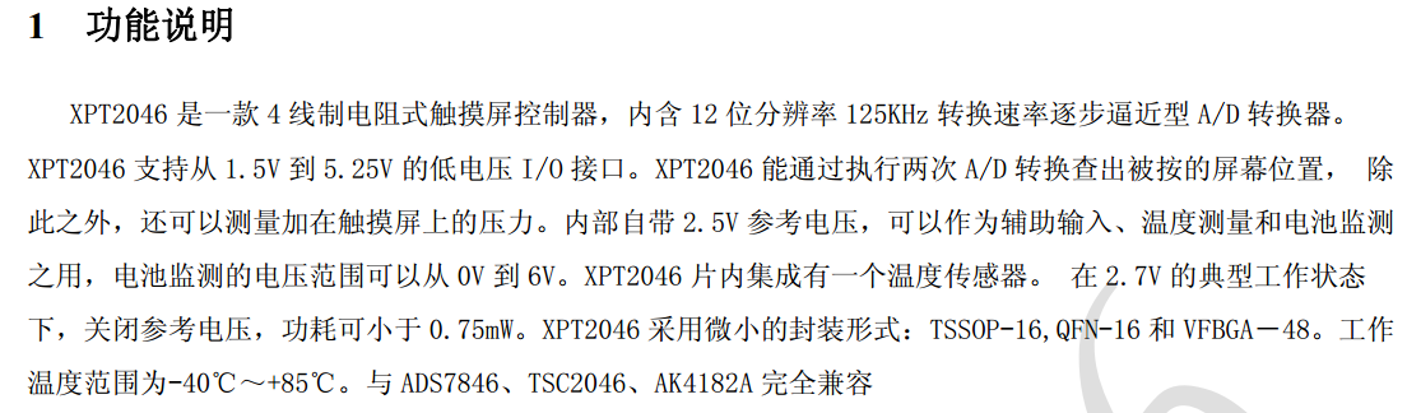
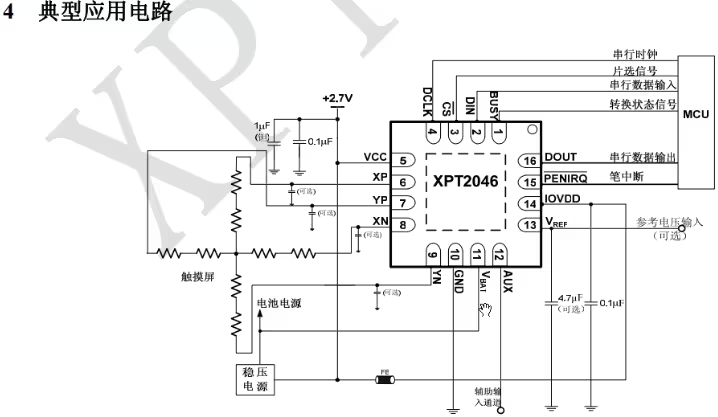
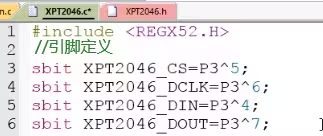
9.XPT2046
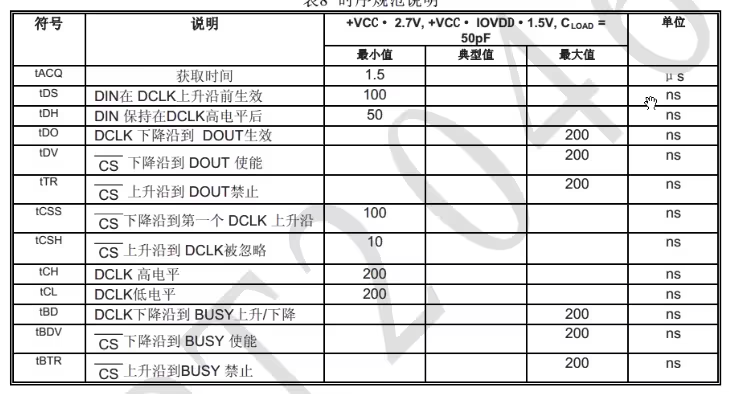
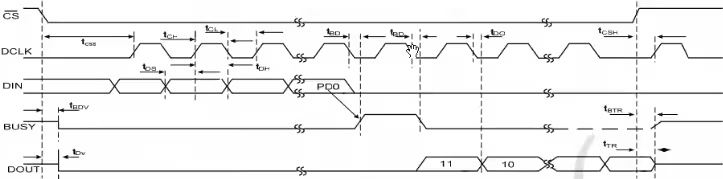
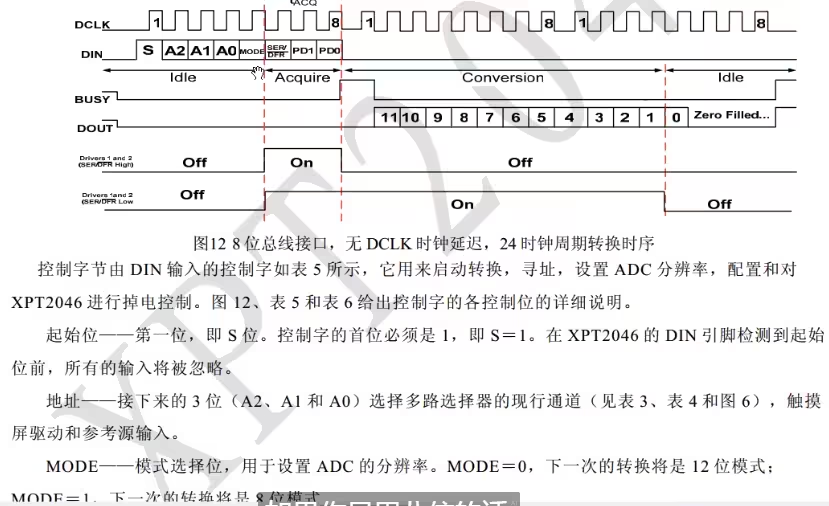
10.XPT2046时序
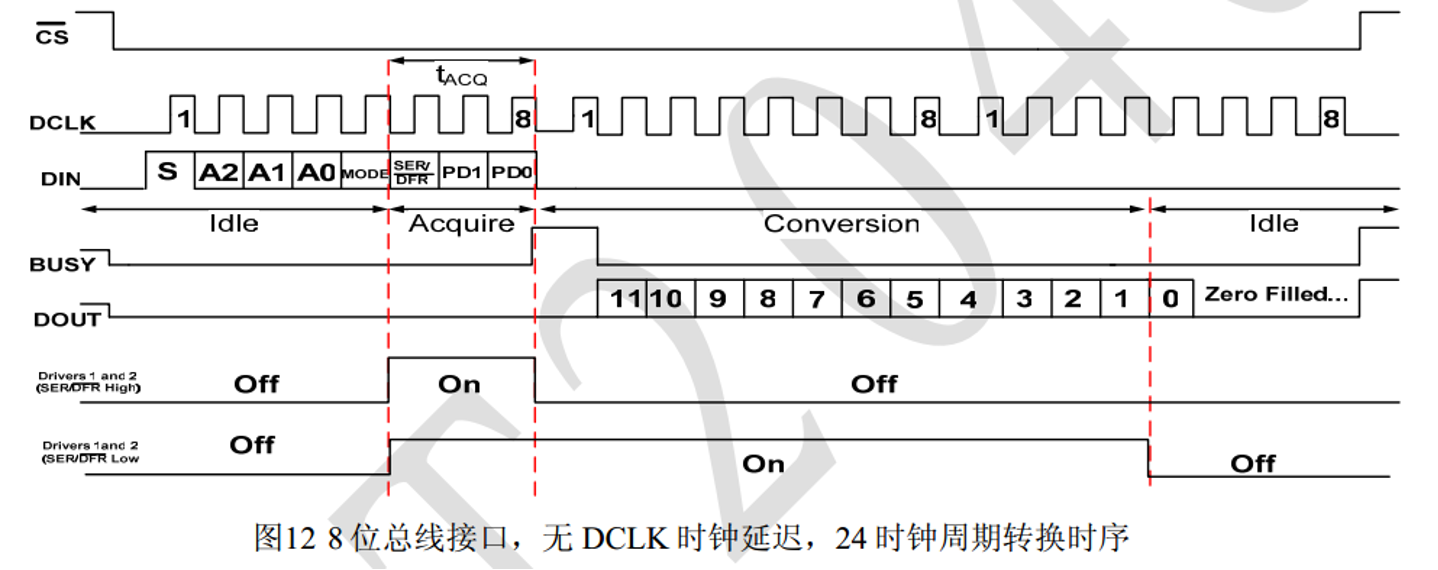
CS:片选、共用线:DCLK时钟、DIN输入、DOUT输出
11. AD模数转换代码(实现单片机内部电阻阻值可视化)
第一步:
把延时、液晶屏LCD模块复制粘贴到本工程
第二步:
建立XPT2046源文件和头文件
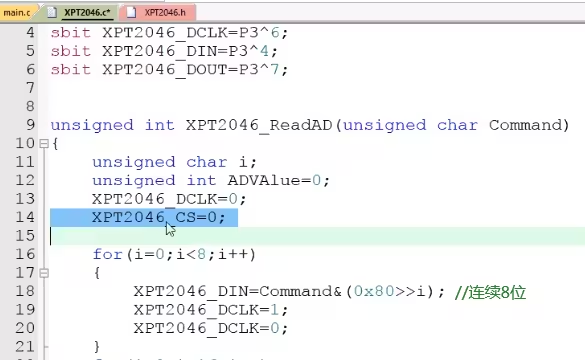
第三步:
接口引脚定义:CS\DCLK\DIN\DOUT
