Aruino 驱动舵机
摘要:本文介绍了Arduino驱动舵机的两种方法。第一种使用Arduino IDE自带的Servo库,通过简单代码实现舵机角度控制;第二种采用PWM信号直接控制,需手动设置脉冲宽度。文章还详细解释了舵机工作原理,指出其通过接收20ms周期、0.5-2.5ms脉宽信号来控制0-180度转角。两种方法均配有完整代码示例,分别展示了使用库函数和直接配置PWM寄存器实现舵机转动的具体实现方案,为Ardui
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。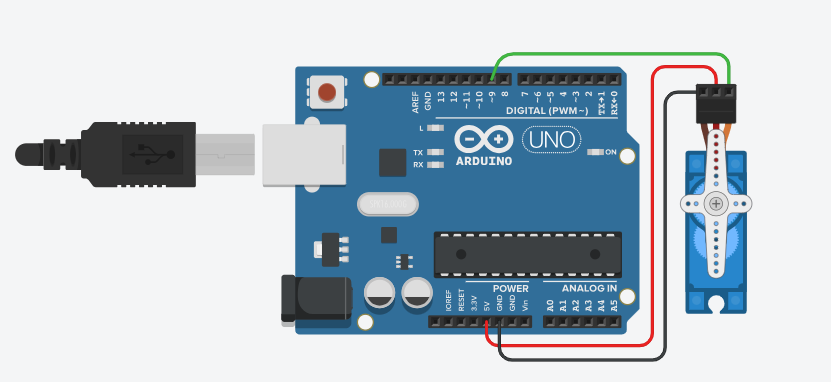
Arduino Uno驱动舵机的方法主要有以下两种:
一、使用Arduino IDE自带Servo库
Arduino IDE自带的Servo库可以简化舵机的控制,只需几行代码即可实现舵机的基本控制。
#include <Servo.h>
Servo myServo; // 创建Servo对象来控制舵机
int servoPin = 9; // 舵机信号引脚连接到Arduino的9号引脚
int angle = 0; // 舵机初始角度
void setup() {
myServo.attach(servoPin); // 将舵机连接到指定引脚
}
void loop() {
// 从0度到180度转动舵机
for (angle = 0; angle <= 180; angle += 1) {
myServo.write(angle); // 告诉舵机转到指定角度
delay(15); // 等待舵机转动到指定位置
}
// 从180度回到0度
for (angle = 180; angle >= 0; angle -= 1) {
myServo.write(angle); // 告诉舵机转到指定角度
delay(15); // 等待舵机转动到指定位置
}
}
二、使用PWM信号直接控制舵机
除了使用Servo库,也可以通过Arduino的PWM功能直接控制舵机。这种方法更加灵活,可以精确控制PWM信号的宽度。
int servoPin = 9; // 舵机信号引脚连接到Arduino的9号引脚
void setup() {
pinMode(servoPin, OUTPUT); // 将舵机控制引脚设置为输出模式
TCCR1A = 0; // 重置TCCR1A寄存器
TCCR1B = 0; // 重置TCCR1B寄存器
TCNT1 = 0; // 重置计数器值
// 设置PWM频率为50Hz (20ms周期)
ICR1 = 39999; // 设置TOP值,确定PWM周期
TCCR1B |= (1 << WGM13); // 设置为模式14:PWM, Phase and Frequency Correct, ICR1作为TOP
TCCR1B |= (1 << CS11) | (1 << CS10); // 设置预分频为64
TCCR1A |= (1 << COM1A1); // 设置为非反转PWM模式
}
void loop() {
// 从0度到180度转动舵机
for (int pulseWidth = 544; pulseWidth <= 2400; pulseWidth += 5) {
OCR1A = pulseWidth; // 设置PWM脉冲宽度
delay(15); // 等待舵机转动到指定位置
}
// 从180度回到0度
for (int pulseWidth = 2400; pulseWidth >= 544; pulseWidth -= 5) {
OCR1A = pulseWidth; // 设置PWM脉冲宽度
delay(15); // 等待舵机转动到指定位置
}
}
舵机控制原理
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分。以180度角度舵机为例,对应的控制关系是这样的:
- 0.5ms--------------0度;
- 1.0ms------------45度;
- 1.5ms------------90度;
- 2.0ms-----------135度;
- 2.5ms-----------180度;
使用Servo库时,write()函数接受0-180的角度值,库会自动将其转换为对应的脉冲宽度。而使用PWM直接控制时,需要手动计算并设置脉冲宽度值。
#include <Servo.h>
Servo myServo;
int servoPin = 14; // 使用D5引脚(GPIO14),避免使用TX/RX等特殊引脚
void setup() {
myServo.attach(servoPin);
Serial.begin(115200);
Serial.println("Servo Control Ready!");
}
void loop() {
// 角度控制示例
for (int angle = 0; angle <= 180; angle += 10) {
myServo.write(angle);
Serial.print("Angle: ");
Serial.println(angle);
delay(500);
}
delay(1000);
}

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 3
3 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)