ARM嵌入式设备介绍及应用
DRM(Direct Rendering Manager)是现代Linux系统中用于管理图形硬件的内核子系统,相比传统的帧缓冲(fbdev)提供:更高效的显存管理多显示支持硬件加速功能原子提交模式。
ARM嵌入式设备详解
ARM架构概述
ARM(Advanced RISC Machine)是一种精简指令集计算机(RISC)架构,由英国ARM公司设计。其核心优势在于高效能、低功耗和可扩展性,使其成为嵌入式系统领域的首选架构。
ARM架构演进
| 架构版本 | 推出时间 | 主要特点 |
|---|---|---|
| ARMv4 | 1996年 | 首次支持Thumb指令集 |
| ARMv5 | 2001年 | 增强DSP指令,改进内存管理 |
| ARMv6 | 2002年 | SIMD指令集,多核支持 |
| ARMv7 | 2005年 | 引入Cortex系列,NEON技术 |
| ARMv8 | 2011年 | 64位架构,增强安全性 |
| ARMv9 | 2021年 | AI加速,增强安全性 |
ARM嵌入式设备核心特点
1. 能效优化
-
采用精简指令集(RISC)设计
-
多级功耗管理(运行/空闲/睡眠/关机)
-
动态电压频率调整(DVFS)技术
-
功耗低至微瓦级别(如Cortex-M0+)
2. 多样化产品线
-
Cortex-M系列:微控制器级(IoT设备、传感器)
-
Cortex-R系列:实时处理器(汽车ECU、工业控制)
-
Cortex-A系列:应用处理器(智能手机、平板)
-
Ethos NPU:神经网络处理器(AI边缘计算)
3. 丰富的外设接口
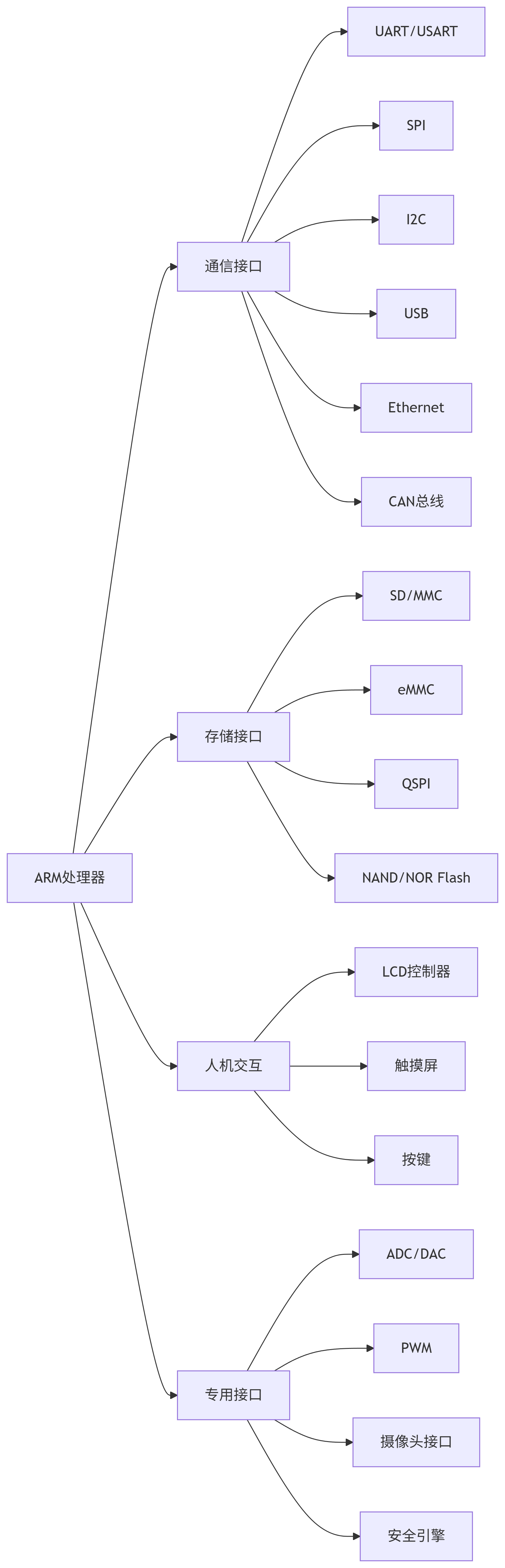
ARM处理器
通信接口
存储接口
人机交互
专用接口
UART/USART
SPI
I2C
USB
Ethernet
CAN总线
SD/MMC
eMMC
QSPI
NAND/NOR Flash
LCD控制器
触摸屏
按键
ADC/DAC
PWM
摄像头接口
安全引擎
4. 实时性能
-
确定性中断响应(低延迟)
-
内存保护单元(MPU)
-
支持实时操作系统(RTOS)
-
硬件级任务调度
5. 开发生态系统
-
开发工具:Keil MDK, IAR EWARM, GCC ARM
-
操作系统:FreeRTOS, Zephyr, ARM Mbed OS, Linux
-
调试接口:JTAG, SWD, ETM
-
开发板:STM32 Discovery, Raspberry Pi, NXP EVK
ARM嵌入式显示技术
显示接口类型
-
RGB接口:并行接口,用于中小尺寸屏幕
-
MIPI DSI:高速串行接口,用于移动设备
-
LVDS:低压差分信号,用于大尺寸屏幕
-
HDMI:高清多媒体接口
-
eDP:嵌入式DisplayPort
显示控制器特性
-
多层合成(Alpha混合)
-
硬件光标支持
-
色彩空间转换(RGB/YUV)
-
旋转和镜像功能
-
伽马校正
基于DRM框架的高清显示代码示例
#include <stdio.h>
#include <fcntl.h>
#include <unistd.h>
#include <xf86drm.h>
#include <xf86drmMode.h>
#define DRM_DEVICE "/dev/dri/card0"
int main() {
int drm_fd;
drmModeRes *resources;
drmModeConnector *connector = NULL;
drmModeEncoder *encoder = NULL;
drmModeCrtc *crtc = NULL;
// 打开DRM设备
drm_fd = open(DRM_DEVICE, O_RDWR);
if (drm_fd < 0) {
perror("Failed to open DRM device");
return -1;
}
// 获取资源列表