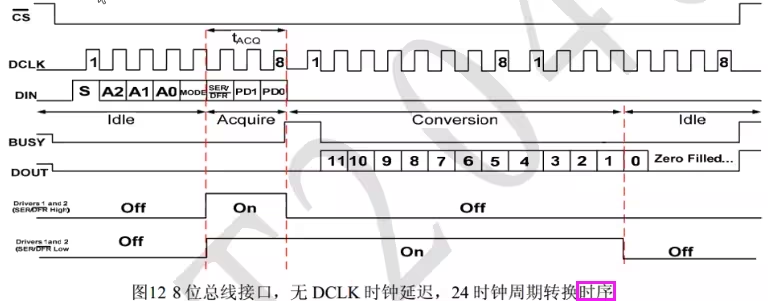
第四步:
根据上面时序在XPT2046.c写代码,不要管这么多内部的实现方法,因为已经集成了,直接用就可以了
第五步:
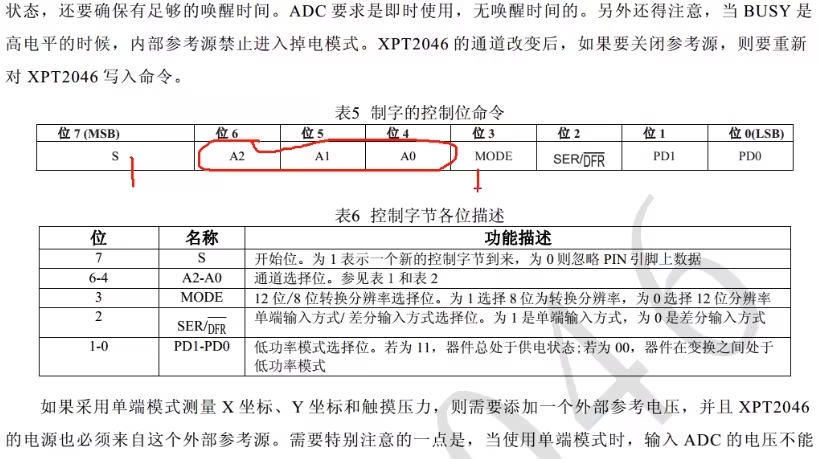
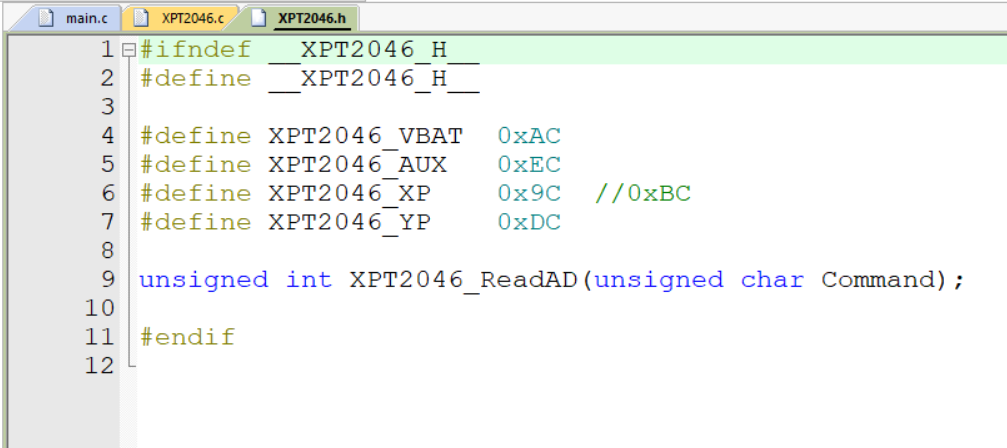
在XPT2046.h中根据单端模式输入配置中的各个通道进行宏定义

第六步:
主函数调用
最终代码:
模块:
XPT2046.c
#include <REGX52.H>
#include <INTRINS.H>
//引脚定义
sbit XPY2046_DIN=P3^4;
sbit XPY2046_CS=P3^5;
sbit XPY2046_DCLK=P3^6;
sbit XPY2046_DOUT=P3^7;
/**
* @brief ZPT2046读取AD值
* @param Command 命令字,范围:头文件内定义的宏,结尾的数字表示转换的位数
* @retval AD转换后的数字量,范围:8位为0~255,12位为0~4095
*/
