IMU模块:MPU6050获取运动变量
介绍MPU6050,并在树莓派4B上通过MPU6050获取IMU数据并集成到ROS中
一、MPU6050 引脚功能说明
在淘宝上买了一款MPU6050(如图)。它上面有8个引脚,这些引脚的作用如下:
| 引脚名称 | 功能描述 | 典型连接方式 | 注意事项 |
|---|---|---|---|
| VCC | 电源输入(3.3V) | 接树莓派 3.3V (Pin 1) | 严禁接5V,会烧毁芯片 |
| GND | 电源地 | 接树莓派 GND (Pin 6/9/14等) | 确保共地 |
| SCL | I²C时钟线(Serial Clock) | 接树莓派 GPIO3 (SCL, Pin 5) | 需4.7kΩ上拉电阻(开发板通常已集成) |
| SDA | I²C数据线(Serial Data) | 接树莓派 GPIO2 (SDA, Pin 3) | 与SCL同步上拉 |
| XDA | 辅助I²C数据线(连接外部磁力计如HMC5883L) | 接从设备SDA | 不使用时可悬空 |
| XCL | 辅助I²C时钟线(连接外部磁力计) | 接从设备SCL | 需外部上拉电阻 |
| AD0 | I²C地址选择脚: • 接地=0x68(默认) • 接VCC=0x69(多设备时用) |
通常接地(Pin 9) | 多MPU6050时需区分地址 |
| INT | 中断输出(可用于数据就绪/运动检测中断) | 接GPIO输入(如GPIO4, Pin 7) | 需在代码中配置中断触发条件 |
二、具体目标
在树莓派4B上通过MPU6050获取IMU数据并集成到ROS中
三、实现方法
需完成硬件连接、驱动配置、ROS节点开发三个步骤。以下是详细实现方案:
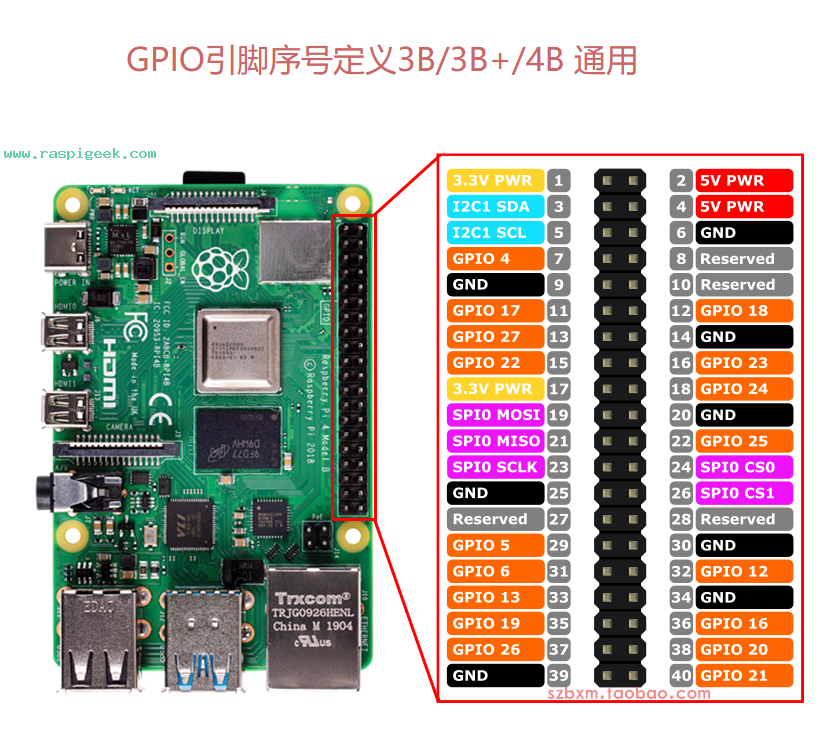
1. 硬件连接(I2C接口)
| MPU6050引脚 | 树莓派4B引脚 | 颜色标识 |
|---|---|---|
| VCC | 3.3V (Pin 1) | 红色 |
| GND | GND (Pin 6) | 黑色 |
| SDA | GPIO2 (Pin 3) | 蓝色 |
| SCL | GPIO3 (Pin 5) | 绿色 |
注意:
-
避免使用5V电源,防止MPU6050损坏
-
短接MPU6050的AD0引脚到GND(I2C地址为0x68)
2. 系统配置
启用I2C接口
sudo raspi-config
# 选择 Interfacing Options → I2C → Yes
sudo reboot安装依赖库
sudo apt-get install i2c-tools libi2c-dev python3-smbus
pip3 install RPi.GPIO numpy检测设备
sudo i2cdetect -y 1
# 应显示68地址的设备3. 数据读取(Python驱动)
创建 mpu6050_driver.py:
#!/usr/bin/env python3
import rospy
from sensor_msgs.msg import Imu
from smbus2 import SMBus
import math
class MPU6050:
def __init__(self, bus=1, address=0x68):
self.bus = SMBus(bus)
self.address = address
# 唤醒MPU6050
self.bus.write_byte_data(self.address, 0x6B, 0x00)
# 配置加速度计±8g
self.bus.write_byte_data(self.address, 0x1C, 0x10)
# 配置陀螺仪±1000°/s
self.bus.write_byte_data(self.address, 0x1B, 0x10)
def read_raw_data(self, addr):
high = self.bus.read_byte_data(self.address, addr)
low = self.bus.read_byte_data(self.address, addr+1)
value = (high << 8) | low
return value if value < 32768 else value - 65536
def get_imu_data(self):
# 加速度 (m/s²)
accel_x = self.read_raw_data(0x3B) / 4096.0 * 9.8
accel_y = self.read_raw_data(0x3D) / 4096.0 * 9.8
accel_z = self.read_raw_data(0x3F) / 4096.0 * 9.8
# 角速度 (rad/s)
gyro_x = math.radians(self.read_raw_data(0x43) / 32.8)
gyro_y = math.radians(self.read_raw_data(0x45) / 32.8)
gyro_z = math.radians(self.read_raw_data(0x47) / 32.8)
return accel_x, accel_y, accel_z, gyro_x, gyro_y, gyro_z
def imu_publisher():
rospy.init_node('mpu6050_node')
pub = rospy.Publisher('/imu/data_raw', Imu, queue_size=10)
imu = MPU6050()
rate = rospy.Rate(50) # 50Hz
while not rospy.is_shutdown():
msg = Imu()
msg.header.stamp = rospy.Time.now()
msg.header.frame_id = "imu_link"
# 读取数据
ax, ay, az, gx, gy, gz = imu.get_imu_data()
# 填充消息
msg.linear_acceleration.x = ax
msg.linear_acceleration.y = ay
msg.linear_acceleration.z = az
