DC-DC 电压环(4)
最后通过三型补偿的建模来计算电压环的零极点,通过系统传函和理想零极点来得到最终的补偿参数,从而调整系统稳定性和动态性能。三型补偿实际上是在二型补偿的基础上给FB加了前馈电容,因此本部分先对二型补偿建模,最后给模型加入前馈电容,讲解三型补偿。
最后通过三型补偿的建模来计算电压环的零极点,通过系统传函和理想零极点来得到最终的补偿参数,从而调整系统稳定性和动态性能。三型补偿实际上是在二型补偿的基础上给FB加了前馈电容,因此本部分先对二型补偿建模,最后给模型加入前馈电容,讲解三型补偿。
1、电压环控制逻辑与模型参数设置
输出电压Vo通过分压电阻分压得到VFB,将其与参考电压Vref进行比较,通过EA误差放大器得到误差电压Vc,Vc经过comp补偿消除了Buck存在的LC二阶极点与输出电容C2 ESR高频零点。将得到的补偿电压Vcomp与锯齿波进行比较控制SR触发器进而控制上下管驱动电压HSG、LSG实现电压反馈,控制的周期是由时钟信号clk决定的。具体结构如图1:
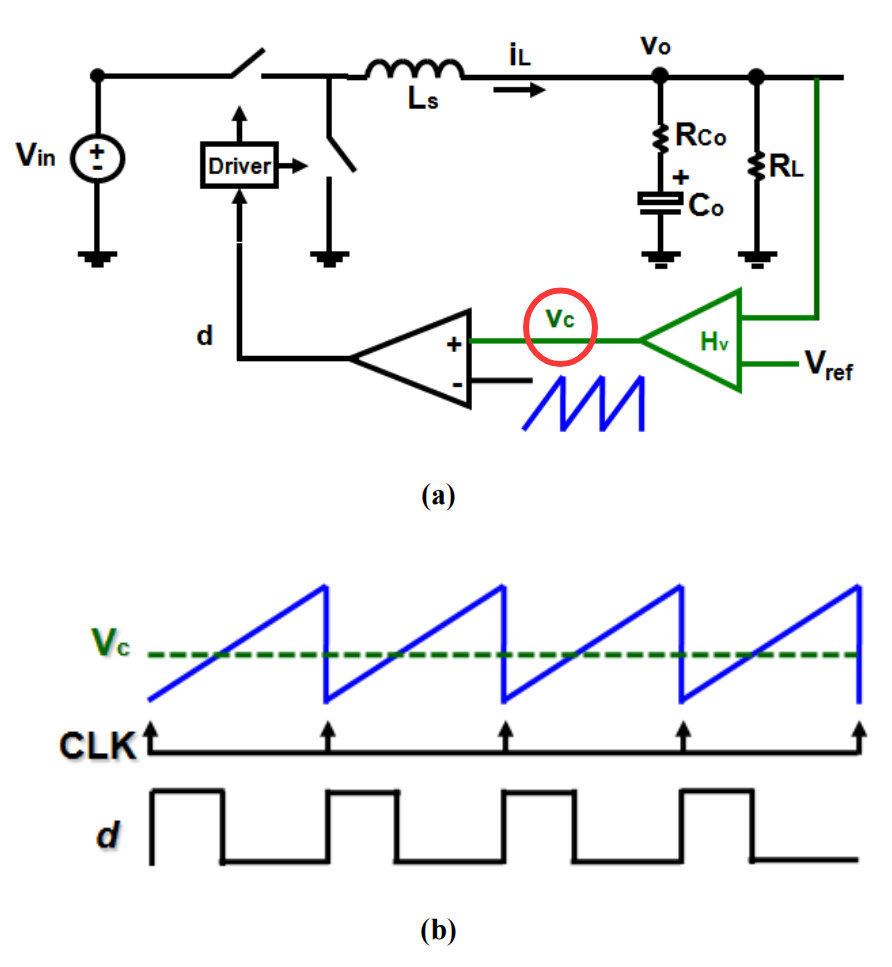
图1 电压环控制:(a)控制结构 (b)控制原理
开关电源的补偿设计中通常有两种接法:
- EA(Error Amplifier,电压型误差放大器),把补偿网络与FB连接。它的输出特性是低阻抗输出,驱动能力强,它会主动驱动其输出电压comp达到目标值。
- GM(Transconductance Amplifier,跨导放大器),把补偿网络直接接地。它是一个压控流源,输出阻抗高,把Vea转换为电流Icomp。
