【嵌入式电机控制#2】直流有刷电机硬件部分
1. 定子:产生固定的磁场2. 转子: 由一个多个绕组构成,通电后在磁场中受力运动3. 电刷:将外部磁场电流输入到转子绕组上4. 换向器:改变绕组中电流的流向1. 额定电压:电机正常工作的电压2. 额定电流: 负载电流,电机带负载正常工作时的电流3. 额定转速: 负载转速,单位RPM4. 额定扭矩: 电机额定电流下输出力的大小,常用kg.cm N.M5. 减速比:
一、优点缺点:驱动简单、操控简单、调速性能优良|寿命短可靠性差、换向火花易产生Emp
二、电机组成结构
1. 定子:产生固定的磁场
2. 转子: 由一个多个绕组构成,通电后在磁场中受力运动
3. 电刷:将外部磁场电流输入到转子绕组上
4. 换向器:改变绕组中电流的流向

三、参数
1. 额定电压:电机正常工作的电压
2. 额定电流: 负载电流,电机带负载正常工作时的电流
3. 额定转速: 负载转速,单位RPM
4. 额定扭矩: 电机额定电流下输出力的大小,常用kg.cm N.M
5. 减速比: 电机原始转速和经过减速器后转速的比值
注意:不要使用过大负载,即电机总功率不能超过驱动芯片额定输出功率,否则会堵转过热甚至烧掉。电机选型时一定要注意计算功率参数。
四、工作原理
1. 左手定则(略)
2. 工作过程
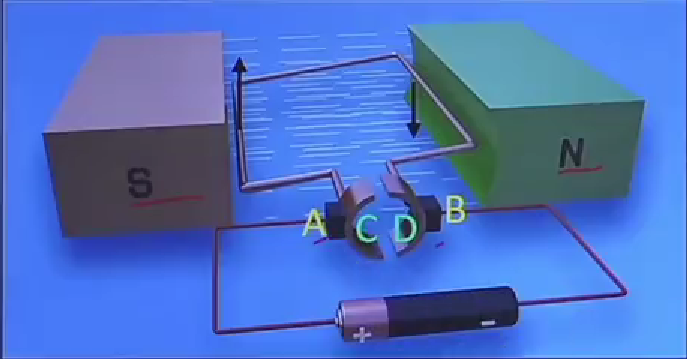
S、N:定子磁极
A、B:电刷
C、D:换向器
线圈:转子绕组
磁场方向:N极到S极
工作过程详见上一章
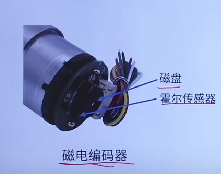
四、测速原理简介-——编码器计数
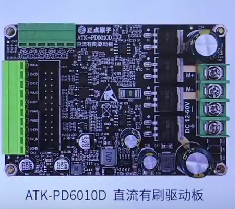
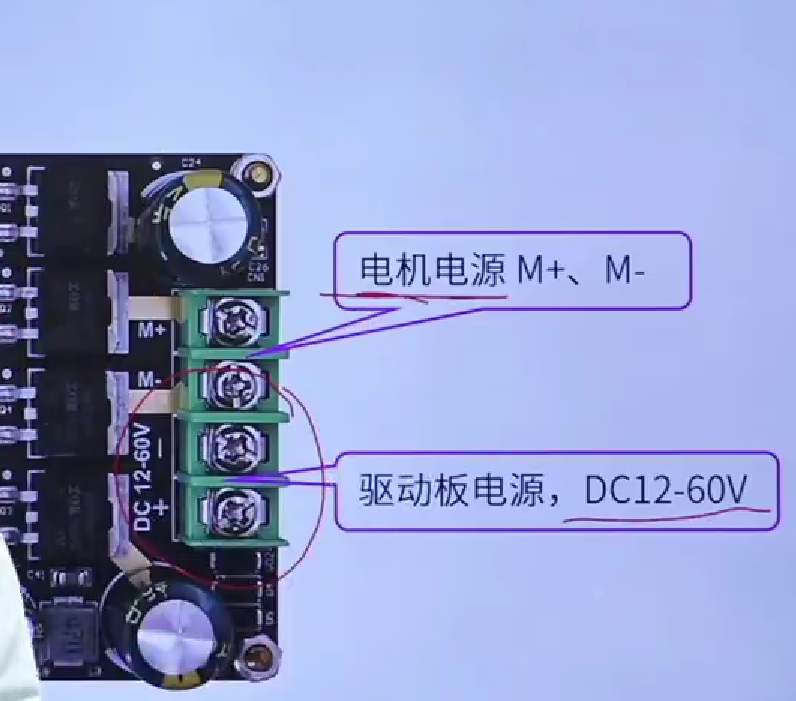
五、直流有刷驱动板
GPIO的电平不可能直接驱动绝大部分电机,必须先给驱动板PWM占空比信号,与驱动板连接的标准驱动电压(建议是电机的额定电压)作用,生成一个占空比不变,高电平明显值上升或又反转的差分PWM波。