resources = drmModeGetResources(drm_fd);
if (!resources) {
perror("Failed to get DRM resources");
close(drm_fd);
return -1;
}
// 查找第一个连接的显示器
for (int i = 0; i < resources->count_connectors; i++) {
connector = drmModeGetConnector(drm_fd, resources->connectors[i]);
if (connector->connection == DRM_MODE_CONNECTED) {
break;
}
drmModeFreeConnector(connector);
connector = NULL;
}
if (!connector) {
fprintf(stderr, "No active connector found\n");
drmModeFreeResources(resources);
close(drm_fd);
return -1;
}
// 查找编码器
encoder = drmModeGetEncoder(drm_fd, connector->encoder_id);
if (!encoder) {
perror("Failed to get encoder");
drmModeFreeConnector(connector);
drmModeFreeResources(resources);
close(drm_fd);
return -1;
}
// 获取当前CRTC
crtc = drmModeGetCrtc(drm_fd, encoder->crtc_id);
if (!crtc) {
perror("Failed to get CRTC");
drmModeFreeEncoder(encoder);
drmModeFreeConnector(connector);
drmModeFreeResources(resources);
close(drm_fd);
return -1;
}
printf("Display connected: %dx%d@%dHz\n",
crtc->mode.hdisplay, crtc->mode.vdisplay,
crtc->mode.vrefresh);
// 创建帧缓冲区(实际应用中需分配内存)
uint32_t fb_id;
struct drm_mode_create_dumb create_req = {
.width = crtc->mode.hdisplay,
.height = crtc->mode.vdisplay,
.bpp = 32
};
if (drmIoctl(drm_fd, DRM_IOCTL_MODE_CREATE_DUMB, &create_req)) {
perror("Failed to create dumb buffer");
goto cleanup;
}
// 创建帧缓冲区对象
if (drmModeAddFB(drm_fd, create_req.width, create_req.height,
24, 32, create_req.pitch, create_req.handle, &fb_id)) {
perror("Failed to add framebuffer");
goto cleanup_dumb;
}
// 设置CRTC
if (drmModeSetCrtc(drm_fd, crtc->crtc_id, fb_id,
0, 0, &connector->connector_id, 1, &crtc->mode)) {
perror("Failed to set CRTC");
goto cleanup_fb;
}
printf("Display initialized successfully\n");
// 实际应用中在此处进行图形渲染
// ...
