基于STM32旋转编码器测速
旋转编码器测速是嵌入式系统中测量电机转速的核心技术之一,广泛应用于机器人、自动化控制、工业传动等领域。本概述将从技术原理、硬件实现、软件设计及工程应用等方面,系统阐述基于 STM32 微控制器的旋转编码器测速方案。STM32F103C8T6是一款基于ARM Cortex-M3内核的STM32系列32位微控制器是TQFP48封装,共有20个引脚,具有72MHz的主频和1.25 DMIPS/MHz的计
目录
一、概述
旋转编码器测速是嵌入式系统中测量电机转速的核心技术之一,广泛应用于机器人、自动化控制、工业传动等领域。本概述将从技术原理、硬件实现、软件设计及工程应用等方面,系统阐述基于 STM32 微控制器的旋转编码器测速方案。
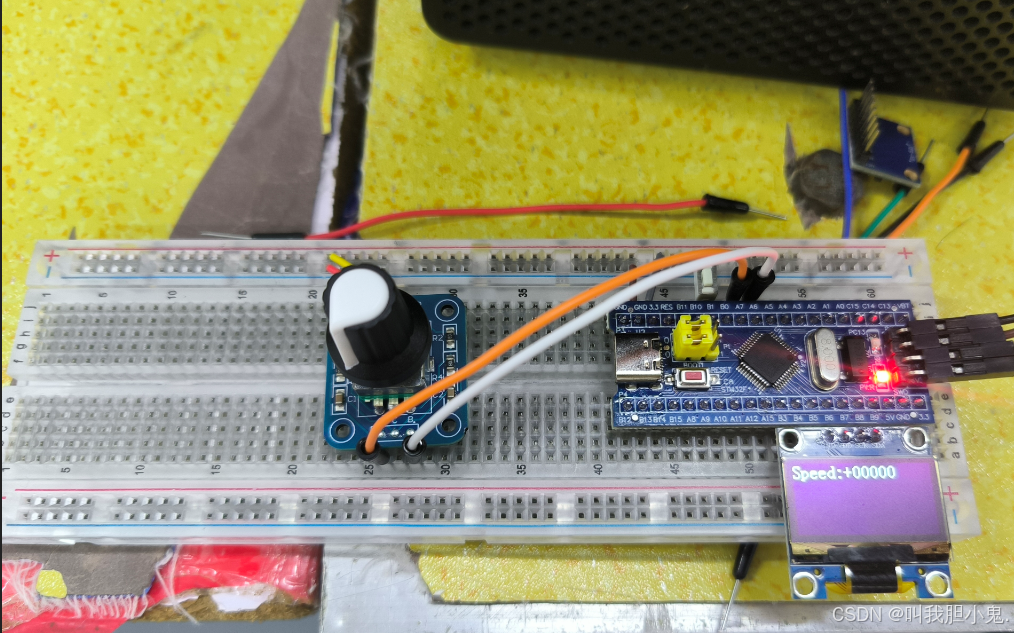
图1
二、系统总体模块
STM32F103C8T6芯片
OLED液晶屏
旋转编码器模块
本次以STM32F103C8T6芯片为核心,通过旋转编码器的正转反转来实现测速功能。
三、模块介绍
3.1 STM32F103C8T6芯片
STM32F103C8T6是一款基于ARM Cortex-M3内核的STM32系列32位微控制器是TQFP48封装,共有20个引脚,具有72MHz的主频和1.25 DMIPS/MHz的计算能力以及64KB的Flash存储器和20KB的SRAM存储器工作电压2V~3.6V。
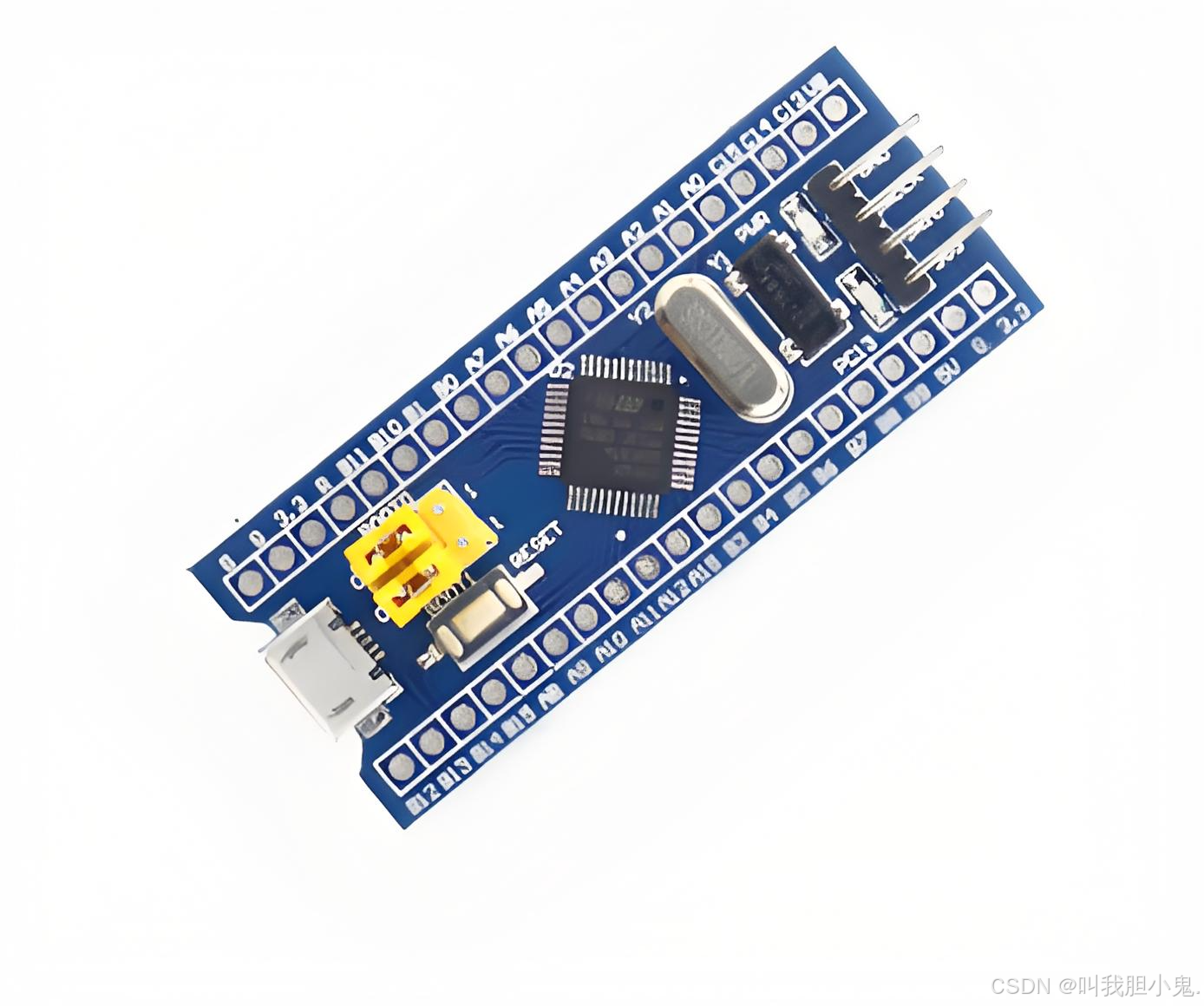
图2
3.2 OLED液晶屏模块
OLED液晶屏的工作原理是通过电场驱动,使有机半导体材料和发光材料在过载流子注入和复合后实现发光。具体来说,它使用ITO透明电极和金属电极分别作为器件的阳极和阴极,在一定电压驱动下,电子和空穴分别从阴极和阳极注入到电子和空穴传输层,然后在发光层中相遇形成激子,激子激发发光分子,最终发出可见光。

图3
3.3 旋转编码器模块
旋转编码器(Rotary Encoder)是一种将旋转位移转换为电信号的传感器,主要用于精确测量角度、速度和位置。其核心优势在于高精度、高可靠性和实时反馈能力,是闭环控制系统中的关键组件。
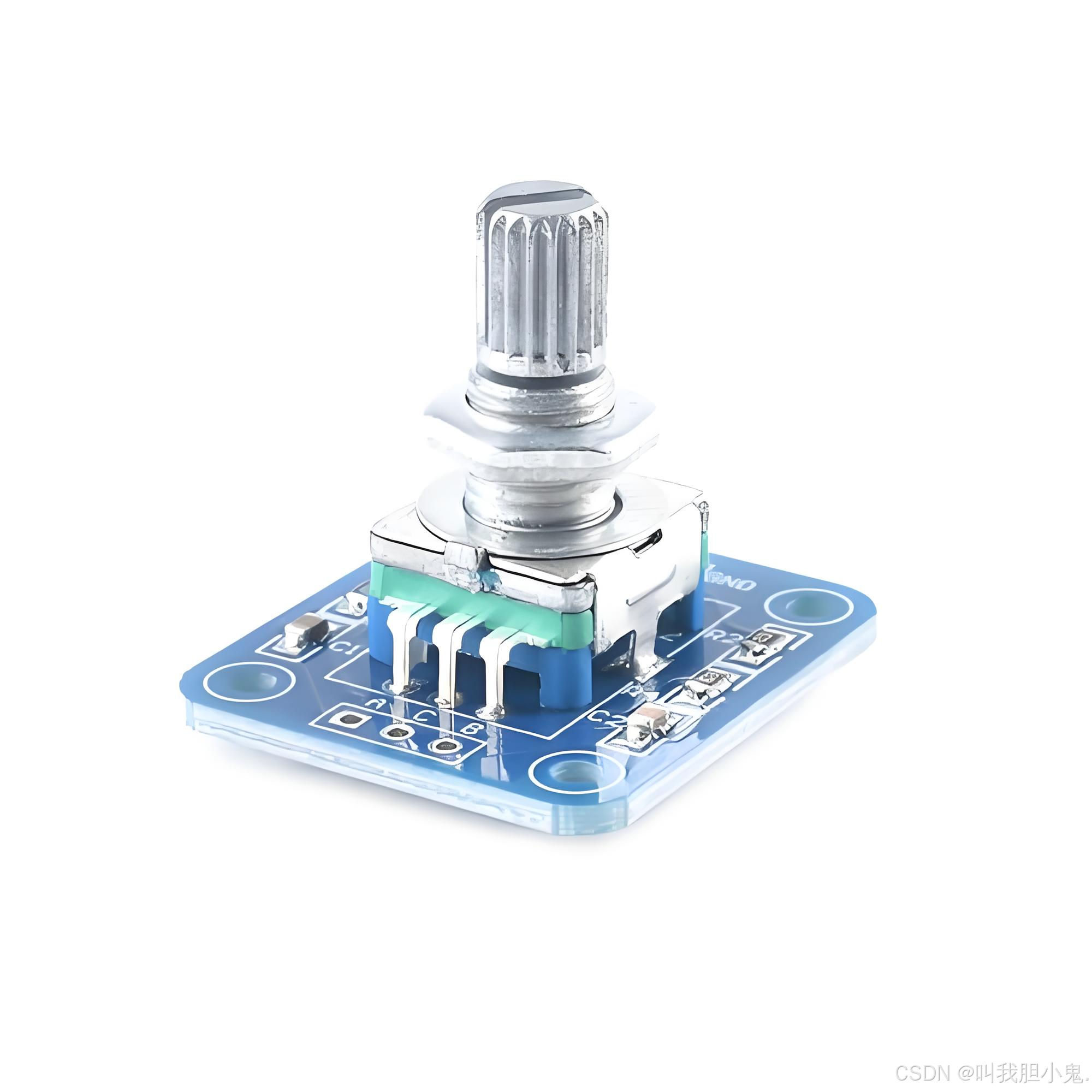
