【STM32定时器】实验1:定时器基本用法(CuBeMX版)+启动函数解析
摘要: 本实验通过STM32基本定时器TIM6实现毫秒级延时函数。使用CuBeMX配置时钟源(84MHz)、TIM6定时器(1ms中断周期)和串口通信(用于验证)。关键步骤包括:1)配置定时器参数和中断使能;2)调用HAL_TIM_Base_Start_IT()启动定时器;3)解析底层寄存器操作原理(如CR1寄存器的CEN位控制)。实验展示了如何利用HAL库实现硬件定时功能,并通过宏定义详解了寄存
Timer实验1:定时器基本用法(CuBeMX版)+启动函数解析
文章目录
1、实验目的
自制一个毫秒级的延时函数:定义一个全局变量,配置基本定时器为1毫秒的中断,在中断中对此全局变量累加,即可实现毫秒级计时。同时为了验证延时效果,配置串口输出。
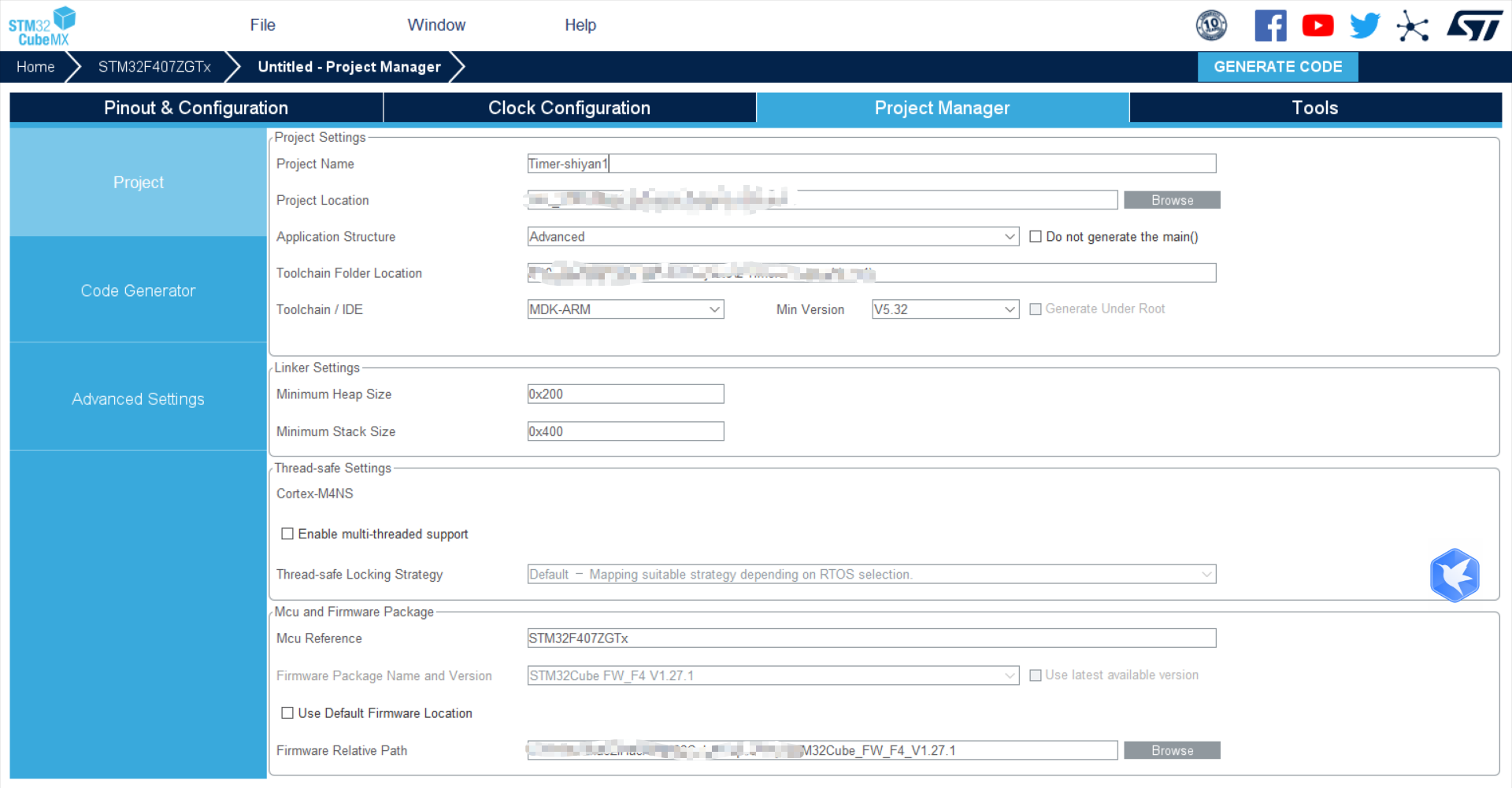
2、配置CuBeMX
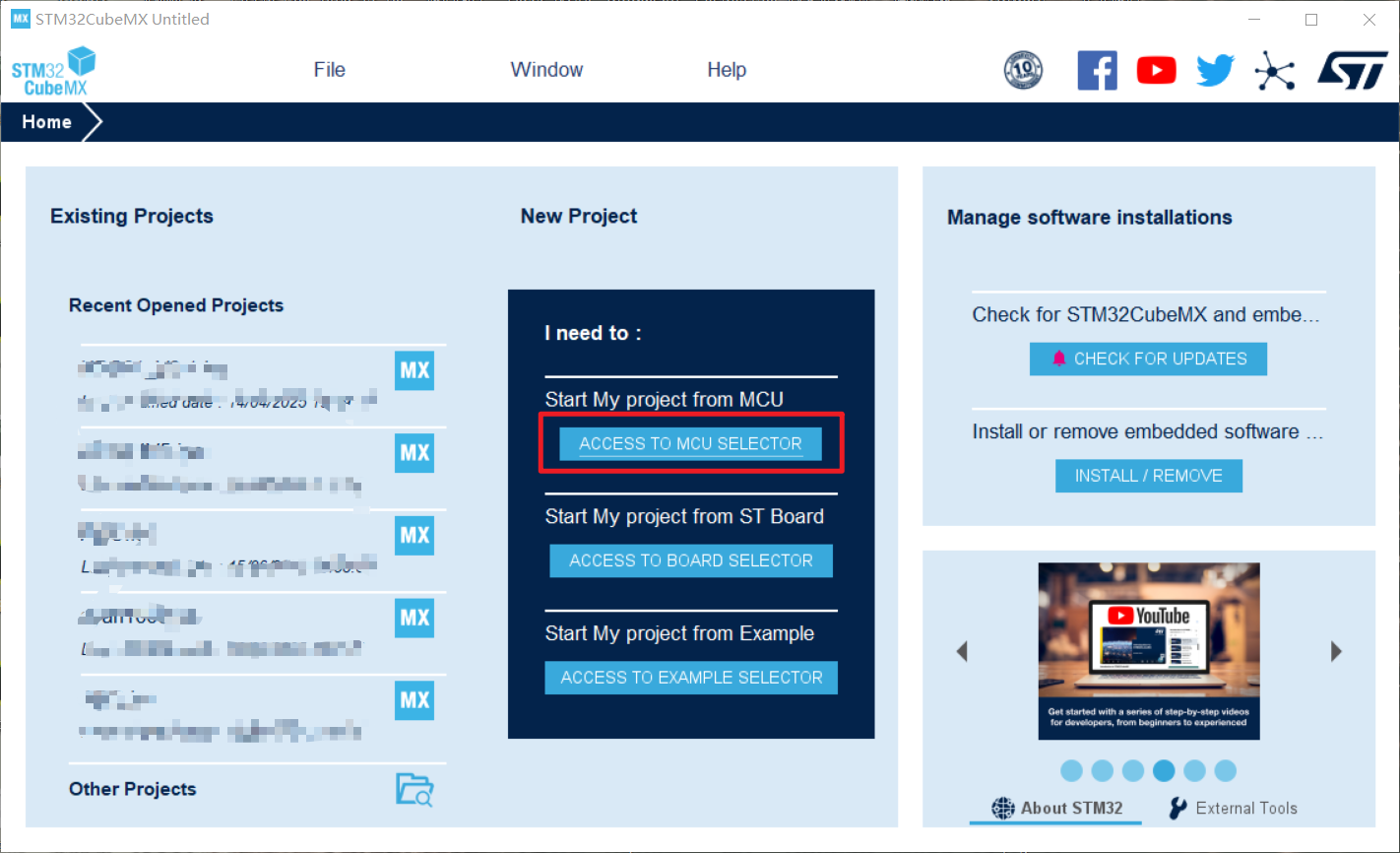
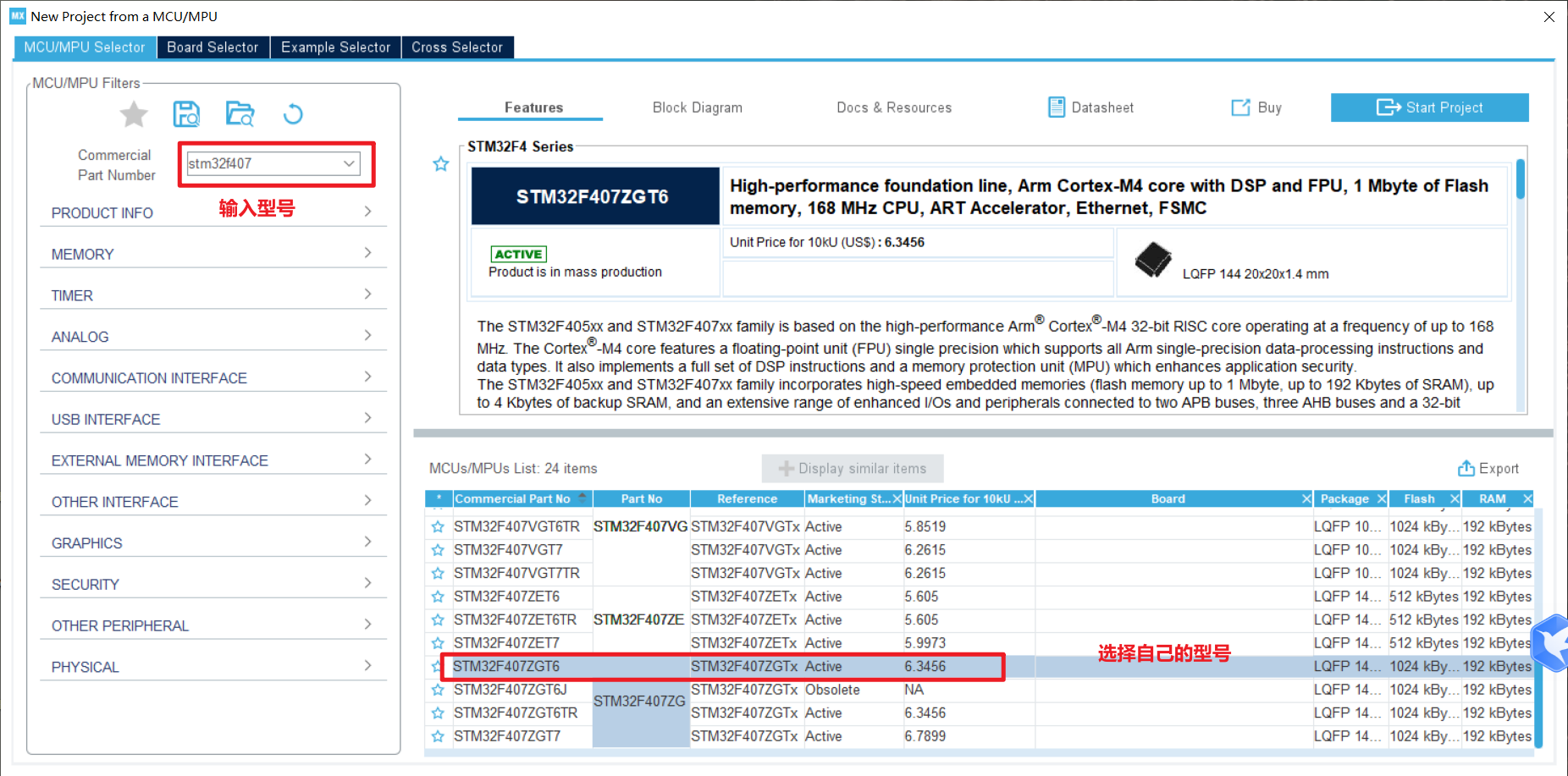
