基于STM32的秒表设计
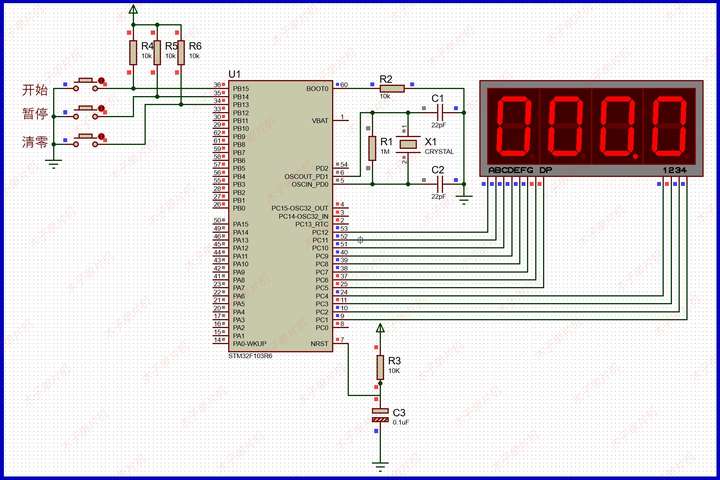
具体功能:1.用三个按键控制秒表开始、暂停、清零;2.用四位数码管显示时间;3.精度0.1秒,最大显示999.9秒;
·
基于STM32的秒表设计
(仿真+程序+设计报告)
功能介绍
具体功能:
1.用三个按键控制秒表开始、暂停、清零;
2.用四位数码管显示时间;
3.精度0.1秒,最大显示999.9秒;
添加图片注释,不超过 140 字(可选)
程序
#include "stm32f10x.h"
#include "main.h"
//定义数码管的引脚
#define SEG_A PC(12)
#define SEG_B PC(11)
#define SEG_C PC(10)
#define SEG_D PC(9)
#define SEG_E PC(8)
#define SEG_F PC(7)
#define SEG_G PC(6)
#define SEG_DP PC(5)
#define SEG1 PC(4)
#define SEG2 PC(3)
#define SEG3 PC(2)
#define SEG4 PC(1)
//定义数按键的引脚
#define K1 PBIN(15)
#define K2 PBIN(14)
#define K3 PBIN(13)
//共阳数码管段码表0-F
const char CAseg_table[16]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e};
//共阴数码管段码表0-F
const char CCseg_table[16]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
u8 Time_count=0;//计时时间
//初始化引脚
void GPIO_Config(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_SetBits(GPIOC,GPIO_Pin_All);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_All);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15|GPIO_Pin_14|GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
//把数值输出到具体的单片机引脚
void Drv_SEG(u8 num)
{
SEG_A=GETVALBIT(num,0);
SEG_B=GETVALBIT(num,1);
SEG_C=GETVALBIT(num,2);
SEG_D=GETVALBIT(num,3);
SEG_E=GETVALBIT(num,4);
SEG_F=GETVALBIT(num,5);
SEG_G=GETVALBIT(num,6);
SEG_DP=GETVALBIT(num,7);
}
//驱动数码管的函数
//mode =0表示共阳,mode=1表示共阴,可以通过这个修改
//m是要显示的数字,比如1.0就是m=10,放大10倍
void Show_num(u16 m)
{
u8 num=0,n=0;
static u8 temp_flag=0;
//数码管消隐
SEG1=0;SEG2=0;SEG3=0;SEG4=0;
switch(temp_flag)
{
case 0://左侧第1位数码管
n=m/1000;//取数据
num=CAseg_table[n];//查询数码管的断码表
Drv_SEG(num);
SEG1=1;//打开数码管显示
temp_flag++;
break;
case 1://左侧第2位数码管
n=m%1000/100;//取数据
num=CAseg_table[n];//查询数码管的断码表
Drv_SEG(num);
SEG2=1;//打开数码管显示
temp_flag++;
break;
case 2://左侧第3位数码管
n=m%100/10;//取数据
num=CAseg_table[n]&0x7f;//查询数码管的断码表