图4
四、源程序代码
4.1 Encoder.c文件
#include "stm32f10x.h" // Device header
/**
* 函 数:编码器初始化
* 参 数:无
* 返 回 值:无
*/
void Encoder_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //开启TIM3的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA6和PA7引脚初始化为上拉输入
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM3的时基单元
/*输入捕获初始化*/
TIM_ICInitTypeDef TIM_ICInitStructure; //定义结构体变量
TIM_ICStructInit(&TIM_ICInitStructure); //结构体初始化,若结构体没有完整赋值
//则最好执行此函数,给结构体所有成员都赋一个默认值
//避免结构体初值不确定的问题
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择配置定时器通道1
TIM_ICInitStructure.TIM_ICFilter = 0xF; //输入滤波器参数,可以过滤信号抖动
TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; //选择配置定时器通道2
TIM_ICInitStructure.TIM_ICFilter = 0xF; //输入滤波器参数,可以过滤信号抖动
TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道
/*编码器接口配置*/
TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
//配置编码器模式以及两个输入通道是否反相
//注意此时参数的Rising和Falling已经不代表上升沿和下降沿了,而是代表是否反相
//此函数必须在输入捕获初始化之后进行,否则输入捕获的配置会覆盖此函数的部分配置
/*TIM使能*/
TIM_Cmd(TIM3, ENABLE); //使能TIM3,定时器开始运行
}
/**
* 函 数:获取编码器的增量值
* 参 数:无
* 返 回 值:自上此调用此函数后,编码器的增量值
*/
int16_t Encoder_Get(void)
{
/*使用Temp变量作为中继,目的是返回CNT后将其清零*/
int16_t Temp;
Temp = TIM_GetCounter(TIM3);
TIM_SetCounter(TIM3, 0);
return Temp;
}
4.2 LED.c文件
#include "stm32f10x.h" // Device header
/**
* 函 数:LED初始化
* 参 数:无
* 返 回 值:无
*/
void LED_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA1和PA2引脚初始化为推挽输出
/*设置GPIO初始化后的默认电平*/
GPIO_SetBits(GPIOA, GPIO_Pin_1 | GPIO_Pin_2); //设置PA1和PA2引脚为高电平
}
/**
* 函 数:LED1开启
* 参 数:无
* 返 回 值:无
*/
void LED1_ON(void)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_1); //设置PA1引脚为低电平
}
/**
* 函 数:LED1关闭
* 参 数:无
* 返 回 值:无
*/
void LED1_OFF(void)
{
GPIO_SetBits(GPIOA, GPIO_Pin_1); //设置PA1引脚为高电平
}
/**
* 函 数:LED1状态翻转
* 参 数:无
* 返 回 值:无
*/
void LED1_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_1) == 0) //获取输出寄存器的状态,如果当前引脚输出低电平
{
GPIO_SetBits(GPIOA, GPIO_Pin_1); //则设置PA1引脚为高电平
}
else //否则,即当前引脚输出高电平