1)选择MCU
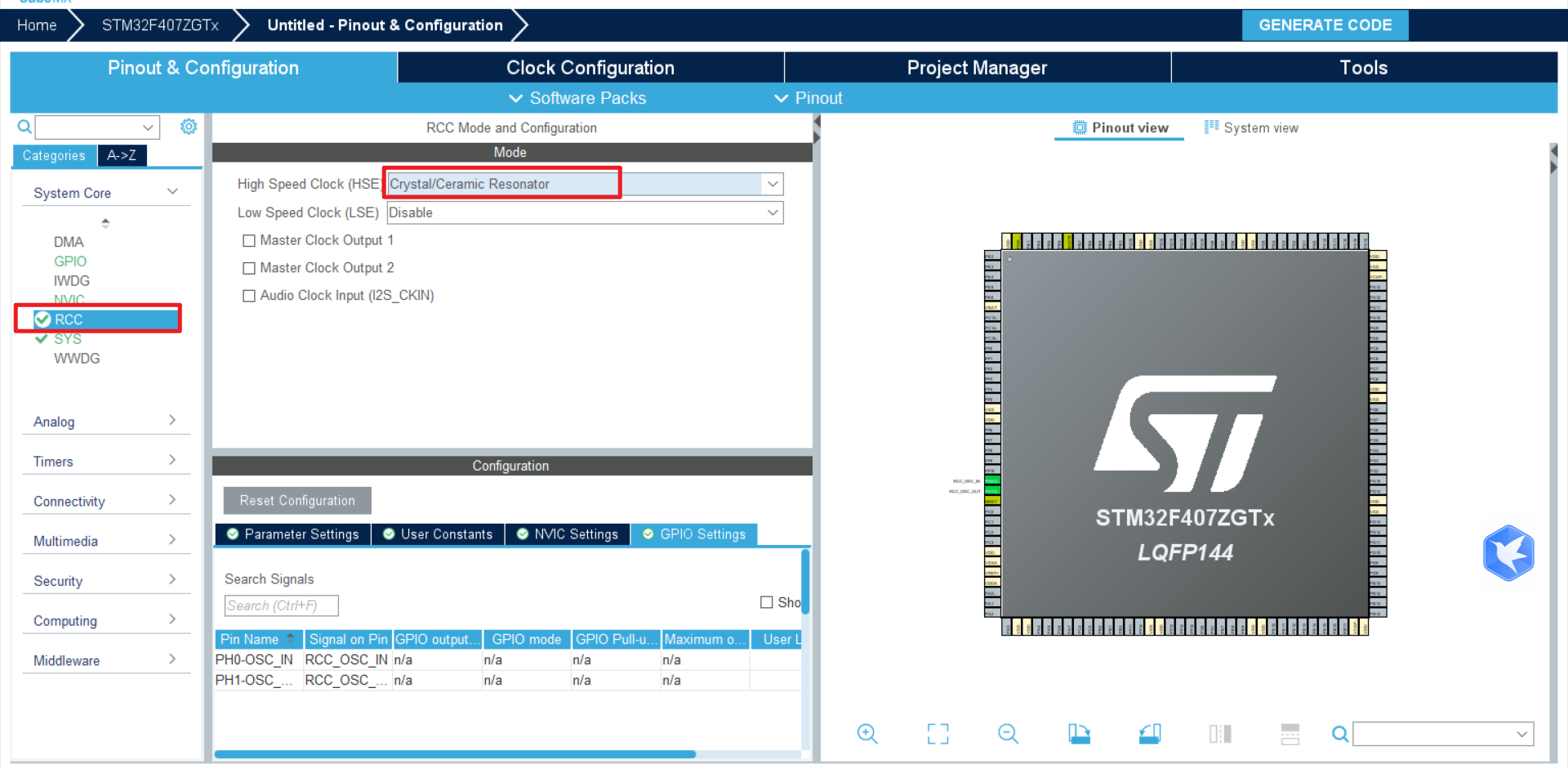
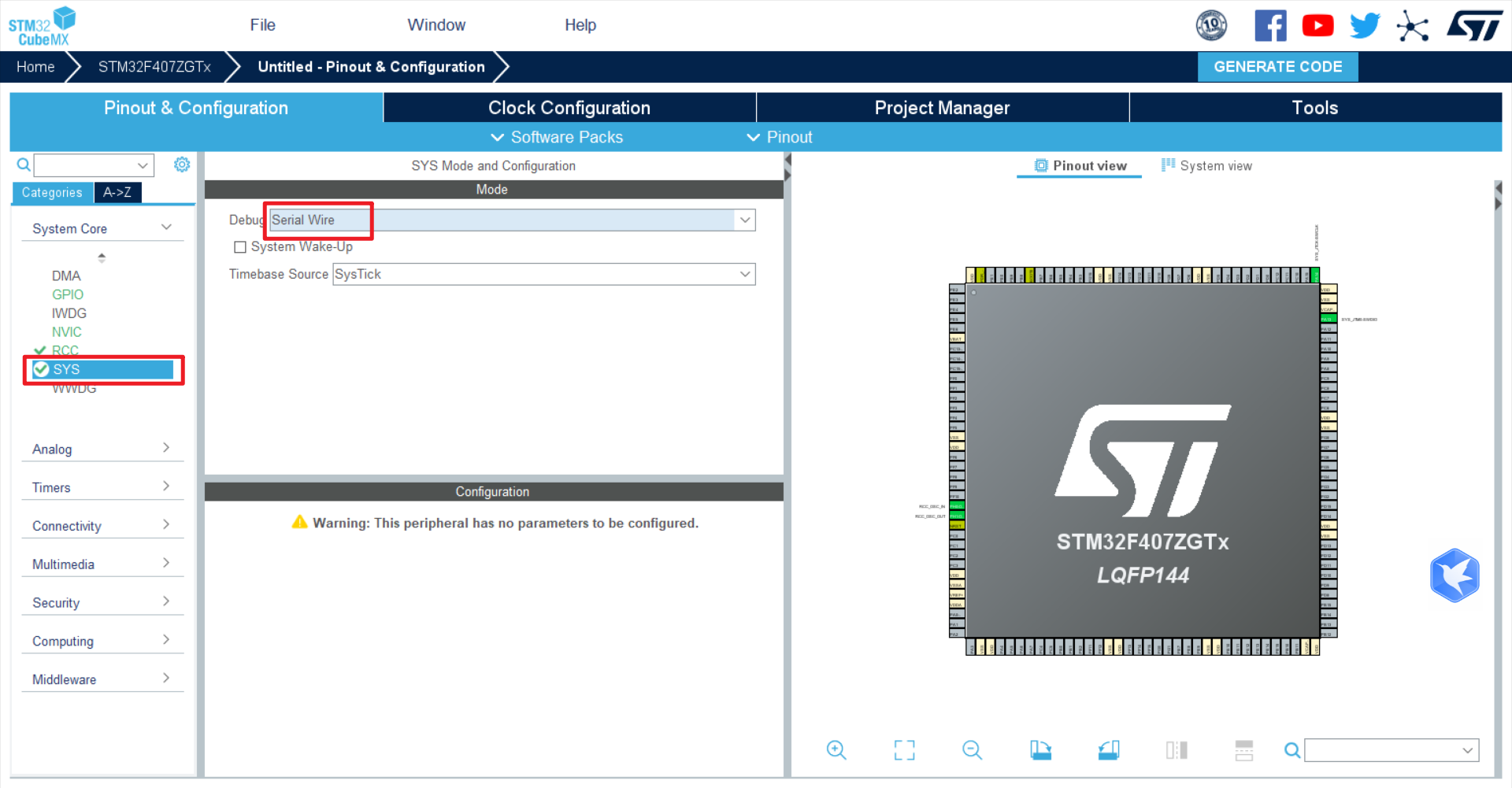
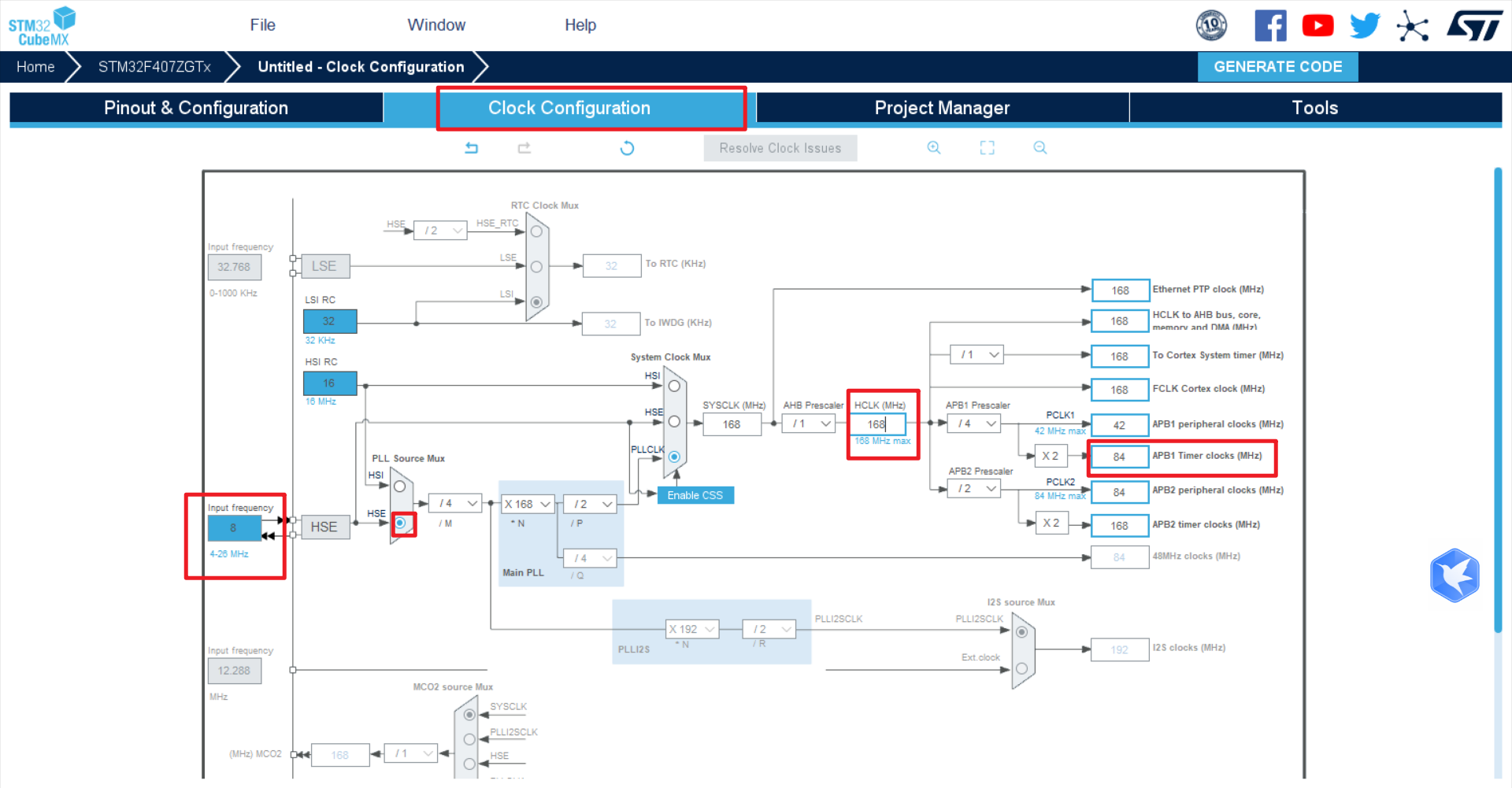
2)配置时钟和Debug
3)配置定时器
本实验使用基本定时器TIM6,挂载在APB1总线上,配置为84MHz
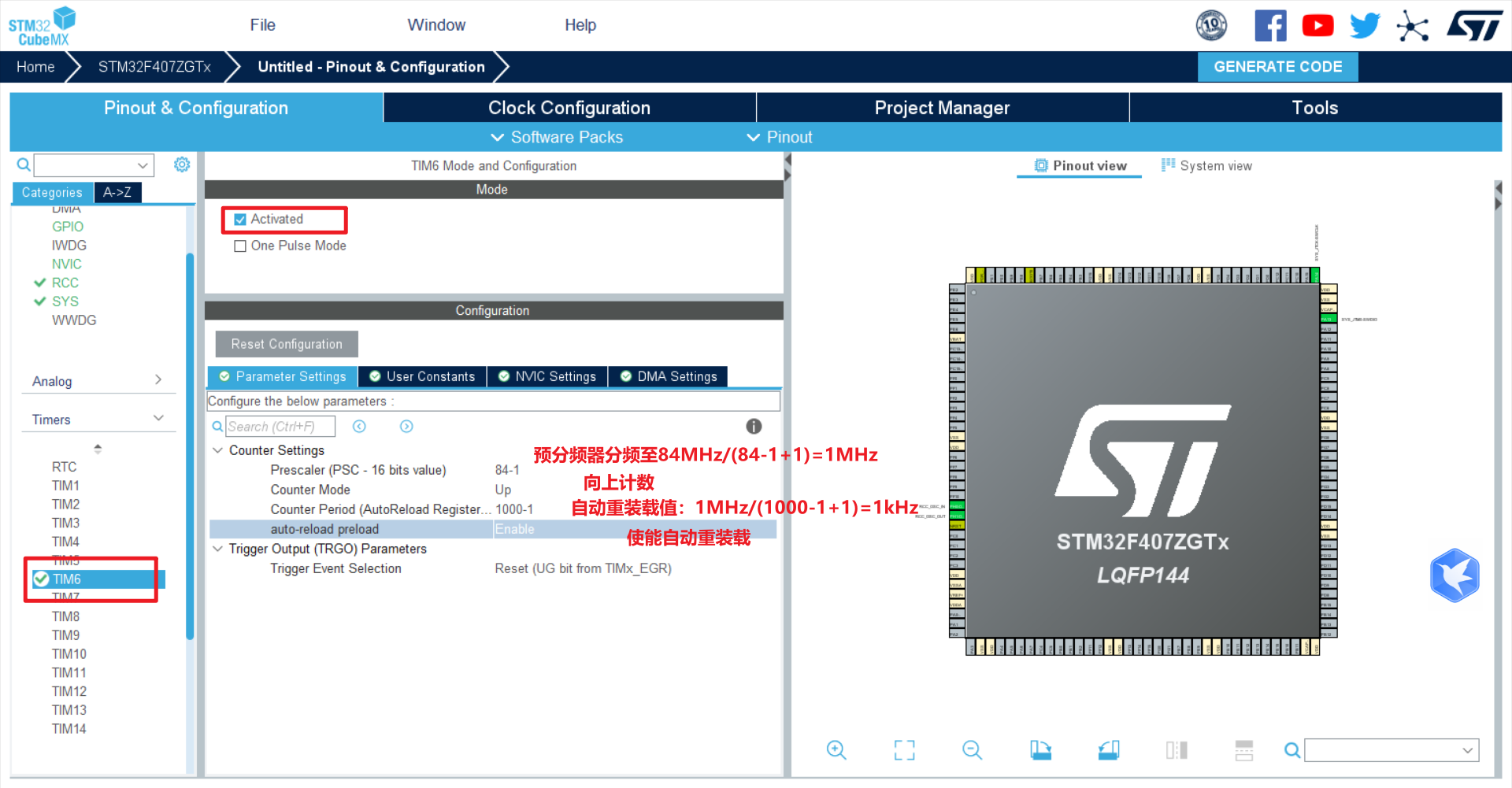