// 资源清理
cleanup_fb:
drmModeRmFB(drm_fd, fb_id);
cleanup_dumb:
struct drm_mode_destroy_dumb destroy_req = { .handle = create_req.handle };
drmIoctl(drm_fd, DRM_IOCTL_MODE_DESTROY_DUMB, &destroy_req);
cleanup:
drmModeFreeCrtc(crtc);
drmModeFreeEncoder(encoder);
drmModeFreeConnector(connector);
drmModeFreeResources(resources);
close(drm_fd);
return 0;
}代码说明
1. DRM框架介绍
DRM(Direct Rendering Manager)是现代Linux系统中用于管理图形硬件的内核子系统,相比传统的帧缓冲(fbdev)提供:
-
更高效的显存管理
-
多显示支持
-
硬件加速功能
-
原子提交模式
2. 关键操作步骤
-
打开DRM设备文件
-
获取可用资源(连接器、编码器、CRTC)
-
创建显示缓冲区(dumb buffer)
-
注册帧缓冲区
-
设置CRTC(显示控制器)
-
渲染图形内容(示例中省略)
-
资源清理
3. 实际应用扩展
-
使用libdrm库简化开发
-
实现双缓冲避免画面撕裂
-
添加VSync同步机制
-
集成OpenGL ES进行3D渲染
-
使用Wayland或X11显示服务器
典型应用场景
工业控制
-
人机界面(HMI)系统
-
实时监控显示屏
-
设备控制面板
智能家居
-
智能中控触摸屏
-
安防监控显示
-
家电交互界面
汽车电子
-
数字仪表盘
-
车载信息娱乐系统
-
后座娱乐显示屏
医疗设备
-
病人监护显示屏
-
医疗影像显示
-
便携式诊断设备
开发建议
-
硬件选择:根据显示需求选择带GPU的Cortex-A系列处理器
-
软件栈:Linux + DRM + Wayland + Qt
-
优化技巧:
-
使用硬件覆盖层减少内存拷贝
-
启用DMA-BUF进行零拷贝传输
-
利用GPU进行图形加速
-
-
调试工具:
-
modetest(DRM测试工具) -
libdrm测试程序 -
perf性能分析工具
-
ARM嵌入式设备凭借其出色的能效比、强大的多媒体处理能力和丰富的生态系统,已成为高清显示应用的理想平台。随着AIoT技术的发展,ARM在嵌入式显示领域的优势将进一步扩大。
ARM生态系统架构

ARM生态系统
处理器IP
物理IP
软件工具
开发社区
Cortex-M 微控制器
Cortex-R 实时处理器
Cortex-A 应用处理器
Neoverse 基础设施
Ethos NPU
GPU Mali系列
互连技术
系统控制器
Keil MDK
DS-5
ARM GCC
ARM Development Studio
ARM社区
GitHub项目
开源硬件平台
全球市场份额分析
-
移动设备市场:95%占有率
-
嵌入式系统:78%占有率
-
物联网设备:85%占有率
-
汽车电子:65%占有率
-