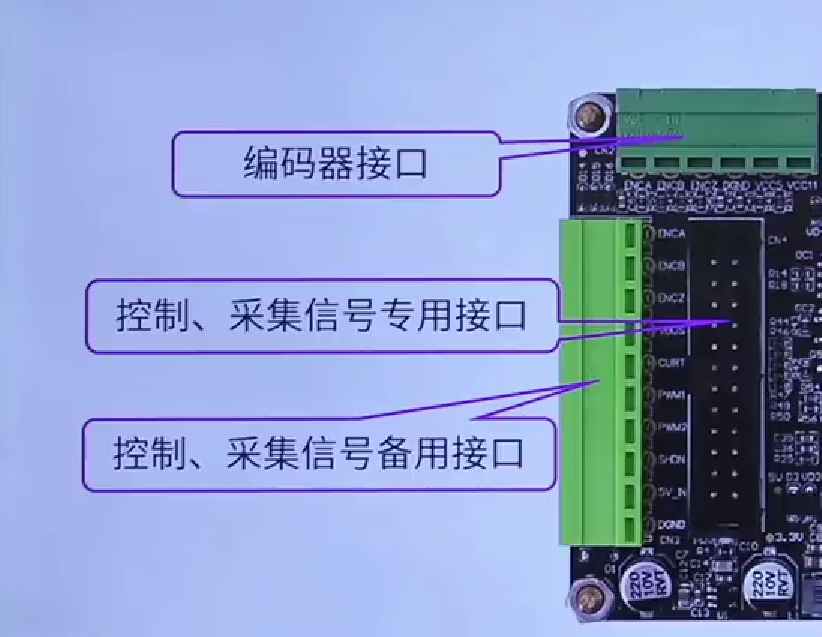
驱动板常见功能:
① 完整的H桥驱动电路
② 电流采集
③ 电压、温度采集
④ 编码器接口
1. H桥驱动原理
H桥电路可以用于控制电机的正反转
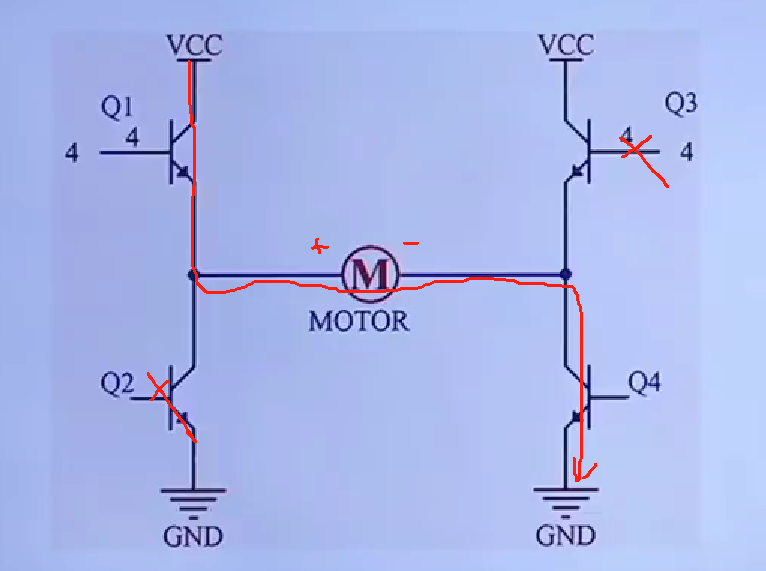
当Q1、Q4导通,Q2、Q3关断,电流流向如上图所示。注意,其实电机本质上不分正负,但是为了区分转向,我们规定了正负极。
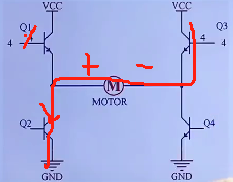
同理,当Q2、Q3导通,Q1、Q4关断,电流流向如图所示。
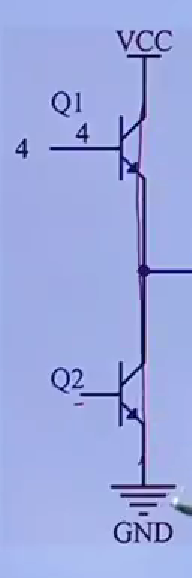
注意:H桥不能上下直通!1、2以及3、4不能同时导通!!!
2. 实际应用中的H桥电路
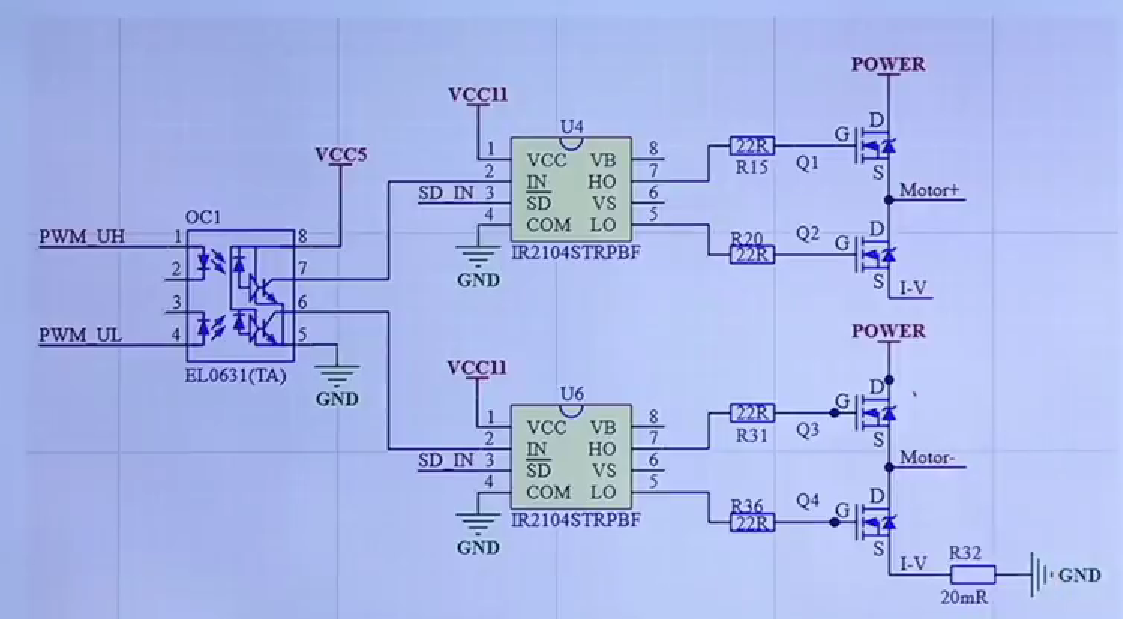
首先我们引入了两路互补的PWM波,经过高速光电耦合芯片RL0631翻转。