由上配置可以得到定时器周期1ms
有关定时器的详细介绍,请见:【STM32学习笔记】Timer总结:从模式控制器、时基单元、输入捕获、输出比较
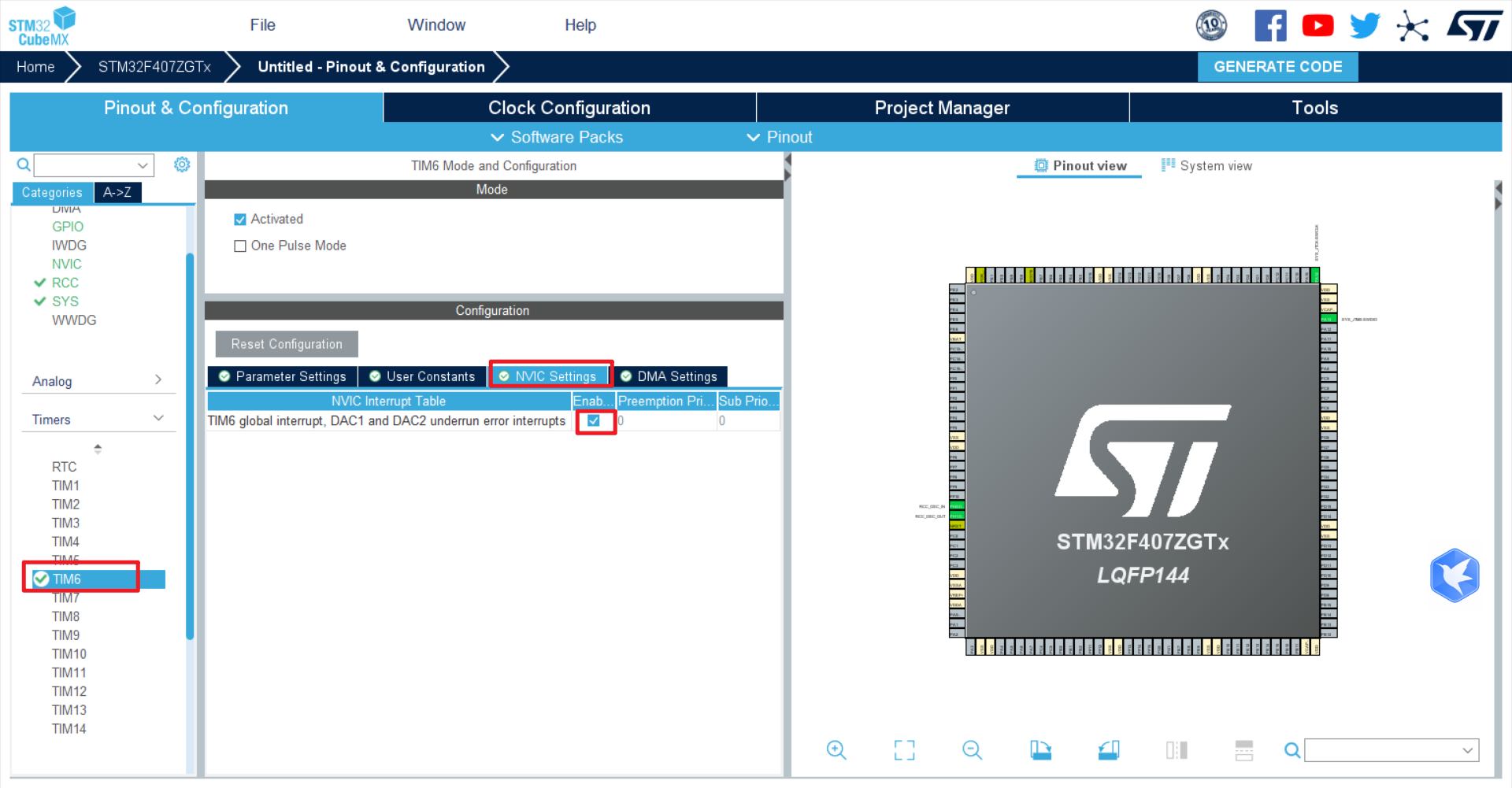
4)开启中断
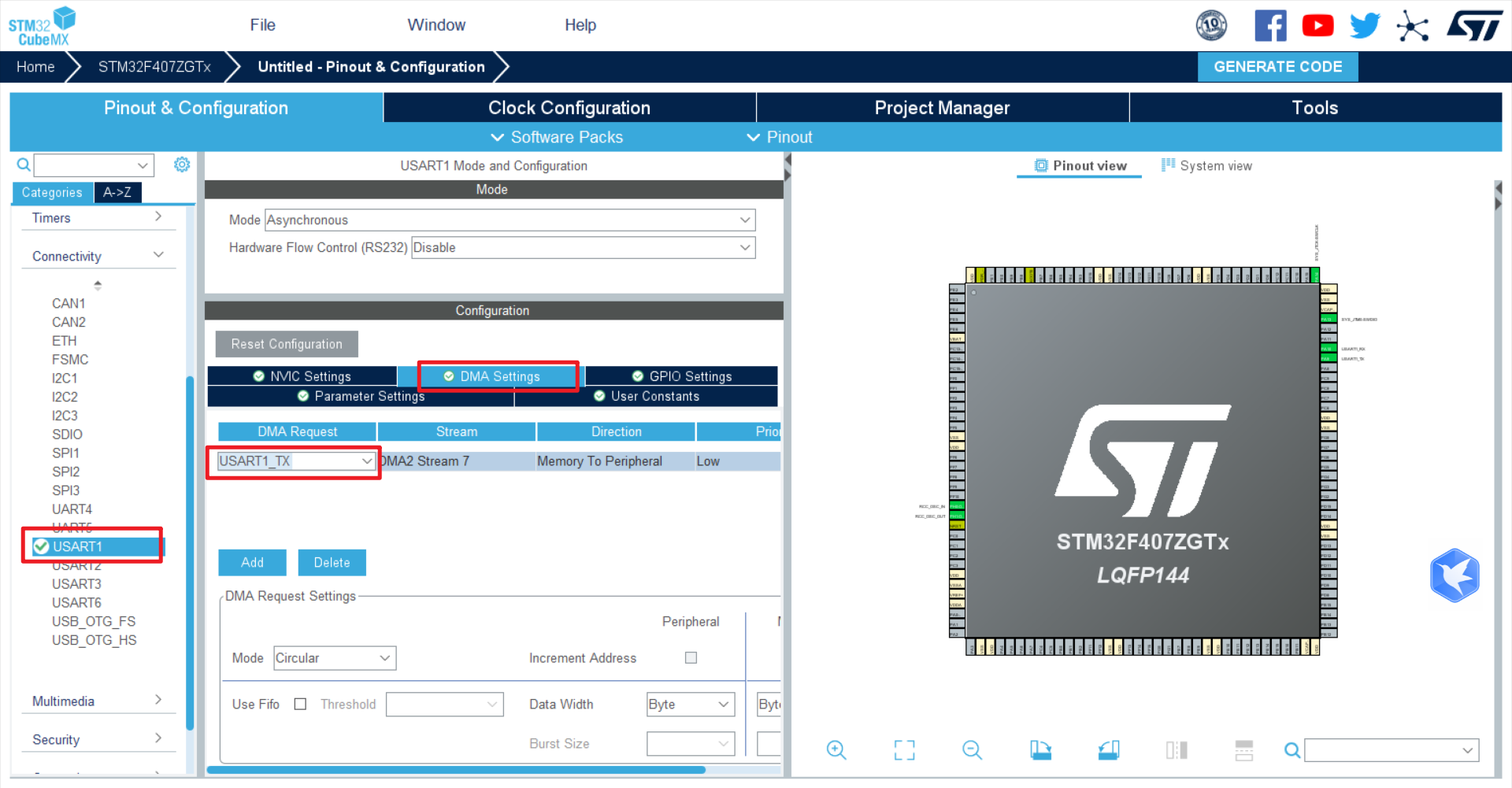
5)配置串口
有关串口更详细的介绍,请见:【STM32学习笔记】串口总结:串口轮询模式、串口中断模式、串口DMA模式以及串口接收不定长数据
6)配置路径生成代码