Drv_SEG(num);
SEG3=1;//打开数码管显示
temp_flag++;
break;
case 3://左侧第4位数码管
n=m%10;//取数据
num=CAseg_table[n];//查询数码管的断码表
Drv_SEG(num);
SEG4=1;//打开数码管显示
temp_flag=0;
break;
}
Delay_ms(10);//延时
}
//获取独立按键数据
u8 Get_key_num()
{
u8 temp_key=0;
static u8 flag=0;
if((flag==0)&&((K1==0)||(K2==0)||(K3==0)))
{
flag=1;//按键只获取一次按键数值
SysTick_Delay_Ms(10);//消除抖动
//如果有对应的按键按下就返回对应按键数值
if(K1==0)
{temp_key=1;}
else if(K2==0)
{temp_key=2;}
else if(K3==0)
{temp_key=3;}
}
else if((K1==1)&&(K2==1)&&(K3==1))
{
flag=0;//所有按键都弹起就清除标志
}
return temp_key;
}
*******//完整资料
****//***微信公众号:木子单片机****/
//定时器初始化
void TimInit(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_DeInit(TIM2);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseStructure.TIM_Period = 999; // 10mS
TIM_TimeBaseStructure.TIM_Prescaler = (80-1); // 10uS,这里配合仿真是8M,所以是80,如果是72M那么就是720,仿真没有备倍频
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_PrescalerConfig(TIM2, 80-1, TIM_PSCReloadMode_Immediate); // 10uS,这里配合仿真是8M,所以是80,如果是72M那么就是720,仿真没有备倍频
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM2, ENABLE);
}
//定时器服务函数
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
if(++Time_count>250)Time_count=250;//时间计时
}
}
int main(void)
{
u8 key_num=0;//按键数值
u16 dis_num=0;
u8 mode=0;
GPIO_Config(); //初始化引脚
TimInit(); //初始化定时器
while(1)
{
key_num=Get_key_num();//读取按键
switch(key_num)
{
case 1://开始按键
TIM_Cmd(TIM2, ENABLE);
mode=1;//开始
break;
case 2://暂停按键
TIM_Cmd(TIM2, DISABLE);
mode=2;//暂停
break;
case 3://清除按键
TIM_Cmd(TIM2, DISABLE);
Time_count=0;
dis_num=0;
mode=0;//清除显示
break;
}
if(mode==1)//开始
{
if(Time_count>=10)//每0.1s增加1
{
Time_count=0;
if(++dis_num>9999)dis_num=9999;//最大999.9s
}
}
Show_num(dis_num);//刷新数码管显示
}
}
#include "stm32f10x.h"
#include "bsp_SysTick.h"
//下面是定义STM32单片机各个引脚的地址,便于以后操作
#define PA_ODR (0x40010800+0x0C)