工业控制:70%占有率
二、ARM处理器核心深度解析
Cortex-M系列:嵌入式智能核心
架构特点:
-
32位RISC架构,时钟频率50-500MHz
-
超低功耗设计(< 10μA/MHz)
-
嵌套向量中断控制器(NVIC)
-
内存保护单元(MPU)
-
可选浮点单元(FPU)
典型产品:
-
Cortex-M0/M0+:成本敏感型应用,能效比高达2.5 CoreMark/μW
-
Cortex-M3:平衡性能与功耗,支持Thumb-2指令集
-
Cortex-M4:带DSP指令,适合数字信号处理
-
Cortex-M7:双发射超标量架构,性能达5 CoreMark/MHz
-
Cortex-M55:首款支持Armv8.1-M架构,集成Helium向量扩展
Cortex-R系列:实时控制王者
关键特性:
-
锁步核设计(安全关键应用)
-
低延迟外设接口(< 40ns)
-
错误纠正码(ECC)内存保护
-
高精度定时器(< 1ns分辨率)
应用场景:
-
汽车制动系统(响应时间<10ms)
-
工业PLC控制(抖动<100ns)
-
医疗生命维持设备
-
固态硬盘控制器
Cortex-A系列:应用处理器旗舰
技术演进:
| 世代 | 代表核心 | 制程工艺 | 性能提升 |
|---|---|---|---|
| A5 | Cortex-A5 | 40nm | 基础级应用 |
| A7 | Cortex-A7 | 28nm | 能效比提升40% |
| A53 | Cortex-A53 | 16/14nm | 64位革命 |
| A72 | Cortex-A72 | 10nm | 性能3.5倍于A15 |
| A78 | Cortex-A78 | 5nm | 能效提升50% |
| X1 | Cortex-X1 | 5nm | 峰值性能提升30% |
创新技术:
-
big.LITTLE异构计算
-
DynamIQ共享缓存架构
-
AMBA 5 CHI互连总线
-
内存标签扩展(MTE)安全技术
三、ARM嵌入式显示系统深度剖析
显示子系统架构
图表
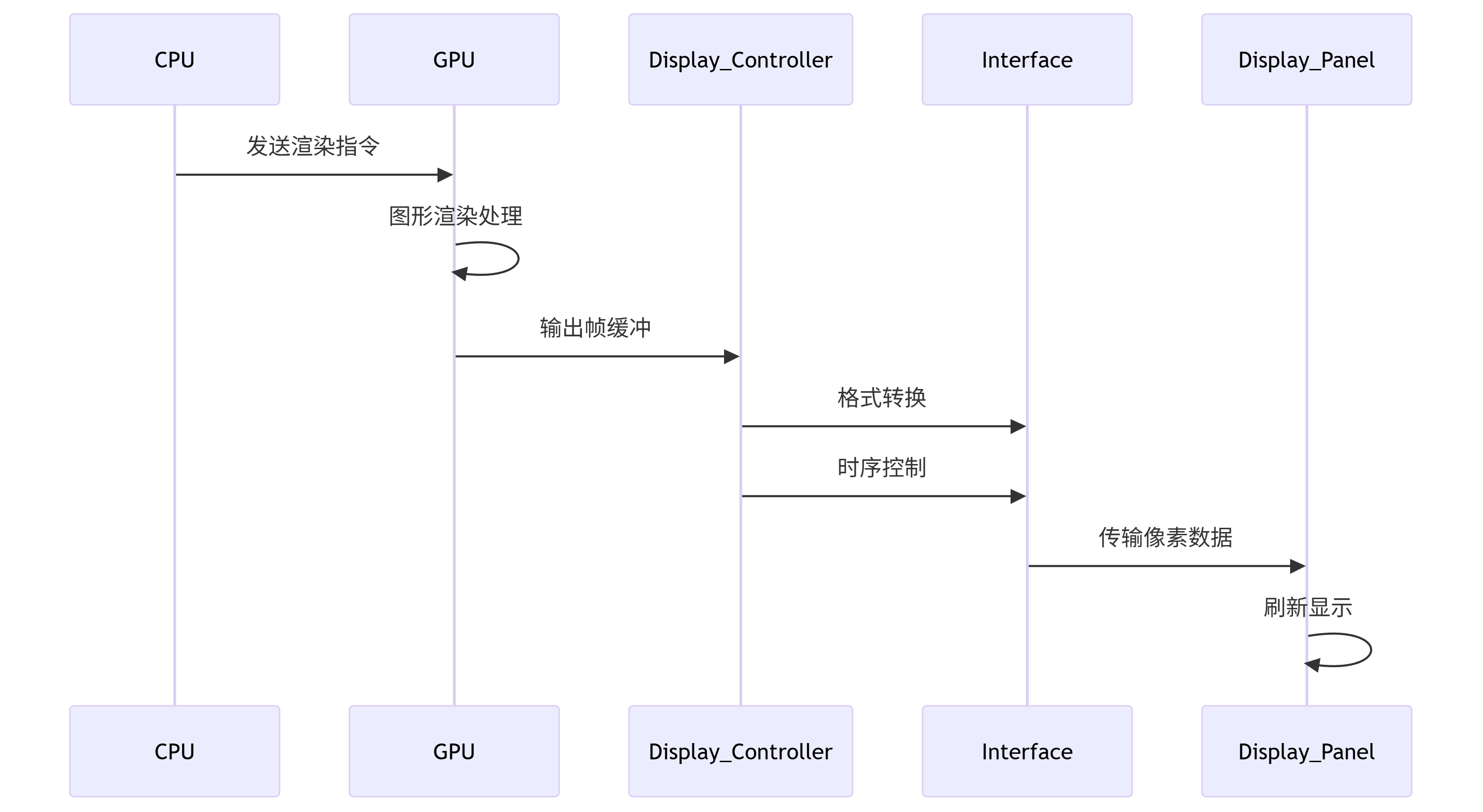
Display_PanelInterfaceDisplay_ControllerGPUCPUDisplay_PanelInterfaceDisplay_ControllerGPUCPU发送渲染指令图形渲染处理输出帧缓冲格式转换时序控制传输像素数据刷新显示
主流显示接口对比
| 接口类型 | 带宽 | 引脚数 | 传输距离 | 典型应用 |
|---|---|---|---|---|
| RGB 24-bit | 150MHz | 28+ | <30cm | 中小尺寸LCD |
| LVDS | 1.5Gbps | 4-8 | <5m | 工业面板 |
| MIPI DSI | 10Gbps | 4-8 | <20cm | 移动设备 |
| HDMI 2.0 | 18Gbps | 19 | <15m | 多媒体终端 |
| eDP 1.4 | 32.4Gbps | 4-8 | <1m | 高端嵌入式 |
| Parallel 8080 | 50MHz | 16+ | <20cm | 低成本屏 |