3、定时器相关语句
定时器启动函数相关
HAL_StatusTypeDef HAL_TIM_Base_Start_IT(TIM_HandleTypeDef *htim)
/*
1、参数htim:外设定时器句柄的指针
2、返回值:(成功还是失败)
typedef enum
{
HAL_OK = 0x00U, //成功
HAL_ERROR = 0x01U, //失败
HAL_BUSY = 0x02U, //串口忙
HAL_TIMEOUT = 0x03U //接收超时
} HAL_StatusTypeDef;
只会返回前两个值
*/
在HAL_TIM_Base_Start_IT函数中,会使能定时器更新中断和使能定时器
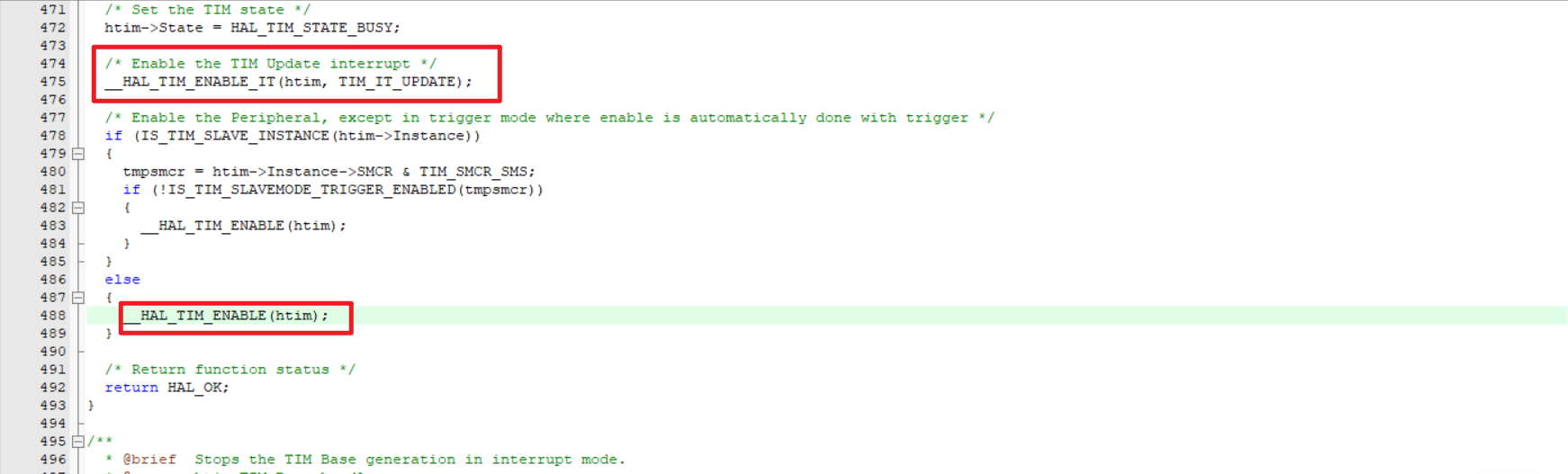
启动定时器函数__HAL_TIM_ENABLE的具体形式为以下宏定义,它的作用是将定时器的控制寄存器 1 (CR1) 中的计数器使能位 (CEN, Counter ENable) 置 1。
/**
* @brief Enable the TIM peripheral.