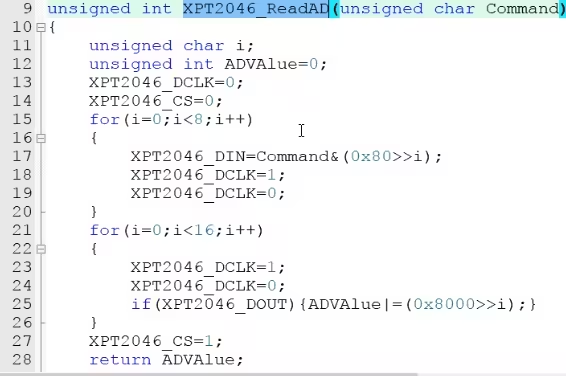
unsigned int XPT2046_ReadAD(unsigned char Command)
{
unsigned char i;
unsigned int Data=0;
XPY2046_DCLK=0;
XPY2046_CS=0;
for(i=0;i<8;i++)
{
XPY2046_DIN=Command&(0x80>>i);
XPY2046_DCLK=1;
XPY2046_DCLK=0;
}
for(i=0;i<16;i++)
{
XPY2046_DCLK=1;
XPY2046_DCLK=0;
if(XPY2046_DOUT){Data|=(0x8000>>i);}
}
XPY2046_CS=1;
return Data>>8;
}XPT2046.h
#ifndef __XPT2046_H__
#define __XPT2046_H__
#define XPT2046_VBAT 0xAC
#define XPT2046_AUX 0xEC
#define XPT2046_XP 0x9C //0xBC
#define XPT2046_YP 0xDC