msg.angular_velocity.x = gx
msg.angular_velocity.y = gy
msg.angular_velocity.z = gz
# 发布数据
pub.publish(msg)
rate.sleep()
if __name__ == '__main__':
try:
imu_publisher()
except rospy.ROSInterruptException:
pass4. ROS集成
创建ROS包
catkin_create_pkg mpu6050_driver rospy sensor_msgs添加启动文件launch/mpu6050.launch:
<launch>
<!-- 静态TF (根据实际安装位置调整) -->
<node pkg="tf" type="static_transform_publisher" name="base_to_imu"
args="0.1 0 0.15 0 0 0 base_link imu_link 100" />
<!-- IMU驱动节点 -->
<node pkg="mpu6050_driver" type="mpu6050_driver.py" name="mpu6050_node"
output="screen" respawn="true">
<param name="i2c_bus" value="1" />
<param name="i2c_address" value="0x68" />
</node>
<!-- 数据滤波 (可选) -->
<node pkg="imu_filter_madgwick" type="imu_filter_node" name="imu_filter">
<param name="use_mag" value="false"/>
<remap from="/imu/data_raw" to="/imu/data"/>
</node>
</launch>5. 校准与验证
零偏校准
# 在MPU6050类中添加校准方法
def calibrate(self, samples=500):
offset = [0]*6
for _ in range(samples):
data = self.get_imu_data()
for i in range(6):
offset[i] += data[i]
self.offset = [x/samples for x in offset]可视化验证
rostopic echo /imu/data # 查看原始数据
rosrun rviz rviz # 添加Imu显示插件四、常见问题解决
-
I2C设备未发现
检查:sudo i2cdetect -y 1
解决:重新检查接线,确认上拉电阻(4.7kΩ)是否接好
-
数据漂移严重
校准:将机器人静止放置,运行校准程序
滤波:调整imu_filter_madgwick参数
<param name="gain" value="0.1"/>
<param name="zeta" value="0.01"/>-
数据频率低
优化:减少Python开销,改用C++驱动(如RTIMULib)
-
数据噪声大?
解决方案:缩短导线长度,增加0.1μF去耦电容
-
读取数据全为零?
检查步骤:
确认sudo i2cdetect -y 1显示设备地址
验证是否执行了唤醒操作:
bus.write_byte_data(0x68, 0x6B, 0x00) # PWR_MGMT_1寄存器
通过以上步骤,树莓派4B可稳定获取MPU6050数据并发布为标准ROS消息。实际部署时建议将IMU与里程计融合(如robot_localization包),提升定位精度。
五、进阶
5.1 扩展功能详解
-
I²C通信(SCL+SDA)
协议:标准I²C协议,树莓派默认总线1(/dev/i2c-1)
地址: sudo i2cdetect -y 1 # 输出 68 或 69(由AD0引脚决定)
-
辅助I²C(XDA+XCL)
用途:级联其他I²C传感器(如磁力计)构成9轴IMU
配置:需在MPU6050寄存器中启用旁路模式(Python示例):
bus.write_byte_data(0x68, 0x37, 0x02) # INT_PIN_CFG寄存器-
中断引脚(INT)
可通过配置以下寄存器实现:
0x38(INT_ENABLE):启用数据就绪中断
0x37(INT_PIN_CFG):设置中断触发方式
典型应用:
# Raspberry Pi GPIO中断示例
GPIO.setup(7, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.add_event_detect(7, GPIO.FALLING, callback=isr_handler)5.2 性能优化技巧
1. 硬件滤波
在MPU6050的ACCEL_CONFIG(0x1C)和GYRO_CONFIG(0x1B)寄存器中配置低通滤波
2. 提高I2C速率(默认100kHz → 400kHz)
sudo nano /boot/config.txt
# 添加:dtparam=i2c_arm=on,i2c_arm_baudrate=400000
sudo reboot3. 使用DMP(Digital Motion Processor,需C++驱动)
// 启用MPU6050内置数字运动处理器
mpu.setDMPEnabled(true);MPU6050内置DMP可硬件解算姿态(需配置寄存器):
# 启用DMP(需加载官方固件)
bus.write_byte_data(0x68, 0x6B, 0x00) # 解除睡眠
bus.write_byte_data(0x68, 0x6A, 0x00) # 禁用主I2C
bus.write_byte_data(0x68, 0x37, 0x02) # 启用旁路
bus.write_byte_data(0x68, 0x38, 0x01) # 启用DMP中断实际开发中建议优先使用成熟库(如RTIMULib或MPU6050.py)简化开发。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 11
11 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)