{
GPIO_ResetBits(GPIOA, GPIO_Pin_1); //则设置PA1引脚为低电平
}
}
/**
* 函 数:LED2开启
* 参 数:无
* 返 回 值:无
*/
void LED2_ON(void)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_2); //设置PA2引脚为低电平
}
/**
* 函 数:LED2关闭
* 参 数:无
* 返 回 值:无
*/
void LED2_OFF(void)
{
GPIO_SetBits(GPIOA, GPIO_Pin_2); //设置PA2引脚为高电平
}
/**
* 函 数:LED2状态翻转
* 参 数:无
* 返 回 值:无
*/
void LED2_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_2) == 0) //获取输出寄存器的状态,如果当前引脚输出低电平
{
GPIO_SetBits(GPIOA, GPIO_Pin_2); //则设置PA2引脚为高电平
}
else //否则,即当前引脚输出高电平
{
GPIO_ResetBits(GPIOA, GPIO_Pin_2); //则设置PA2引脚为低电平
}
}
4.3 main.c文件
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
#include "Encoder.h"
int16_t Speed; //定义速度变量
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
Timer_Init(); //定时器初始化
Encoder_Init(); //编码器初始化
/*显示静态字符串*/
OLED_ShowString(1, 1, "Speed:"); //1行1列显示字符串Speed:
while (1)
{
OLED_ShowSignedNum(1, 7, Speed, 5); //不断刷新显示编码器测得的最新速度
}
}
/**
