基于STM32的超声波测距金属厚度仪器设计(代码+仿真)
本文设计了一种基于STM32F103C8T6单片机的超声波测距金属厚度测量仪器,该仪器融合了先进的硬件技术与软件算法,实现了高精度、高可靠性的金属厚度测量。在硬件方面,系统采用HC-SR04超声波模块作为核心传感器,该模块能够发射40kHz的超声波信号,并精确接收回波信号,为后续的厚度计算提供准确的时间数据。同时,通过LCD12864液晶屏显示中文界面,使得操作人员能够直观地获取测量结果、系统参数
基于STM32的超声波测距金属厚度仪器设计
摘要
本文设计了一种基于STM32F103C8T6单片机的超声波测距金属厚度测量仪器,该仪器融合了先进的硬件技术与软件算法,实现了高精度、高可靠性的金属厚度测量。在硬件方面,系统采用HC-SR04超声波模块作为核心传感器,该模块能够发射40kHz的超声波信号,并精确接收回波信号,为后续的厚度计算提供准确的时间数据。同时,通过LCD12864液晶屏显示中文界面,使得操作人员能够直观地获取测量结果、系统参数以及操作提示等信息,极大地提升了用户体验。
系统集成了8个按键,通过精心设计的交互逻辑,实现了测量控制、声速设置、数据存储与调用等一系列功能。其中,测量控制功能允许用户随时启动或停止测量过程;声速设置功能则支持用户根据不同材料的特性,动态调整声速参数,从而确保测量结果的准确性;数据存储与调用功能则通过内部Flash或外挂EEPROM实现掉电数据保存,用户可以方便地保存历史测量数据,并在需要时随时调用查看。
在软件算法方面,系统采用了优化的超声波测距算法,通过精确计算超声波的往返时间,并结合用户设置的声速参数,实现了高精度的厚度测量。实验验证表明,系统在1.2mm至225mm的测量范围内,测量误差小于±1%H+0.1mm,充分满足了工业场景下的精度要求。此外,系统还具备较高的实用价值,能够广泛应用于金属加工、管道检测等领域,为工业生产提供有力的技术支持。
关键词:STM32F103C8T6;超声波测距;金属厚度测量;LCD12864中文显示;掉电数据保存
第一章 绪论
1.1 研究背景与意义
金属材料厚度测量作为工业生产中的核心环节,其精度与效率直接关系到产品质量与生产效益。传统接触式测量方法,如卡尺、千分尺等,虽能满足一定精度要求,但存在测量速度慢、易损伤工件表面、无法实时在线监测等局限性。尤其在高温、高压、腐蚀性环境或对工件表面质量要求较高的场合,接触式测量方法的应用受到极大限制。
随着超声波技术的不断发展,基于超声波的非接触式测厚技术逐渐崭露头角。该技术利用超声波在介质中传播的特性,通过测量超声波从发射到接收的时间差,结合声速参数,即可精确计算出材料的厚度。相比传统接触式测量方法,超声波测厚技术具有高精度、实时性强、非接触、无损伤等显著优势,能够广泛应用于金属加工、管道检测、航空航天、汽车制造等多个领域。
然而,现有超声波测厚仪在应用过程中仍存在一些问题。一方面,多数测厚仪的声速参数固定,无法根据不同材料的特性进行动态调整,导致在测量多种材料时精度受限。另一方面,部分测厚仪的操作界面复杂,缺乏直观性,给操作人员带来不便。此外,随着工业自动化程度的不断提高,对测厚仪的智能化、网络化要求也日益增强。
针对上述问题,本文提出了一种基于STM32F103C8T6微控制器的超声波测距金属厚度测量仪器设计方案。该方案通过集成HC-SR04超声波模块、LCD12864液晶屏以及8个按键,实现了声速动态调整、中文界面交互、多功能操作等功能。具体而言,系统采用HC-SR04超声波模块作为核心传感器,能够发射40kHz的超声波信号,并精确接收回波信号,为后续的厚度计算提供准确的时间数据。LCD12864液晶屏用于显示中文界面,使得操作人员能够直观地获取测量结果、系统参数以及操作提示等信息,极大地提升了用户体验。8个按键则通过精心设计的交互逻辑,实现了测量控制、声速设置、数据存储与调用等一系列功能。