接着翻转后的信号分别进入了两个半桥芯片,此时如果SD_IN置0,则输出禁用
具体的IR2104的功能表如下:
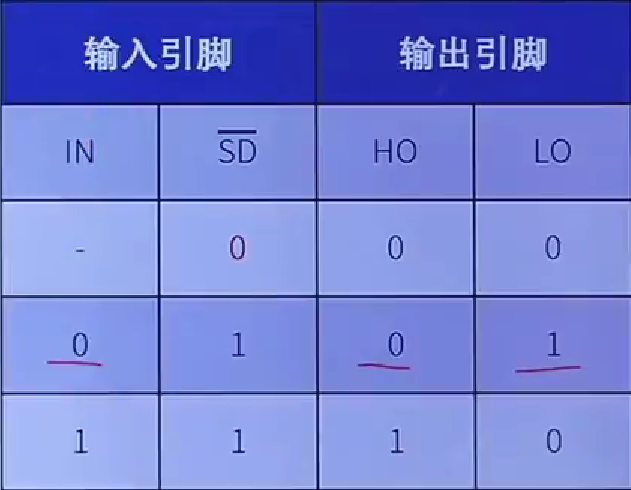
这里不会有输出11的情况,因为11时H桥上下直通!
当IN输入为0时,半桥对应电极与POWER相接。
当IN输入为1时,半桥对应电极与下拉GND相接。
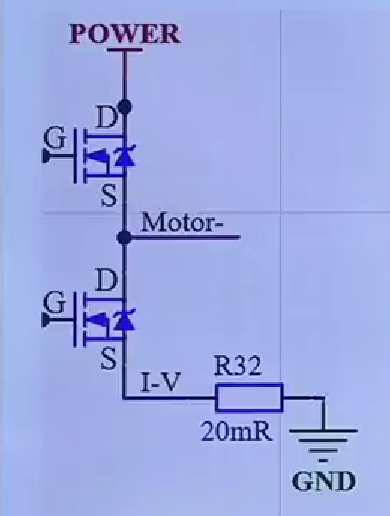
3. 电流采样电路
在电子线路中,测量电压是一件容易的事情。但是如果我们需要测量电流,应该如何操作?
在H桥中,如果要测量输出电流大小,我们可以在桥的导通路线上设置一个比较小的电阻。
为什么要选比较小的?因为电阻阻值越小,电阻就越接近导线,也就能把后续的电流采样电路近似的短路掉,对电气特性影响也就越少。
① 电压采样:I-V= 0.02 * 电流实际值
② 采样电压放大电路:运用模电差分放大器知识,求得纯放大倍数Kob1= 12 / 2 = 6 倍
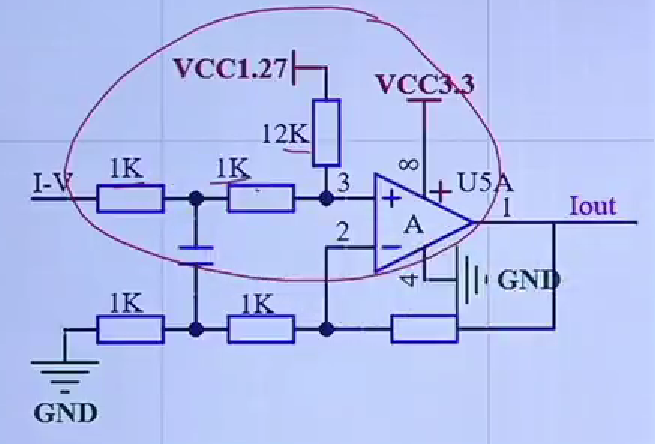