现代显示技术栈
Linux图形栈架构:
应用层 ├── Qt/Wayland应用 ├── GTK3/X11应用 └── OpenGL ES游戏 中间件层 ├── Wayland显示协议 ├── X Window System ├── Vulkan/OpenGL ES └── GStreamer多媒体 驱动层 ├── DRM/KMS核心 ├── GPU驱动(Mali/PVR/Vivante) ├── 显示控制器驱动 └── 触摸屏驱动 硬件层 ├── GPU ├── 显示控制器 ├── 接口PHY └:显示面板
四、工业级显示系统代码实现
基于Qt的工业HMI实现
#include <QApplication>
#include <QtWidgets>
#include <QtWaylandCompositor/QWaylandCompositor>
#include <QQuickView>
class IndustrialHMI : public QMainWindow {
public:
IndustrialHMI(QWidget *parent = nullptr) : QMainWindow(parent) {
// 创建主窗口
setWindowTitle("工业控制面板");
resize(1024, 600);
// 创建中央控件
QWidget *centralWidget = new QWidget(this);
setCentralWidget(centralWidget);
// 网格布局
QGridLayout *layout = new QGridLayout(centralWidget);
// 添加状态指示器
QLabel *tempLabel = createStatusIndicator("温度传感器", 45.2, "°C");
layout->addWidget(tempLabel, 0, 0);
QLabel *pressureLabel = createStatusIndicator("压力传感器", 102.4, "kPa");
layout->addWidget(pressureLabel, 0, 1);
// 添加控制按钮
QPushButton *startBtn = new QPushButton("启动生产线", this);
startBtn->setStyleSheet("background-color: #4CAF50; color: white; font-size: 20px;");
layout->addWidget(startBtn, 1, 0);
QPushButton *stopBtn = new QPushButton("紧急停止", this);
stopBtn->setStyleSheet("background-color: #F44336; color: white; font-size: 20px;");
layout->addWidget(stopBtn, 1, 1);
// 添加实时图表
QChartView *chartView = createRealTimeChart();
