Linux驱动第十二章、块设备驱动
本文介绍了Linux内核中块设备驱动的基本概念与开发框架。块设备以数据块为单位进行传输,具有缓冲机制,常见设备包括硬盘、U盘等。文章详细阐述了块设备的三个处理层级:文件系统层、IO调度层和驱动层,并解释了关键数据结构如bio、request_queue和gendisk的作用。重点讲解了基于内存模拟磁盘的块设备驱动实现过程,包括设备注册、请求队列初始化、IO请求处理等核心步骤。通过示例代码展示了如何
第一节、块设备:
1. 概念:数据传输以块为单位,有缓冲的设备,数据传输非实时性。
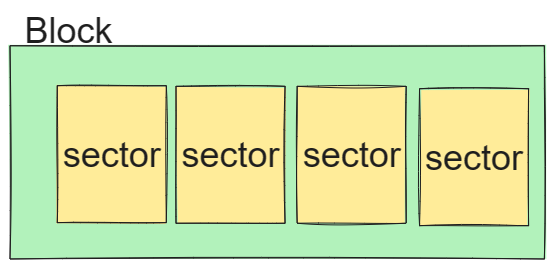
- 扇区(sector),概念来自于早期磁盘,作为描述磁盘上数据存储的基本单位。往往是一个扇区= 512字节。
- 块(Block),概念来自于文件系统,是内核对文件系统数据处理的基本单位,大小为若干个扇区,常见有512B、1KB、4KB等。
-
早期块设备中的几个概念:磁盘的几何物理信息:geo
- 磁头(Head):读写数据的传感器。
- 磁道(Tracks):每个盘片表面被划分成同心圆,每个同心圆称为一个磁道。
- 柱面(Cylinders):磁盘盘面上的磁道的集合。
注意:块设备驱动和字符设备驱动不同,应用层对块设备驱动的访问一般不是直接操作设备文件(/dev/block/xxx,或者/dev/sdax)应用程序通过文件系统的接口来read/write文件数据。第二节、块设备驱动框架、
-
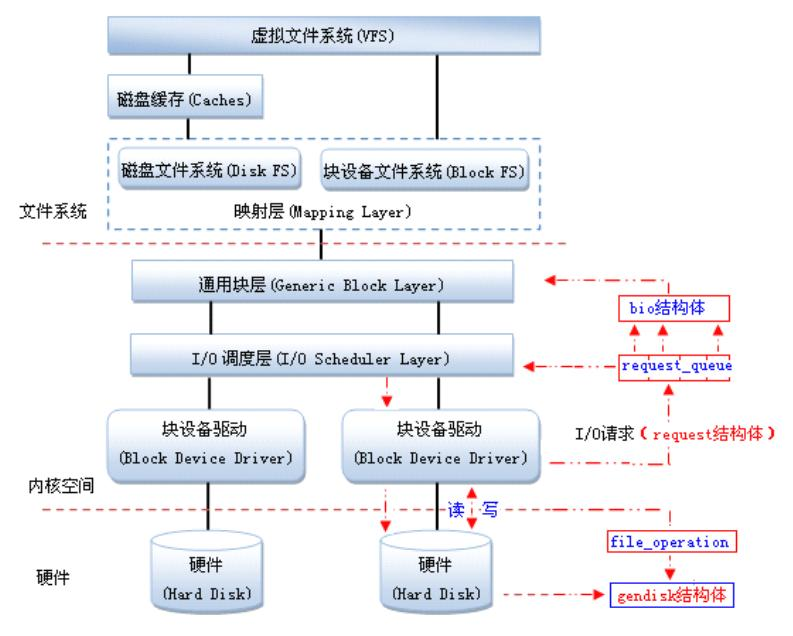
1.调用链:
- 文件系统层:将读写请求转化为 bio 结构体对象,并调用 submit_bio(通用块层的函数,非fops中的属性指针) 提交请求。
- 通用块层/IO调度层:submit_bio 中会把 bio 添加到 request中,并形成一个request_queue队列,并且使用调度算法对 request_queue 中的请求进行优化调度,并调用块设备驱动的 make_request_fn 处理请求。
- 块设备驱动:从 request_queue 中提取请求,并通过硬件接口执行读写操作。
2.映射层:把虚拟地址转换为逻辑块地址:
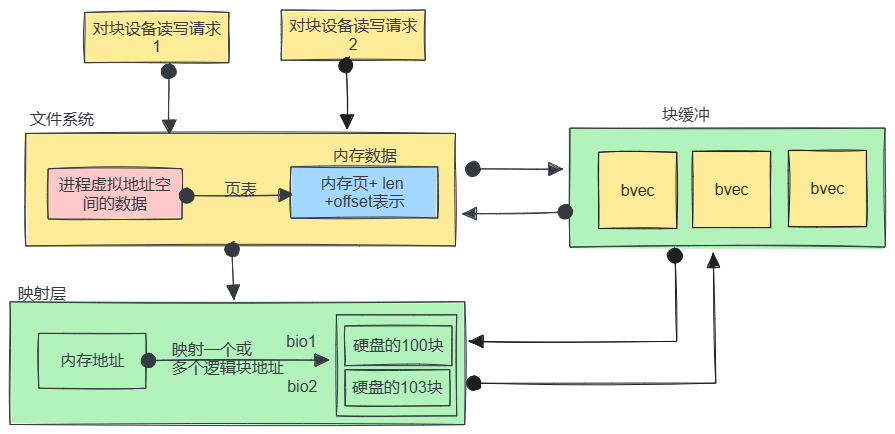
-
bio_vec用于描述IO操作中的单个数据段的结构。
3.块设备驱动需要IO调度:
如果简单地以内核产生请求的次序直接将请求发向块设备的话,性能肯定让人难以接受,磁盘寻址是整个计算机中 的最慢的操作之一,每一次寻址,都要定位磁头到特定的某个位置,这需要花费很多的时间,为了优化寻址操作,内核既不会简单地按请求接收次序,也不会立即请其提交给磁盘,相反,它会在提交前,先执行名为合并与排序的预操作,这种预操作可以极大的提高系统的于于整体性能。在内核中负责提交IO请求的子系统被称为IO调度器。
常用的IO调度算法有:如:电梯调度法,合并请求法,最短寻道时间优先法等。。。图示:
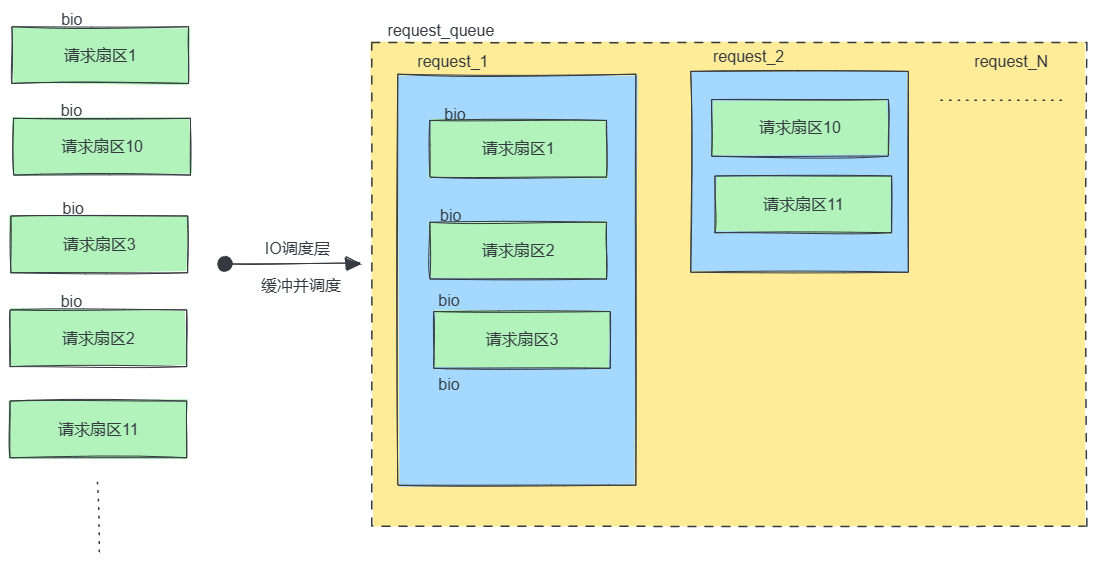
-
第三节、块设备常用类型及接口:
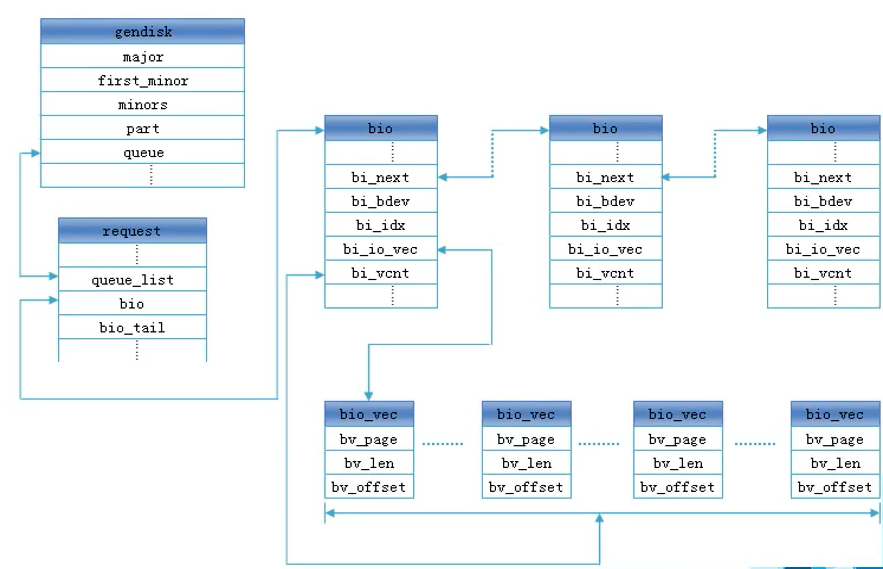
1. 认识块设备抽象表示gendisk数据结构:
-
1.bio结构体:
struct bio { struct bio *bi_next; /* request queue link */ struct block_device *bi_bdev; struct bvec_iter bi_iter;/*映射的LBA起始扇区号在这个属性中*/ unsigned short bi_vcnt; /* bio_vec's个数 */ struct bio_vec *bi_io_vec; /* the actual vec list */ struct bio_vec bi_inline_vecs[];//多个bivec的数组: };2.bio_vec结构体:
struct bio_vec { struct page *bv_page; // 指向数据所在的页 unsigned int bv_len; // 数据段的长度(字节数) unsigned int bv_offset; // 数据段在页中的偏移量 };3.request请求结构体:
struct request { struct request_queue *q; // 指向请求队列的指针 struct blk_mq_hw_ctx *mq_hctx; // 硬件队列上下文 struct blk_mq_ctx *mq_ctx; // 请求上下文 unsigned int cmd_flags; // 请求标志 rq_end_io_fn *end_io; // 请求完成时的回调函数 void *end_io_data; // 请求完成时的回调数据 struct bio *bio; // 指向第一个 bio 结构体的指针 struct bio *biotail; // 指向最后一个 bio 结构体的指针 sector_t __sector; // 请求的起始扇区号 sector_t __data_len; // 请求的数据长度(以扇区为单位) unsigned int nr_phys_segments; // 请求的物理段数 unsigned int nr_hw_segments; // 请求的硬件段数 struct gendisk *rq_disk; // 请求所属的块设备 struct blk_mq_ctx *mq_ctx; // 请求的上下文 int cpu; // 请求处理的 CPU ...//其它更从属性略 };4.struct gendisk结构体:
struct gendisk { int major; //块设备的主设备号 int first_minor; //起始的次设备号 int minors; //次设备的个数,也是分区的个数。 char disk_name[DISK_NAME_LEN]; //块设备的磁盘的名字 ... struct disk_part_tbl __rcu *part_tbl; //块设备的磁盘分区表的首地址 struct hd_struct part0; //paro0分区的描述 const struct block_device_operations *fops; //块设备的操作方式结构体 struct request_queue *queue; //队列(重要属性)完成读写的操作在此进行。 void *private_data;//私有数据传参使用 ... }; 磁盘分区结构体: struct hd_struct { sector_t start_sect;//起始扇区 sector_t nr_sects;//扇区的个数 ... int partno;//分区号 ... }; struct block_device_operations { //老式的处理提交的 bio的回调,现新式blk_mq队列处理,已经不再使用了。 blk_qc_t (*submit_bio) (struct bio *bio); //打开块设备。当用户进程试图打开设备文件时调用。 int (*open) (struct block_device *, fmode_t); //释放块设备。当用户进程关闭设备文件时调用。 void (*release) (struct gendisk *, fmode_t); //处理控制命令(ioctl)。用于执行设备特定的操作。 int (*ioctl) (struct block_device *, fmode_t, unsigned, unsigned long); ... //获取设备几何信息。这个函数用于返回设备的几何参数,如柱面数、磁头数、扇区数等 int (*getgeo)(struct block_device *, struct hd_geometry *); //设置磁头,磁盘,磁道,扇区的个数 = 容量。 ... };2.块设备驱动的的构建流程:与字符设备驱动类似:
1.申请块设备号:
int register_blkdev(unsigned int major, const char* name); majo :0 自动申请 major > 0 :静态指定 name 申请到的设备的名字,可以在proc/device目录下看到。 返回值: major = 0; 成功返回主设备号,失败返回错误码。 major > 0;成功返回0,失败返回错误码。 int unregister_blkdev(unsigned int major, const char* name);2.申请gendisk结构体:
struct gendisk* alloc_disk(int minors) 功能:分配gendisk的内存,然后完成必要的初始化 参数:minors:分区的个数 返回值:成功返回分配到的内存的首地址,失败返回NULL; //回收gendisk内存: void put_disk(struct gendisk* disk);3.填充gendisk结构体:
1.是gdisk中的fops结构体中属性,一系统的回调函数。 实现几个常用的函数:比如打开open,close等,对应的块设备的挂载与卸载。 2.对请求队列进行初始化:request_queue *blk_mq_init_queue(struct blk_mq_tag_set *set); 3.块设备驱动的名称。 4.设置磁盘的容量:set_capacity(gendisk, 块数);4.注册、注销gendisk结构体:
//一系列初始化完成之后,就是注册块设备,不使用时就注销: void add_disk(struct gendisk* disk); //注销: void del_gendisk(struct gendisk* disk);5.IO请求队列的初始化及回调的处理:
struct request_queue *blk_mq_init_sq_queue(struct blk_mq_tag_set *set, const struct blk_mq_ops *ops, unsigned int queue_depth, unsigned int set_flags) 用于设置具有多队列操作的队列的辅助函数,给定队列深度和传入的多队列操作标志 //功能:用于初始化多队列的函数,注册队列到块设备层。适用于并发高与高性能块设备,如NVMe SSD //参数:set:是一个多队列操作的标签集合对象,用于配置多队列的操作。 //参数:ops:请求处理的回调函数 //参数:quue_depth队列深度,就是可以容纳请求的个数。 //参数:set_flags:指队列处理优化选项,一般设置允许合并:BLK_MQ_F_SHOULD_MERGE //成功返回requeue_queue的地址,失败返回NULL;6.管理块设备多队列 (Multi-Queue) 处理的数据结构struct blk_mq_tag_set:
struct blk_mq_tag_set { unsigned int nr_hw_queues; /**< 硬件队列的数量,通常设置为 CPU 核心数*/ unsigned int queue_depth; /**< 每个硬件队列的深度 ,表示每个队列可以容纳的最大请求数*/ unsigned int reserved_tags; /**< 保留的标签数量 */ unsigned int nr_maps; /**< 映射集的数量 通常与 NUMA 节点或 CPU 组相关*/ unsigned int *map_timeout; /**< 每个硬件队列的超时值数组 */ unsigned int timeout_seq; /**< 用于超时处理的序列号 */ struct blk_mq_ops *ops; /**< 队列的操作集合 指向包含队列操作函数(如请求提交和完成)的结构体*/ struct blk_mq_ctxs *ctxs; /**< 每个 CPU 的上下文 */ struct blk_mq_tags **tags; /**< 标签结构体指针数组 每个指针代表一个硬件队列*/ struct blk_mq_tag_set *shared_tags; /**< 共享标签集合的指针 */ void *driver_data; /**< 驱动程序特定的私有数据 */ unsigned int cmd_size; /**< 每个命令的大小 */ unsigned int numa_node; /**< NUMA 节点号 */ unsigned int flags; /**< 标志位 指示标签集合的各种选项和行为,例如请求合并*/ unsigned int timeout; /**< 请求的超时时间 单位为毫秒*/ unsigned int reserved_gfp; /**< 分配保留请求内存时使用的 GFP 标志 */ unsigned int reserved_cpu; /**< 保留的 CPU 数量 */ };7.多队列处理请求的操作方式结构体:struct blk_mq_ops:
struct blk_mq_ops { blk_status_t (*queue_rq)(struct blk_mq_hw_ctx *hctx, const struct blk_mq_queue_data *bd); /**< 提交请求的函数,必需。 */ void (*commit_rqs)(struct blk_mq_hw_ctx *hctx); /**< 提交所有排队的请求。 */ bool (*get_budget)(struct blk_mq_hw_ctx *hctx); /**< 获取预算(budget)函数,用于控制队列中的请求数量,防止过载。 */ void (*put_budget)(struct blk_mq_hw_ctx *hctx); /**< 释放预算(budget)函数,完成请求后释放预算。 */ enum blk_eh_timer_return (*timeout)(struct request *rq, bool reserved); /**< 请求超时处理函数。 */ int (*poll)(struct blk_mq_hw_ctx *hctx, unsigned int tag); /**< 轮询函数,用于检查请求的完成状态。 */ int (*busy)(struct request_queue *q); /**< 检查队列是否繁忙的函数。 */ void (*complete)(struct request *rq); /**< 请求完成处理函数。 */ void (*initialize_rq_fn)(struct request *rq); /**< 初始化请求函数,在请求初始化时调用。 */ void (*exit_hctx)(struct blk_mq_hw_ctx *hctx, unsigned int hctx_idx); /**< 退出硬件队列上下文函数,在销毁硬件队列时调用。 */ int (*init_hctx)(struct blk_mq_hw_ctx *hctx, void *driver_data, unsigned int hctx_idx); /**< 初始化硬件队列上下文函数,在创建硬件队列时调用。 */ void (*exit_request)(struct blk_mq_tag_set *set, struct request *rq, unsigned int hctx_idx); /**< 请求退出函数,在销毁请求时调用。 */ int (*init_request)(struct blk_mq_tag_set *set, struct request *rq, unsigned int hctx_idx, unsigned int numa_node); /**< 请求初始化函数,在创建请求时调用。 */ void (*map_queues)(struct blk_mq_tag_set *set); /**< 映射队列函数,用于将队列映射到硬件或 CPU。 */ };8. I/O 请求(request)提交到硬件队列的回调属性:queue_rq:必需实现。
所谓的硬件队列是指处理多队列请求时所使用的多核心处理器队列。主要用来实现并行处理与资源分配的,这部分已经由内核实现。我们只需要关心这个处理的实现即可:
blk_status_t (*queue_rq)(struct blk_mq_hw_ctx *hctx, const struct blk_mq_queue_data *bd); //queue_rq 回调的函数的主要功能是将一个 I/O 请求(request)提交到硬件队列(hardware queue)中进行处理。 //这个函数是必需的,因为它定义了如何将请求传递给底层硬件或驱动程序。 //参数:hctx:是指向硬件队列上下文的指针。这个结构体包含了硬件队列的相关信息,如队列的索引、CPU 上下文等 //参数:bd 指向包含请求数据的队列数据结构的指针。这个结构体包含了需要提交的请求(request)以及其他相关信息. //返回值: blk_status_t描述的是: 返回请求提交的状态码,指示请求提交操作的结果。可能的返回值包括但不限于: BLK_STS_OK:请求提交成功。 BLK_STS_RESOURCE:由于资源限制,无法提交请求(例如队列满)。 BLK_STS_DEV_RESOURCE:由于设备资源限制,无法提交请求。 BLK_STS_IOERR:请求提交过程中发生了 I/O 错误。 此函数处理要遵从一定的框架:需要使用一系列辅助函数: //1.获取请求方向的函数:是read还是write: int status = rq_data_dir(rq); //如果是写为1,如果是读为0 //2.开始处理请求: void blk_mq_start_request(struct request *rq); //3.结束处理请求: void blk_mq_end_request(struct request *rq, blk_status_t error);9.辅助宏:遍历请求:rq_for_each_segment 宏:
#define rq_for_each_segment(bv, rq, iter) \ bio_for_each_segment_all(bv, rq->bio, iter) bv: struct bio_vec 类型的变量,用于保存当前遍历到的数据段信息,为当前遍历到的bio中的bvec数据段。 rq: struct request * 类型的指针,指向需要遍历的请求。 iter: struct req_iterator 类型的变量,用于跟踪遍历过程中的状态,指向当前遍历到的bio。3.块设备驱动示例:使用虚拟内存模拟磁盘设备。
块设备驱动实例代码:
#include <linux/module.h> #include <linux/init.h> #include <linux/genhd.h> #include <linux/blkdev.h> #include <linux/blk-mq.h> #include <linux/vmalloc.h> #include <linux/hdreg.h> // 封装一个虚拟磁盘设备类型: struct VM_Disk { // 通用的块设备属性 struct gendisk *disk; // 虚拟磁盘的起始地址: void *vm_start_addr; // 虚拟磁盘的容量大小: u32 capacity; // 虚拟磁盘的分区个数: int minors; // 虚拟磁盘的名字: const char *name; // 虚拟磁盘的请求队列的操作标签属性: struct blk_mq_tag_set set; }; struct VM_Disk vm_disk = { .capacity = 1024 * 1024 * 1, .minors = 5, .name = "vmdisk", }; int myblk_open(struct block_device *blk_dev, fmode_t mod) { printk("myblk_open执行了\n"); return 0; } void myblk_release(struct gendisk *gend, fmode_t mod) { printk("myblk_release执行了\n"); } int myblk_getgeo(struct block_device *blk, struct hd_geometry *geo) { geo->cylinders = 8; geo->heads = 8; geo->sectors = vm_disk.capacity / geo->cylinders / geo->heads / 512; return 0; } struct block_device_operations blk_ops = { .open = myblk_open, .release = myblk_release, .getgeo = myblk_getgeo, }; // IO请求的处理函数:解析队列中的所有请求,然后执行操作 blk_status_t myblk_queue_rq(struct blk_mq_hw_ctx *ctx, const struct blk_mq_queue_data *data) { blk_status_t status = BLK_STS_OK; // 解析队列并处理请求的逻辑:... struct request *rq = data->rq; struct bio_vec bvec; struct req_iterator rq_iter; u32 pos = rq->__sector * 512; blk_mq_start_request(rq); rq_for_each_segment(bvec, rq, rq_iter) { // 