【嵌入式电机控制#3】有刷电机软硬件结合部分(一)
一个IO固定输出,另一个输出PWM。
一、基础驱动功能
1. 电机起停
实现方式:用IO控制SD引脚电平高低
2.电机正反转
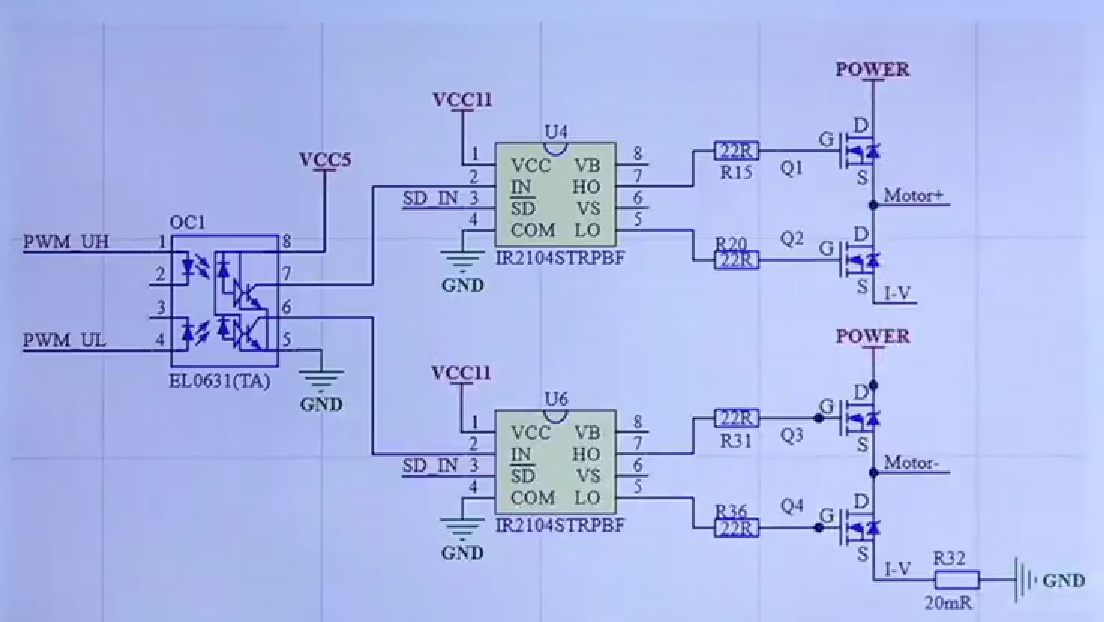
(1)正转:从电机内部看,电流从M-流向M+,反转则相反
(2)实现:给PWM_UH高电平,UL低电平,经过分析可得Motor+接向下拉GND,Motor-接向POWER;从而motor-电流流向motor+;
但是,正反转切换时,需要注意死区时间。幸运的是,咱们的半桥芯片自带死区时间。如果遇到驱动芯片不带死区时间的情况,需要在软件定时器中设置死区时间。
3. 电机调速
默认大家已经学过PWM了,这里不详细讲解,我们主要说正反转下的PWM。首先回顾正反转的规律,上下哪一头输入置1,哪一头motor接GND,由此我们可以得出以下规律。
(1)正转调速
正转下UH置1,UL接0,我们的需求是让motor+保持接GND,让motor-通入一个POWER的方波信号,占空比与输入PWM相同。
那么,我们可以把UL保持为0,UH通入我们的PWM信号,这样下:
当PWM输入波形走到0,电机两端都是接POWER;
当PWM输入波形走到1,电机Motor+接GND,Motor-接POWER;
从而在motor-生成了一个占空比相同,高电平提升的PWM波;
(2)反转调速
反转下UH置0,UL接1,我们的需求是让motor-保持接GND,让motor+通入一个POWER的方波信号,占空比与输入PWM相同。
那么,我们可以把UH保持为0,UL通入我们的PWM信号,这样下:
当PWM输入波形走到0,电机两端都是接POWER;
当PWM输入波形走到1,电机Motor+接POWER,Motor-接GND;
从而在motor+生成了一个占空比相同,高电平提升的PWM波;
总结:一个IO固定输出,另一个输出PWM。
二、硬件资源使用
1. 电机开发板
2. 直流有刷驱动板
3. 直流有刷电机
4. 12V DC 电源
(下一部分我们讲严格的软件初始化与程序设计)

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 3
3 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)