* @param __HANDLE__ TIM handle
* @retval None
*/
#define __HAL_TIM_ENABLE(__HANDLE__) ((__HANDLE__)->Instance->CR1|=(TIM_CR1_CEN))
- 寄存器级操作: 这是最底层的、直接操作硬件寄存器的指令。效率极高。
- 仅设置 CEN 位: 它只负责设置 CEN 位来启动计数。不会自动配置定时器的其他参数(如时钟源、预分频器 PSC、重装载值 ARR、比较 值 CCRx、中断/DMA 使能、输出模式等)。这些配置通常在调用 HAL_TIM_Base_Init(), HAL_TIM_Base_Start_IT(), HAL_TIM_PWM_Start() 等函数时已经完成。__HAL_TIM_ENABLE 是这些更高级启动函数内部最终执行的核心操作。
- 参数 HANDLE: 必须是一个有效且已初始化(通常通过 HAL_TIM_Base_Init 或类似函数初始化过)的 TIM_HandleTypeDef 结构体指针。这个结构体包含了指向目标定时器寄存器块 (Instance) 的指针以及其他配置信息。
- TIM_CR1_CEN 常量: 这个值由 ST 的 HAL 库提供,确保了代码在不同 STM32 系列之间的可移植性(即使不同系列定时器寄存器地址不同,宏的使用方式不变)。
下面介绍TIM_CR1_CEN 常量,在代码中找到其定义如下:
/******************************************************************************/
/* */
/* TIM */
/* */
/******************************************************************************/
/******************* Bit definition for TIM_CR1 register ********************/
#define TIM_CR1_CEN_Pos (0U)
#define TIM_CR1_CEN_Msk (0x1UL << TIM_CR1_CEN_Pos) /*!< 0x00000001 */
#define TIM_CR1_CEN TIM_CR1_CEN_Msk /*!<Counter enable */
1.
#define TIM_CR1_CEN_Pos (0U)
作用:定义 CEN 位在 CR1 寄存器中的位位置 (Position)。
解释:
0U表示该位位于寄存器的 第 0 位 (最低有效位,LSB)。
U后缀表示这是一个无符号整型 (unsigned integer) 常量。意义:这告诉你 CEN 标志在 CR1 寄存器中的物理位置是 bit 0。
2.
#define TIM_CR1_CEN_Msk (0x1UL << TIM_CR1_CEN_Pos)
作用:定义 CEN 位的位掩码 (Bit Mask)。
分解:
0x1UL:十六进制值 1,UL后缀表示 无符号长整型 (unsigned long)。这确保数值在32位系统上有正确的宽度。
<< TIM_CR1_CEN_Pos:将0x1UL左移TIM_CR1_CEN_Pos位 (即左移 0 位)。结果:
0x1UL << 0 = 0x00000001(32位掩码)。意义:创建一个掩码,其中只有 CEN 位 (bit 0) 为 1,其他所有位 (bit 1 到 31) 为 0。这是用于操作该位的核心掩码。
3.
#define TIM_CR1_CEN TIM_CR1_CEN_Msk
作用:为 CEN 位定义一个易记的标识符。
解释:
将
TIM_CR1_CEN直接定义为TIM_CR1_CEN_Msk的值 (0x00000001)。意义:提供简洁明了的名称 (
TIM_CR1_CEN) 来代表 CEN 位的掩码,提高代码可读性。
使能定时器中断函数__HAL_TIM_ENABLE_IT(HANDLE, INTERRUPT)定义如下:
/** @brief Enable the specified TIM interrupt.
* @param __HANDLE__ specifies the TIM Handle.
* @param __INTERRUPT__ specifies the TIM interrupt source to enable.
* This parameter can be one of the following values:
* @arg TIM_IT_UPDATE: Update interrupt
* @arg TIM_IT_CC1: Capture/Compare 1 interrupt
* @arg TIM_IT_CC2: Capture/Compare 2 interrupt
* @arg TIM_IT_CC3: Capture/Compare 3 interrupt
* @arg TIM_IT_CC4: Capture/Compare 4 interrupt
* @arg TIM_IT_COM: Commutation interrupt
* @arg TIM_IT_TRIGGER: Trigger interrupt
* @arg TIM_IT_BREAK: Break interrupt
* @retval None
*/
#define __HAL_TIM_ENABLE_IT(__HANDLE__, __INTERRUPT__) ((__HANDLE__)->Instance->DIER |= (__INTERRUPT__))
具体中断形式如以上代码中简介,具体到寄存器就不再展开,大家可以顺藤摸瓜,参照源码和手册进行学习。
操作相关寄存器函数
__HAL_TIM_SET_COUNTER
__HAL_TIM_GET_COUNTER
__HAL_TIM_SET_AUTORELOAD
__HAL_TIM_GET_AUTORELOAD
__HAL_TIM_SET_PRESCALER
/**
* @brief Set the TIM Counter Register value on runtime.
* @param __HANDLE__ TIM handle.
* @param __COUNTER__ specifies the Counter register new value.
* @retval None
*/
#define __HAL_TIM_SET_COUNTER(__HANDLE__, __COUNTER__) ((__HANDLE__)->Instance->CNT = (__COUNTER__))
用于在运行时设置定时器(TIM)的计数器寄存器(Counter Register)的值
HANDLE:指向定时器句柄的指针(如 &htim1)。该句柄包含定时器的配置信息和寄存器基地址(通过 Instance 成员访问)。
COUNTER:要设置的计数器新值(16位或32位整数,取决于定时器位数)。
/**
* @brief Get the TIM Counter Register value on runtime.