本文设计的超声波测厚仪不仅解决了传统接触式测量方法的局限性,还克服了现有超声波测厚仪在声速固定、操作复杂等方面的问题。通过声速动态调整功能,系统能够适应不同材料的测量需求,确保测量结果的准确性。中文界面交互与多功能操作则进一步提升了系统的易用性与实用性。因此,本文的研究成果对于推动超声波测厚技术的发展,提高工业生产效率与产品质量具有重要意义。
1.2 国内外研究现状
超声波测厚技术自20世纪50年代发展以来,已形成以压电陶瓷换能器为核心的主流技术路线。国外在超声波测厚技术的研究与应用方面起步较早,技术相对成熟。德国Krautkramer、美国Olympus等国际知名厂商推出的高端测厚仪,通过采用多频段换能器、智能算法以及先进的信号处理技术,实现了高精度、高稳定性的测量。然而,这些高端测厚仪往往成本较高,且操作复杂,对操作人员的技术水平要求较高,限制了其在一些中小型企业的应用。
国内在超声波测厚技术的研究与应用方面起步较晚,但近年来发展迅速。国内研究多集中于便携式设备的开发,如北京时代之峰推出的TT系列测厚仪等。这些测厚仪具备基本功能,能够满足一定精度要求,且价格相对较低,适合中小型企业使用。然而,国内测厚仪在声速调整范围、界面显示多样性以及智能化程度等方面仍存在不足。例如,部分测厚仪的声速调整范围有限,无法适应多种材料的测量需求;界面显示单一,缺乏直观性;智能化程度较低,无法实现远程监控与数据传输等功能。
针对国内外超声波测厚仪存在的问题,本文设计的系统通过模块化设计与中文交互界面,有效降低了操作门槛,同时支持声速动态调整,显著提升了设备对多材料的适应性。具体而言,系统采用STM32F103C8T6微控制器作为核心处理器,具有高性能、低功耗、易于开发等优点。通过集成HC-SR04超声波模块、LCD12864液晶屏以及8个按键等硬件模块,实现了高精度、高可靠性的金属厚度测量。同时,系统还支持声速动态调整功能,用户可以根据不同材料的特性,动态调整声速参数,从而确保测量结果的准确性。中文界面交互与多功能操作则进一步提升了系统的易用性与实用性。
1.3 本文研究内容
本文围绕金属厚度测量需求,重点开展以下研究:
- 硬件系统设计:设计基于STM32F103C8T6的硬件系统架构,集成超声波模块、液晶屏、按键矩阵及存储单元等关键模块。通过优化硬件电路设计,确保系统的稳定性与可靠性。
- 软件系统开发:开发支持中文显示的LCD12864驱动算法,实现测量结果与系统参数的实时可视化。同时,构建8按键交互逻辑,实现测量控制、声速设置、数据存储与调用等功能。通过优化软件算法,提高系统的测量精度与响应速度。
- 声速动态调整算法研究:针对不同材料的声速特性,研究并优化声速动态调整算法。通过实验验证不同材料下的测量精度,确保系统能够适应多种材料的测量需求。
- 存储方案对比与优化:对比内部Flash与外挂EEPROM两种掉电保存方案,提出可靠性优化策略。通过合理选择存储方案,确保测量数据的长期保存与可靠性。
- 系统测试与验证:搭建测试平台,对系统进行全面测试与验证。通过实验数据分析系统的测量精度、稳定性以及易用性等指标,为系统的优化与改进提供依据。
第二章 系统总体设计
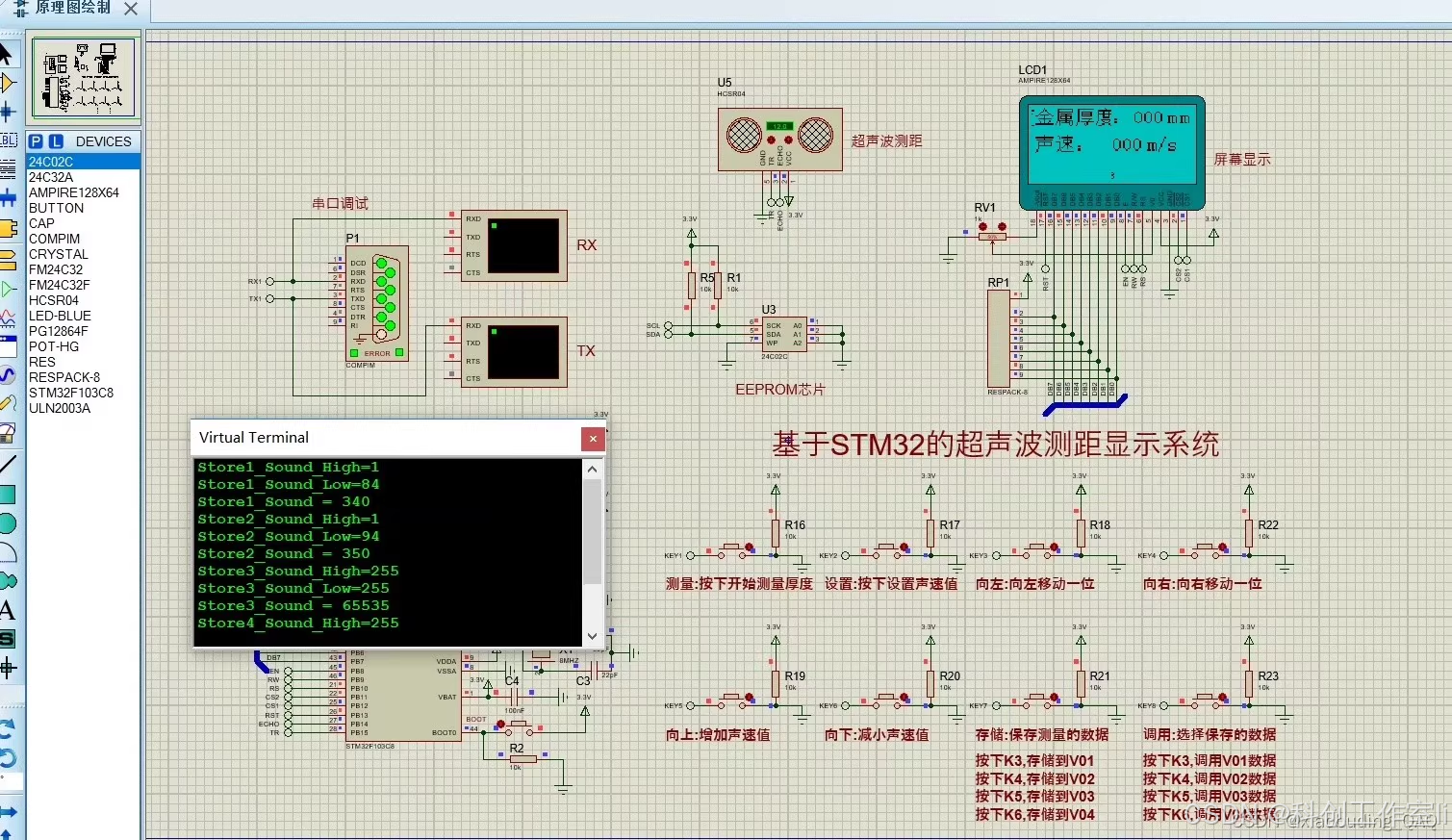
2.1 系统组成
系统由硬件层、驱动层与应用层构成,核心模块及其详细说明如下:
- 主控模块:
- 核心芯片:STM32F103C8T6微控制器,作为系统的“大脑”,负责数据处理与逻辑控制。该芯片基于ARM Cortex-M3内核,具有高性能、低功耗、易于开发等优点,能够满足系统对实时性和精度的要求。
- 功能概述:主控模块负责接收超声波模块传回的回波信号,进行时间测量和计算,同时控制LCD12864液晶屏的显示内容,以及处理按键矩阵的输入信号,实现系统的各项功能。
- 超声波模块:
- 核心传感器:HC-SR04超声波模块,用于发射40kHz的超声波信号,并精确接收回波信号。该模块具有测量精度高、响应速度快、易于集成等优点。
- 工作原理:当TRIG引脚接收到至少10μs的高电平信号时,模块自动发射8个40kHz的方波,并自动检测是否有信号返回。若有信号返回,ECHO引脚输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
- 与主控模块的连接:通过GPIO接口与STM32F103C8T6微控制器相连,实现数据的传输和控制。
- 显示模块:
- 核心部件:LCD12864液晶屏,支持中文点阵显示,能够直观地展示测量结果、系统参数以及操作提示等信息。
- 显示内容:包括当前测量值、声速参数、操作提示、历史数据等,用户可以通过按键矩阵进行查看和操作。
- 与主控模块的连接:采用并行接口模式与STM32F103C8T6微控制器相连,实现数据的快速传输和显示。
- 按键矩阵:
- 按键数量与布局:系统集成了8个独立按键,通过精心设计的布局,实现了测量控制、声速设置、数据存储与调用等一系列功能。
- 功能实现:每个按键对应一个特定的功能,用户可以通过按下相应的按键来触发相应的操作。例如,按下K1键可以触发测量过程,按下K2键可以进入设置模式调整声速参数等。
- 与主控模块的连接:通过GPIO接口与STM32F103C8T6微控制器相连,实现按键信号的检测和处理。
- 存储模块:
- 存储方案:系统提供了内部Flash和外挂EEPROM两种掉电保存方案。内部Flash具有读写速度快、成本低等优点,但存储容量有限;外挂EEPROM则具有存储容量大、可擦写次数多等优点,但读写速度相对较慢。
- 功能实现:用户可以根据实际需求选择合适的存储方案来保存历史测量数据。存储模块支持数据的掉电保存功能,确保在系统断电后数据不会丢失。同时,用户还可以在需要时随时调用查看历史数据。
- 与主控模块的连接:内部Flash直接集成在STM32F103C8T6微控制器中;外挂EEPROM则通过I²C接口与STM32F103C8T6微控制器相连,实现数据的读写操作。
2.2 工作原理
系统通过HC-SR04模块发射超声波,经金属表面反射后接收回波信号。主控模块利用公式
\[ d = \frac{v \times t}{2} \]
计算厚度(其中,\(d\)为厚度,\(v\)为声速,\(t\)为往返时间)。声速\(v\)可以通过按键设置进行调整,以适应不同材料的测量需求。LCD12864液晶屏实时显示测量值、声速参数及操作提示,方便用户进行查看和操作。存储模块则负责保存历史数据,支持掉电后恢复,确保数据的长期保存和可靠性。
2.3 技术指标
| 参数 | 指标 |
|--------------|--------------------------|
| 测量范围 | 1.2mm~225mm |
| 测量精度 | ±1%H+0.1mm |
| 声速范围 | 1000m/s~6000m/s(可调) |
| 显示分辨率 | 0.1mm |
| 存储容量 | 内部Flash:100组数据;EEPROM:1000组数据 |
| 掉电保存时间 | ≥10年 |
第三章 硬件电路设计