unsigned int XPT2046_ReadAD(unsigned char Command);
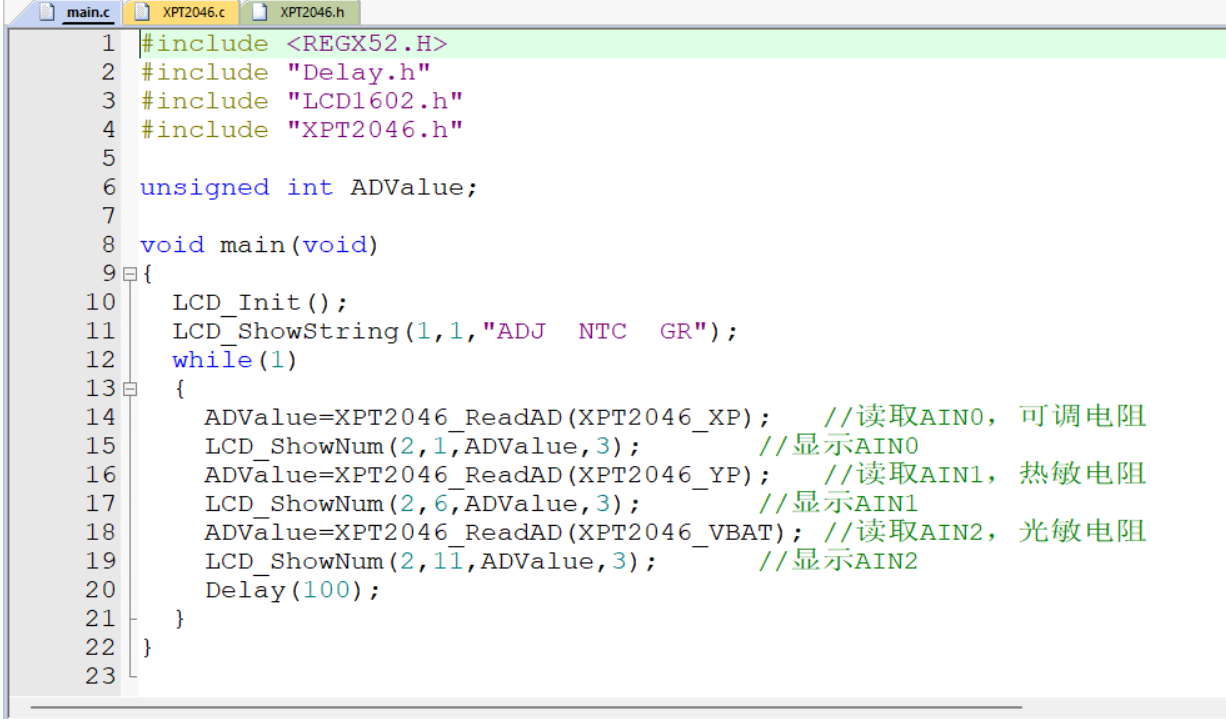
#endifmain.c
#include <REGX52.H>
#include "Delay.h"
#include "LCD1602.h"
#include "XPT2046.h"
unsigned int ADValue;
void main(void)
{
LCD_Init();
LCD_ShowString(1,1,"ADJ NTC GR");
while(1)
{
ADValue=XPT2046_ReadAD(XPT2046_XP); //读取AIN0,可调电阻
LCD_ShowNum(2,1,ADValue,3); //显示AIN0
ADValue=XPT2046_ReadAD(XPT2046_YP); //读取AIN1,热敏电阻
LCD_ShowNum(2,6,ADValue,3); //显示AIN1
ADValue=XPT2046_ReadAD(XPT2046_VBAT); //读取AIN2,光敏电阻