#define PA_IDR (0x40010800+0x08)
#define PA(BitNo) *(volatile unsigned long *)( (0x42000000 + ((PA_ODR-0x40000000)*8 + BitNo)*4 ) )
#define PAIN(BitNo) *(volatile unsigned long *)( (0x42000000 + ((PA_IDR-0x40000000)*8 + BitNo)*4 ) )
#define PB_ODR (0x40010C00+0x0C)
#define PB_IDR (0x40010C00+0x08)
#define PB(BitNo) *(volatile unsigned long *)( (0x42000000 + ((PB_ODR-0x40000000)*8 + BitNo)*4 ) )
#define PBIN(BitNo) *(volatile unsigned long *)( (0x42000000 + ((PB_IDR-0x40000000)*8 + BitNo)*4 ) )
#define PC_ODR (0x40011000+0x0C)
#define PC_IDR (0x40011000+0x08)
#define PC(BitNo) *(volatile unsigned long *)( (0x42000000 + ((PC_ODR-0x40000000)*8 + BitNo)*4 ) )
#define PCIN(BitNo) *(volatile unsigned long *)( (0x42000000 + ((PC_IDR-0x40000000)*8 + BitNo)*4 ) )
#define PD_ODR (0x40011400+0x0C)
#define PD_IDR (0x40011400+0x08)
#define PD(BitNo) *(volatile unsigned long *)( (0x42000000 + ((PD_ODR-0x40000000)*8 + BitNo)*4 ) )
#define PDIN(BitNo) *(volatile unsigned long *)( (0x42000000 + ((PD_IDR-0x40000000)*8 + BitNo)*4 ) )
#define PE_ODR (0x40011800+0x0C)
#define PE_IDR (0x40011800+0x08)
#define PE(BitNo) *(volatile unsigned long *)( (0x42000000 + ((PE_ODR-0x40000000)*8 + BitNo)*4 ) )
#define PEIN(BitNo) *(volatile unsigned long *)( (0x42000000 + ((PE_IDR-0x40000000)*8 + BitNo)*4 ) )
#define SETBIT(VAR,Place) ( VAR |= (1<<Place) ) //置位某位变量
#define CLRBIT(VAR,Place) ( VAR &= ((1<<Place)^0xffff) ) //清除置位
#define VALBIT(VAR,Place) (VAR & (1<<Place)) //查询某一位
#define GETVALBIT(VAR,Place) ((VAR & (1<<Place))>>Place) //查询某一位并转为第0位
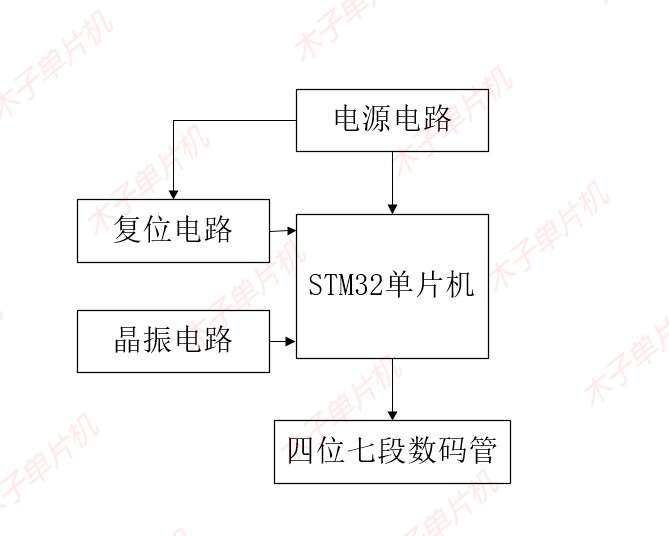
硬件设计
使用元器件:
单片机:STM32F103;
添加图片注释,不超过 140 字(可选)
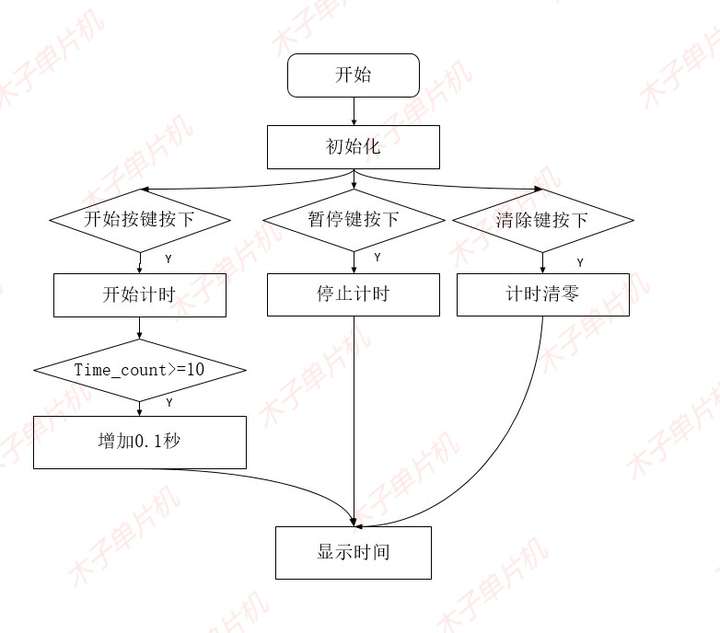
流程图:
添加图片注释,不超过 140 字(可选)
设计资料
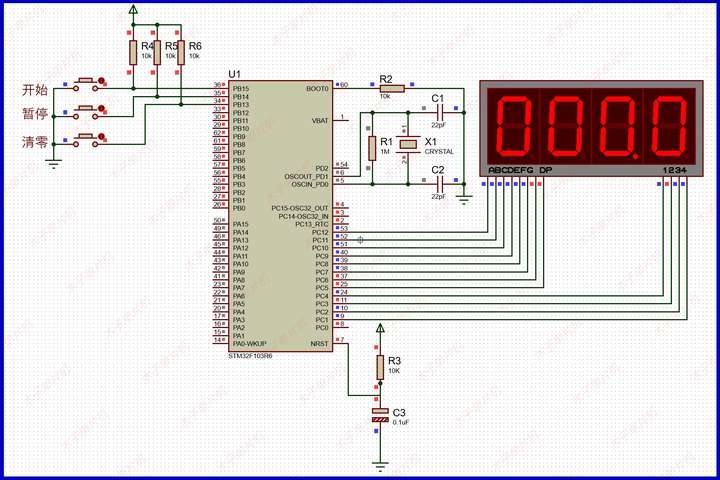
01仿真图
本设计使用proteus8.9版本设计!具体如图!
添加图片注释,不超过 140 字(可选)
02程序
本设计使用Keil5 MDK版本编程设计!具体如图!