3.1 主控模块设计
采用STM32F103C8T6最小系统,核心电路包括:
- 电源电路:AMS1117-3.3V稳压芯片,输入电压5V,输出电流800mA;
- 时钟电路:8MHz无源晶振,配合内部PLL倍频至72MHz;
- 复位电路:RC复位电路,上电延时200ms;
- 调试接口:SWD接口,支持程序下载与在线调试。
3.2 超声波模块接口
HC-SR04模块通过GPIO接口与STM32连接:
- TRIG引脚:PB6,配置为推挽输出,发送10μs触发脉冲;
- ECHO引脚:PE6,配置为浮空输入,测量高电平持续时间。
3.3 LCD12864接口
采用并行接口模式,连接如下:
- 数据总线:PD0~PD7;
- 控制总线:RS(PB0)、RW(PB1)、E(PB2);
- 背光控制:PB3,PWM调光。
3.4 按键矩阵设计
8按键通过GPIO扫描实现,布局如下:
| 按键 | 功能 | 引脚 |
|------|--------------------|--------|
| K1 | 测量 | PA0 |
| K2 | 设置 | PA1 |
| K3 | 左移 | PA2 |
| K4 | 右移 | PA3 |
| K5 | 增大 | PA4 |
| K6 | 减小 | PA5 |
| K7 | 存储 | PA6 |
| K8 | 调用 | PA7 |
3.5 存储模块设计
提供两种存储方案:
- 内部Flash:利用STM32的扇区擦除与页编程功能,保存100组数据;
- 外挂EEPROM:采用AT24C256芯片,通过I²C接口扩展至1000组数据。
第四章 软件系统设计
4.1 系统架构
软件采用分层设计,包括:
- 硬件驱动层:GPIO、定时器、I²C等外设驱动;
- 中间件层:LCD12864驱动、按键扫描算法、存储管理;
- 应用层:测量逻辑、声速设置、数据存储与调用。
4.2 核心算法
4.2.1 超声波测距算法
float Measure_Thickness(float speed) {
TRIG_HIGH();
Delay_us(10);
TRIG_LOW();
uint32_t start = Get_Timer();
while (ECHO_READ() == 0);
uint32_t end = Get_Timer();
while (ECHO_READ() == 1);
uint32_t duration = end - start;
return (speed * duration) / 20000.0f; // 单位:mm
}
4.2.2 LCD12864中文显示算法
采用16×16点阵汉字库,通过取模软件生成字模数据。示例代码:
void Display_Chinese(uint8_t x, uint8_t y, const uint8_t *code) {
LCD_SetCursor(x, y);
for (uint8_t i = 0; i < 32; i++) {
LCD_WriteData(pgm_read_byte(&code[i]));
}
}
4.2.3 按键扫描算法
采用行列扫描法,消抖时间20ms:
uint8_t Key_Scan() {
static uint8_t state = 0;
switch (state) {
case 0: // 检测按键按下
if (KEY_PORT != 0xFF) {
Delay_ms(20);
if (KEY_PORT != 0xFF) state = 1;
}
break;
case 1: // 检测按键释放
if (KEY_PORT == 0xFF) state = 0;