layout->addWidget(chartView, 2, 0, 1, 2);
// 连接信号
connect(startBtn, &QPushButton::clicked, this, &IndustrialHMI::startProduction);
connect(stopBtn, &QPushButton::clicked, this, &IndustrialHMI::emergencyStop);
}
private:
QLabel* createStatusIndicator(const QString& title, double value, const QString& unit) {
QLabel *label = new QLabel(this);
label->setAlignment(Qt::AlignCenter);
label->setStyleSheet("border: 2px solid #2196F3; border-radius: 10px; padding: 15px;");
QString text = QString("<b>%1</b><br>"
"<span style='font-size: 28pt; color: #FF5722;'>%2</span> "
"<span style='font-size: 18pt;'>%3</span>")
.arg(title).arg(value).arg(unit);
label->setText(text);
return label;
}
QChartView* createRealTimeChart() {
QChart *chart = new QChart();
chart->setTitle("生产线实时监控");
QLineSeries *series = new QLineSeries();
// 模拟数据
for (int i = 0; i < 100; ++i) {
series->append(i, qSin(i * 0.1) * 50 + 100);
}
chart->addSeries(series);
chart->createDefaultAxes();
chart->axisX()->setRange(0, 100);
chart->axisY()->setRange(50, 150);
return new QChartView(chart);
}
void startProduction() {
QMessageBox::information(this, "系统启动", "生产线启动中...");
}
void emergencyStop() {
QMessageBox::critical(this, "紧急停止", "生产线已紧急停止!");
}
};
int main(int argc, char *argv[]) {
// 嵌入式平台特殊配置
qputenv("QT_QPA_PLATFORM", "eglfs");
qputenv("QT_LOGGING_RULES", "qt.qpa.*=true");
qputenv("QT_QPA_EGLFS_HIDECURSOR", "1");