LCD_ShowNum(2,11,ADValue,3); //显示AIN2
Delay(100);
}
}12.DA数模转换代码
因为DA数模转换的原理就是PWM,只是多了一个低通滤波,所以我们直接把直流电机调速的工程直接复制,直流电机调速的代码在小编的51单片机直流电机实验中
第一步:
更改I/O的定义
![]()
第二步:
改名字,在主函数里面将代码中Motor改成DA
第三步:
将按键和数码管模块删除,在主函数里面讲按键和数码管相关代码删除
第四步:
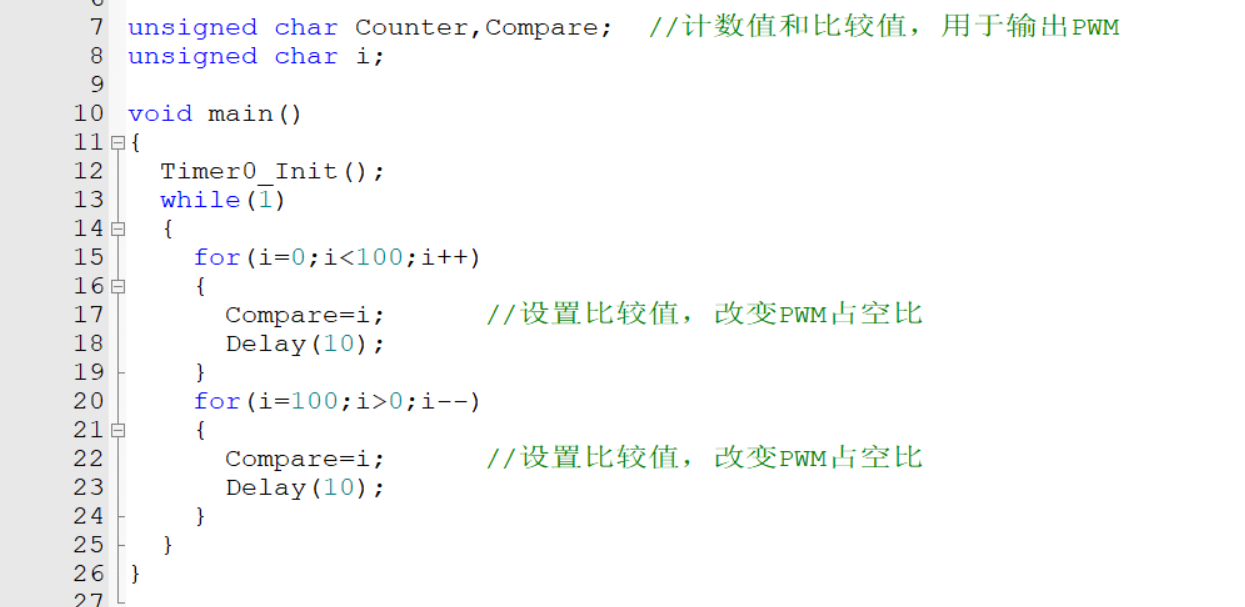
修改主函数
最终代码:
模块:
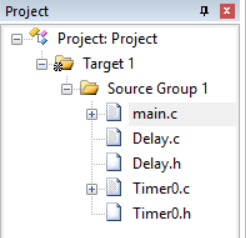
main.c
#include <REGX52.H>
#include "Delay.h"
#include "Timer0.h"
sbit DA=P2^1;
unsigned char Counter,Compare; //计数值和比较值,用于输出PWM
unsigned char i;
void main()
{