目前芯片gm接法是主流,一方面因为它在芯片中占的面积小可以降低成本,另一方面它的计算更为简单直观。gm接法的计算讲解较多,因此本部分主要讲解EA接法的建模。
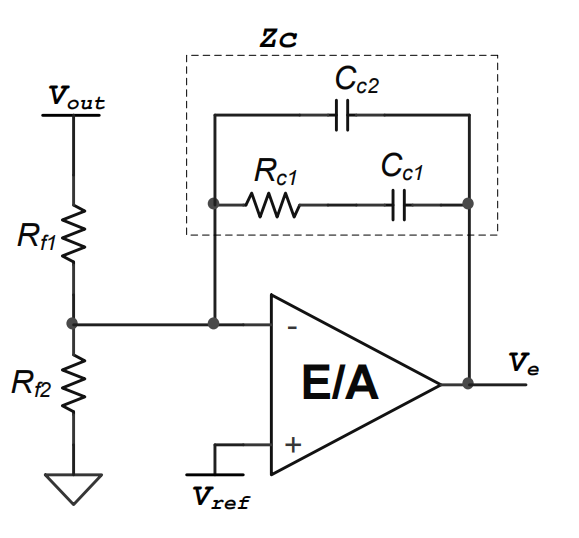
图2 EA接法的二型补偿
图2为EA接法下的二型补偿(PI),通过Rc1、Cc1、Cc2增加一个低频极点,一个高频极点和一个零点进行补偿。下面我们进行参数定义:
输入电压:Vin 输出电压:Vo 输出电流:Io 频率:Fs 电感值及其DCR:Lm与RL 输出电容及其ESR:Co与Ro1 参考电压:Vref
传导增益:Gm 反馈分压电阻:Rfb1与Rfb2 使用CR载,负载电阻:RLoad=Vo/Io 占空比:D=Vo/Vin
2、环路稳定性的判断条件与系统传函
(1) 奈奎斯特稳定性判据
根据奈奎斯特稳定性判据,当系统的相位裕量大于0度时,此系统是稳定的。
- 准则1:在穿越频率处,总开环系统要有大于30度的相位裕量;
- 准则2:为防止-2增益斜率的电路相位快速变化,系统的开环增益曲线在穿越频率附近 的增益斜率应为-1( -20db/10倍频程)
- 准则3: 增益裕量是开环系统的模的度量,该变化可能导致曲线刚好通过-1 点。一般需 要6db的增益裕量。
(2)穿越频率
根据经验值,一般选取穿越频率Fo在1/10到1/5的开关频率Fs之间
(3)系统传函
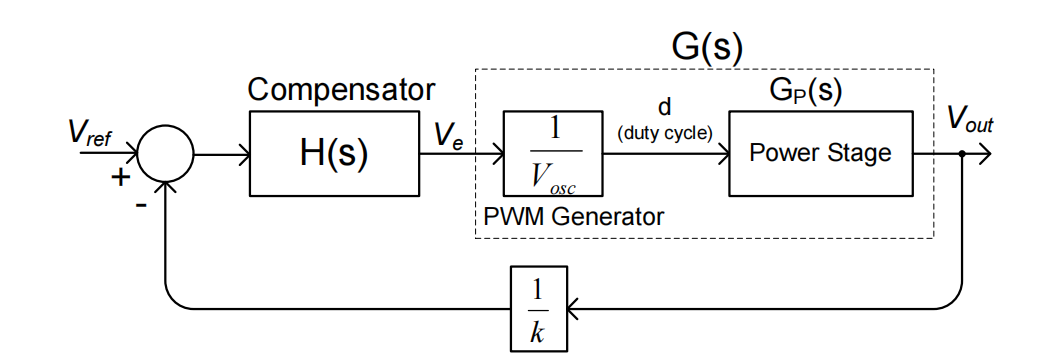
图3 同步buck转换器的模型框图

(2)
系统的环路增益M(s) 为
(3)