③ 为了避免放大后电压值还是太小,带上参考电压1V27。
Iout = 6 * 0.02 * 实际电流I + 1.27V
④ 采集输出电压计算实际电流 I
I = (输出电压 Iout - 1.27)/0.12
4. 电压采集电路
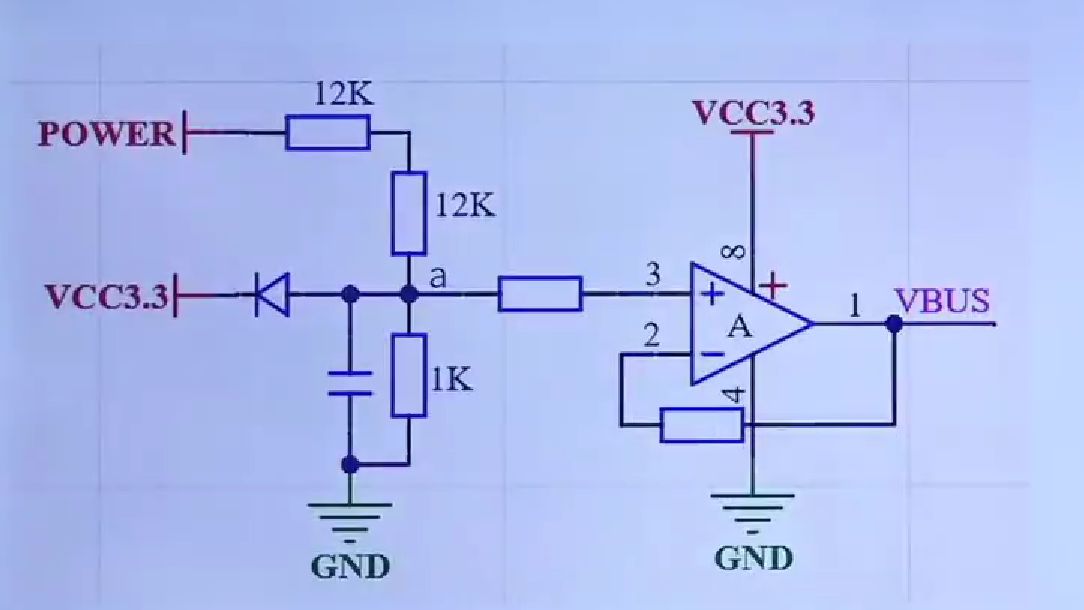
① 直接通过分压原理计算a点电压
②在图示电压跟随器作用下,VBUS跟Va相等
③问题解决
5. 电压采集电路
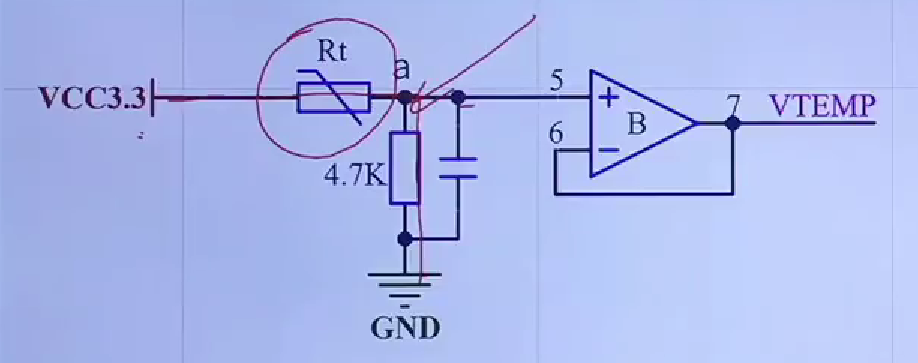
① Va = 4700 / (Rt + 4700) * 3.3V
② 在电压跟随器下VTEMP = Va
以上公式厂家会给,重要的是ADC的使用和滤波,这个后面会讲到。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 8
8 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)