QApplication app(argc, argv);
IndustrialHMI hmi;
// 全屏显示
hmi.showFullScreen();
return app.exec();
}代码说明与优化技术
-
嵌入式Qt优化策略:
# 配置编译选项 ./configure -release -opengl es2 -device linux-arm-gnueabi-g++ \ -device-option CROSS_COMPILE=arm-linux-gnueabihf- \ -sysroot /opt/sysroot -prefix /usr/local/qt-embedded \ -no-gtk -no-xcb -no-cups -no-sql-odbc -qt-libjpeg \ -qt-libpng -system-freetype -no-openssl -no-pch # 裁剪无用模块 -skip qtwebengine -skip qtlocation -skip qtsensors -
渲染性能优化:
-
使用OpenGL ES硬件加速
-
启用Qt Quick 2D渲染器
-
应用图层合成技术
-
使用QML场景图优化
-
3.内存优化技术:
// 共享内存技术
QSharedMemory sharedMem("industrial_hmi");
sharedMem.create(1024*1024); // 1MB共享内存
// 零拷贝纹理
QImage image(buffer, width, height, QImage::Format_RGB32);
QQuickWindow::setGraphicsDevice(QQuickWindow::DeviceOwnership::TextureOwnsGLTexture);五、ARM嵌入式设备开发全流程
开发工具链
| 工具类型 | 开源方案 | 商业方案 | 适用场景 |
|---|---|---|---|
| IDE | VSCode + Cortex-Debug | Keil MDK | Cortex-M开发 |
| 编译器 | GCC ARM | IAR EWARM | 全系列支持 |
| 调试器 | OpenOCD | J-Link | 实时追踪 |
| 仿真器 | QEMU | ARM Fast Models | 架构验证 |
| 性能分析 | perf+FlameGraph | ARM Streamline | 系统优化 |
开发流程
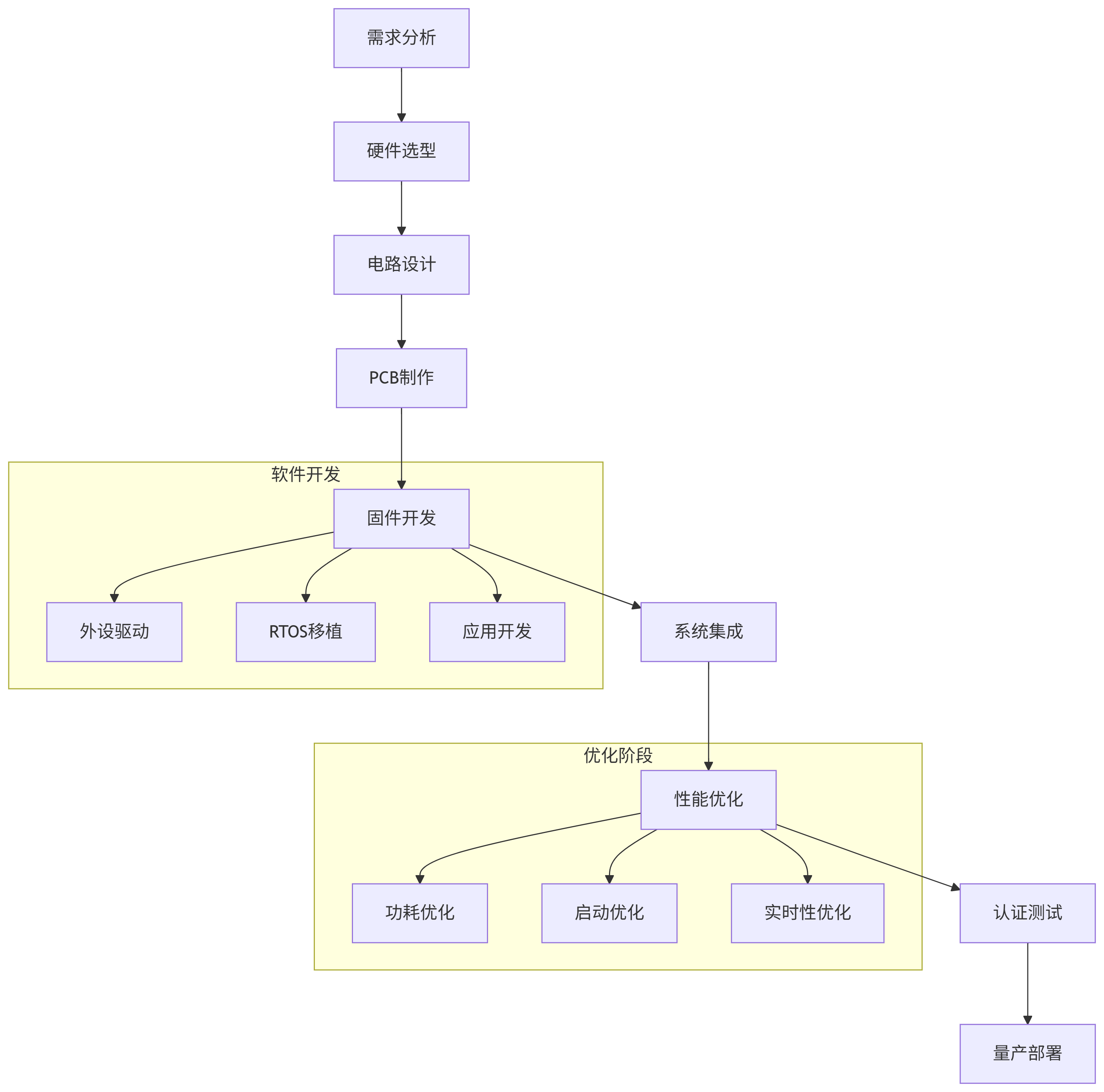
优化阶段
软件开发
需求分析
硬件选型
电路设计
PCB制作
固件开发
系统集成
性能优化
认证测试
量产部署
外设驱动
RTOS移植
应用开发
功耗优化
启动优化
实时性优化
关键调试技术
-
JTAG/SWD调试:
-
实时断点设置
-
内存/寄存器查看
-
指令追踪(ETM)
-

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 16
16 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)