3、二型补偿设计
当输出电容Co及其ESR的零点频率小于闭环带宽(F0)时,使用二型补偿。频率分布如下:
图4 EA接法的二型补偿
EA接法的系统传函为:
(4)
Cc2一般选pf级电容,Cc1选nf级。Cc2<<Cc1,因此可以化简式(4):
(5)
式(4)的分子根为零点,分母根为极点,可得:
(6)
(7)
环路波特图与理想的环路增益如图5所示:
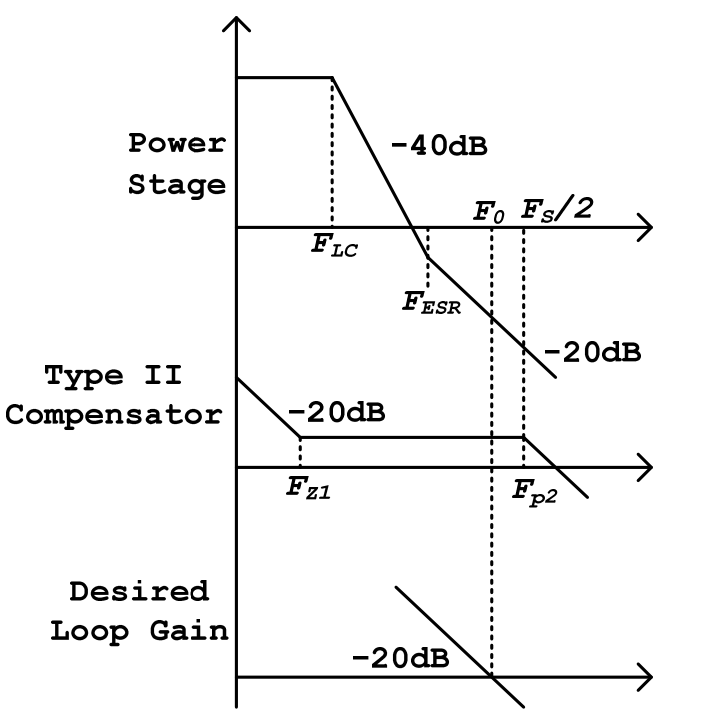
图5 二型补偿波特图
每个极点会使环路相位下降90度,而每个零点则会使相位上升90度。由于负反馈,补偿器最初会出现180度的相位偏移,为了确保系统的稳定性,当增益大于1(即0dB)时,环路的整体相位不应接近360度或0度。特别是在截止频率(F0)处,相位应至少保持45度(即45度相位裕度)。
由于补偿器在原点处有一个极点,因此补偿器的零点应设置在低于LC滤波器双极点的频率处,来确保环路相位不会在FLC附近接近0°。通常使用以下方程:
(8)
第二个补偿极点应小于开关频率大于穿越频率:
(9)
根据1中设置参数可以计算出EA接法的传函:
 (10)
(10)
Vosc表示锯齿波/三角波调制器信号的振幅。在交叉频率处,环路增益的振幅等于1。可得:
(11)
联立(5)、(10)、(11),可计算出二型补偿的具体参数:
(12)
(13)
(14)
4、三型补偿设计
实际应用中系统带宽(穿越频率)不够,可以通过增加前馈电容将整体上抬提高带宽,如图6所示:
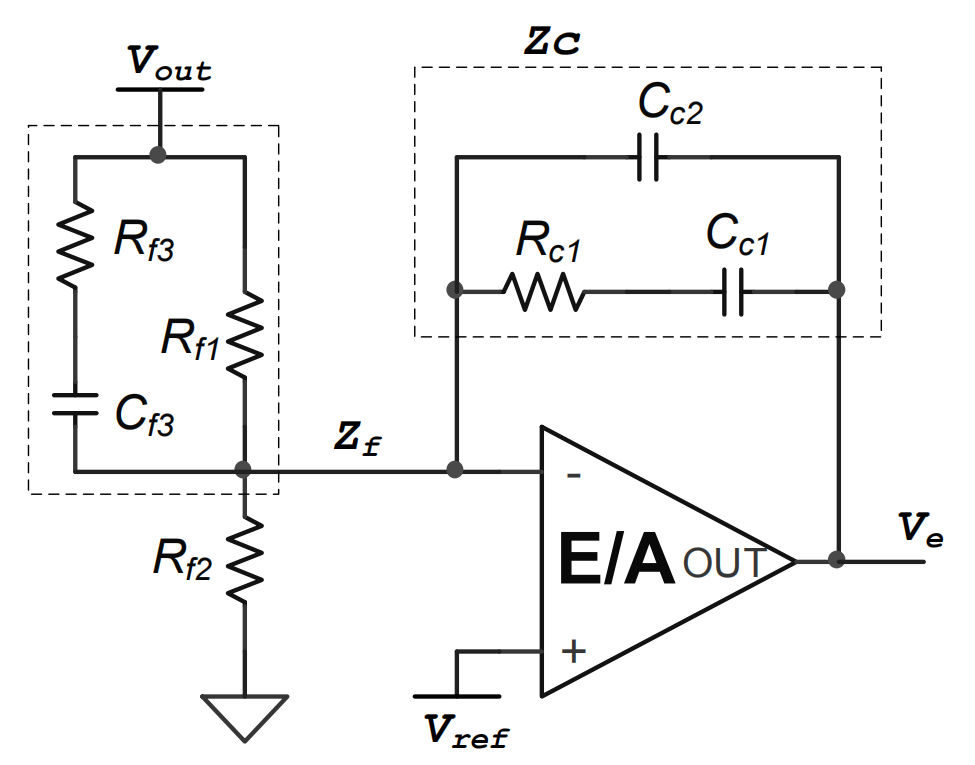