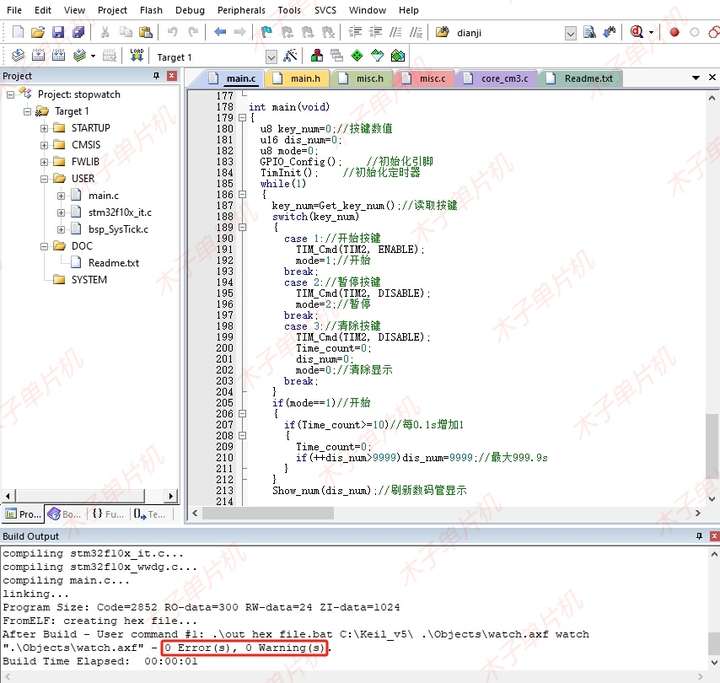
添加图片注释,不超过 140 字(可选)
03设计报告
八千字设计报告,具体如下!
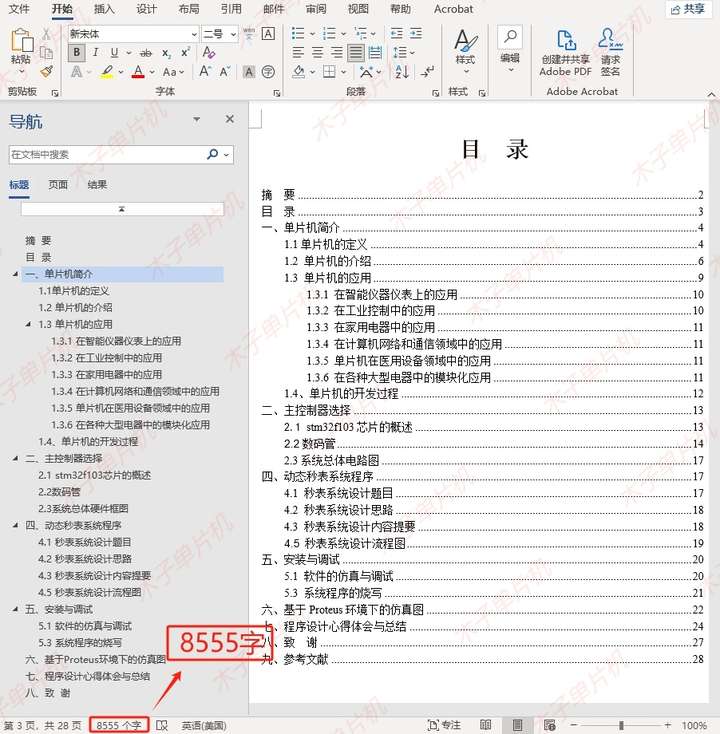
添加图片注释,不超过 140 字(可选)
04设计资料
全部资料包括程序(含注释)、仿真源文件 、设计报告、流程图等。具体内容如下,全网最全! !
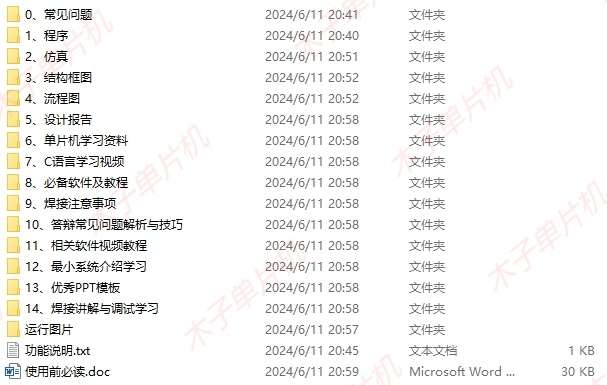
添加图片注释,不超过 140 字(可选)
点赞分享一起学习成长。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 5
5 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)