Timer0_Init();
while(1)
{
for(i=0;i<100;i++)
{
Compare=i; //设置比较值,改变PWM占空比
Delay(10);
}
for(i=100;i>0;i--)
{
Compare=i; //设置比较值,改变PWM占空比
Delay(10);
}
}
}
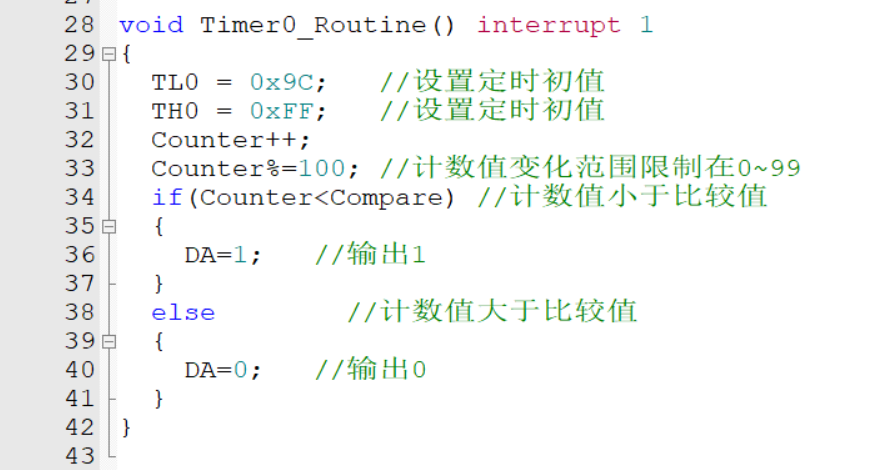
void Timer0_Routine() interrupt 1
{
TL0 = 0x9C; //设置定时初值
TH0 = 0xFF; //设置定时初值
Counter++;
Counter%=100; //计数值变化范围限制在0~99
if(Counter<Compare) //计数值小于比较值
{
DA=1; //输出1
}
else //计数值大于比较值
{
DA=0; //输出0
}
}
智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 41
41 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)