图6 EA接法的二型补偿
系统传函为:
(15)
Cc2<<Cc1,化简式(15)得:
(16)
系统的两零点和三极点分别为:
(17)
(18)
(19)
(20)
(21)
环路波特图与理想的环路增益如图7所示:
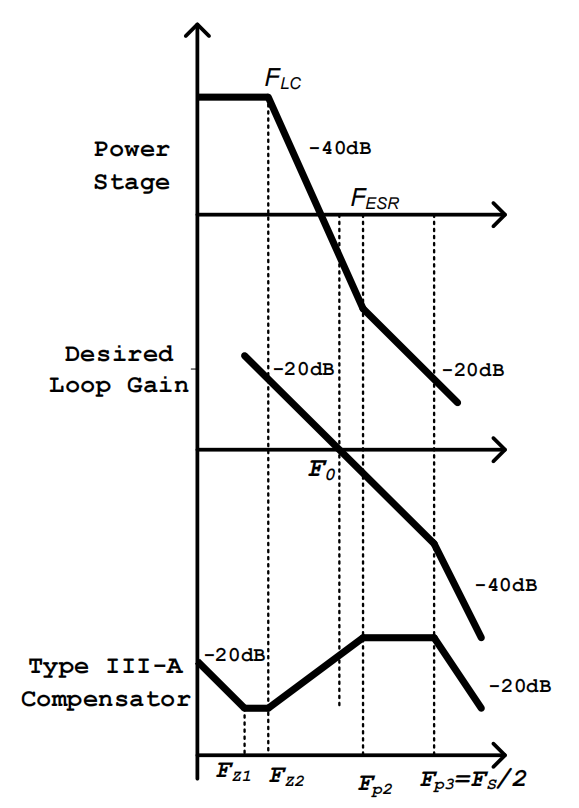
图7 三型补偿波特图
从图7对比图5可得,加了前馈电容后Fz1到Fp2补偿把整体曲线上抬了,从而推后穿越频率F0,因此和开头说的一样,加前馈电容可在一定范围内提高系统带宽。
据式(20)可得:
(22)
据式 (18)可得:
(23)
据分压电阻关系式可得:
(24)
据式 (17)可得:
(25)
据式 (21)可得:
(26)
上面讲述了二三型环路补偿的参数设计,实际应用中buck的环路除了系统的稳定性,调节时还应注意系统的动态和纹波:
1、动态·输出在带动态负载时会产生overshoot(过冲)与undershoot(下冲),其中过冲主要由Co产生的零点决定,环路主要调节下冲。减小Rc1或Cc1可以改善下冲。
2、纹波:输出纹波公式:
纹波也主要由Co的ESR决定。
Reference:https://www.infineon.com/dgdl/an-1162.pdf?fileId=5546d462533600a40153559a8e17111a

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 30
30 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)