STM32之定时器的应用四:编码器测速
·
一、编码器接口介绍
1.编码器接口
编码器接口可接收增量(正交)编码器的信号,根据编码器旋转产生的正交信号脉冲,自动控制CNT自增或自减,从而指示编码器的位置、旋转方向和旋转速度;每个高级定时器和通用定时器都拥有1个编码器接口;两个输入引脚借用了输入捕获的通道1和通道2
正交编码器:
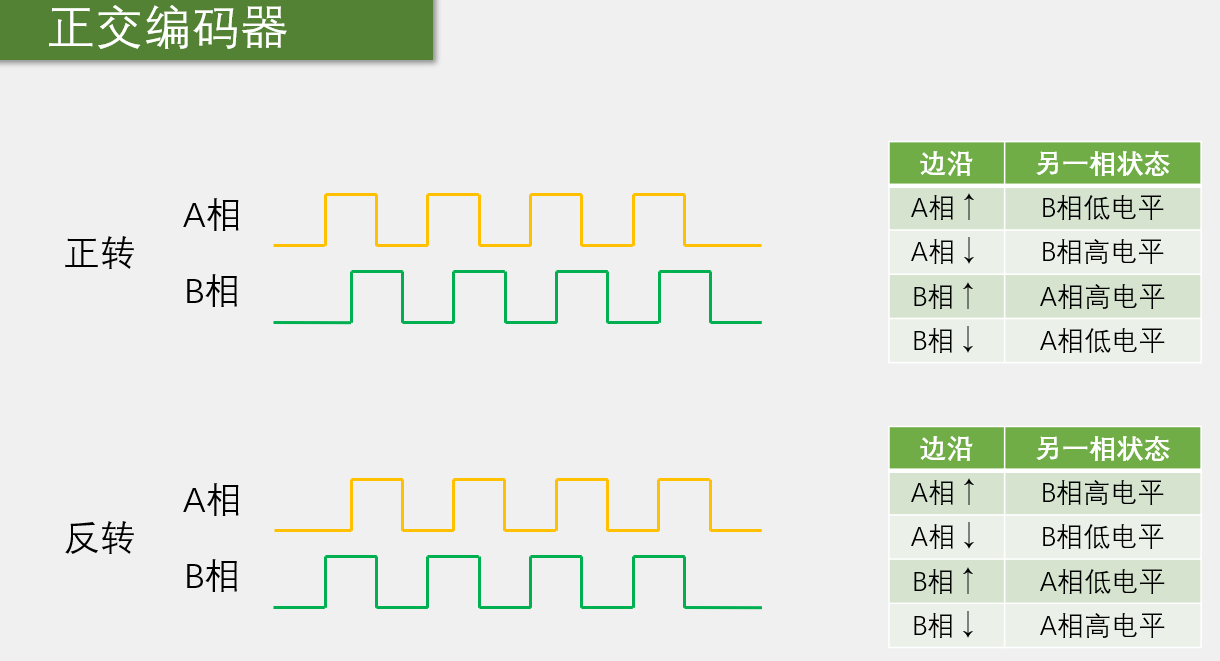
编码器接口的基本编程结构:
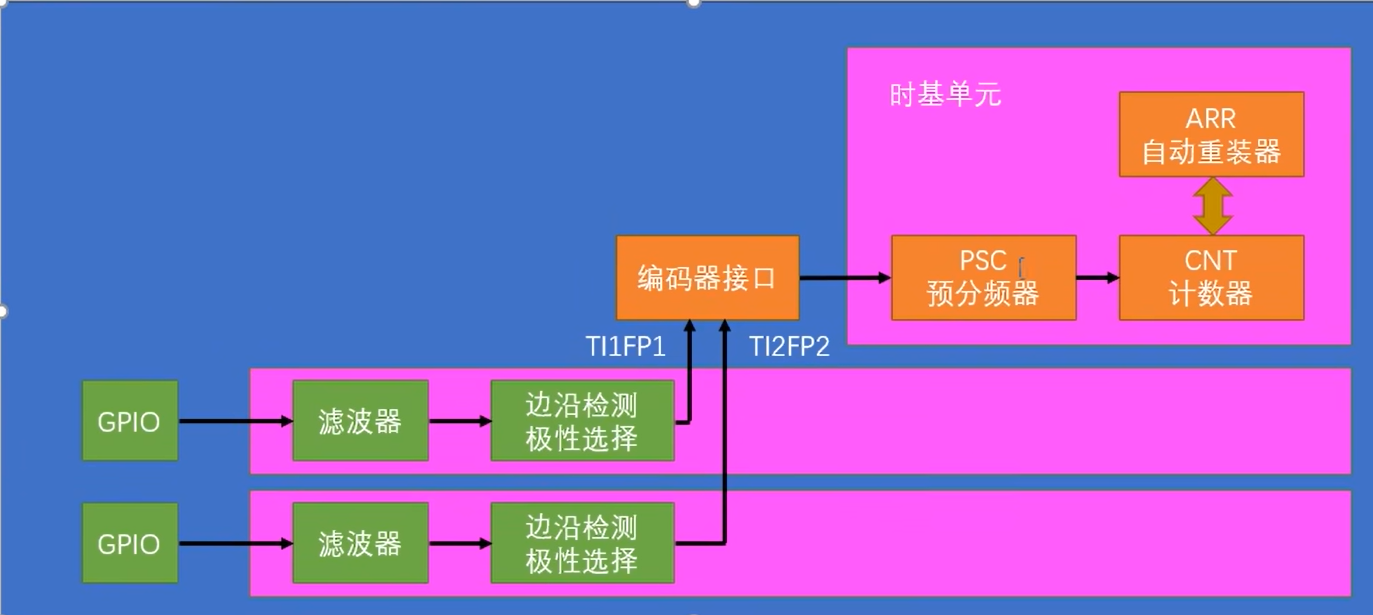
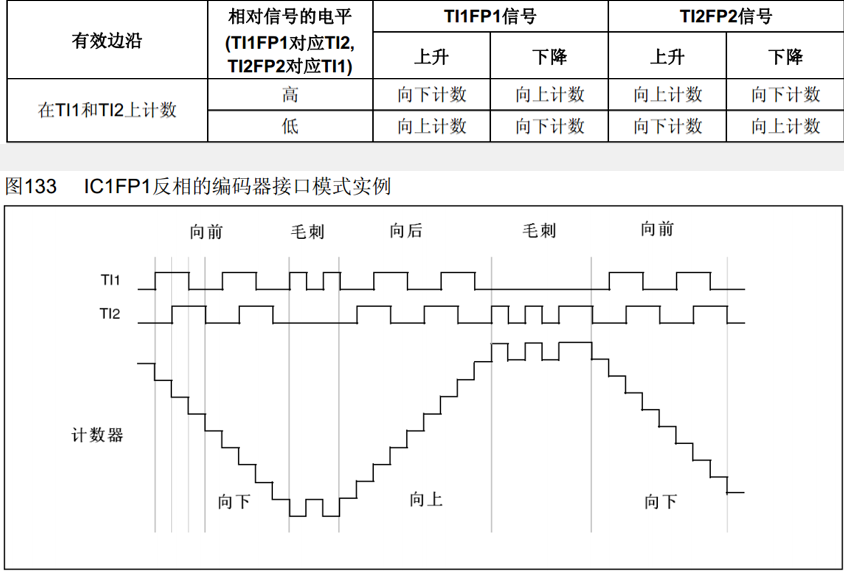
编码器接口工作逻辑
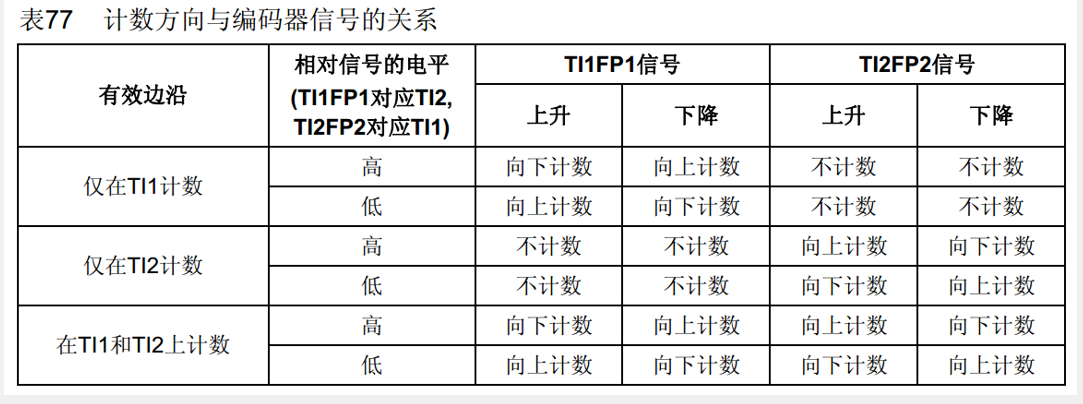
作用过程:
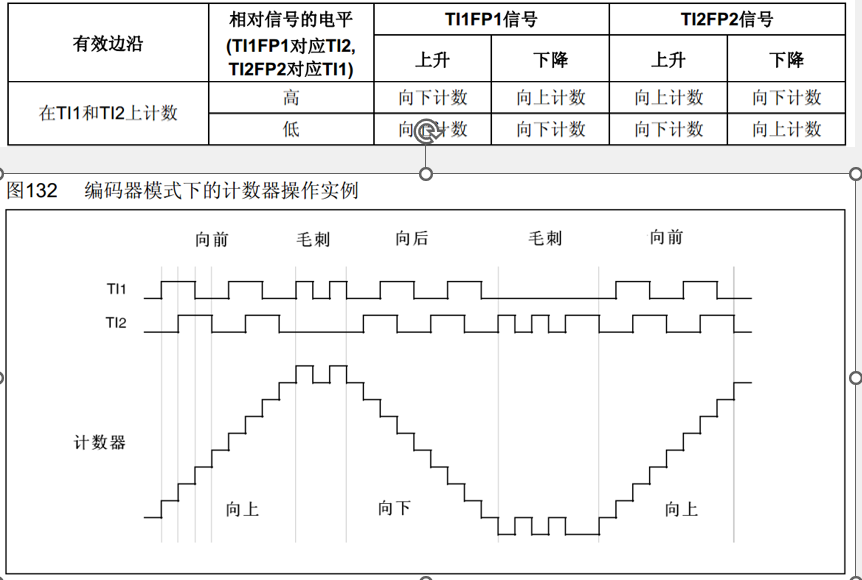
反向计数方式:
二、编码器测速
配置:
#include "stm32f10x.h" // Device header
void Encoder_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设定为复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7 ;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//2.TIM初始化
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
//(1)PWM频率:Freq = CK_PSC / (PSC +1) / (ARR +1)
//(2)PWM占空比:Duty=CCR/(ARR+1)
//(3)PWM分辨率:Reso=1/(ARR+1)
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //用于采样电路的分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//定时器计数方式:上、下、中央对其