通过bvec数据的线性地址转换为内核虚拟地址: void *bvec_addr = page_address(bvec.bv_page) + bvec.bv_offset; if (rq_data_dir(rq) == WRITE) // 写方向 { // 从bvec指定的内存位置取出数据,拷贝到,磁盘的相应的物理地址处: memcpy(vm_disk.vm_start_addr + pos, bvec_addr, bvec.bv_len); } else { // 从磁盘具体的物理地址处取出数据,拷贝到bvec指定的内存位置: memcpy(bvec_addr, vm_disk.vm_start_addr + pos, bvec.bv_len); } pos += bvec.bv_len; } printk("处理了一次请求\n"); blk_mq_end_request(rq, status); return status; } struct blk_mq_ops mq_ops = { .queue_rq = myblk_queue_rq, }; int vm_disk_init(struct VM_Disk *vm) { // 申请通用块设备属性的空间: vm->disk = alloc_disk(vm->minors); // 申请磁盘的空间: vm->vm_start_addr = vmalloc(vm->capacity); // 对gendisk属性的内部属性进行初始化: strcpy(vm->disk->disk_name, vm->name); // 申请块设备的设备号:major: vm->disk->major = register_blkdev(0, vm->name); vm->disk->first_minor = 0; // 设置磁盘的容量: set_capacity(vm->disk, vm->capacity / 512); // 设置磁盘的操作的方法: vm->disk->fops = &blk_ops; // 设置磁盘操作的请求队列: vm->disk->queue = blk_mq_init_sq_queue(&vm->set, &mq_ops, 128, BLK_MQ_F_SHOULD_MERGE); printk("---vmdisk初始化完成----\n"); return 0; } void vm_disk_destory(struct VM_Disk *vm) { // 回收请求队列: blk_cleanup_queue(vm->disk->queue); unregister_blkdev(vm->disk->major, vm->name); vfree(vm->vm_start_addr); put_disk(vm->disk); } // 入口函数: int __init my_test_module_init(void) { vm_disk_init(&vm_disk); // 注册通用的块设备对象: add_disk(vm_disk.disk); return 0; } // 出口函数: void __exit my_test_module_exit(void) { // 注销块设备: del_gendisk(vm_disk.disk); vm_disk_destory(&vm_disk); printk("出口函数执行了\n"); } // 指定许可: MODULE_LICENSE("GPL"); MODULE_AUTHOR("gaowanxi, email:gaonetcom@163.com"); // 指定入口及出口函数: module_init(my_test_module_init); module_exit(my_test_module_exit);磁盘分区命令:fdisk /dev/xx_disk -u 进入命令
使用n添加新分区;
使用w保存分区表并即出。
分区格式化:建立文件系统:
mkfs.extx /dev/xx_diskx
通过添加分区及格式化,这个磁盘就可以使用了。使用mount挂载与umount取消挂载。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 12
12 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)