* 函 数:TIM2中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) //判断是否是TIM2的更新事件触发的中断
{
Speed = Encoder_Get(); //每隔固定时间段读取一次编码器计数增量值,即为速度值
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除TIM2更新事件的中断标志位
//中断标志位必须清除
//否则中断将连续不断地触发,导致主程序卡死
}
}
五、心得体会
5.1 理论与实践的差距
书本上的 M/T 测速算法在实际应用中需根据转速范围动态切换
编码器分辨率与测量精度直接相关,需根据需求选择合适 PPR 值
5.2 软件优化方向
定时器溢出处理:当编码器高速旋转时,定时器计数器可能溢出导致数据跳变。需结合定时器中断与溢出标志位,实现循环计数与数据补偿。
抗干扰设计:增加软件滤波算法(如中值滤波、滑动平均滤波),抑制脉冲信号中的噪声干扰。
5.3 调试经验总结
硬件调试:使用示波器观测编码器 A、B 相波形,重点检查上升 / 下降沿是否稳定,相位差是否接近 90°。
功能测试:模拟电机启动、停止、正反转等工况,验证转速计算的准确性与系统稳定性,及时修复算法缺陷。
六、应用拓展与展望
基于 STM32 的旋转编码器测速技术不仅可用于简单的转速测量,还能与 PID 控制算法结合,实现电机转速的闭环精确控制;通过通信接口,如串口、CAN 总线、以太网等,将转速数据传输至远程监控系统,实现设备的远程监测与管理。随着物联网、人工智能技术的不断发展,该技术有望在更多智能化、自动化领域发挥重要作用,为工业生产和生活带来更多便利与创新。
七、附录
7.1 接线图
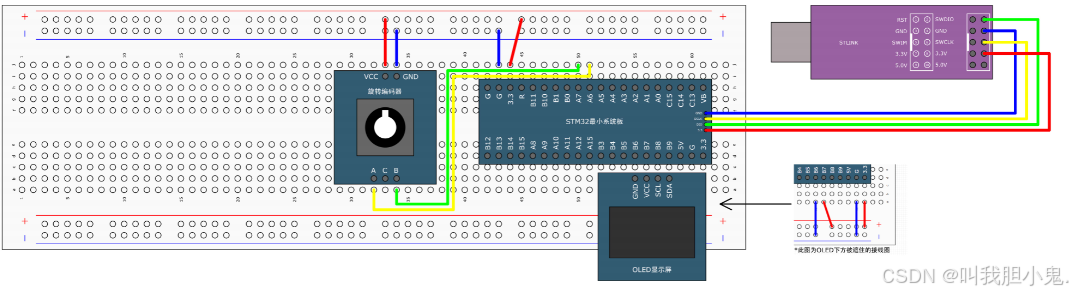
图5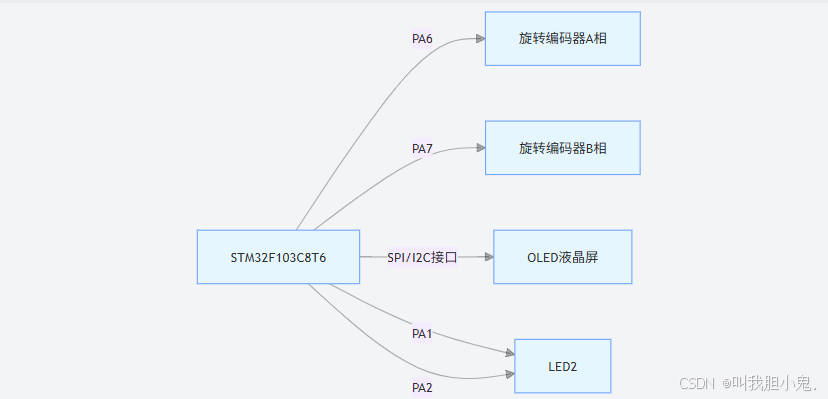
图6
7.2 实验效果视频
注:转速越快数值越大
本文通过理论与实践结合,完整呈现基于 STM32 的旋转编码器测速方案。如需进一步优化或拓展功能,可结合 PID 控制实现速度闭环调节,或通过通信接口实现远程数据传输。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)