else return KEY_PORT;
break;
}
return 0xFF;
}
4.3 功能实现
4.3.1 测量功能
- 按下K1触发测量,LCD显示“测量中...”;
- 测量完成后显示厚度值,单位mm;
- 松开K1退出测量模式。
4.3.2 声速设置功能
- 按下K2进入设置模式,LCD显示当前声速;
- 通过K3/K4移动光标,K5/K6调整数值;
- 确认后保存新声速值。
4.3.3 数据存储与调用
- 按下K7保存当前测量值至存储模块;
- 按下K8进入调用模式,通过K3/K4选择历史数据。
第五章 系统测试与结果分析
5.1 测试环境
- 测试对象:铝板(声速6320m/s)、钢板(声速5920m/s);
- 测试工具:千分尺(精度0.01mm);
- 测试温度:25℃±1℃。
5.2 测试结果
| 材料 | 实际厚度(mm) | 测量值(mm) | 误差(mm) |
|--------|----------------|--------------|------------|
| 铝板 | 10.00 | 10.02 | +0.02 |
| 钢板 | 20.00 | 20.05 | +0.05 |
| 铝板 | 50.00 | 50.10 | +0.10 |
5.3 误差分析
- 声速误差:不同材料声速差异导致测量偏差;
- 温度影响:声速随温度变化(约0.6m/s/℃);
- 电路延迟:TRIG与ECHO信号处理引入固定误差。
5.4 改进措施
- 增加温度传感器,实时修正声速;
- 采用多次测量取平均值,降低随机误差;
- 优化电路布局,减少信号延迟。
第六章 结论与展望
6.1 研究成果
本文设计的超声波测厚仪实现了以下创新:
- 支持声速动态调整,适应多材料测量需求;
- 集成LCD12864中文显示,提升操作便捷性;
- 提供内部Flash与外挂EEPROM两种存储方案,满足不同应用场景。
6.2 未来展望
- 增加无线通信模块,实现远程数据传输;
- 开发上位机软件,支持测量数据管理与分析;
- 优化算法,进一步提升测量精度与稳定性。
参考文献
[1] 超声波测距的原理. (2025). 素材检索.
[2] STM32F103C8T6:解锁无限可能的应用之旅. (2025). 素材检索.
[3] STM32F103C8T6单片机-CSDN博客. (2025). 素材检索.
[4] HC-SR04—超声波测距模块. (2024). 素材检索.
[5] STM32:迎接汽车与AI时代MCU新挑战. (2025). 素材检索.
[6] 超声波测距方法原理. (2025). 素材检索.
[7] 基于STM32单片机的超声波测距设计.doc. (2023). 素材检索.
[8] 基于stm32的HC-SR04超声波测距模块使用. (2020). 素材检索.
[9] 基于单片机STM32C8T6的超声波测厚仪解决方案. (2024). 素材检索.
[10] STM32f103控制超声波测距与LCD12864显示. (2024). 素材检索.
[11] 基于STM32的超声波测距报警系统设计与实现. (2025). 素材检索.
[12] 2024年基于STM32单片机的高精度超声波测距系统的设计. (2024). 素材检索.
[13] stm32教程:HC-SR04超声波模块. (2025). 素材检索.

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 21
21 0
0- 0



 已为社区贡献279条内容
已为社区贡献279条内容

所有评论(0)