FOC学习笔记(6)等幅值变换与等功率变换
本文系统对比了磁场定向控制(FOC)中两种坐标变换方法:等幅值变换与等功率变换。等幅值变换保持信号幅值不变,但需功率补偿系数,适用于SVPWM调制等控制场景;等功率变换保持功率守恒,适合能量分析与无传感器控制。两种变换在Clark变换阶段系数不同(等幅值为1,等功率为√(2/3)),导致控制实现存在差异:等幅值需电流环后补偿,等功率可直接使用变换结果。实际应用中,TI电机库多采用等幅值变换,而学术
1. 引言
磁场定向控制(Field-Oriented Control, FOC)是实现交流电机高性能控制的核心技术,其核心思想是通过坐标变换将三相交流量解耦为直流量,从而简化控制。在FOC中,等幅值变换与等功率变换是两种常用的坐标变换方法,二者的数学定义、物理意义及对系统性能的影响存在显著差异。本文将从理论推导、变换矩阵、物理意义、实现差异及应用场景等方面,系统分析这两种变换的异同。
2. 坐标变换基础
FOC通常包含以下变换步骤:
-
Clark变换:将三相静止坐标系(ABC)转换为两相静止坐标系(αβ)。
-
Park变换:将αβ坐标系转换为旋转坐标系(dq)。
这两种变换均需满足“等幅值”或“等功率”约束条件。
3. 等幅值变换
定义:变换前后电压/电流信号的幅值保持不变。
3.1 Clark变换(等幅值形式)
三相到两相的变换矩阵为:
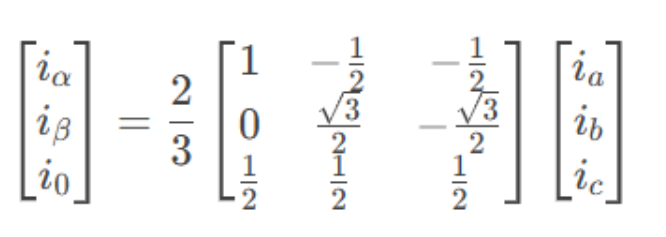
特点:
-
变换后αβ轴分量幅值与三相原始信号幅值相同。
-
零序分量i0通常在三相平衡系统中为零。
3.2 Park变换(等幅值形式)
αβ到dq的变换矩阵为:
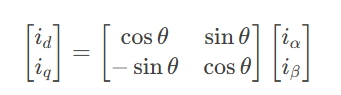
物理意义:旋转坐标系下的id、iq幅值与αβ轴分量相同。
3.3 等幅值变换的功率特性
-
功率不守恒:变换前后功率需乘以缩放系数。例如,三相功率
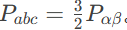 。
。 -
控制实现:需在电流环输出后补偿系数,确保实际绕组电流正确。
4. 等功率变换
定义:变换前后系统的瞬时功率保持不变(Pabc=Pαβ)。
4.1 Clark变换(等功率形式)
变换矩阵为:
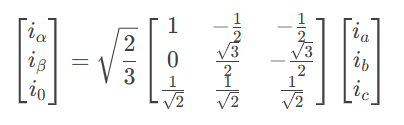
特点:
-
幅值缩放为原始信号的sqrt(2/3)倍。
-
功率直接守恒,无需额外补偿。
4.2 Park变换(等功率形式)
与等幅值Park变换形式相同,但因Clark阶段已缩放,整体功率仍守恒。
4.3 等功率变换的物理意义
-
能量一致性:适合需要精确功率计算的场合(如逆变器损耗分析)。
-
控制简化:电流环输出无需额外缩放,直接对应实际功率。
5. 两种变换的对比分析
| 特性 | 等幅值变换 | 等功率变换 |
|---|---|---|
| 幅值保持 | 是 | 否(缩放sqrt(2/3)) |
| 功率保持 | 否(需补偿系数) | 是 |
| 变换矩阵 | Clark系数为sqrt(2/3) | Clark系数为sqrt(2/3) |
| 控制实现 | 需电流环后补偿sqrt(2/3) | 直接使用变换结果 |
| 应用场景 | 注重信号幅值的控制(如SVPWM) | 需功率守恒的分析(如能量管理) |
6. 在FOC中的具体应用
6.1 等幅值变换的应用
-
SVPWM调制:电压矢量幅值直接对应逆变器输出,简化调制算法。
-
电流控制:PI调节器输出与电机绕组电流幅值一一对应,但需注意功率补偿。
6.2 等功率变换的应用
-
能量分析:精确计算电机输入功率与损耗。
-
无传感器控制:功率观测器设计更简洁。
7. 数学验证
以三相电流ia=Imcos(ωt)为例:
-
等幅值Clark变换:

三相功率
 ,两相功率
,两相功率 。
。 -
等功率Clark变换:

8. 总结
-
等幅值变换优势在于信号直观性,适合控制环路设计;等功率变换优势在于能量一致性,适合系统级分析。
-
实际FOC中,两种变换可通过系数转换兼容,需根据需求选择。例如,TI的电机库常用等幅值变换,而部分学术研究采用等功率变换。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 27
27 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)