TIM_TimeBaseInitStructure.TIM_Period = 65536-1;//ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 1-1;//PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器,只在高级计数器中使用
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
//3.初始化输入捕获单元
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;//通道一
TIM_ICInitStructure.TIM_ICFilter = 0xF;
TIM_ICInit(TIM3,&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;//通道二
TIM_ICInitStructure.TIM_ICFilter = 0xF;
TIM_ICInit(TIM3,&TIM_ICInitStructure);
TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising );
TIM_Cmd(TIM3,ENABLE);
}
int16_t Get_Encoder(void)
{
int16_t Temp;
Temp = TIM_GetCounter(TIM3);
TIM_SetCounter(TIM3,0);
return Temp;
}
一秒定时器中断:
#include "stm32f10x.h" // Device header
void Timer_Init(void)
{
//TIM初始化
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //用于采样电路的分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//定时器计数方式:上、下、中央对其
TIM_TimeBaseInitStructure.TIM_Period = 10000-1;//ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200-1;//PSC 计时=(ARR-1)*(PSC-1)/主频=1S
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器,只在高级计数器中使用
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
TIM_ClearFlag(TIM2,TIM_FLAG_Update);//手动清除中断标志位,避免一开始就进入中断的问题
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
//NVIC初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2, ENABLE);
}
主函数:
#include "stm32f10x.h" // Device header
#include "OLED.h"
#include "Matrix_Key.h"
#include "LED.h"
#include "Delay.h"
#include "Timer.h"
#include "Encoder.h"
int16_t Speed;
int main(void)
{
Encoder_Init();
Timer_Init();
OLED_Init();
OLED_ShowString(1,1,"Speed:");
while(1)
{
OLED_ShowSignedNum(1,7,Speed,5);//编码器测量位置
}
}
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2,TIM_IT_Update)==SET)
{
Speed = Get_Encoder();
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
}
}
测速原理:在一秒的定时器中断内,对脉冲数Temp进行计数,即为速度
若要完成编码器测速,还需要关注减速比、4倍频、转换在一分钟内测速等,且由于电机转速较快,需要减少中断时间保证测速的准确性

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 6
6 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)