* @param __HANDLE__ TIM handle.
* @retval 16-bit or 32-bit value of the timer counter register (TIMx_CNT)
*/
#define __HAL_TIM_GET_COUNTER(__HANDLE__) ((__HANDLE__)->Instance->CNT)
和上面获取类似,不展开
/**
* @brief Set the TIM Autoreload Register value on runtime without calling another time any Init function.
* @param __HANDLE__ TIM handle.
* @param __AUTORELOAD__ specifies the Counter register new value.
* @retval None
*/
#define __HAL_TIM_SET_AUTORELOAD(__HANDLE__, __AUTORELOAD__) \
do{ \
(__HANDLE__)->Instance->ARR = (__AUTORELOAD__); \
(__HANDLE__)->Init.Period = (__AUTORELOAD__); \
} while(0)
这个宏
__HAL_TIM_SET_AUTORELOAD是 STM32 HAL 库中用于动态设置定时器自动重载值的核心宏。
硬件操作
(__HANDLE__)->Instance->ARR = (__AUTORELOAD__)
直接修改定时器的 ARR 寄存器(AutoReload Register),立即改变定时器的计数周期软件同步
(__HANDLE__)->Init.Period = (__AUTORELOAD__)
更新定时器句柄中的软件配置,保持软件状态与实际硬件一致为什么使用软硬件同步:
- 保持软件配置与实际硬件一致:在后续的操作中,HAL库可能会使用句柄中的
Init.Period值来进行某些计算或重新初始化。如果不更新这个值,软件中保存的配置就会与实际硬件寄存器中的值不一致,导致错误。- 避免重新初始化:这个宏的名称已经说明,它可以在不重新调用初始化函数(如
HAL_TIM_Init)的情况下改变ARR值。通常,重新初始化定时器会涉及更多的寄存器配置,并且可能会打断定时器的当前操作。而通过直接修改ARR并同步更新软件配置,就可以避免重新初始化。- 方便用户查询当前配置:如果用户需要知道当前的ARR值,可以直接从句柄的
Init.Period字段读取,而不必去读取硬件寄 存器(虽然读取硬件寄存器也是可行的,但软件读取更简单且不会增加总线访问)。影子寄存器机制
- 若
TIMx_CR1.ARPE=1(预装载使能),新ARR值在下个更新事件生效- 若
ARPE=0,新ARR值立即生效
/**
* @brief Get the TIM Autoreload Register value on runtime.
* @param __HANDLE__ TIM handle.
* @retval 16-bit or 32-bit value of the timer auto-reload register(TIMx_ARR)
*/
#define __HAL_TIM_GET_AUTORELOAD(__HANDLE__) ((__HANDLE__)->Instance->ARR)
和上面设置类似,不展开
/**
* @brief Set the TIM Prescaler on runtime.
* @param __HANDLE__ TIM handle.
* @param __PRESC__ specifies the Prescaler new value.
* @retval None
*/
#define __HAL_TIM_SET_PRESCALER(__HANDLE__, __PRESC__) ((__HANDLE__)->Instance->PSC = (__PRESC__))
这个宏 __HAL_TIM_SET_PRESCALER 是 STM32 HAL 库中用于动态设置定时器预分频值的核心宏。
对比其他宏
| 特性 | __HAL_TIM_SET_PRESCALER |
__HAL_TIM_SET_AUTORELOAD |
|---|---|---|
| 目标寄存器 | PSC | ARR |
| 影响 | 改变计数频率 | 改变计数周期 |
| 软件同步 | ❌ 不更新句柄 | ✅ 更新Init.Period |
| 使用频率 | 低频修改(时钟变化时) | 高频修改(动态调频) |
4、定时器中断相关代码
定时器中断函数:
/**
* @brief This function handles TIM7 global interrupt.
*/
void TIM7_IRQHandler(void)
{
/* USER CODE BEGIN TIM7_IRQn 0 */
/* USER CODE END TIM7_IRQn 0 */
HAL_TIM_IRQHandler(&htim7);
/* USER CODE BEGIN TIM7_IRQn 1 */
/* USER CODE END TIM7_IRQn 1 */
}
进入HAL_TIM_IRQHandler(&htim7)函数,我们会找到有关更新中断的回调函数:
/* TIM Update event */
if (__HAL_TIM_GET_FLAG(htim, TIM_FLAG_UPDATE) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_UPDATE) != RESET)
{
__HAL_TIM_CLEAR_IT(htim, TIM_IT_UPDATE);
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->PeriodElapsedCallback(htim);
#else
HAL_TIM_PeriodElapsedCallback(htim);
#endif /* USE_HAL_TIM_REGISTER_CALLBACKS */
}
}
5、整体代码
参数定义
/* USER CODE BEGIN PV */
static volatile uint32_t currentMS = 0;
char *str = "test successfully\r\n";
/* USER CODE END PV */
延时函数、获取当前时间毫秒数函数的声明与定义
/* USER CODE BEGIN PFP */
static void MyDelay(uint32_t Delay);
static uint32_t GetCurrentTime(void);
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
static void MyDelay(uint32_t Delay){
uint32_t time = GetCurrentTime() + Delay;
while(GetCurrentTime() < time);
}
static uint32_t GetCurrentTime(void){
return currentMS;
}
/* USER CODE END 0 */
主函数中启动定时器与串口发送
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
MX_TIM7_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim7); //ÖжϷ½Ê½¿ªÆô¶¨Ê±Æ÷
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
HAL_UART_Transmit(&huart1, (uint8_t *)str, strlen(str), HAL_MAX_DELAY);
MyDelay(1000);
// HAL_Delay(990);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
定时器中断回调函数:
/* USER CODE BEGIN 4 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
if(htim == &htim7){
currentMS++;
}
}
/* USER CODE END 4 */
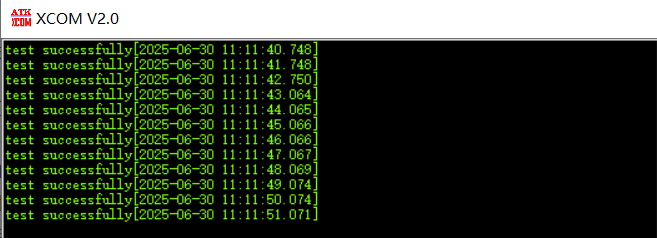
6、实验结果
主函数中的MyDelay(1000)中的参数是1000,即1000ms,从串口助手可以看出刚好1s发一次。
7、结语
学习记录,欢迎批评指正

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 34
34 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)